Гірокомпас
Номер патенту: 843
Опубліковано: 15.12.1993
Автори: Шемелін Анатолій Валентинович, Дєдок Ігор Олексійович, Збруцький Олександр Васильович, Старицький Лев Павлович, Аврутов Вадим Вікторович, Андрущик Володимир Петрович

Формула / Реферат
Гирокомпас, содержащий платформу в кардановом подвесе, динамически настраиваемый гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, расположенные на платформе, два двигателя стабилизации, установленные по осям карданова подвеса, датчик курса, два блока формирования сигнала стабилизации и блок формирования управляющих и корректирующих сигналов, при этом ось чувствительности акселерометра параллельна главной оси гироскопа, выходы датчиков угла гироскопа соединены через соответствующие блоки формирования стабилизации с соответствующими двигателями стабилизации, выход акселерометра соединен с первым входом блока формирования управляющих и корректирующих сигналов, со вторым входом которого соединен выход датчика курса, третий и четвертый входы блока формирования управляющих и корректирующих сигналов соединены с источниками сигналов о широте места и скорости объекта, а выходы блока формирования управляющих и корректирующих сигналов соединены с датчиками момента гироскопа, отличающийся тем, что в него введены дополнительная рама подвеса и демпфер, установленный по ее оси, при этом ось дополнительной рамы совпадает с осью вращения ротора гироскопа, а центр тяжести дополнительной рамы смещен вниз относительно центра подвеса.
Текст
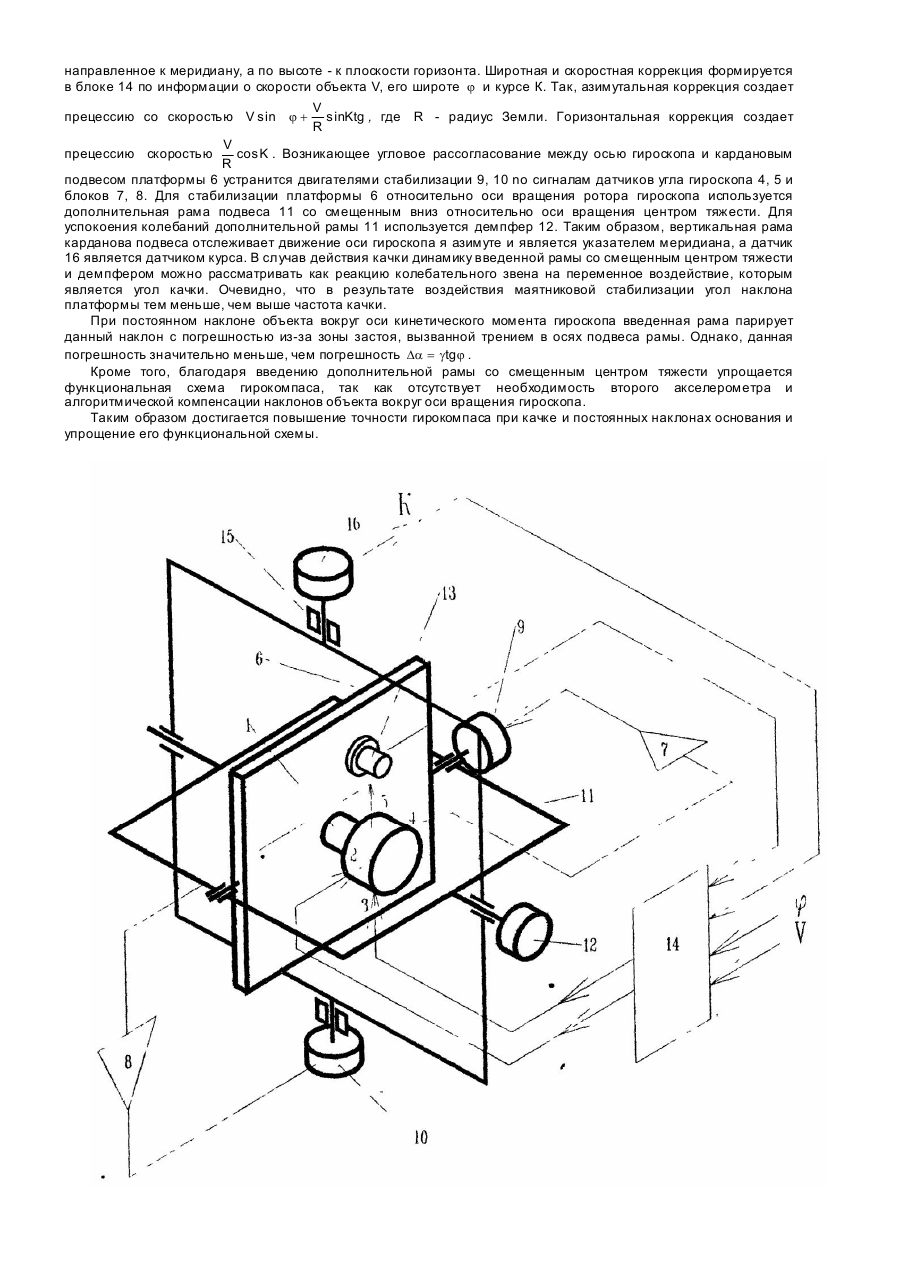
Изобретение относится к морскому приборостроению и может использоваться в системах навигации подвижных объектов для определения курса. Наиболее близким по технической сущности к данному изобретению является гироскоп Robenson SKR-80, построенный на индикаторном гиростабилизаторе, использующем динамически настраиваемый гироскоп [1]. Чувствительный элемент данного прибора расположен на платформе с двухосным кардановым подвесом, стабилизируемым двигателями стабилизации, расположенными в цапфах кардановых рам, по сигналам датчиков углов динамически настраиваемого гироскопа (ДНГ). Управление положением ротора гироскопа осуществляется датчиками моментов ДНГ по сигналам двух акселерометров, расположенных взаимно перпендикулярно на платформе. и внешней информации о скорости, широте и текущем курсе объекта. Первый акселерометр расположен так, что его ось чувствительности параллельна главной оси гироскопа. Второй акселерометр является датчиком угла наклона платформы вокруг оси вращения ротора ДНГ. Недостатком известного гирокомпаса является появление значительных погрешностей, вызванных двухосной схемой карданового подвеса платформы при постоянных наклонах основания и качке объекта. Таким погрешностями являются: - методическая погрешность, вызванная наклоном основания вокруг оси вращения ротора гироскопа Da = gtg j , где g -угол постоянного наклона основания, j -широта места; - кардановая погрешность; - систематическая погрешность, вызванная качкой объекта; где V - угло вая скорость вращения земли; g k - угол качки; погрешности, вызванные дрейфами ДНГ, которые зависят от ускорения. Для алгоритмической компенсации данных погрешностей контуром компенсации