Трьохосний гіростабілізатор кіно-телекамери
Номер патенту: 22368
Опубліковано: 03.03.1998

Формула / Реферат
Трехосный гиростабилизатор кино- телекамеры, содержащий платформу в кардановом подвесе, состоящем из наружной и внутренней рам, оси подвеса которых и ось подвеса платформы взаимоортогональны, два трехстепенных гироскопа, имеющие датчики угла и момента по каждой из осей чувствительности, причем первый гироскоп установлен на внутренней раме, а второй на платформе, систему трехосной стабилизации по осям подвеса платформы, внутренней и наружной рам, включающую датчики угла на осях чувствительности гироскопов, каждый из которых последовательно соединен с усилителем-преобразователем и приводом на оси подвеса, параллельной оси чувствительности гироскопа, систему горизонтальной коррекции и ручку управления горизонтальной панорамой, отличающий-с я тем, что в него введены три акселерометра, ручка управления вертикальной панорамой, датчик угла на оси подвеса платформы, два фильтра низких и один фильтр высоких частот, первый и второй вычислительные блоки, первый и второй сумматоры, интегратор, причем первый гироскоп установлен так, что его первая ось чувствительности параллельна оси подвеса внутренней рамы, а вторая - оси подвеса наружной рамы, второй гироскоп установлен так, что его первая ось чувствительности параллельна оси подвеса платформы, а вторая перпендикулярна этой оси, акселерометры установлены на платформе так, что их оси чувствительности взаимоортогональны и параллельны осям подвеса платформы, внутренней и наружной рам, при этом акселерометр, ось чувствительности которого параллельна оси подвеса платформы, первый сумматор и датчик момента на второй оси чувствительности первого гироскопа соединены последовательно, а выходы двух других акселерометров подключены через фильтры низких частот ко входам первого вычислительного блока, выход которого через второй сумматор связан с первым входом второго вычислительного блока, первый выход которого подсоединен к датчику момента первой оси чувствительности первого гироскопа, а второй - ко второму входу первого сумматора, ручка управления вертикальной панорамой соединена с датчиком момента второй оси чувствительности второго гироскопа и через последовательно соединенные интегратор и фильтр высоких частот связана со вторым входом второго сумматора, ручка управления горизонтальной панорамой подключена ко второму входу второго вычислительного блока, причем, внутренняя рама выполнена в виде вилки, а наружная - в виде полувилки.
Текст
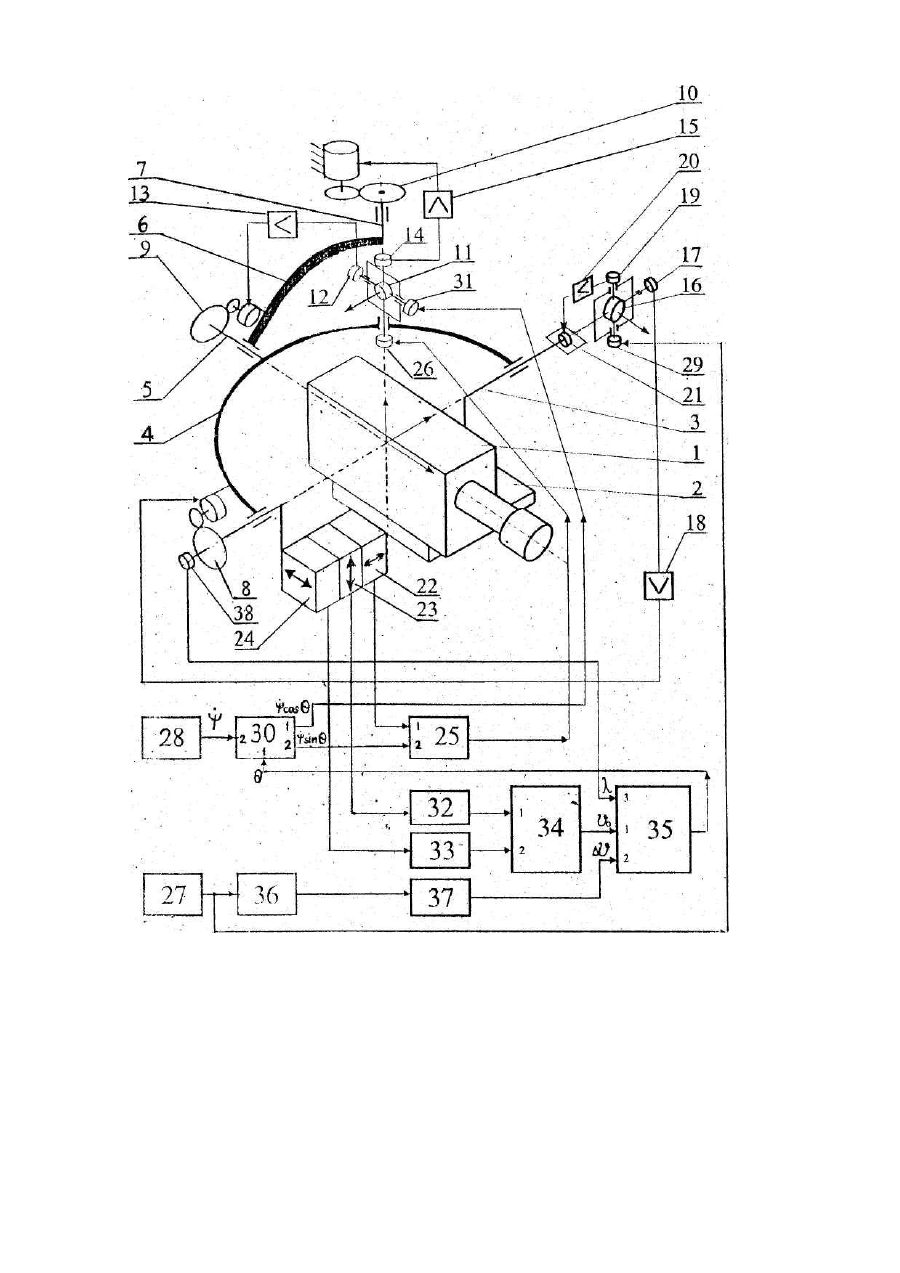
Предполагаемое изобретение относится к области приборостроения, а именно к управляемым гироскопическим стабилизаторам углового положения оптических приборов, применяемых при кинотелесъемке с борта различных подвижных носителей (вертолетов, автомобилей, судов, кранов и т.п.). Наиболее близким решением по технической сущности является "Трехосный гиростабилизатор киноаппарата" [Авт.св. СССР № 979855, кл. G 01 С 21/18. 1982]. содержащий платформу в наружном кардановом подвесе, два трехстепенных гироскопа, первый из которых установлен на внутренней раме так, что одна из его осей чувствительности параллельна продольной оси киноаппарата, другая - вертикальной его оси, второй гироскоп установлен на внутренней раме карданова подвеса. На платформе установлен физический маятник, ось вращения которого параллельна поперечной оси киноаппарата, а на маятнике установлен жидкостный маятник таким образом, что его ось чувствительности параллельна продольной оси киноаппарата. На оси вращения физического маятника установлены два синусно-косинусных вращающихся трансформатора, один из которых используется для раскладки