Система компенсації перешкод
Номер патенту: 24094
Опубліковано: 25.06.2007
Автори: КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Каспирович Олександр Генадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ

Формула / Реферат
Система компенсації перешкод, що містить основний і допоміжний аналого-цифрові перетворювачі (АЦП), основний і допоміжний блоки вагової обробки і n-канальні запам'ятовуючі пристрої (ЗП), n-канальний пристрій компенсації перешкод, кожен канал якого містить по суматору й помножувачу, блок обчислення вагового коефіцієнта, який складається з корелятора, основного і допоміжного фазових фільтрів, процесора фільтрів, блока некогерентного визначника, при цьому входи основного і допоміжного АЦП є входами системи, а виходи через послідовно включені блоки вагової обробки підключені до входів відповідних ЗП, виходи основного і допоміжного фазових фільтрів блока обчислення вагового коефіцієнта підключені до входів корелятора, вихід якого підключений до з'єднаних між собою керуючих входів всіх помножувачів, виходи яких підключені до компенсуючих входів, відповідних суматорів, вихід процесора фільтрів підключений до входу некогерентного визначника, вихід якого є виходом системи, яка відрізняється тим, що входи основного і допоміжного фазових фільтрів блока обчислення вагового коефіцієнта підключені до виходів відповідних блоків вагової обробки, при цьому виходи основного ЗП підключені до входів, що компенсуються, відповідних суматорів, виходи яких підключені до відповідних входів процесора фільтрів, а виходи допоміжного ЗП підключені до входів відповідних помножувачів пристрою компенсації перешкод.
Текст
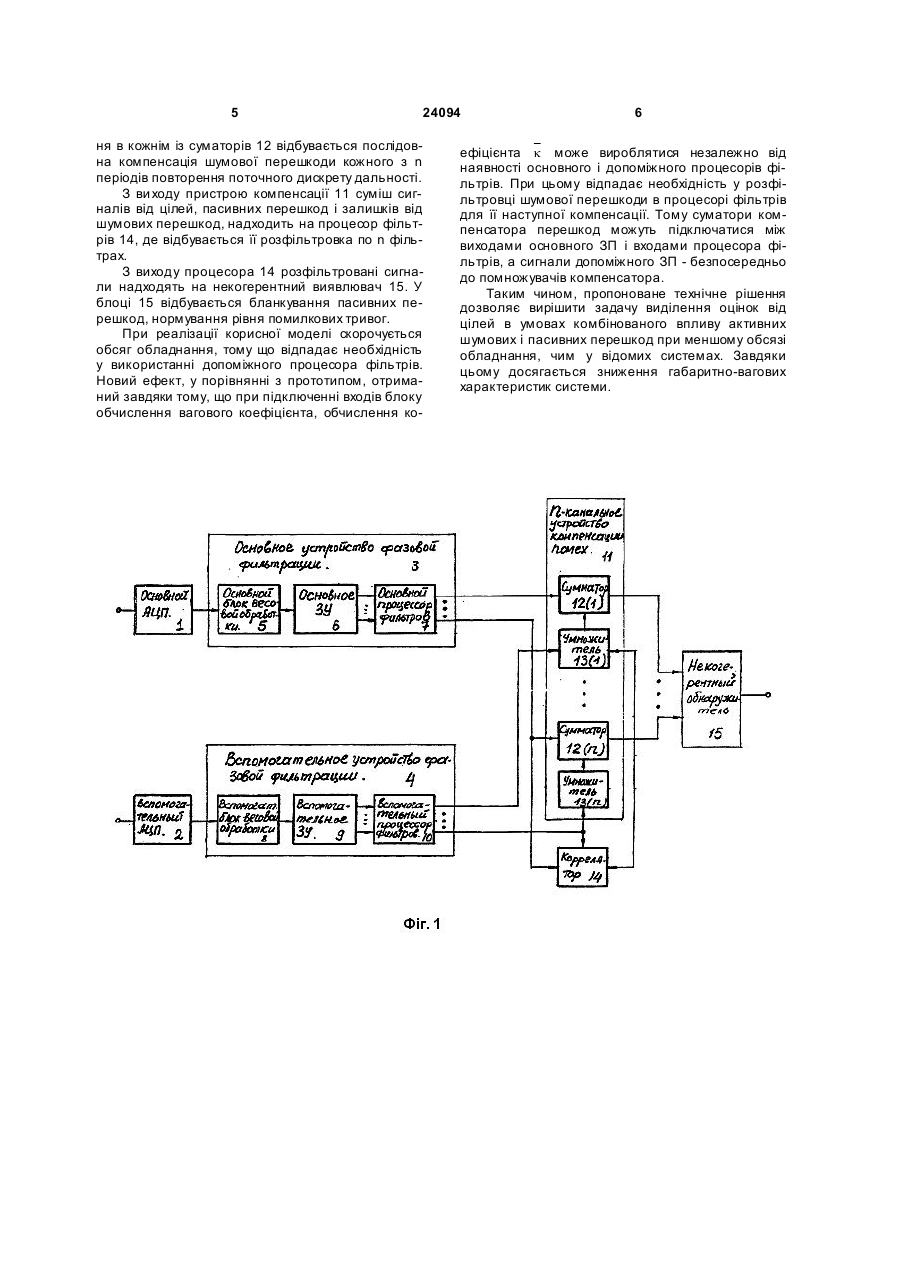
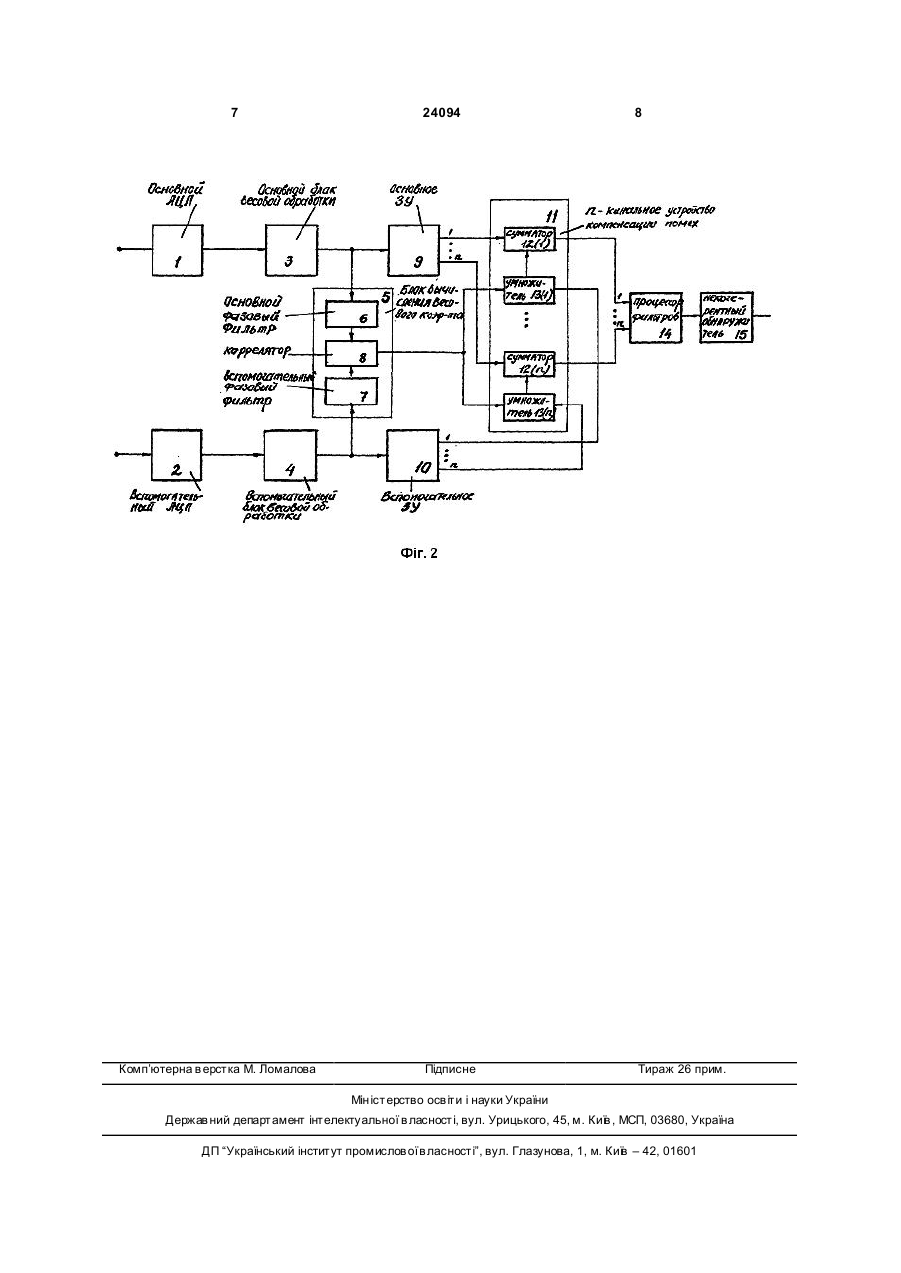
Система компенсації перешкод, що містить основний і допоміжний аналого-цифрові перетворювачі (АЦП), основний і допоміжний блоки вагової обробки і n-канальні запам'ятовуючі пристрої (ЗП), n-канальний пристрій компенсації перешкод, кожен канал якого містить по суматору й помножувачу, блок обчислення вагового коефіцієнта, який складається з корелятора, основного і допоміжного фазових фільтрів, процесора фільтрів, блока некогерентного визначника, при цьому входи основного і допоміжного АЦП є входами системи, а 3 24094 ції перешкод 11, що містить по п суматорів 12 і помножувачів 13; блок обчислення вагового коефіцієнта 14; некогерентний виявлювач 15. Недоліком