служит информация второго акселерометра. Попытка компенсировать систематические погрешности, вызванные качкой объекта, приводят к усложнению контура компенсации. Однако, испытания гирокомпаса SKR-80 на стенде Скорсби показали, что прибор имеет значительные систематические погрешности (1-1,200) на интеркардинальных и главных румбах. Задачей изобретения является усовершенствование гирокомпаса путем уменьшения погрешностей, возникающих при постоянных наклонах основания и качке объекта, что позволяет повысить его точность и упростить функциональную схему устройства. Задача решается тем, что в гирокомпас, содержащий динамически настраиваемый гироскоп с двумя датчиками момента и двумя датчиками угла, расположенный на платформе в кардановом подвесе, стабилизируемом относительно двух осей подвеса с помощью двух блоков формирования сигналов стабилизации и двух двигателей стабилизации по сигналам соответствующи х датчиков угла гироскопа, а также акселерометр, ось чувствительности которого параллельна главной оси гироскопа, датчик курса и блок формирования управляющих и корректирующих сигналов, первый вход которого соединен с выходом второго акселерометра, второй вход - с выходом датчика курса, а третий и четвертый входы - с источниками информации о широте места и скорости объекта, выходы блока формирования управляющих и корректирующих сигналов соединены с датчиками момента гироскопа, согласно изобретению, введена дополнительная рама подвеса со смещенным вниз центром тяжести для обеспечения маятниковой стабилизации платформы относительно третьей оси подвеса, совпадающей с осью вращения ротора гироскопа. Для успокоения угловых колебаний вокруг этой оси введен демпфер. Введение маятниковой стабилизации платформы вокруг оси вращения ротора гироскопа позволяет уменьшить угол gП наклона платформы относительно данной оси. Как следует из перечисленных выше выражений погрешностей гирокомпаса, вызванных постоянными и переменными наклонами по углу g . введение дополнительной рамы подвеса уменьшает эти погрешности. Следовательно, отсутствует необходимость в их алгоритмической компенсации и, как следствие, нет необходимости в наличии датчика наклона, которым является второй акселерометр прототипа. Сущность изобретения поясняется чертежом, на котором представлена принципиальная схема гирокомпаса. Гирокомпас содержит динамически настраиваемый гироскоп 1 с датчиками момента 2, 3 и датчиками угла 4, 5, измеряющими отклонение ротора гироскопа относительно его корпуса. Гироскоп расположен на платформе 6 в трехосном кардановом подвесе, стабилизированном по двум осям блоками формирования сигналов стабилизации 7,8 и двигателями стабилизации 9, 10, расположенными в двух цапфа х карданова подвеса, по сигналам соответствующи х датчиков угла гироскопа, а по третьей оси стабилизированном дополнительной рамой подвеса 11 со смещенным вниз центром тяжести относительно оси вращения рамы. Демпфер 12, расположенный в цапфах подвеса рамы, демпфирует колебания данной рамы. На платформе размещен акселерометр 13. являющийся датчиком наклона платформы относительно плоскости горизонта. Акселерометр связан с блоком формирования управляющих и корректирующи х сигналов 14, а который поступает кроме того