Гірокомпас
Номер патенту: 19719
Опубліковано: 25.12.1997
Автори: Збруцький Олександр Васильович, Шемелін Анатолій Валентинович, Аврутов Вадим Вікторович, Дедок Ігорь Алєксєєвіч, Старицький Лев Павлович

Формула / Реферат
Гирокомпас, содержащий корпус с установленным на платформе в кардановом подвесе динамически настраиваемым гироскопом с двумя датчиками угла и двумя датчиками момента, датчик наклона платформы относительно ее горизонтальной оси вращения и термодатчик, расположенные на платформе, третий и четвертый датчики момента, установленные по осям карданова подвеса платформы и третий датчик угла, установленный на вертикальной оси карданова подвеса, два усилителя и вычислитель, при этом выходы первого и второго датчиков угла гироскопа соединены через соответствующие усилители с третьим и четвертым датчиками момента, выход датчика наклона платформы соединен с первым входом вычислителя, с третьим входом которого соединен выход третьего датчика угла, четвертый и пятый входы вычислителя соединены с источниками сигналов о широте места и скорости объекта, а выходы вычислителя соединены с первым и вторым датчиками момента гироскопа, отличающийся тем, что в вычислитель введен формирователь сигнала термокомпенсации, при этом выход термодатчика соединен со входом формирователя сигнала термокомпенсацим, который является вторым входом вычислителя.
Текст
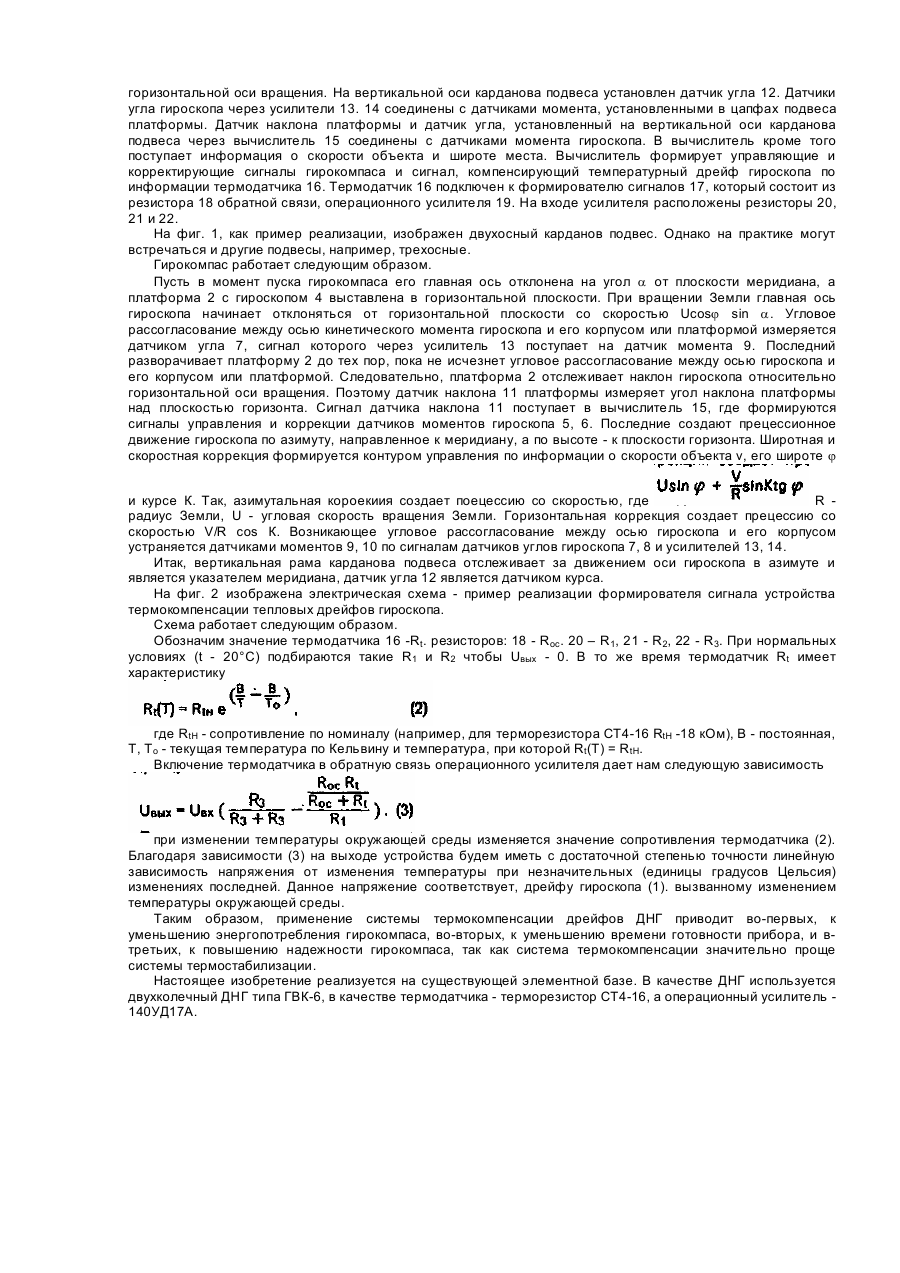
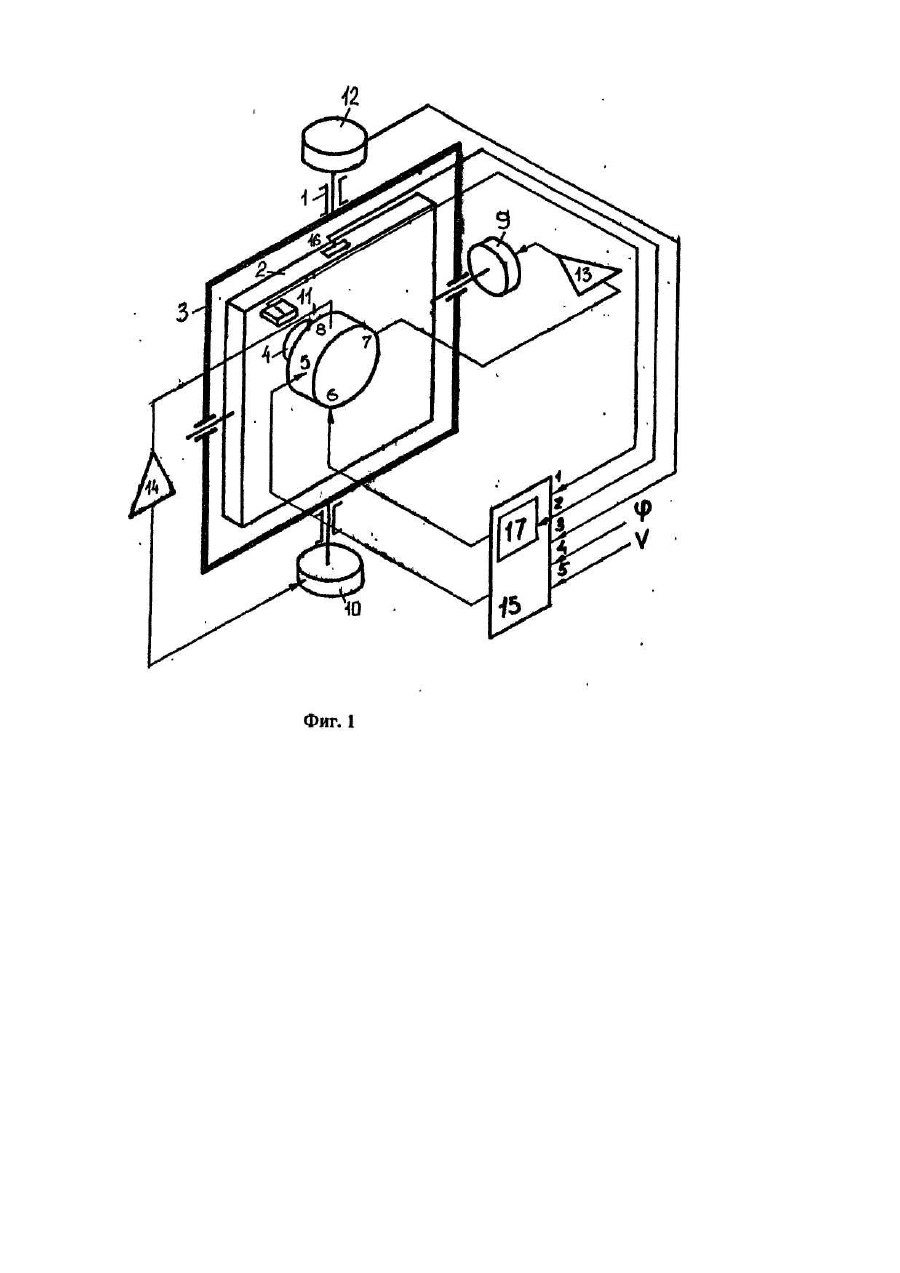
Изобретение относится к морскому приборостроению и может использоваться в системах навигации подвижных объектов для определения курса. Наиболее близким по технической сущности является гирокомпас Robertson SKR-80, построенный на индикаторном гиростабилизаторе, использующем динамически настраиваемый гироскоп. Чувствительный элемент данного прибора расположен на платформе с двухосным кар-дановым подвесом, стабилизируемым датчиками моментов, расположенными в цапфах кардановых рам, по сигналам датчиков углов динамически настраиваемого гироскопа (ДНГ). Управление положением ротора гироскопа осуществляется датчиками моментов ДНГ по сигналам двух акселерометров, расположенных взаимно перпендикулярно на платформе, и внешней информации о скорости, широте и текущем курсе объекта, Первый акселерометр, аналог индикатора горизонта у гирокомпаса с жидкостно-торсионным подвесом чувствительного элемента, расположен так, что его ось чувствительности параллельна главной оси гироскопа. Второй акселерометр является датчиком угла наклона платформы вокруг оси вращения ротора ДНГ. Недостатком этого гирокомпаса является наличие системы термостабилизации гироскопа, которая приводит к увеличению потребляемой мощности. Задача изобретения состоит в том, чтобы уменьшить потребляемую мощность, время готовности прибора и габариты гирокомпаса за счет введения устройства термокомпенсации. Поставленная задача решается