відомої системи є великий обсяг обладнання. В основу корисної моделі поставлена задача скорочення обсягу обладнання. Поставлена задача досягається тим, що система компенсації перешкод, що містить основний і допоміжний АЦП, основний і допоміжний блоки вагової обробки і n канальні ЗП, n-канальний пристрій компенсації перешкод, кожен канал якого містить по суматору й помножувачу, блок обчислення вагового коефіцієнта, який складається з корелятора, основного і допоміжного фазових фільтрів, процесора фільтрів, блоку некогерентного виявлювача, при цьому входи основного і допоміжного АЦП є входами системи, а виходи через послідовно включені блоки вагової обробки підключені до входів відповідних ЗП, виходи основного і допоміжного фазових фільтрів блоку обчислення вагового коефіцієнта підключені до входів корелятора, вихід якого підключений до з'єднаних між собою керуючих входів всіх помножувачів, виходи яких підключені до компенсуючих входів, відповідних суматорів, ви хід процесора фільтрів підключений до входу некогерентного виявлювача, вихід якого є ви ходом системи, а входи основного і допоміжного фазових фільтрів блоку обчислення вагового коефіцієнта підключені до виходів відповідних блоків вагової обробки, при цьому виходи основного ЗП підключені до входів, що компенсуються, відповідних суматорів, виходи яких підключені до відповідних входів процесора фільтрів, а виходи допоміжного ЗП підключені до входів відповідних помножувачів пристрою компенсації перешкод. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в такому. Завдяки тому, що в заявленій системі входи основного і допоміжного фазових фільтрів блоку обчислення вагового коефіцієнта підключені до виходів відповідних блоків вагової обробки, при цьому виходи основного ЗП підключені до входів, що компенсуються, відповідних суматорів, виходи яких підключені до відповідних входів процесора фільтрів, а ви ходи допоміжного ЗП підключені до входів відповідних помножувачів пристрою компенсації перешкод, скорочений обсяг обладнання. Сутність корисної моделі пояснюється кресленням, де на Фіг.2 показана структурна схема СКП. СКП містить: основний і допоміжний АЦП 1,2, основний і допоміжний блоки вагової обробки 3, 4, блок обчислення вагового коефіцієнта 5, що складається з основного і допоміжного фазових фільтрів 6, 7 і корелятора 8, основний і допоміжний nканальні ЗП 9, 10, n-канальний компенсатор 11, кожен