информация о скорости объекта, широте и текущем курсе. Блок 14 формирует управляющие и корректирующие сигналы, которые поступают на датчики момента гироскопа. На корпусе прибора 15 расположен датчик курса 16, подвижная часть которого связана с вертикальной осью вращения карданова подвеса, внешняя рама которого является указателем меридиана. Гирокомпас работает следующим образом. При отклонении оси гирокомпасе от меридиана на какой-то угол a у гироскопа 1, установленного на платформе 6, главная ось начинает отклоняться от горизонтальной плоскости со скоростью V cos sina . При наклоне оси кинетического момента гироскопа относительно платформы возникает сигнал датчика угла 4, который поступает на блок формирования сигнала стабилизации 7, а затем на двигатель стабилизации 9. Последний разворачивает платформу до тех пор, пока не исчезает угловое рассогласование между осью гироскопа и платформой. В результате платформа отслеживает наклон гироскопа относительно оси вращения, а сигнал акселерометра 13, пропорциональный углу наклона платформы над плоскостью горизонта, поступает в блок формирования управляющих и корректирующи х сигналов 14, где формируются сигналы управления в датчики момента гироскопа 2, 3. Последние создают прецессионное движение гироскопа по азимуту, направленное к меридиану, а по высоте - к плоскости горизонта. Широтная и скоростная коррекция формируется в блоке 14 по информации о скорости объекта V, его широте j и курсе К. Так, азимутальная коррекция создает V прецессию со скоростью V sin j + sinKtg , где R - радиус Земли. Горизонтальная коррекция создает R V прецессию скоростью cos K . Возникающее угловое рассогласование между осью гироскопа и кардановым R подвесом платформы 6 устранится двигателями стабилизации 9, 10 no сигналам датчиков угла гироскопа 4, 5 и блоков 7, 8. Для стабилизации платформы 6 относительно оси вращения ротора гироскопа используется дополнительная рама подвеса 11 со смещенным вниз относительно оси вращения центром тяжести. Для успокоения колебаний дополнительной рамы 11 используется демпфер 12. Таким образом, вертикальная рама карданова подвеса отслеживает движение оси гироскопа я азимуте и является указателем меридиана, а датчик 16 является датчиком курса. В случав действия качки динамику введенной рамы со смещенным центром тяжести и демпфером можно рассматривать как реакцию колебательного звена на переменное воздействие, которым является угол качки. Очевидно, что в результате воздействия маятниковой стабилизации угол наклона платформы тем меньше, чем выше частота качки. При постоянном наклоне объекта вокруг оси кинетического момента гироскопа введенная рама парирует данный наклон с погрешностью из-за зоны застоя, вызванной трением в осях подвеса рамы. Однако, данная погрешность значительно меньше, чем погрешность Da = gtg j . Кроме того, благодаря введению дополнительной рамы со смещенным центром тяжести упрощается функциональная схема гирокомпаса, так как отсутствует необходимость второго акселерометра и алгоритмической компенсации наклонов объекта вокруг оси вращения гироскопа. Таким образом достигается повышение точности гирокомпаса при качке и постоянных наклонах основания и упрощение его функциональной схемы.