угловой скорости управления горизонтальной панорамой на датчики момента первого гироскопа, другой - для раскладки сигнала горизонтальной коррекции на эти датчики момента. Таким образом достигается возможность управления горизонтальной панорамой киноаппарата вокруг кажущейся вертикали, моделируемой физическим маятником, в широком диапазоне углов вертикальной плоскости. Приведенный выше трехосный гиростабилизатор имеет следующие недостатки: 1. Колебание изображения, получаемого киноаппаратом, вокруг его продольной оси с частотой собственных колебаний физического маятника и амплитудой, пропорциональной скорости горизонтальной панорамы. Указанное обстоятельство особенно сильно снижает качество изображения с подвижных носителей и при высоких скоростях горизонтальной панорамы, получивших в настоящее время широкое применение на съемках. 2. Значительные отклонения горизонтальной стороны получаемого кадра относительно линии горизонта, поскольку направление кажущегося ускорения вместе установки маятника на платформе очень существенно отличается от направления истинной вертикали как в силу движений носителя, так и в силу неизбежных смещений маятника относительно центра вращения платформы и необходимости динамичного управления ее движением. Указанное отличие направлений вызывает существенную угловую скорость движения киноаппарата вокруг оси, лежащей в горизонтальной плоскости при проведении горизонтальных панорам, что и вызывает горизонтальность получаемого кадра. 3. Высокую сложность механического узла, содержащего двойной маятник и два синусно-косинусных трансформатора и его электронного обеспечения. В основу изобретения поставлена задача такого трехосного гиростабилизатора кино- телекамеры, в котором введение трех акселерометров, ручки управления вертикальной панорамой, датчика угла на оси подвеса платформы; двух фильтров низких и одного фильтра высоких частот, первого и второго вычислительных блоков, первого и второго сумматоров, интегратора, установление первого гироскопа таким образом, что его первая ось чувствительности параллельна оси подвеса внутренней рамы, а вторая -оси подвеса наружной рамы, установление второго гироскопа таким образом, что его первая ось чувствительности параллельна оси подвеса платформы, а вторая перпендикулярна этой оси, установление акселерометров на платформе таким образом, что их оси чувствительности взаимоортогональны и параллельны оси подвеса платформы, внутренней и наружной рам, акселерометр, ось чувствительности которого параллельна оси подвеса платформы, первый сумматор и датчик момента на второй оси чувствительности первого гироскопа соединены последовательно, а выходы двух других акселерометров подключены через фильтры низких частот ко входам первого вычислительного блока, выход которого через второй сумматор связан с первым входом второго вычислительного блока, первый выход которого подсоединен к датчику момента первой оси чувствительности первого гироскопа, а второй ко второму входу первого сумматора, ручка управления вертикальной панорамой соединена с датчиком момента второй оси чувствительности второго гироскопа и через последовательно соединенный интегратор и фильтр высоких частот связана со вторым входом второго сумматора, ручка управления горизонтальной панорамой подключена ко второму входу второго вычислительного блока, причем, внутренняя рама выполнена в виде вилки, а наружная в виде полувилки обеспечивают повышение точности угловой стабилизации камеры, повышение точности стабилизации камеры, повышение точности обеспечения горизонтальности получаемого изображения, упрощение конструкции и повышение надежности гиростабилиззтора, а также улучшение доступа к кино- телекамере, что