Термошумовий спосіб вимірювання опорів високоомних об’єктів
Номер патенту: 14264
Опубліковано: 15.05.2006
Автори: Скрипник Юрій Олексійович, Каламєєць Тетяна Петрівна, Курко Володимир Романович

Формула / Реферат
Термошумовий спосіб вимірювання опорів високоомних об'єктів, при якому з досліджуваного об'єкта знімають шумову напругу, вимірюють постійну напругу, за значенням якої визначають опір досліджуваного об'єкта, який відрізняється тим, що шумову напругу розгалужують на дві напруги, одну з яких періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану напругу, яку підсилюють в смузі частот високочастотних теплових шумів та квадратично детектують, виділяють із детектованої напруги змінну складову з низькою частотою інвертування, вибірково підсилюють низькочастотну змінну напругу, синхронно її детектують та усереднюють.
Текст
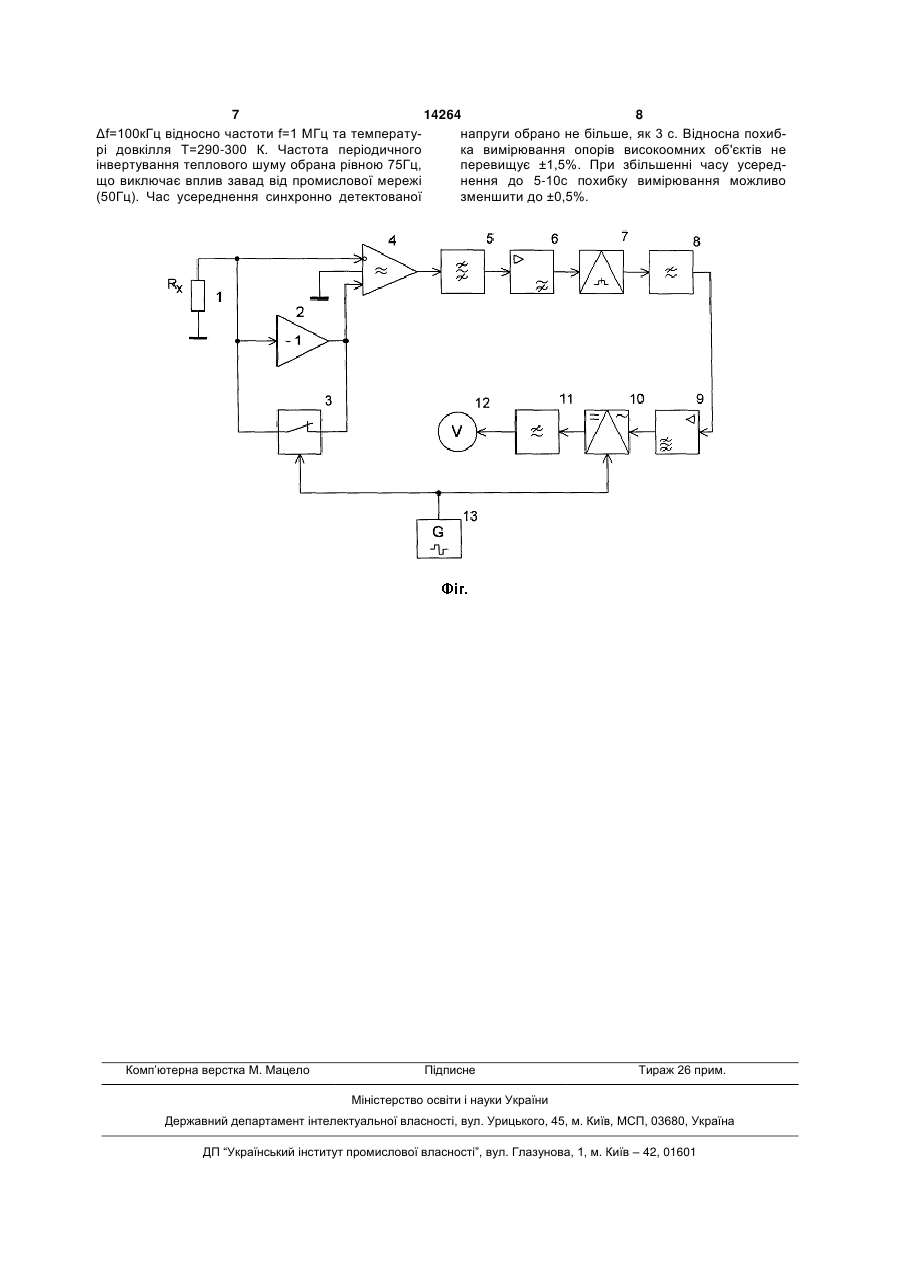
Термошумовий спосіб вимірювання опорів високоомних об'єктів, при якому з досліджуваного об'єкта знімають шумову напругу, вимірюють постійну напругу, за значенням якої визначають опір досліджуваного об'єкта, який відрізняється тим, що шумову напругу розгалужують на дві напруги, одну з яких періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану напругу, яку підсилюють в смузі частот високочастотних теплових шумів та квадратично детектують, виділяють із детектованої напруги змінну складову з низькою частотою інвертування, вибірково підсилюють низькочастотну змінну напругу, синхронно її детектують та усереднюють. Корисна модель відноситься до вимірювальної техніки і може бути використана для визначення опорів високоомних об'єктів, таких як електрична ізоляція, високоомні резистори, електричний опір різноманітних речовин і матеріалів, опір втрат, тощо за дисперсією теплових шумів високоомного об'єкту без зовнішньої напруги. В будь-якому фізичному об'єкті, який має активні втрати електричної енергії, присутні теплові шуми. Тепловий шум або теплові електричні флуктуації - як наслідок теплового хаотичного руху носіїв струму, що знаходяться в тепловій рівновазі з молекулами речовини об'єкту. Такими носіями струму є вільні електрони, іони та дірки в напівпровідникових матеріалах. В загальному випадку тепловий шум обумовлений появою термозбуджених поляризуємих молекул, що утворюють елементарні флуктуючі диполі [див. Ван-дер-Зил А. Шум. Источники, описание, измерение. / Пер. с англ. М.: Сов. радио, 1975 - с.27-30]. Відомий термошумовий спосіб вимірювання опорів високоомних об'єктів [див. а.с. №195161, МПК G01K7/01, бюл. №9, 1967], що заснований на вимірюванні дисперсії теплових шумів об'єкту, що досліджується: U 2 4kT fR , Т - термодинамічна температура; Δf - смуга частот вимірюємого теплового шу де U 2 - середній квадрат напруги (дисперсія) теплового шуму; k - постійна Больцмана; (13) 14264 (11) UA (19) R - опір досліджуваного об'єкту. В відповідності з приведеним співвідношенням (формулою Найквіста) дисперсія теплового шуму пропорційна електричному опору R і зростає зі збільшенням опору. Складність виділення і вимірювання теплових шумів на фоні апаратурних шумів, як теплового, так і шумів інших типів (дробових, контактних, флікер-шумів, тощо), не дозволяє отримати достатню точність вимірювання опорів. Відомий термошумовий спосіб вимірювання опорів високоомних об'єктів [див. Карба Л.