ДивитисяДодаткова інформація
Назва патенту англійськоюGyrocompass
Автори англійськоюAvrutov Vadym Viktorovych, Zbrutskyi Oleksandr Vasyliovych, Dedok Ihor Oleksiiovych, Shemelin Anatolii Valentynovych, Andruschyk Volodymyr Petrovych, Starytskyi Lev Pavlovych
Назва патенту російськоюГирокомпас
Автори російськоюАврутов Вадим Викторович, Збруцкий Александр Васильевич, Дедок Игорь Алексеевич, Шемелин Анатолий Валентинович, Андрущик Владимир Петрович, Старицкий Лев Павлович
МПК / Мітки
МПК: G01C 19/00
Мітки: гірокомпас
Код посилання
<a href="https://ua.patents.su/2-843-girokompas.html" target="_blank" rel="follow" title="База патентів України">Гірокомпас</a>
Перевантажувач для закладки породи в вироблений простір лав з похилим заляганням вугільних пластів
Номер патенту: 139
Опубліковано: 30.04.1993
Автори: Пророченко Валерій Іванович, Овчинніков Віталій Пилипович, Глухов Георгій Іванович, Федосенко Микола Васильович, Бендерський Микола Васильович
МПК: E21F 13/08
Мітки: вугільних, перевантажувач, пластів, простір, породи, похилим, заляганням, закладки, лав, вироблений
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Перегружатель для закладки породы в выработанное пространство лав с пологим залеганием угольных пластов, включающий ходовую тележку с опорной платформой, на которой расположен секционный ленточный транспортер с закрепленным на нем бункером, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности и снижения энергозатрат на транспортирование породы за счет регулировки угла наклона рамы...
Базалійський вимірювач кутового прискорення вала
Номер патенту: 23
Опубліковано: 30.04.1993
Автори: Музичук Федір Максимович, Музичук Антон Максимович
МПК: G01P 15/18, G01P 15/00
Мітки: базалійський, прискорення, вимірювач, кутового, вала
Формула / Реферат:
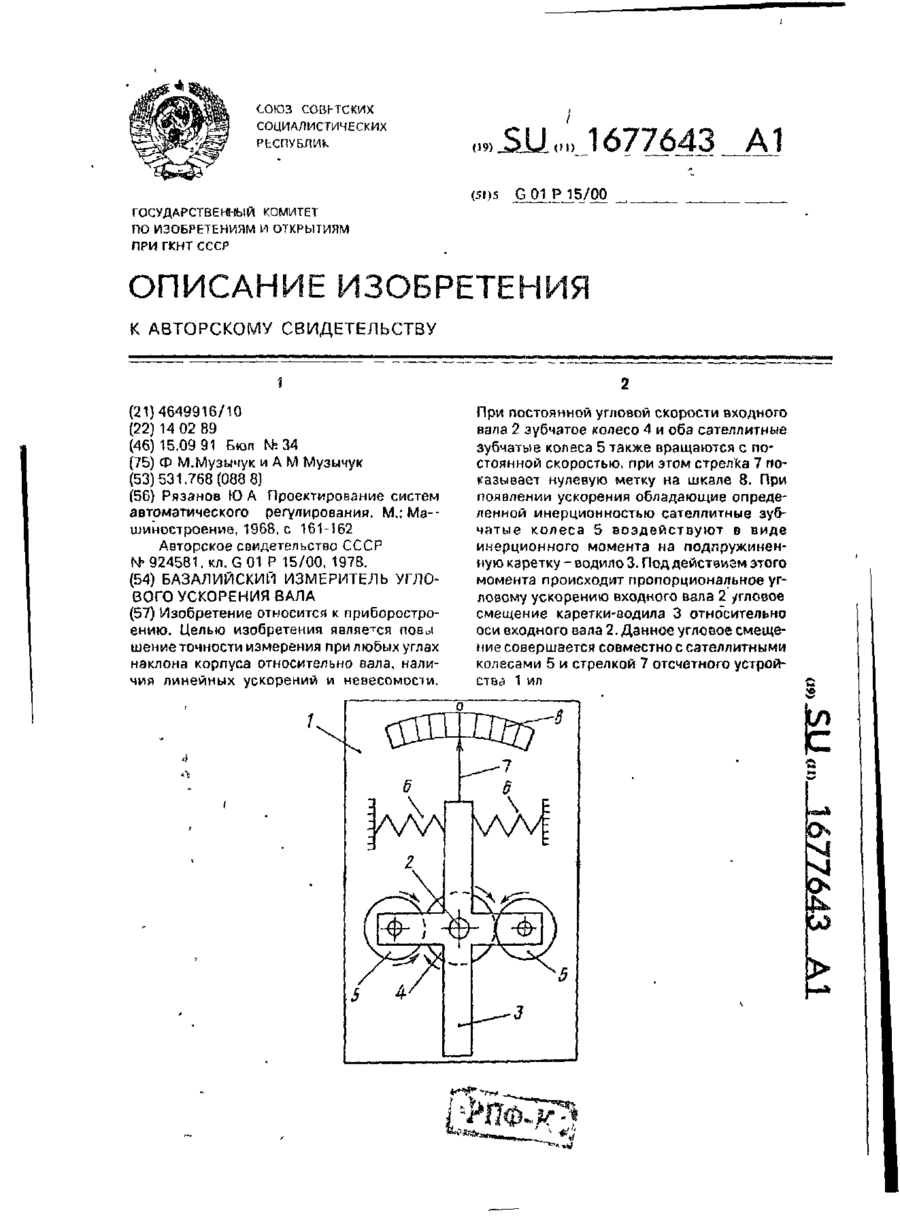
Формула изобретенияБазалийский измеритель углового ускорения вала, содержащий корпус, каретку-водило с зубчатым колесом-сателлитом, связанным с зубчатым колесом, закрепленным на валу, стрелку, связанную с кареткой, и шкалу, закрепленную на корпусе, отличающийся тем, что, с целью повышения точности измерения при любых углах наклона корпуса относительно вала, наличия линейных ускорений и невесомости, каретка снабжена вторым зубчатым...