канал якого містить по суматору 12 і помножувачу 13, процесор фільтрів 14, блок некогерентного виявлювача 15. При цьому входи основного і допоміжного АЦП 1, 2 є входами системи, а виходи, через послідовно включені блоки вагової обробки 3, 4, підключені до входів відповідних ЗП 9, 4 10, а також до входів відповідних фазових фільтрів 6, 7 виходи яких підключені до входів корелятора 8. Вихід корелятора 8 підключений до з'єднаних між собою керуючих входів всіх помножувачів 13, входи яких підключені до відповідних виходів допоміжного ЗП 10, а виходи - до компенсуючих входів, відповідних суматорів 12. Входи, що компенсуються суматорів 12 підключені до відповідного виходам основного ЗП 9, а виходи - до відповідного входам процесора фільтрів 14, вихід якого підключений до входу блоку некогерентного виявлювача 15. Вихід блоку 15 є виходом системи. Система компенсації перешкод працює таким чином. Сигнали цілей, пасивних і активних шумових перешкод, що надходять на основний і допоміжні входи системи, після аналого-цифрового перетворення в блоках 1, 2 надходять на входи блоків вагової обробки 3, 4. У блоках вагової обробки 3, 4 відбувається множення цифрових кодів сумішів сигналів на вагову функцію, що дозволяє при наступній обробці в процесорі фільтрів 14 і у фазових фільтрах 6, 7 блоку 5 досягти заданий рівень бічних пелюстків. «Зважені» сигнали з блоків 3, 4 надходять на входи блоку 5 і ЗП 9, 10. У блоці 5 обчислюється ваговий коефіцієнт шумової перешкоди k. Для виключення спрацьовування корелятора 8 по пасивній компоненті перешкоди, перед ним встановлені основний і допоміжний фазові фільтри 6, 7. Ці фільтри настроюються на виділення спектральних складових сигналів з максимальною зміною фази від періоду до періоду випромінювання локатора. Враховуючи, що фазовій фільтрації передувала вагова обробка в блоках 3, 4, відгуки від відносно малорухомих пасивних перешкод у фільтрах 6, 7 будуть максимально ослаблені. Тому, що шумова перешкода має широкий фазовий спектр, вона буде виділена в цих фільтрах і вагомий коефіцієнт k у блоці 5 обчислюється тільки по шумовій компоненті перешкоди. Обчислене значення коефіцієнта к для кожного дискрету дальності запам'ятовується буферним ЗП, що входить до складу корелятора 8. Одночасно з обчисленням коефіцієнта k у блоках ЗП 9, 10 відбувається запам'ятовування «зваженої» інформації кожного дискрету дальності протягом n періодів