тем, что в гирокомпасе, содержащем корпус с установленным на платформе в кардановом подвесе динамически настраиваемым гироскопом с двумя датчиками угла и двумя датчиками момента, датчик наклона платформы относительно ее горизонтальной оси вращения и термодатчик, расположенные на платформе, третий и четвертый датчики момента, установленные по осям карданова подвеса платформы и третий датчик угла, установленный на вертикальной оси карданова подвеса, два усилителя и вычислитель, при этом выходы первого и второго датчиков угла гироскопа соединены через соответствующие усилители с третьим и четвертым датчиками момента, выход датчика наклона платформы соединен с первым входом вычислителя, с третьим входом которого соединен выход третьего датчика угла, четвертый и пятый входы вычислителя соединены с источниками сигналов о широте места и скорости объекта, а выходы вычислителя соединены с первым и вторым датчиками момента гироскопа, согласно изобретению в вычислитель введен формирователь сигнала термокомпенсации, при этом выход термодатчика соединен со входом формирователя сигнала термокомпенсации, который является, вторым входом вычислителя. Эффективный отвод тепла от гироскопа с наружным кардановым подвесом представляет собой нелегкую инженерную задачу. В гироскопе с упругим вращающимся подвесом, где все тепловыделяющие элементы монтируются непосредственно на корпусной детали, его собственный перегрев в рабочем режиме оказывается очень небольшим. Слабый перегрев и незначительные температурные градиенты сами по себе являются благоприятными с точки зрения точности гироскопа факторами. Однако, рабочая температура прибора выбирается выше максимально возможной температуры окружающей среды, чтобы обеспечить однозначные условия работы без использования сложных активных охлаждающих устройств. В этом случае прогрев до рабочей температуры производится с помощью системы терморегулирования, включающей в себя датчик температуры и нагревательные элементы, установленные на гироскопе.. Сравнительно небольшая теплоемкость малогабаритного гироскопа с упругим вращающимся подвесом и хорошая теплопроводность деталей его конструкции позволяют с помощью нагревателей умеренной мощности (до 100 Вт) разогреть прибор от комнатной температуры до 60-70°С за несколько минут. В случаях когда по условиям эксплуатации затраты энергии на разогрев гироприбора и поддержание его рабочей температуры нежелательны, можно идти по пути измерения температуры гироскопа и ввода поправок на температурные зависимости его точностных параметров. Известно, что тепловые процессы описываются дифференциальными управлениями первого порядка, решения которых представляют собой экспоненциальные выражения. Исследуем, в качестве примера, уход гироскопа, вызванный осевой разбалансировкой ротора. Допустим, что в начальный момент температура снаружи и внутри гироскопа равна t1°C. При