создает возможность управления горизонтальной панорамой вокруг вертикали вне зависимости от динамики управления камерой и движений носителя. Поставленная задача достигается использованием в трехосном гиростабилизаторе кино- телекамеры доотличительных признаков: платформа в кардановом подвесе, состоящая из наружной и внутренней рам, оси подвеса которых и ось подвеса платформы взаимоортогональны, два трехосных гироскопа, имеющие датчики угла и момента по каждой из осей чувствительности, причем первый гироскоп установлен на внутренней раме, а второй на платформе, система трехосной стабилизации по осям подвеса платформы, внутренняя и наружная рамы, включающие датчики угла на осях чувствительности гироскопов, каждый из которых последовательно соединен с усилителем-преобразователем и приводом на оси подвеса, параллельной оси чувствительности гироскопа, система горизонтальной коррекции и ручка управления горизонтальной панорамой, и следующих отличительных признаков: введено три акселерометра, ручка управления вертикальной панорамой, датчик угла на оси подвеса платформы, два фильтра низких и один фильтр высоких частот, первый и второй вычислительные блоки, первый и второй сумматоры, интегратор, первый гироскоп установлен так, что его первая ось чувствительности параллельна оси подвеса внутренней рамы, а вторая - оси подвеса наружной рамы, второй гироскоп установлен так, что его ось чувствительности параллельна оси подвеса . платформы, а вторая перпендикулярна этой оси, акселерометры установлены на платформы так, что их оси чувствительности взаимоортогональны и параллельны осям подвеса платформы, внутренняя и наружная рамы, акселерометр, ось чувствительности которого параллельна оси подвеса платформы, первый сумматор и датчик момента на второй оси чувствительности первого гироскопа соединены последовательно, а выходы двух других акселерометров подключены через фильтры низких частот ко входам первого вычислительного блока, выход которого через второй сумматор связан с первым входом второго вычислительного блока, первый выход которого подсоединен к датчику момента первой оси чувствительности первого гироскопа, а второй ко второму входу первого сумматора, ручка управления вертикальной панорамой соединена с датчиком момента второй оси чувствительности второго гироскопа и через последовательно соединенный интегратор и фильтр высоких частот связана со вторым входом второго сумматора, ручка управления горизонтальной панорамой подключена ко второму входу второго вычислительного блока, внутренняя рама выполнена в. виде вилки, а наружная в виде полувилки. Благодаря использованию в предложенном трехосном гиростабилизаторе кино- телекамеры трех акселерометров, ручки управления вертикальной панорамой, датчика угла на оси подвеса платформы, двух фильтров низких и одного фильтра высоких частот, первого и второго вычислительных блоков, первого и второго сумматоров, интегратора, установке первого гироскопа таким образом, что его первая ось чувствительности параллельна оси подвеса внутренней рамы, вторая - оси подвеса наружной рамы, установке второго гироскопа таким образом, что его первая ось чувствительности параллельна оси подвеса платформы, а вторая перпендикулярна этой оси, установке акселерометров на платформе таким образом, что их оси чувствительности взаимоортогональны и параллельны осям подвеса платформы, внутренней и наружной рам, последовательному соединению акселерометра, ось чувствительности которого параллельна ори подвеса платформы, первого сумматора и датчика момента на второй оси чувствительности первого гироскопа, подключению выходов двух других акселерометров через фильтры низких частот ко входам первого вычислительного