Термошумовий вимірювач
Номер патенту: 16535
Опубліковано: 15.08.2006
Автори: Каламєєць Тетяна Петрівна, Скрипник Юрій Олексійович
Формула / Реферат
Термошумовий вимірювач, що містить імпедансний датчик, диференціальний підсилювач та високочастотний підсилювач з'єднаний з квадратичним детектором, який відрізняється тим, що додатково введені зразковий резистор, перемикач, паралельно з'єднані між собою ключ і інвертор, смуговий фільтр, інтегруючий аналого-цифровий перетворювач і мікро-ЕОМ з цифровим індикатором, при цьому один з входів перемикача з'єднаний з потенціальним затискачем імпедансного датчика, другий з'єднаний з потенціальним затискачем зразкового резистора, вихід перемикача з'єднаний з прямим входом диференціального підсилювача та через інвертор з його інверсним входом, вихід диференціального підсилювача з'єднаний зі входом смугового фільтра, вихід якого з'єднаний зі входом високочастотного підсилювача, вихід квадратичного детектора з'єднаний зі входом інтегруючого аналого-цифрового перетворювача, цифровий вихід якого підключений до вхідного порту мікро-ЕОМ, а керуючі входи перемикача і ключа підключені до вихідних її портів.
Текст
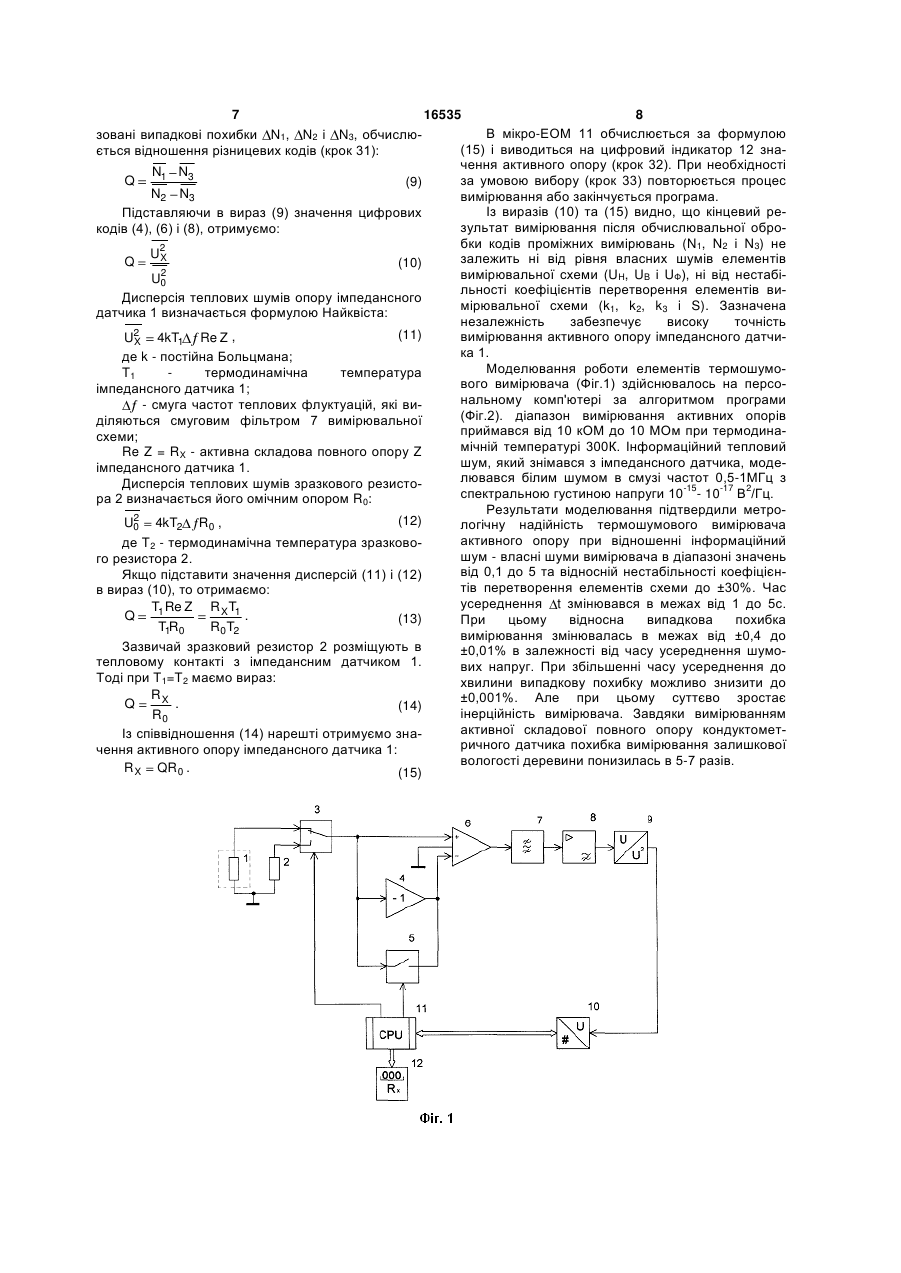
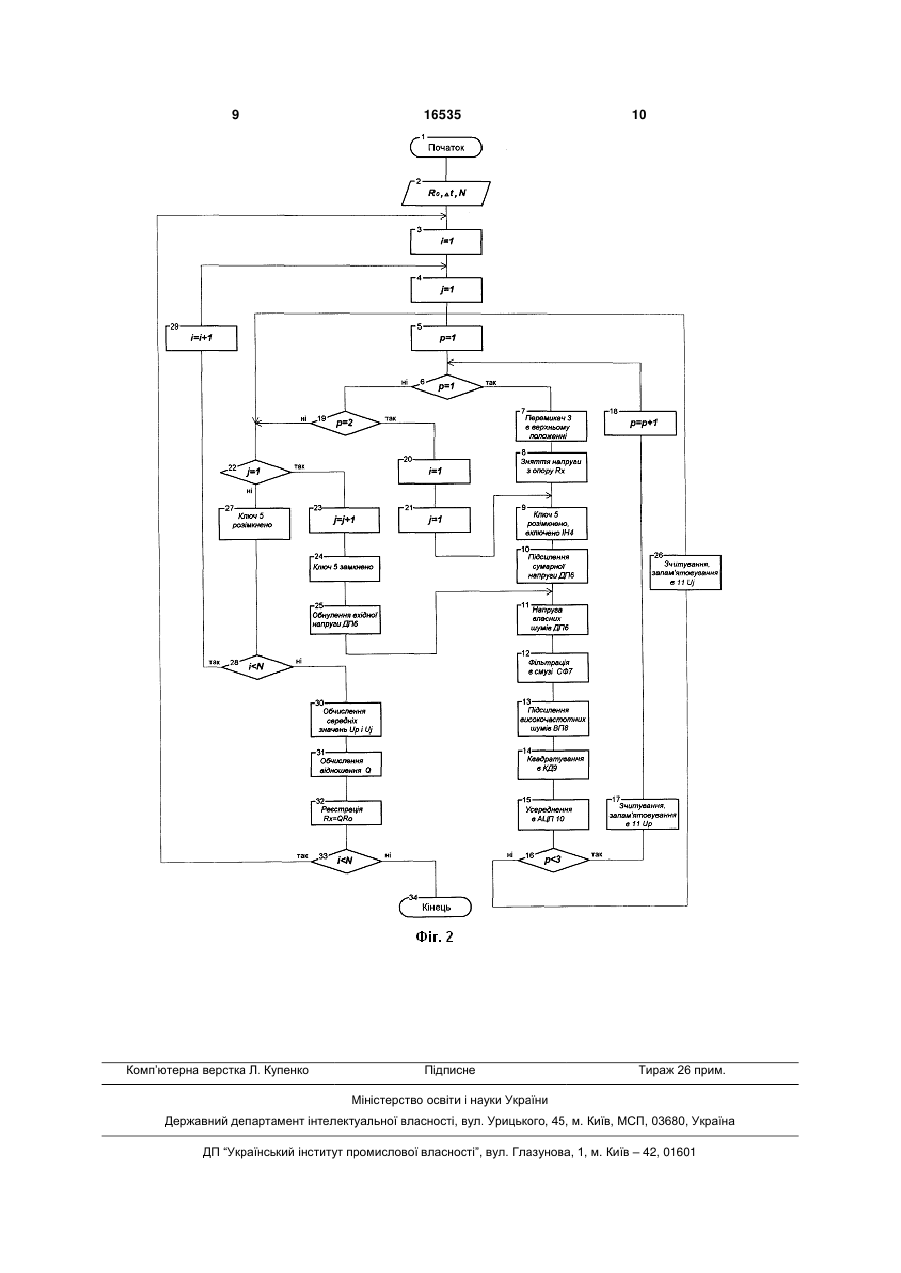
Термошумовий вимірювач, що містить імпедансний датчик, диференціальний підсилювач та високочастотний підсилювач з'єднаний з квадратичним детектором, який відрізняється тим, що додатково введені зразковий резистор, перемикач, паралельно з'єднані між собою ключ і інвертор, смуговий фільтр, інтегруючий аналого-цифровий перетворювач і мікро-ЕОМ з цифровим індикато 3 16535 4 та вимірюється постійна складова усередненої рювача, цифровий вихід якого підключений до напруги. Результат вимірювання виявляється вхідного порту мікро-ЕОМ, а керуючі входи перепропорційним активній складовій повного опору микача і ключа підключені до вихідних її портів. досліджуваного об'єкту. Але високочастотні власні Введення в термошумовий вимірювач мікрошуми підсилювача співрозмірні з інформаційним ЕОМ з цифровим індикатором, зразкового резисшумом досліджуваного об'єкту і значною мірою тора, перемикача і ключа, які керуються від мікроспотворюють результат вимірювання. ЕОМ, інвертора, смугового фільтра та інтегруючоВідомий також термошумовий вимірювач [див. го аналого-цифрового перетворювача дозволило Патент України №62760А, МПК G01N27/02, 2003р., при розімкнутому ключі послідовно в часі за допобюл.