повторення. Після цього за допомогою системи синхронізації (на Фіг.2 синхронізація не приводиться) відбувається подискретна видача накопиченої в ЗП 9, 10 інформації за n періодів повторення відповідно на входи, що компенсуються суматорів 12, або на входи помножувачів 13. При цьому інформація 1-го періоду повторення подається на суматор 12 (1) або помножувач 13 (1), а n-ного періоду - на суматор 12 (n), або помножувач 13 (n). Одночасно з цим на керуючі входи помножувачів 13 з виходу блоку 5 надходять вагові коефіцієнти k відповідного дискрету дальності. У блоках 13 відбувається комплексне множення сигналів з допоміжного ЗП 10 на коефіцієнт k і видача результату на входи, що компенсують, відповідних суматорів 12. У результаті вирахуван 5 24094 ня в кожнім із суматорів 12 відбувається послідовна компенсація шумової перешкоди кожного з n періодів повторення поточного дискрету дальності. З ви ходу пристрою компенсації 11 суміш сигналів від цілей, пасивних перешкод і залишків від шумових перешкод, надходить на процесор фільтрів 14, де відбувається її розфільтровка по n фільтрах. З виходу процесора 14 розфільтровані сигнали надходять на некогерентний виявлювач 15. У блоці 15 відбувається бланкування пасивних перешкод, нормування рівня помилкових тривог. При реалізації корисної моделі скорочується обсяг обладнання, тому що відпадає необхідність у використанні допоміжного процесора фільтрів. Новий ефект, у порівнянні з прототипом, отриманий завдяки тому, що при підключенні входів блоку обчислення вагового коефіцієнта, обчислення ко 6 ефіцієнта k може вироблятися незалежно від наявності основного і допоміжного процесорів фільтрів. При цьому відпадає необхідність у розфільтровці шумової перешкоди в процесорі фільтрів для її наступної компенсації. Тому суматори компенсатора перешкод можуть підключатися між виходами основного ЗП і входами процесора фільтрів, а сигнали допоміжного ЗП - безпосередньо до помножувачів компенсатора. Таким чином, пропоноване технічне рішення дозволяє вирішити задачу виділення оцінок від цілей в умовах комбінованого впливу активних шумових і пасивних перешкод при меншому обсязі обладнання, чим у відомих системах. Завдяки цьому досягається зниження габаритно-вагових характеристик системи. 7 Комп’ютерна в ерстка М. Ломалова 24094 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for compensating radio interferences