этом плечо силы Ρ или величина осевой разбалансировки ротора равна а, а дрейф гироскопа . Пусть окружающая температураизменилась и стала t2oC(t2>t1). После того, как весь гироскоп прогреется до температуры t2°C, плечо а изменится на величину Dа =aa(t2-t1), где a - коэффициент линейного расширения материала ротора. Переходный процесс изменения плеча от а до а происходит по закону Dат =Dа(1 –e-t/T) где постоянная времени Τ зависит от теплофизических характеристик прибора. Умножив Dат на Ρ и разделив на Н, получим закон теплового ухода Выражение (1) описывает большинство наблюдаемых выходов на тепловой режим как самих ДНГ, так и систем на их основе. Стабильность теплового дрейфа (1) позволяет учитывать его в вычислителе гиросистемы с ДНГ с учетом текущей температуры, которая измеряется термодатчиком на корпусе ДНГ. Итак, введение термокомпенсации дрейфов гироскопа, зависящих от температуры окружающей среды, устраняет необходимость наличия системы термостабилизации гиро-блока, приводит к уменьшению потребляемой мощности гирокомпаса и уменьшению его габаритов, Сущность изобретения поясняется принципиальной схемой гирокомпаса на фиг. 1. Гирокомпас содержит корпус 1 с установленным на платформе 2 в кардановом подвесе 3 динамически настраиваемым гироскопом 4 с датчиками момента 5. 6 и датчиками угла 7. 8. В цапфах подвеса платформы установлены датчики момента 9. 10. На платформе размещен датчик наклона 11 относительно ее горизонтальной оси вращения. На вертикальной оси карданова подвеса установлен датчик угла 12. Датчики угла гироскопа через усилители 13. 14 соединены с датчиками момента, установленными в цапфах подвеса платформы. Датчик наклона платформы и датчик угла, установленный на вертикальной оси карданова подвеса через вычислитель 15 соединены с датчиками момента гироскопа. В вычислитель кроме того поступает информация о скорости объекта и широте места. Вычислитель формирует управляющие и корректирующие сигналы гирокомпаса и сигнал, компенсирующий температурный дрейф гироскопа по информации термодатчика 16. Термодатчик 16 подключен к формирователю сигналов 17, который состоит из резистора 18 обратной связи, операционного усилителя 19. На входе усилителя расположены резисторы 20, 21 и 22. На фиг. 1, как пример реализации, изображен двухосный карданов подвес. Однако на практике могут встречаться и другие подвесы, например, трехосные. Гирокомпас работает следующим образом. Пусть в момент пуска гирокомпаса его главная ось отклонена на угол a от плоскости меридиана, а платформа 2 с гироскопом 4 выставлена в горизонтальной плоскости. При вращении Земли главная ось гироскопа начинает отклоняться от горизонтальной плоскости со скоростью Ucosj sin a. Угловое рассогласование между осью кинетического момента гироскопа и его корпусом или платформой измеряется датчиком угла 7, сигнал которого через усилитель 13 поступает