№12], що містить імпедансний датчик, могою перемикача перетворювати шумову напругу диференціальний підсилювач, та високочастотний досліджуємого опору і зразкового резистора спільпідсилювач з'єднаний з квадратичним детектором. но з власними шумами підсилювачів в цифрові Крім того, термошумовий вимірювач містить коди, які запам'ятовуються в мікро-ЕОМ, при запослідовно з'єднані фільтр нижніх частот, вибіркомкнутому ключі -перетворювати тільки власні шувий підсилювач низької частоти, виходи якого чеми підсилювачів в цифровий код, який також зарез автоматичний перемикач з'єднані через вихідпам'ятовується. Подальша обчислювальна ний фільтр нижніх частот з вимірювальним обробка в микро-ЕОМ цифрових кодів, що засноприладом, керуючий вхід автоматичного перемивана на відніманні власних шумів із результатів кача підключено до виходу генератора напруги сумарних вимірювань і подальше ділення в цифпідвищеної частоти через подільник частоти. ровому вигляді одного зкорегованого результату В цьому вимірювачі автоматично вимірювання на другий дозволяє отримати код виключається вплив власних шумів високочастотвідношення досліджуваного опору до зразкового ного підсилювача, фільтра і квадратичного детекопору без впливу власних шумів підсилювачів і тора. Але шуми вхідного диференціального квадратичного детектора, що забезпечує високу підсилювача, які найбільш впливають на результат точність вимірювання без впливу зовнішніх електвимірювання, залишаються некомпенсованими. ричних напруг. Крім того, результуючий коефіцієнт перетворення Корисна модель представлена на зображенвимірюємого опору в напругу, який визначає нях, де Фіг.1 - функціональна схема термошумовопостійність чутливості вимірювання, в дійсності є го вимірювача, Фіг.2 - блок-схема алгоритму пронестабільним. Це обумовлено тим, що результуюграми роботи мікро-ЕОМ вимірювача. чий коефіцієнт залежить від нестабільності Термошумовий вимірювач (Фіг.1) містить імпекоефіцієнта підсилення високочастотного дансний датчик 1 з досліджуваним опором, зразпідсилювача з великим коефіцієнтом підсилення, ковий резистор 2 з заданим опором, перемикач 3, нестабільності смуги його пропускання, а також один вхід якого з'єднаний з потенціальним затиснепостійності крутизни перетворення квадратичнокачем імпедансного датчика 1, другий вхід з'єднаго детектора, що впливає на точність ний з потенціальним затискачем зразкового резисвимірювання. тора 2, вихід перемикача 3 з'єднаний через В основу корисної моделі покладена задача інвертор 4 (ІН), паралельно якому включений ключ створити такий термошумовий вимірювач, в якому 5, з інверсним входом диференціального підсилювведення нових елементів і зв'язків дозволило б вача 6 (ДП), прямий вхід якого з'єднаний з вихозменшити вплив власних шумів елементів вимірюдом перемикача 3. До виходу диференціального вальної схеми і виключити вплив температурної та підсилювача 6 підключені послідовно з'єднані смучасової нестабільності коефіцієнта перетворення говий фільтр 7 (СФ), високочастотний