Автори англійськоюKononovych Viktor Yakovych, KUKOLNITSKYI ANATOLII PYLYPOVYCH, Kaspyrovych Oleksandr Hennadiiovych
Назва патенту російськоюСистема для компенсации радиопомех
Автори російськоюКононович Виктор Яковлевич, КУКОЛЬНИЦКИЙ АНАТОЛИЙ ФИЛИППОВИЧ, Каспирович Александр Геннадиевич
МПК / Мітки
МПК: G01S 7/36
Мітки: система, перешкод, компенсації
Код посилання
<a href="https://ua.patents.su/4-24094-sistema-kompensaci-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Система компенсації перешкод</a>
Цифрова система компенсації активних завад
Номер патенту: 19756
Опубліковано: 15.12.2006
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович
МПК: G01S 7/36
Мітки: компенсації, система, завад, цифрова, активних
Формула / Реферат:
Цифрова система компенсації активних завад, що містить основний і допоміжний входи, основний і допоміжний блоки фазових фільтрів, кожний з яких містить по п фільтрів, основний і допоміжний комутатори, блок обчислення вагового коефіцієнта, основний і допоміжний блоки запам`ятовуючого пристрою (ЗП), суматор, помножувач, при цьому основний вхід системи підключений до входів основного блока фазових фільтрів і до входу основного блока ЗП, вихід...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Чорнобородова Наталя Петрівна, Часовський Валентин Олександрович, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: система, несинхронних, завад, цифрова, компенсації, імпульсних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Чорнобородов Михайло Петрович, Часовський Валентин Олександрович
МПК: G01S 7/36
Мітки: несинхронних, імпульсних, система, компенсації, цифрова, завад
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Попов Олег Якович, Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, Луханін Михайло Іванович, Мокеєв Юрій Геннадійович
МПК: G01S 7/36
Мітки: активних, пристрій, компенсації, завад, шумових
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, Траілін Вячеслав Федорович, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мирошниченко Михайло Іванович, Каспирович Олександр Геннадійович, Лаврентьєв Володимир Миколайович
МПК: G01S 7/36
Мітки: завад, активних, компенсації, шумових, пристрій
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Попередній патент: Спосіб передпосівної підготовки насіння люцерни
Наступний патент: Конструкція цегляно-залізобетонної рами
Випадковий патент: Спосіб лікування хворих на звичайні вугри