П. Установка для измерения коэффициента шума и активного сопротивления двухполюсников на радиочастотах // Известия ЛЭТИ им. В.И. Ульянова (Ленина). - 1969. - вып.80, с.57-60], в якому шумову напругу, що знімається з досліджуваного об'єкту, фільтрують, виділяють високочастотні теплові шуми і пригнічують низькочастотні шуми нетеплового характеру. Однак високочастотні теплові шуми підсилюючих елементів вимірювальної схеми сумуються з тепловими шумами досліджуваного об'єкту, що спотворює результати вимірювання опорів і знижує їх достовірність. Відомий також термошумовий спосіб вимірювання опорів високоомних об'єктів [див. Скрипник Ю.О., Курко В.Р., Скрипник В.Й. Шумова кондукто U му; 3 14264 4 метрія / Сучасні інформаційні та енергозберігаючі високоомних об'єктів. технології життєзабезпечення людини. Збірник На Фіг. зображено вимірювальну схему, за донаукових праць. - К.: 2002, вип.12, с.109-112], при помогою якої реалізується запропонований спосіб якому з об'єкту, що досліджується знімають шумотермошумового вимірювання опорів високоомних ву напругу, вимірюють постійну напругу, за знаоб'єктів. ченням якої визначають опір досліджуваного об'єПозицією 1 позначено досліджуваний висококту. омний об'єкт з опором RХ. В вимірювальну схему Крім того, шумову напругу підсилюють і звовходять інвертор 2, що шунтується за допомогою дять до квадрату. автоматичного ключа 3, диференціальний підсиСкладністю відомого способу є розділення вилювач 4, до виходу якого підключені послідовно мірюємого інформаційного теплового шуму об'єкту з'єднані смуговий фільтр 5, підсилювач високої і власних шумів вимірювальної апаратури. Справа частоти 6, квадратичний детектор 7, фільтр нижніх в тім, що корисний шумовий сигнал і шуми апарачастот 8, вибірковий підсилювач низької частоти 9, тури - статистично нерозрізнені випадкові процеси, синхронний детектор 10, другий фільтр нижніх що перекривають один одного. Крім того, корисний частот 11 і вольтметр 12. Позицією 13 позначено сигнал нищівно малий (близько одиниць та долей мультивібратор, який з'єднано з керуючим входом мікровольта за напругою і близько 10-18-10-16 за автоматичного ключа 3 і керуючим входом синхпотужністю). Тому після необхідного підсилення ронного детектора 10. шумового сигналу досліджуваного об'єкту відноСпосіб здійснюється наступним чином. шення сигнал-завада стає набагато меншим за Шумовий інформаційний сигнал UХ(t), який одиницю. В цих умовах вимірювання дисперсії знімається з опору RХ високоомного об'єкту 1, розтеплових шумів об'єкта супроводжується великими галужується на дві одинакові напруги похибками, що знижує точність визначення опорів U1(t)=U2(t)=UХ(t). Одна з розгалужених напруг U1(t) високоомних об'єктів. періодично інвертується за допомогою інвертора 2 В основу корисної моделі поставлена задача і автоматичного ключа 3, який періодично шунтує створити такий термошумовий спосіб вимірювання інвертор 2. Якщо шумовий сигнал