на датчик момента 9. Последний разворачивает платформу 2 до тех пор, пока не исчезнет угловое рассогласование между осью гироскопа и его корпусом или платформой. Следовательно, платформа 2 отслеживает наклон гироскопа относительно горизонтальной оси вращения. Поэтому датчик наклона 11 платформы измеряет угол наклона платформы над плоскостью горизонта. Сигнал датчика наклона 11 поступает в вычислитель 15, где формируются сигналы управления и коррекции датчиков моментов гироскопа 5, 6. Последние создают прецессионное движение гироскопа по азимуту, направленное к меридиану, а по высоте - к плоскости горизонта. Широтная и скоростная коррекция формируется контуром управления по информации о скорости объекта ν, его широте j и курсе К. Так, азимутальная короекиия создает поецессию со скоростью, где R радиус Земли, U - угловая скорость вращения Земли. Горизонтальная коррекция создает прецессию со скоростью V/R cos К. Возникающее угловое рассогласование между осью гироскопа и его корпусом устраняется датчиками моментов 9, 10 по сигналам датчиков углов гироскопа 7, 8 и усилителей 13, 14. Итак, вертикальная рама карданова подвеса отслеживает за движением оси гироскопа в азимуте и является указателем меридиана, датчик угла 12 является датчиком курса. На фиг. 2 изображена электрическая схема - пример реализации формирователя сигнала устройства термокомпенсации тепловых дрейфов гироскопа. Схема работает следующим образом. Обозначим значение термодатчика 16 -Rt. резисторов: 18 - Roc. 20 – R1, 21 - R2, 22 - R3. При нормальных условиях (t - 20°С) подбираются такие R1 и R2 чтобы Uвых - 0. В то же время термодатчик Rt имеет характеристику где RtH - сопротивление по номиналу (например, для терморезистора СТ4-16 RtH -18 кOм), В - постоянная, Т, То - текущая температура по Кельвину и температура, при которой Rt(T) = RtH. Включение термодатчика в обратную связь операционного усилителя дает нам следующую зависимость при изменении температуры окружающей среды изменяется значение сопротивления термодатчика (2). Благодаря зависимости (3) на выходе устройства будем иметь с достаточной степенью точности линейную зависимость напряжения от изменения температуры при незначительных (единицы градусов Цельсия) изменениях последней. Данное напряжение соответствует, дрейфу гироскопа (1). вызванному изменением температуры окружающей среды. Таким образом, применение системы термокомпенсации дрейфов ДНГ приводит во-первых, к уменьшению энергопотребления гирокомпаса, во-вторых, к уменьшению времени готовности прибора, и втретьих, к повышению надежности гирокомпаса, так как система термокомпенсации значительно проще системы термостабилизации. Настоящее изобретение реализуется на существующей элементной базе. В качестве ДНГ используется двухколечный ДНГ типа ГВК-6, в качестве термодатчика - терморезистор СТ4-16, а операционный усилитель 140УД17А.