підсилювач опору, що вимірюється, в напругу на результат 8 (ВП) і квадратичний детектор 9 (КД). Вихід квадвимірювання, що забезпечить підвищення точності ратичного детектора 9 з'єднаний зі входом вимірювання. інтегруючого аналого-цифрового перетворювача Поставлена задача вирішується тим, що в 10 (АЦП), цифровий вхід якого підключений до термошумовий вимірювач, що містить імпедансвхідного порту мікро-ЕОМ 11. До вихідних портів ний датчик, диференціальний підсилювач, та вимікро-ЕОМ підключені керуючі входи перемикача 3 сокочастотний підсилювач з'єднаний з квадратичі ключа 5, а також цифровий індикатор 12. ним детектором, згідно з корисною моделлю, Термошумовий вимірювач працює наступним додатково введені зразковий резистор, перемикач, чином. паралельно з'єднані між собою ключ і інвертор, Аналого-цифрова схема термошумового вимісмуговий фільтр, інтегруючий аналого-цифровий рювача працює з запам'ятовуванням результатів перетворювач і мікро-ЕОМ з цифровим індикатопроміжних вимірювань у відповідності з програмою ром, при цьому один з входів перемикача з'єдна(Фіг.2), яка записана в пам'яті мікро-ЕОМ. ний з потенціальним затискачем імпедансного В програму вводять необхідні значення зміндатчика, другий з'єднаний з потенціальним затисних R0, t і N (крок 2), де R0 - опір зразкового резикачем зразкового резистора, вихід перемикача стора, t - час усереднення, N - кількість проміжз'єднаний з прямим входом диференціального них вимірювань, які необхідні для їх усереднення. підсилювача та через інвертор з його інверсним Встановлюють початкові значення змінних: і - кільвходом, вихід диференціального підсилювача кість проміжних вимірювань (крок 3), j - початкове з'єднаний зі входом смугового фільтра, вихід якого (розімкнуте) положення ключа 5 (крок 4), p - початз'єднаний зі входом високочастотного підсилювакове (верхнє) положення перемикача 3 (крок 5). ча, вихід квадратичного детектора з'єднаний зі При початковому положенні перемикача 3 входом інтегруючого аналого-цифрового перетво(р=1) знімається шумова напруга Ux(t) з опору RX 5 16535 6 імпедансного датчика 1 (кроки 7 і 8). Напруга UX (t) 2 2 2 2 N1 k 2k 3S 4k1 U2 UB UФ / q N1 , (4) 2 X розгалужується на виході перемикача 3 на дві однакові шумові напруги U1(t)=U2(t)=UX(t). Одна з напруг U1(t) поступає на прямий вхід де U2 - середній квадрат шумової напруги X диференціального підсилювача 6, друга напруга (дисперсія) імпедансного датчика 1; U(t) змінює свою полярність за допомогою 2 2 UB i UФ - дисперсія власних шумів елементів інвертора 4 (крок 9). В результаті цього диференціальний підсилювач 6 підсилює не вимірювальної схеми; різницю, а суму двох однакових напруг U1(t) і U2(t). q - одиниця молодшого розряду аналогоЗазвичай