Опорно-поворотний пристрій рефлектора
Номер патенту: 706
Опубліковано: 15.12.1993
Автор: Мамчур Володимир Мирославович
МПК: H01Q 1/12
Мітки: рефлектора, опорно-поворотний, пристрій
Формула / Реферат:
Опорно-поворотное устройство рефлектора, содержащее стержневой конус, вершина которого расположена на фокальной оси рефлектора, а свободные концы стержней закреплены на каркасе рефлектора, консоль, первый конец которой соединен с вершиной стержневого конуса, а второй — с центральной частью каркаса рефлектора, второй конец консоли и вершина стержневого конуса оперты на шарниры оси угла места, сектор привода угла места закреплен на...
Спосіб гасіння коливань ротора парової турбіни
Номер патенту: 347
Опубліковано: 30.04.1993
Автори: Косінов Юрій Павлович, Цибулько Вадим Йосипович, Метельов Леонід Дмитрович, Квашин Михайло Федорович
МПК: F01D 17/00
Мітки: турбіни, парової, спосіб, ротора, коливань, гасіння
Формула / Реферат:
Способ гашения колебаний ротора паровой турбины путем поддержания за органами парораспределения давления пара на заданном уровне, соответствующем режиму работы турбины, отличающийся тем, что, с целью повышения эффективности гашения колебаний ротора, одновременно с поддержанием за органами парораспределения давления пара на заданном уровне производят измерение колебаний ротора, по результатам которого путем воздействия на органы...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 360
Опубліковано: 30.04.1993
Автори: Цибулько Вадим Йосипович, Морозов Микола Ібрагимович, Метельов Леонід Дмитрович, Барков Олександр Степанович
МПК: F01D 21/00
Мітки: турбомашині, максимального, пристрій, ротора, контролю, осі, відхілення
Формула / Реферат:
Формула изобретения Устройство для контроля максимального отклонения ротора от оси турбомашины, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные блоки...
Попередній патент: Штучна кисть
Наступний патент: Пристрії для визначення в’язкості
Випадковий патент: Спосіб прогнозування вмісту важких металів у хижих видів риб дніпровських водосховищ (пеп-4)