ДивитисяДодаткова інформація
Назва патенту англійськоюGyrocompass
Автори англійськоюAvrutov Vadym Viktorovych, Dedok Ihor Oleksiiovych, Zbrutskyi Oleksandr Vasyliovych, Starytskyi Lev Pavlovych, Shemelin Anatolii Valentynovych
Назва патенту російськоюГирокомпас
Автори російськоюАврутов Вадим Викторович, Дедок Игорь Алексеевич, Збруцкий Александр Васильевич, Старицкий Лев Павлович, Шемелин Анатолий Валентинович
МПК / Мітки
МПК: G01C 19/00
Мітки: гірокомпас
Код посилання
<a href="https://ua.patents.su/4-19719-girokompas.html" target="_blank" rel="follow" title="База патентів України">Гірокомпас</a>
Гірокомпас

Номер патенту: 843
Опубліковано: 15.12.1993
Автори: Андрущик Володимир Петрович, Дєдок Ігор Олексійович, Шемелін Анатолій Валентинович, Аврутов Вадим Вікторович, Збруцький Олександр Васильович, Старицький Лев Павлович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий платформу в кардановом подвесе, динамически настраиваемый гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, расположенные на платформе, два двигателя стабилизации, установленные по осям карданова подвеса, датчик курса, два блока формирования сигнала стабилизации и блок формирования управляющих и корректирующих сигналов, при этом ось чувствительности акселерометра параллельна главной оси...
Пристрій для огранки кришталевих підвісок і дорогоцінних каменів
Номер патенту: 9297
Опубліковано: 30.09.1996
Автори: Рейхерт Отто Євгенійович, Шевченко Віталій Олексійович, Задорожний Андрій Васильович, Іванов Геннадій Федорович
МПК: B28D 5/00
Мітки: огранки, пристрій, дорогоцінних, підвісок, каменів, кришталевих
Формула / Реферат:
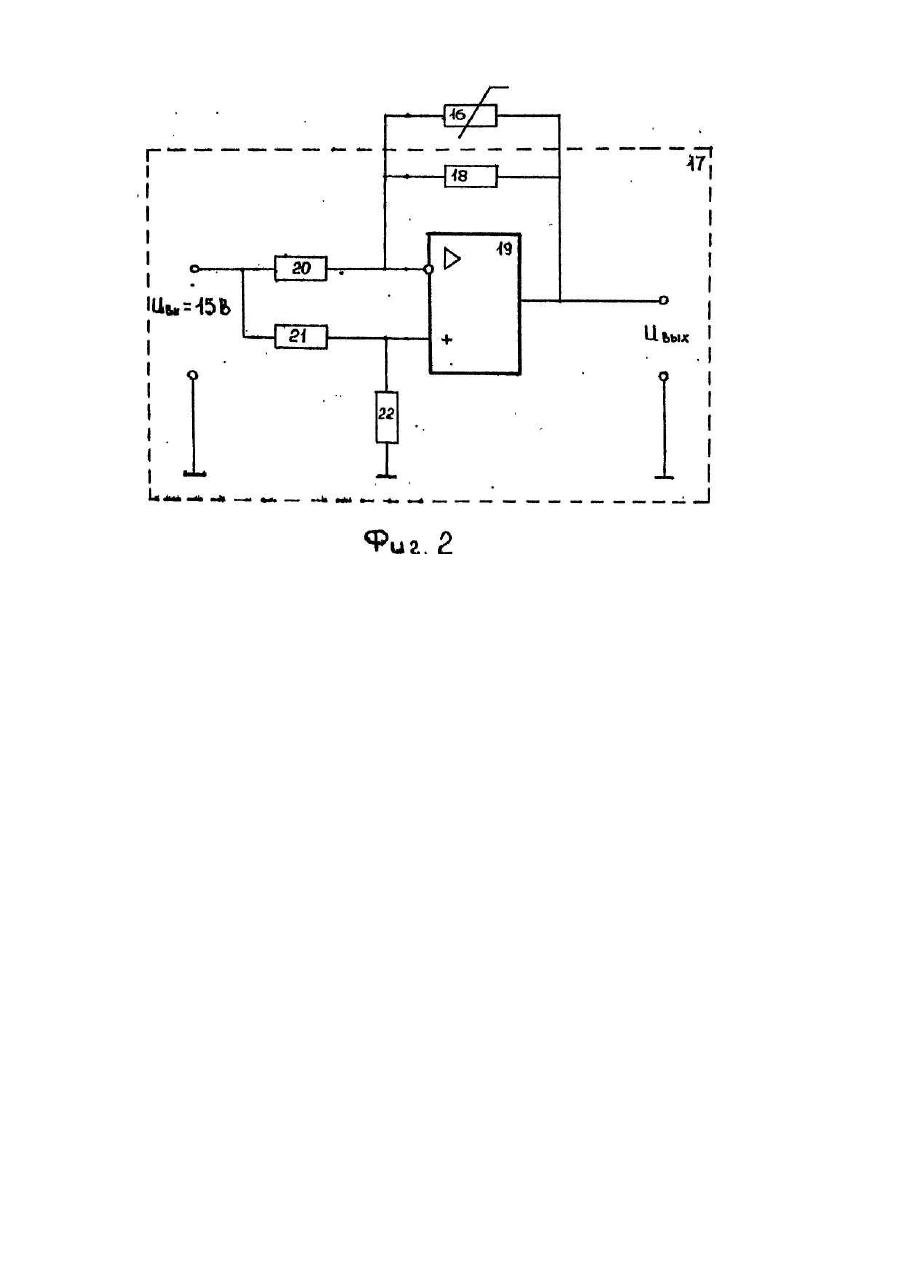
Устройство для огранки хрустальных подвесок и драгоценных камней, включающее станину, инструмент в виде цилиндра с расположенными на его периферии направляющими для установки квадрантов с обрабатываемыми изделиями, механизм подачи обрабатываемого изделия к инструменту и привод, отличающееся тем, что, с целью расширения технологических возможностей и повышения производительности, оно снабжено соединенной с приводом и квадрантами...