сумарна напруга імпедансного датчика 1 цифрового перетворення; одного порядку з власними шумами N1 - випадкові похибки аналого-цифрового диференціального підсилювача 6. перетворення (при p = 1). Якщо шумову напругу UX(t) представити в Наступна серія кроків програми формується комплексному вигляді як UX , то вихідну напругу збільшенням змінної p на одиницю (крок 18). В результаті виконання умов вибору (кроки 6 і 19) диференціального підсилювача 6 при перемикач 3 по сигналу керування мікро-ЕОМ 11 розімкнутому ключі 5 можливо представити у переводиться в нижнє положення (крок 20). При вигляді суми комплексних шумових напруг: цьому на диференціальний підсилювач 6 починає U3 2k1UX UH UB , (1) поступати сумарна шумова напруга 2U0 зразкового де k1 - коефіцієнт підсилення диференціальнорезистора 2 (крок 21). На виході диференціального го підсилювача 6; підсилювача 6 утворюється сумарна шумова на пруга аналогічна виразу (1): UH - комплексна напруга низькочастотних U5 2k1U0 UH UB . (5) шумів; В результаті аналого-цифрового перетворення UB - комплексна напруга високочастотних напруги (кроки 9-17) в мікро-ЕОМ 11 шумів. запам'ятовується цифровий код аналогічний вираПідсилений сумарний інформаційний шум разу (4): зом з відповідними шумами диференціального підсилювача 6 (кроки 10 і 11) поступають на смуговий фільтр 7, де із адитивної суміші шумів (1) виділяється тільки високочастотний тепловий шум імпедансного датчика 1 і високочастотні шуми диференціального підсилювача 6 (крок 12). Ці шуми підсилюються високочастотним підсилювачем 8 (крок 13) і квадратично перетворюються в детекторі 9 (крок 14). Квадратована шумова напруга поступає на інтегруючий аналого-цифровий перетворювач 10, де усереднюється на заданому інтервалі часу t. Із усередненої напруги виділяється постійна складова напруги: U4 S k 3k 2 (2k1UX UB UФ 2 , (2) де k2 - коефіцієнт передачі смугового фільтра 7; k3 - коефіцієнт підсилення високочастотного підсилювача 8; S - крутизна перетворення квадратичного детектора 9; UФ - комплексна напруга шумів смугового фільтра 7 з урахуванням шумів високочастотного підсилювача 8. Постійна складова напруги в вигляді цифрового коду N1 зчитується з виходу інтегруючого аналого-цифрового перетворювача 10 (крок 15) і запам'ятовується в пам'яті мікро-ЕОМ 11 (крок 17). При визначенні коду N1 потрібно врахувати, що тепловий шум опору RX імпедансного датчика 1 і власні шуми елементів вимірювальної схеми між собою некорельовані. Тому їх усереднені добутки дорівнюють нулю: (3) U U 0, U U 0, U U 0. X B X Ф B Ф Із урахуванням умови (3) цифровий код має значення: N2 2 2 2 2 2 k 2k 3S 4k1 U0 UB UФ / q 2 N2 , (6) де N2 - випадкові похибки другого аналогоцифрового перетворення (при