блока, выход которого через второй сумматор . связан с первым входом второго вычисли-. тельного блока, первый выход которого подсоединен к датчику момента первой оси чувствительности первого гироскопа, а второй ко второму входу первого сумматора, соединению ручки управления вертикальной панорамой с датчиком момента второй оси чувствительности второго гироскопа и через последовательно соединенные интегратор и фильтр высоких частот связана со вторым входом второго сумматора, подключению ручки управления горизонтальной панорамой ко второму входу второго вычислительного блока и внутренней раме, выполненной а виде вилки, а наружной в виде полувилки. На чертеже представлены кинематическая схема трехосного гиростабилизатора кино- телекамеры и структурная схема систем управления и стабилизации. Гиростабилизатор содержит кино- телекамеру 1, установленную на платформе 2, подвешенную в кардановом подвесе, который имеет ось подвеса платформы 3, внутреннюю раму 4 выполненную в виде вилки, с осью подвеса внутренней рамы 5, наружную раму 6, выполненную в виде полувилки с осью подвеса наружной рамы 7. В исходном положении, указанные оси взаимоортогональны, оптическая ось кинотелекамеры 1 параллельна оси подвеса внутренней рамы 5, а горизонтальная сторона получаемого кадра параллельна оси подвеса платформы 3. На осях карданового подвеса установлены: привод платформы 8, привод внутренней рамы 9, привод наружной рамы 10. Чувствительными элементами системы стабилизации являются два трехстепенных гироскопа. Первый гироскоп 11 установлен на внутренней раме 4 так, что первая его ось чувствительности параллельна оси подвеса внутренней рамы 4. На указанной оси гироскопа установлен датчик угла первой оси чувствительности первого гироскопа 12, выход которого через усилительпреобразователь 13 связан с приводом внутренней рамы 9, образуя первый контур стабилизации. Вторая ось чувствительности этого гироскопа параллельна оси подвеса наружной рамы 7. На этой оси гироскопа установлен датчик угла второй оси чувствительности первого гироскопа 14, выход которого через усилительпреобразователь 15 связан со входом привода наружной рамы 10, образуя второй контур стабилизации. Второй гироскоп 16 установлен на платформе 2 так, что первая его ось чувствительности параллельна оси подвеса платформы 3. На этой оси гироскопа установлен датчик угла первой оси чувствительности второго гироскопа 17, выход которого через усилитель-преобразователь 18 связан с приводом платформы 8, образуя третий контур стабилизации. Датчик угла второй оси чувствительности второго гироскопа 19 через усилитель 20 связан со входом датчика момента первой оси чувствительности второго гироскопа 21, образуя контур межрамочной коррекции, обеспечивающий перпендикулярность вектора кинетического момента этого гироскопа первой оси чувствительности. На платформе 2 закреплен блок из трех акселерометров с взаимоортогональным расположением осей чувствительности так, что ось чувствительности первого акселерометра 22 параллельна оси подвеса платформы 3, второго акселерометра 23 - оси подвеса наружной рамы 7, третьего акселерометра 24 - оси подвеса внутренней рамы 5. Выход первого акселерометра 22 связан с первым входом первого сумматора 25, выход которого связан с датчиком момента второй оси чувствительности первого гироскопа 26. образуя систему горизонтальной коррекции. Управление движением теле- кинокамеры 1 осуществляется с пульта управления с помощью ручки управления вертикальной панорамой 27 и ручки управления горизонтальной панорамой 28, поступающий через усилитель-преобразователь 13 на привод внутренней рамы 9, компенсирующий указанную составляющую возмущающего момента. Второй контур