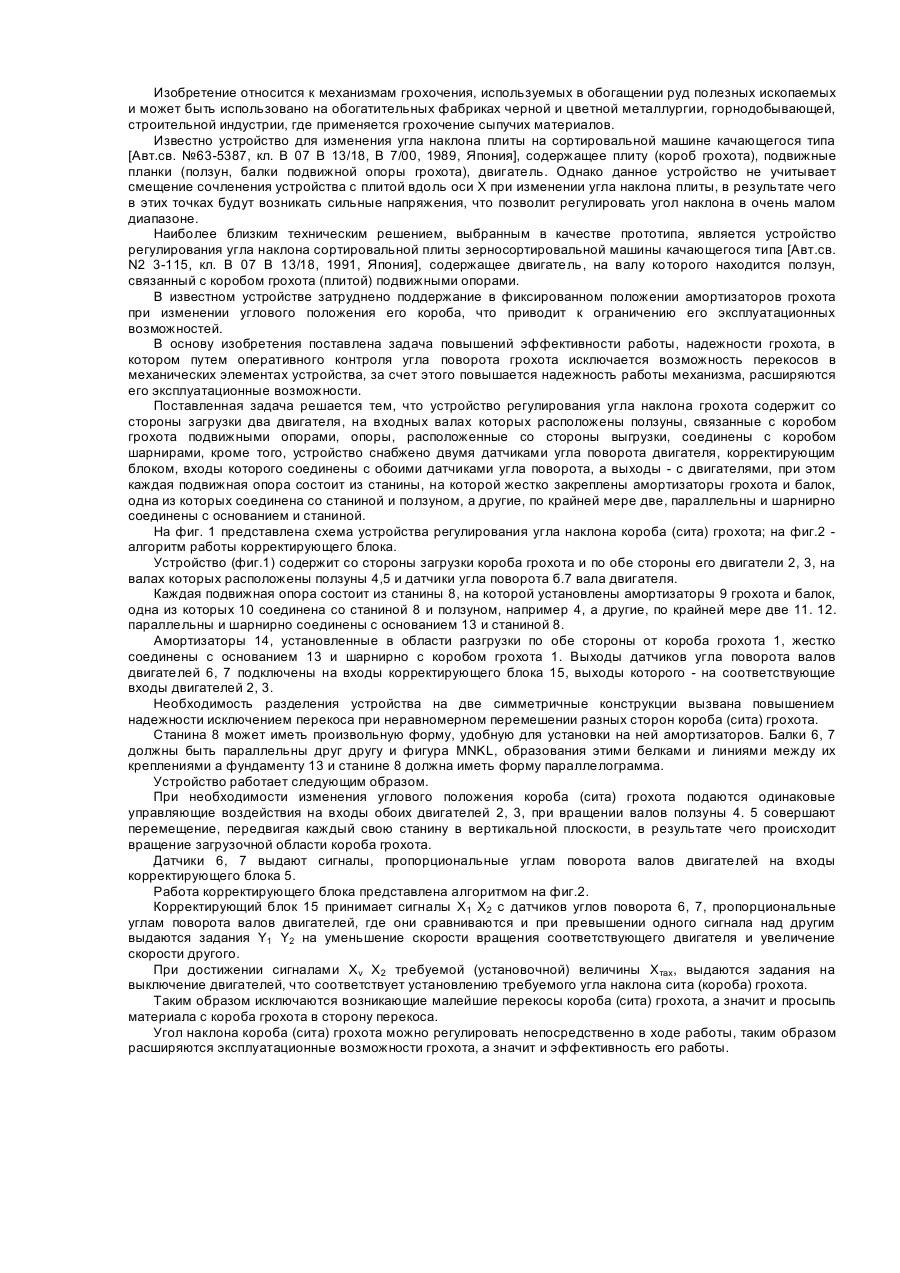
Пристрій для регулювання кута нахилу грохота
Номер патенту: 18036
Опубліковано: 17.06.1997
Автори: Танцюра Костянтин Анатольович, Назаренко Михайло Володимирович
МПК: B07B 1/28
Мітки: нахилу, пристрій, регулювання, грохота, кута
Формула / Реферат:
Устройство для регулирования угла наклона грохота, содержащее двигатель, на валу которого находится ползун, связанный с коробом грохота подвижными опорами, отличающаяся тем, что устройство снабжено дополнительным двигателем двумя датчиками угла поворота двигателя, корректирующим блоком, входы которого соединены с обоими датчиками угла поворота, а выходы - с двигателями, при этом каждая подвижная опора состоит из станины, на которой...