UХ(t) представи опорів високоомних об'єктів, в якому введення ти в комплексному вигляді як UX , то періодично нових операцій забезпечило би підвищення точноінвертований сигнал U1(t) можливо представити як сті термошумового вимірювання опорів високоом часову послідовність комплексних напруг U1 і них об'єктів. Поставлена задача вирішується тим, що в U1 . термошумовий спосіб вимірювання опорів високо Неінвертовану напругу U2 порівнюють з періомних об'єктів, при якому з об'єкту, що досліджується знімають шумову напругу, вимірюють пос одично інвертованою напругою U1 і U1 , за дотійну напругу, за значенням якої визначають опір помогою диференціального підсилювача 4, власні досліджуваного об'єкту, згідно корисної моделі, шуми якого зазвичай перевищують інформаційний шумову напругу розгалужують на дві напруги, одну шум UX . При замкненому автоматичному ключі 3 з яких періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, інвертування інформаційного шуму відсутнє і різотримують різницеву модульовану напругу, яку ницева напруга на виході диференціального підпідсилюють в смузі частот високочастотних тепло силювача ( U1 U2 0 ) визначається тільки його вих шумів та квадратично детектують, виділяють із власними шумами детектованої напруги змінну складову з низькою частотою інвертування, вибірково підсилюють ниU3 UH UB , (1) зькочастотну змінну напругу, синхронно її детек - напруга низькочастотних шумів, приде UH тують та усереднюють. ведена до виходу диференціального підсилювача; Введення в термошумовий спосіб вимірюван ня опорів високоомних об'єктів операцій по розгаUB - напруга високочастотних шумів, привелуженню шумової напруги, що знімається з дослідена до виходу диференціального підсилювача. джуваного об'єкту, на дві напруги, одну із яких В розімкнутому стані автоматичного ключа 3 періодично інвертують з низькою частотою, порівна прямий вхід диференціального підсилювача 4 нянню періодично інвертованої напруги з неінвер діє інвертована напруга - U1 . На інверсний вхід тованою, підсиленню різницевої модульованої диференціального підсилювача продовжує постунапруги в смузі частот високочастотних теплових шумів, квадратичному детектуванню підсиленої пати напруга U2 , яка інвертується в самому підвисокочастотної напруги, виділенню із детектовасилювачі. При підсиленні в диференціальному ної напруги змінної складової з низькою частотою підсилювачі двох інвертованих напруг ( U1 і U2 ) інвертування, вибірковому підсиленню низькочастотної змінної напруги, яку синхронно детектують і на його виході формується сумарна напруга інфоусереднюють, дозволяє відокремити сигнал, що рмаційних шумів на фоні власних шумів підсилюпропорційний дисперсії високочастотного теплововача: го шуму, від високочастотних апаратурних шумів в U4 UH UB 2k1UX , (2) смузі підсилення модульованого сигналу і низькоде k1 - коефіцієнт підсилення диференціальночастотних шумів детектора в смузі підсилення ниго підсилювача. зькочастотного сигналу, що забезпечує підвищенАвтоматичний ключ 3 керується мультивібраня точності термошумового вимірювання опорів 5 14264 6 тором 13, частоту перемикань якого