стабилизации работает следующим образом. Под действием составляющей возмущающего момента внешних сил, направленный вокруг оси подвеса наружной рамы 7, эта рама вместе с кино- телекамерой 1 поворачивается, датчик угла второй оси чувствительности первого гироскопа 14 формирует сигнал, поступающий через усилитель-преобразователь 15 на привод наружной рамы 10, компенсирующий указанную составляющую возмущающего момента. Третий контур стабилизации работает следующим образом. Под действием составляющей возмущающего момента внешних сил, направленной вокруг оси подвеса платформы 3, кино- телекамера 1 поворачивается, датчик угла первой оси чувствительности второго гироскопа 17 формирует сигнал, поступающий через усилитель-преобразователь 18, на привод платформы 8, компенсирующий указанную составляющую возмущающего момента. Система горизонтальной коррекции работает следующим образом. При отклонении платформы 2 от горизонтального положения вокруг оси подвеса внутренней рамы 5, первый акселерометр 22 формирует сигнал, поступающий через первый сумматор 25 на датчик момента второй оси чувствительности первого гироскопа 26, вызывающий его прецессию, коррекцию положения системы координат, модулируемой гироскопом 11 и, соответственно коррекцию углового положения платформы 2 вокруг оси подвеса внутренней рамы 5 в сторону, противоположную первоначальному отклонению. Управление вертикальной панорамой кино- телекамеры 1 осуществляется с помощью ручки управления этой панорамы 27, сигнал с которой поступает на датчик момента второй оси чувствительности второго гироскопа 29, вызывая движение системы координат, модулируемой гироскопом 16 и, соответственно движение кино- телекамеры 1 вокруг оси подвеса платформы 3. Управление горизонтальной панорамой кино- телекамеры 1 осуществляется с помощью ручки управления этой панорамы 28, сигнал с которой y поступает на второй вход второго вычислительного блока 30, в котором он умножается на синус угла наклона внутренней рамы 4 относительно истинной вертикали =×= вокруг оси подвеса платформы 3 и поступает на второй выход вычислительного блока30. Одновременно, в этом же блоке сигнал y умножается на косинус угла Q и поступает на первый выход этого блока. Таким образом, на выходах второго вычислительного блока формируются проекции вектора заданной угловой скорости y на оси чувствительности первого гироскопа 11, не отклоняющегося при вертикальной панораме. Со второго выхода второго вычислительного блока 30 сигнал y sinQ через первый сумматор подается на датчик момента, второй очи чувствительности первого гироскопа 26, а с первого выхода второго вычислительного блока 30 сигнал y cos Q поступает на датчик момента первой оси чувствительности первого гироскопа 31. Сигнал Q, равный углу наклона внутренней рамы 4 относительно истинной вертикали вокруг оси подвеса платформы 3 формируется на выходе второго сумматора 35 по алгоритму: где V0 - низкочастотная составляющая угла отклонения платформы от кажущейся вертикали; Dv-высокочастотная составляющая угла отклонения платформы от произвольного направления (в данном случае удобно выбрать направление истинной вертикали) вокруг оси подвеса платформы 3; l - угол отклонения внутренней рамы 4 относительно платформы. Сигнал l поступает на третий вход второго сумматора 35 с выхода датчика угла на оси подвеса платформы 38. Сигнал v0 поступает с выхода первого вычислительного блока, определяющего этот угол по соотношению низкочастотных составляющих, равных проекциям вектора кажущегося ускорения на оси чувствительности второго 23 и третьего 24 акселерометров по любому известному алгоритму, например: где a23 и a24 - сигналы соответствующих акселерометров, прошедшие через фильтры