p=2). В результаті збільшення змінної p ще на одиницю (крок 18) і виконання умов вибору (кроки 6, 19) програма переходить на змінну у (крок 22). При збільшенні у на одиницю (крок 23) за сигналом мікро-ЕОМ 11 ключ 5 замикається і шунтується інвертор 4 (крок 24). На диференціальний підсилювач 6 починає діяти різниця двох однакових шумових напруг. Тому на виході диференціального підсилювача 6 будуть присутні тільки його власні шуми: U6 UH UB . (7) В результаті аналого-цифрового перетворення напруга власних шумів диференціального підсилювача 6 тими ж елементами вимірювальної схеми (кроки 11-15) формується третій цифровий код: N3 2 2 2 k 2k 3S UB UФ / q 2 N2 , (8) де N3 - випадкові похибки третього аналогоцифрового перетворення. По умові вибору (крок 16) код N3 запам'ятовується в пам'яті мікро-ЕОМ 11 за ознакою j (крок 26). При виконанні умови вибору (крок 22) ключ 5 за сигналом мікро-ЕОМ знову розмикається (крок 27). В подальшому, за умовою вибору (крок 28) програмою передбачено перехід на виконання команд за змінною і. Збільшенням змінної i на одиницю (крок 29) починаються повторні вимірювання шумових напруг і отримання усереднених значень кодів N1 , N2 і N3 (крок 30). За середніми значеннями кодів, в яких мінімі 7 16535 8 В мікро-ЕОМ 11 обчислюється за формулою зовані випадкові похибки N1, N2 і N3, обчислю(15) і виводиться на цифровий індикатор 12 знається відношення різницевих кодів (крок 31): чення активного опору (крок 32). При необхідності N1 N3 за умовою вибору (крок 33) повторюється процес Q (9) N2 N3 вимірювання або закінчується програма. Із виразів (10) та (15) видно, що кінцевий реПідставляючи в вираз (9) значення цифрових зультат вимірювання після обчислювальної оброкодів (4), (6) і (8), отримуємо: бки кодів проміжних вимірювань (N1, N2 і N3) не U2 X залежить ні від рівня власних шумів елементів Q (10) 2 вимірювальної схеми (UH, UB і UФ), ні від нестабіU0 льності коефіцієнтів перетворення елементів виДисперсія теплових шумів опору імпедансного мірювальної схеми (k1, k2, k3 i S). Зазначена датчика 1 визначається формулою Найквіста: незалежність забезпечує високу точність (11) вимірювання активного опору імпедансного датчиU2 4kT1 Re Z , X ка 1. де k - постійна Больцмана; Моделювання роботи елементів термошумоT1 термодинамічна температура вого вимірювача (Фіг.1) здійснювалось на персоімпедансного датчика 1; нальному комп'ютері за алгоритмом програми - смуга частот теплових флуктуацій, які ви(Фіг.2). діапазон вимірювання активних опорів діляються смуговим фільтром 7 вимірювальної приймався від 10 кОМ до 10 МОм при термодинасхеми; мічній температурі 300К. Інформаційний тепловий Re Z = RX - активна складова повного опору Z шум, який знімався з імпедансного