обирають в мів, що потрапляють в смугу пропускання вибіркообласті низьких частот (50-300Гц). В результаті вого підсилювача. періодичних замикань-розмикань автоматичного Потрібно врахувати, що теплові шуми UX виключа на виході диференціального підсилювача 4 сокоомного об'єкту і високочастотні шуми UB дивиникає різницева модульована напруга, що складається із пакетів нерівних напруг (1) і (2). Модуференціального підсилювача між собою некорельована частотою інвертування напруга підсилюльовані. Тому їх усереднений добуток буде рівним: ється підсилювачем високої частоти 6 в смузі (9) UBU X 0 . частот смугового фільтру 5, який подавляє низьВ той же час середній квадрат шумової напрукочастотну шумову напругу і пропускає високочастотну шумову напругу. ги U2 представляє собою дисперсію теплових В смугу частот підсиленої напруги в основному X попадають високочастотні теплові шуми опору 1 шумів, яка в відповідності з формулою Найквіста високоомного об'єкту, теплові та дробові шуми визначається виразом: диференціального підсилювача 4. Тому складові (10) U2 4kT fRX , підсиленої модульованої напруги можна предстаX вити в вигляді пакетів тільки високочастотних наде k - постійна Больцмана; пруг: Т - термодинамічна температура об'єкту шуму; Δf - смуга частот, що задається смуговим фіU5 k 2UB , (3) льтром 5; RX - опір 1 досліджуваного об'єкту. ˆ (4) U6 k 2(UB 2k1UX ) , З урахуванням виразу (9) низькочастотна напруга (8) пропорційна дисперсії теплових шумів: де k1 - коефіцієнт підсилення підсилювача високої частоти. 16 2 2 U11 k k k 3k 4S1U 2Sin2 Ft UH( t ) . (11) Складові модульованої напруги (3) і (4) квад1 2 X ратично детектуються в блоці 7 і усереднюються в Низькочастотну напругу (11) синхронно детекфільтрі нижніх частот 8. Продетектовані і усередтують детектором 10, що керується мультивібранені напруги представимо як постійні складові натором 13, і усереднюють другим фільтром нижніх пруг, які слідують з частотою інвертування: частот 11. В результаті усереднення пригнічується на інтервалі вплив низькочастотних шумів ΔUH(t) і згладжується 1 синхронно детектована напруга. Постійна складоU7 k3S1 k 2UB на інтервалі 0 t , (5) 2F ва цієї напруги, що вимірюється вольтметром 12, пропорційна тільки дисперсії високочастотних теплових шумів: U8 k3S1 k 2 UB 2k1UX на інтервалі 16 2 2 U12 k k k 3k 4S1S2k 5 U 2 , (12) (6) 1 2 X 1 1 , t де S2 - крутизна перетворення синхронного 2F F детектора; k5 - коефіцієнт передачі другого фільтра нижде S1 - крутизна квадратичного детектування; ніх частот. k3 - коефіцієнт передачі фільтра нижніх частот; З урахуванням значення дисперсії теплових F - частота періодичного інвертування; шумів (10) отримаємо: - означає операцію усереднення. U13=SORX, (13) В часовій послідовності усереднених напруг 64 2 2 де SO kk k k 3k 4S1S2T f - результуюча (5) і (6) присутня напруга низькочастотної огинаю1 2 чої модульованої напруги: крутизна перетворення опору в напругу [В/Ом]. U9 U8 U7 sign sin 2 Ft UH( t ) , 2 (7) де sign sin 2πFt - низькочастотна напруга прямокутної форми; UH(t) - низькочастотні шуми квадратичного детектора. Вибірковим підсилювачем 9, налаштованим