низких частот 32 и 33. Сигнал является высокочастотной составляющей интеграла угловой скорости вертикальной панорамы и поступает на второй вход второго сумматора 35 с ручки управления вертикальной панорамой 27 через последовательно соединенные интеграл 36 и фильтр высоких частот 37. Постоянная времени этого фильтра и фильтров низких част тот 32 и 33 одинаковы, что, в частности позволяет считать сумму углов vo+ Dv достаточно точной моделью отклонения платформы 3 от истинной вертикали, на которую пренебрежимо мало влияние колебаний вектора кажущегося ускорения, дрейфы нуля ручки управления 27 и интегратора 36. Контур межрамочной коррекции необходим для обеспечения работоспособности второго гироскопа 16 и работает следующим образом. При отклонении платформы 3 вокруг второй оси чувствительности второготи-. роскопа датчик угла 19 формирует сигнал, который через усилитель 20 подается на датчик момента 21, вызывая прецессию этого гироскопа в сторону уменьшения угла между гироскопом 16 и платформой 3.
ДивитисяДодаткова інформація
Автори англійськоюKokush Anatolii Yakymovych
Автори російськоюКокуш Анатолий Акимович
МПК / Мітки
МПК: G01C 21/10
Мітки: гіростабілізатор, трьохосний, кіно-телекамери
Код посилання
<a href="https://ua.patents.su/4-22368-trokhosnijj-girostabilizator-kino-telekameri.html" target="_blank" rel="follow" title="База патентів України">Трьохосний гіростабілізатор кіно-телекамери</a>
Гірокомпас

Номер патенту: 843
Опубліковано: 15.12.1993
Автори: Андрущик Володимир Петрович, Аврутов Вадим Вікторович, Збруцький Олександр Васильович, Старицький Лев Павлович, Дєдок Ігор Олексійович, Шемелін Анатолій Валентинович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий платформу в кардановом подвесе, динамически настраиваемый гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, расположенные на платформе, два двигателя стабилизации, установленные по осям карданова подвеса, датчик курса, два блока формирования сигнала стабилизации и блок формирования управляющих и корректирующих сигналов, при этом ось чувствительности акселерометра параллельна главной оси...
Гірокомпас

Номер патенту: 19719
Опубліковано: 25.12.1997
Автори: Шемелін Анатолій Валентинович, Дедок Ігорь Алєксєєвіч, Аврутов Вадим Вікторович, Збруцький Олександр Васильович, Старицький Лев Павлович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий корпус с установленным на платформе в кардановом подвесе динамически настраиваемым гироскопом с двумя датчиками угла и двумя датчиками момента, датчик наклона платформы относительно ее горизонтальной оси вращения и термодатчик, расположенные на платформе, третий и четвертый датчики момента, установленные по осям карданова подвеса платформы и третий датчик угла, установленный на вертикальной оси карданова подвеса, два...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Дяченко Олег Миколайович, Журавель Олександр Павлович
МПК: G06F 11/00
Мітки: багатоканальний, аналізатор, сигнатурний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Пристрій для вимірювання несиметрії напруг
Номер патенту: 6523
Опубліковано: 29.12.1994
Автори: Майєр Віктор Якович, Мащенко Олександр Якович
МПК: G01R 29/00
Мітки: несиметрії, вимірювання, пристрій, напруг
Формула / Реферат:
(57) Устройство для измерения несимметрии напряжений, содержащее последовательно соединенные входной блок, первый фильтр симметричных составляющих обратной последовательности и первый избирательный усилитель, последовательно соединенные первый детектор, первый аналого-цифровой преобразователь и первый отсчетный блок, а также шунт и фазометр, причем выход первого избирательного усилителя соединен с входом первого детектора и первым входом...