датчика, модеімпедансного датчика 1. лювався білим шумом в смузі частот 0,5-1МГц з Дисперсія теплових шумів зразкового резистоспектральною густиною напруги 10-15- 10-17 В2/Гц. ра 2 визначається його омічним опором R0: Результати моделювання підтвердили метро2 (12) U0 4kT2 R0 , логічну надійність термошумового вимірювача активного опору при відношенні інформаційний де T2 - термодинамічна температура зразковошум - власні шуми вимірювача в діапазоні значень го резистора 2. від 0,1 до 5 та відносній нестабільності коефіцієнЯкщо підставити значення дисперсій (11) і (12) тів перетворення елементів схеми до ±30%. Час в вираз (10), то отримаємо: усереднення t змінювався в межах від 1 до 5с. T1 Re Z R XT1 . Q (13) При цьому відносна випадкова похибка T1R0 R0T2 вимірювання змінювалась в межах від ±0,4 до Зазвичай зразковий резистор 2 розміщують в ±0,01% в залежності від часу усереднення шумотепловому контакті з імпедансним датчиком 1. вих напруг. При збільшенні часу усереднення до Тоді при T1=T2 маємо вираз: хвилини випадкову похибку можливо знизити до RX ±0,001%. Але при цьому суттєво зростає . Q (14) інерційність вимірювача. Завдяки вимірюванням R0 активної складової повного опору кондуктометІз співвідношення (14) нарешті отримуємо знаричного датчика похибка вимірювання залишкової чення активного опору імпедансного датчика 1: вологості деревини понизилась в 5-7 разів. R X QR 0 . (15) 9 Комп’ютерна верстка Л. Купенко 16535 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюThermal noise meter
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Kalameiets Tetiana Petrivna
Назва патенту російськоюИзмеритель теплового шума
Автори російськоюСкрипник Юрий Алексеевич, Каламеец Татьяна Петровна
МПК / Мітки
МПК: G01N 27/04
Мітки: термошумовий, вимірювач
Код посилання
<a href="https://ua.patents.su/5-16535-termoshumovijj-vimiryuvach.html" target="_blank" rel="follow" title="База патентів України">Термошумовий вимірювач</a>
Калориметричний вимірювач надвисокочастотної потужності
Номер патенту: 64829
Опубліковано: 15.03.2004
Автори: Іващенко Володимир Олексійович, Юрчик Генадій Васильович, Яненко Олексій Пилипович, Скрипник Юрій Олексійович
МПК: G01R 21/02
Мітки: потужності, надвисокочастотної, вимірювач, калориметричний
Формула / Реферат:
Калориметричний вимірювач надвисокочастотної потужності, до складу якого входить відрізок хвилеводу, у якому розміщені сухе навантаження і калориметрична насадка, на якій розташована індикаторна термобатарея, нормуючий підсилювач постійної напруги та індикатор, який відрізняється тим, що в нього введено два автоматичних двополюсних перемикачі, вхід першого з яких з'єднаний з вільними кінцями термобатареї, а перший його вихід - з входом...