на частоту F перемикань мультивібратора 13, виділяється і підсилюється основна гармоніка низькочастотної огинаючої (7). З урахуванням значень напруг (5) і (6) низькочастотна напруга на виході вибіркового підсилювача 9 буде такою: 16 U10 k 4k3S1 k1U2 UBUX sin 2 Ft UH ,(8) X де k4 - коефіцієнт підсилення вибіркового підсилювача; UH - частина напруги низькочастотних шу Таким чином, постійна напруга, що вимірюється пропорційна опору досліджуваного об'єкту і не залежить від рівня власних шумів диференціального підсилювача, які визначають низьке відношення інформаційний шум - власний шум на його виході. Вплив низькочастотних шумів нетеплового характеру пригнічено підсиленням шумової напруги в смузі частот високочастотних теплових шумів, а також вибірковим підсиленням низькочастотної змінної напруги на частоті періодичного інвертування з послідуючим синхронним детектуванням і усередненням. Завдяки цьому забезпечується можливість вимірювання великих опорів за рівнем їх теплових шумів без зовнішньої напруги. При цьому знімаються обмеження на відношення сигнал-завада на вході вимірювальної апаратури. Дослідження показали можливість вимірювання великих опорів в діапазоні 1-100МОм та вище при підсиленні на 80дБ в смузі пропускання 7 14264 8 Δf=100кГц відносно частоти f=1 МГц та температунапруги обрано не більше, як 3 с. Відносна похибрі довкілля T=290-300 К. Частота періодичного ка вимірювання опорів високоомних об'єктів не інвертування теплового шуму обрана рівною 75Гц, перевищує ±1,5%. При збільшенні часу усередщо виключає вплив завад від промислової мережі нення до 5-10с похибку вимірювання можливо (50Гц). Час усереднення синхронно детектованої зменшити до ±0,5%. Комп’ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюThermal method for measuring high resistance of an object
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Kalameiets Tetiana Petrivna
Назва патенту російськоюТермошумовой способ измерения высокого сопротивления объекта
Автори російськоюСкрипник Юрий Алексеевич, Каламеец Татьяна Петровна
МПК / Мітки
МПК: G01R 27/00
Мітки: опорів, високоомних, термошумовий, об'єктів, спосіб, вимірювання
Код посилання
<a href="https://ua.patents.su/4-14264-termoshumovijj-sposib-vimiryuvannya-oporiv-visokoomnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Термошумовий спосіб вимірювання опорів високоомних об’єктів</a>
Пристрій для виміру опорів високоомних об’єктів
Номер патенту: 67820
Опубліковано: 15.07.2004
Автори: Супрун Наталія Петрівна, Скрипник Юрій Олексійович, Суглоба Маргарита Олександрівна
МПК: G01R 27/00, G01R 27/02, G01R 17/00
Мітки: об'єктів, високоомних, виміру, опорів, пристрій
Формула / Реферат:
Пристрій для виміру опорів високоомних об'єктів, що містить генератор випробної напруги, автоматичний перемикач, входи якого з’єднані з потенційним і заземленими виходами генератора випробної напруги, дві вхідні клеми для підключення досліджуваного об'єкта, одна з яких з'єднана з виходом автоматичного перемикача, друга клема з'єднана з високоомним входом підсилювача, до виходу якого підключені послідовно з'єднані амплітудний детектор і фільтр...