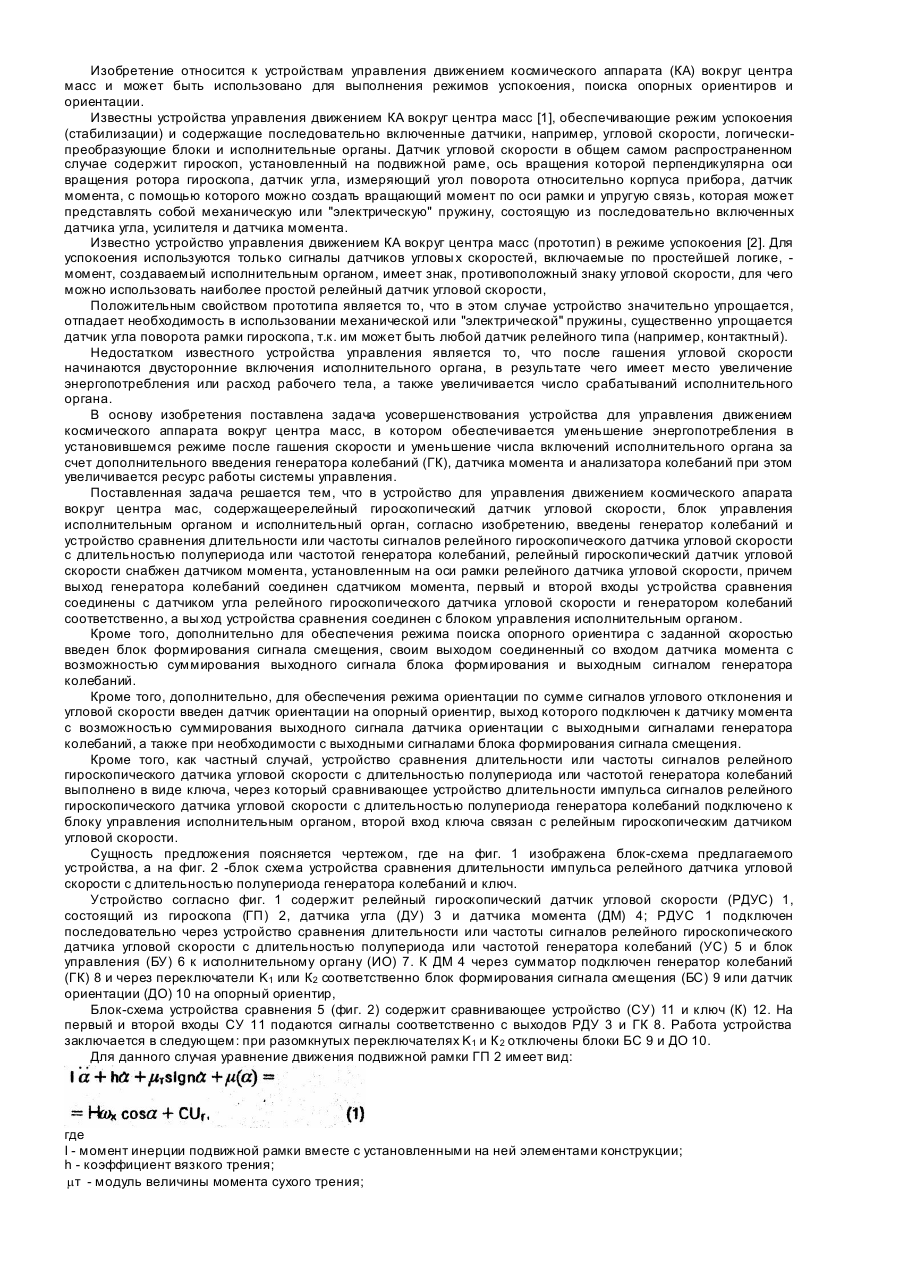
Пристрій для керування рухом космічного апарату навколо центру мас
Номер патенту: 3991
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: апарату, рухом, космічного, керування, пристрій, мас, центру
Формула / Реферат:
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный...