Термошумовий спосіб вимірювання опорів високоомних об’єктів
Номер патенту: 14264
Опубліковано: 15.05.2006
Автори: Каламєєць Тетяна Петрівна, Курко Володимир Романович, Скрипник Юрій Олексійович
МПК: G01R 27/00
Мітки: опорів, термошумовий, вимірювання, спосіб, високоомних, об'єктів
Формула / Реферат:
Термошумовий спосіб вимірювання опорів високоомних об'єктів, при якому з досліджуваного об'єкта знімають шумову напругу, вимірюють постійну напругу, за значенням якої визначають опір досліджуваного об'єкта, який відрізняється тим, що шумову напругу розгалужують на дві напруги, одну з яких періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану напругу, яку підсилюють в смузі...
Термошумовий пристрій для вимірювання температури
Номер патенту: 48268
Опубліковано: 15.08.2002
Автори: Маковська Вікторія Юріївна, Скрипник Юрій Олексійович
МПК: G01K 7/30
Мітки: температури, пристрій, термошумовий, вимірювання
Формула / Реферат:
1. Термошумовий пристрій для вимірювання температури, який складається з двох підвищувальних трансформаторів, вторинні обмотки яких з'єднані послідовно, а їх середня точка заземлена, двох підсилювачів, входи яких з'єднані з потенціальними кінцями вторинних обмоток підвищувальних трансформаторів, суматора, перший вхід якого з'єднаний з виходом одного підсилювача, а другий вхід суматора через автоматичний перемикач та інвертуючий трансформатор...
Цифровий вимірювач температури
Номер патенту: 72042
Опубліковано: 17.01.2005
Автор: Хорошок Сергій Вікторович