Термошумовий пристрій для вимірювання температури
Номер патенту: 48268
Опубліковано: 15.08.2002
Автори: Скрипник Юрій Олексійович, Маковська Вікторія Юріївна
МПК: G01K 7/30
Мітки: вимірювання, пристрій, температури, термошумовий
Формула / Реферат:
1. Термошумовий пристрій для вимірювання температури, який складається з двох підвищувальних трансформаторів, вторинні обмотки яких з'єднані послідовно, а їх середня точка заземлена, двох підсилювачів, входи яких з'єднані з потенціальними кінцями вторинних обмоток підвищувальних трансформаторів, суматора, перший вхід якого з'єднаний з виходом одного підсилювача, а другий вхід суматора через автоматичний перемикач та інвертуючий трансформатор...
Пристрій для вимірювання великих опорів у колах високої напруги
Номер патенту: 44346
Опубліковано: 15.02.2002
Автори: Скирута Михайло Андрійович, Кущинський Олег Анатолійович, Скрипник Юрій Олексійович
МПК: G01R 27/02
Мітки: опорів, пристрій, високої, колах, напруги, вимірювання, великих
Формула / Реферат:
1. Пристрій для вимірювання великих опорів у колах високої напруги, який містить джерело високої напруги промислової частоти, високовольтну шину, перший низькоомний калібрований резистор, з'єднаний послідовно з контрольованим об’єктом, вольтметр та загальну шину живлення, який відрізняється тим, що в нього введені послідовно з'єднані другий низькоомний калібрований резистор і магазин резисторів, з'єднаний виходом з загальною шиною живлення,...
Пристрій вимірювання активного, реактивного, повного опорів, активної, реактивної та повної потужностей в електротехнічних системах
Номер патенту: 60856
Опубліковано: 15.10.2003
Автори: Сидоренко Костянтин Миколайович, Соченко Петро Степанович, Зеленков Олександр Аврамович, Пазюк Олексій Вячеславович
МПК: G01R 27/02
Мітки: повної, вимірювання, електротехнічних, активної, повного, пристрій, активного, реактивного, потужностей, системах, реактивної, опорів
Формула / Реферат:
Пристрій вимірювання активного, реактивного, повного опорів, активної, реактивної та повної потужностей в електротехнічних системах, який містить послідовно з'єднані резистор навантаження, еталонний резистор, модуль вимірювань потужностей, повного, активного та реактивного опорів, який складається з першого, другого та третього квадраторів, суматора, першого, другого та третього перетворювачів, першого та другого блоків ділення, першого,...
Пристрій для вимірювання дисперсії шумових сигналів
Номер патенту: 11031
Опубліковано: 15.12.2005
Автори: Єфименко Владислав Борисович, Холоденко Вероніка Миколаївна, Скрипник Юрій Олексійович
МПК: G01R 19/02
Мітки: пристрій, дисперсії, сигналів, шумових, вимірювання
Формула / Реферат:
Пристрій для вимірювання дисперсії шумових сигналів, що містить повторювач напруги, до входу якого підключена вхідна клема, квадратор, до виходу якого підключений інтегратор і вимірювальний прилад, який відрізняється тим, що в нього введені інвертор, автоматичний ключ, диференційний підсилювач, вибірковий підсилювач, синхронний детектор, фільтр нижніх частот і мультивібратор, при цьому інвертор зашунтований автоматичним ключем і підключений...
Попередній патент: Машина для двоїння і вирівнювання деталей взуття по товщині
Наступний патент: Муфта
Випадковий патент: Спосіб резекції гортані