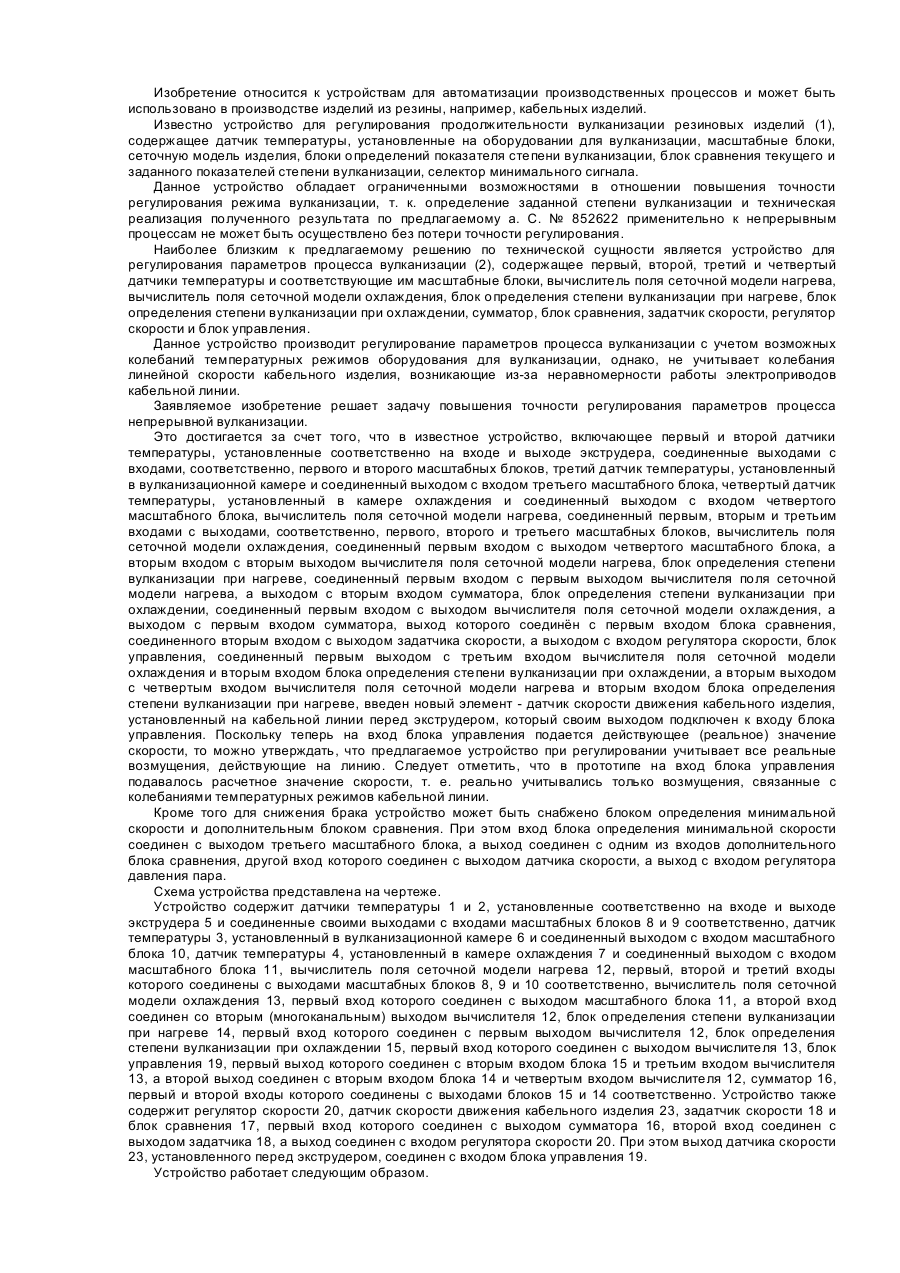
Пристрій для регулювання режиму вулканізації
Номер патенту: 10501
Опубліковано: 25.12.1996
Автори: Коржик Михайло Володимирович, Жученко Анатолій Іванович, Семікіна Лариса Феодосіївна
МПК: G05D 27/00
Мітки: режиму, регулювання, вулканізації, пристрій
Формула / Реферат:
1. Устройство для регулирования режима вулканизации, содержащее первый и второй датчики температуры, установленные соответственно на входе и выходе экструдера, соединенные выходами с сходами соответственно первого и второго масштабных блоков, третий датчик температуры, установленный в вулканизационной камере и соединенный выходом с входом третьего масштабного блока, четвертый датчик температуры, усустановленный в камере охлаждения и...
Попередній патент: Спосіб з’єднання трубчастої оболонки з трубчастою деталлю
Наступний патент: Штамп для виготовлення деталей з прутка
Випадковий патент: Спосіб одержання ліофілізованого фітоекстракту квіток конюшини лучної