МПК: G01K 7/00
Мітки: температури, цифровий, вимірювач
Формула / Реферат:
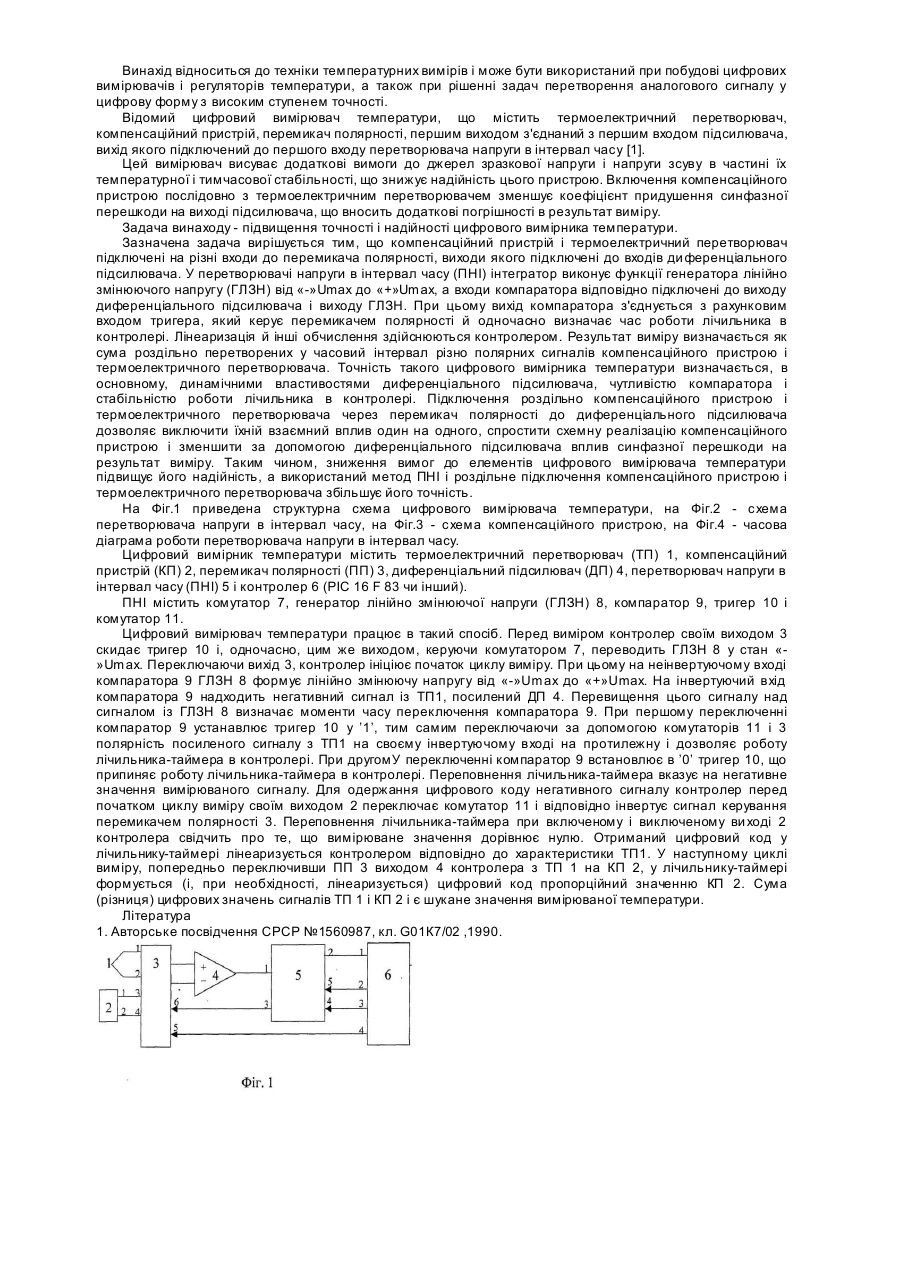
1. Цифровий вимірювач температури, що містить термоелектричний перетворювач, компенсаційний пристрій та перемикач полярності, першим виходом з'єднаний з першим входом диференціального підсилювача, вихід якого підключений до першого входу перетворювача напруги в інтервал часу, який відрізняється тим, що термоелектричний перетворювач підключений до першого і другого, а компенсаційний пристрій - до третього і четвертого входів перемикача...
Багатоканальний безконтактний вимірювач постійних струмів
Номер патенту: 45150
Опубліковано: 15.03.2002
Автори: Кошовий Олег Миколайович, Лозович Юлія Олександрівна, Кошовий Микола Дмитрович, Куст Сергій Михайлович
МПК: G01R 19/00
Мітки: безконтактний, вимірювач, багатоканальний, струмів, постійних
Формула / Реферат:
Багатоканальний безконтактний вимірювач постійних струмів, що складається з вимірювального датчика, здатного охоплювати провідник із струмом, операційного підсилювача, пристрою відображення інформації, який відрізняється тим, що в нього введено аналого-цифровий перетворювач, який своїм входом під'єднаний до операційного підсилювача, а виходом - до пристрою відображення інформації та запам'ятовуючого пристрою, який, в свою чергу, з'єднаний з...
Попередній патент: Механізм накатування полотна круглов’язальної машини
Наступний патент: Ланцюгова передача
Випадковий патент: Фармацевтичний препарат антитромботичної дії