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Кривущенко Микола Тимофійович, Дубінін Сергій Васильович, Сидоренко Іван Тимофійович, Мальцев Леонід Єгорович, Гринь Костянтин Афанасійович
МПК: E21C 35/24
Мітки: управління, привода, пристрій, електромагнітної, гірничої, тиристорний, машини, муфти, захисту
Формула / Реферат:
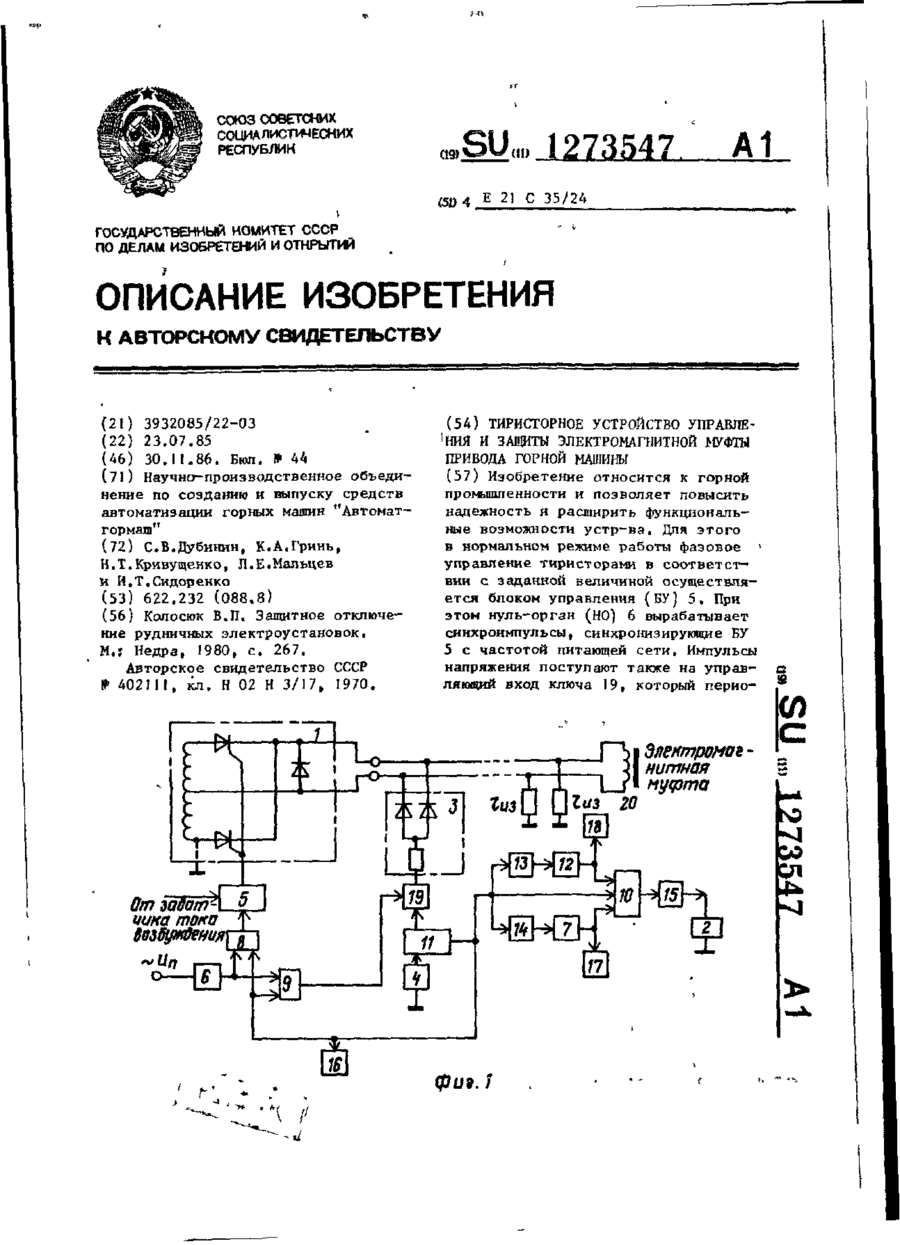
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Попередній патент: Інтегрувальний пристрій для заміру кількості твердої фази у димових газах електростанцій
Наступний патент: Пристрій корекції амплітуд імпульсів
Випадковий патент: Спосіб дистанційного керування виконавчим механізмом