Поляризаційний пристрій заглушення завад
Номер патенту: 26490
Опубліковано: 25.09.2007
Формула / Реферат
Поляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пеленгаційний пристрій, входи якого підключені до виходів першого і другого каналів прийому, пристрій керування і комутатор каналів, керуючий вхід якого підключений до пристрою синхронізаії, сигнальні входи підключені до допоміжної антени і до одного з виходів основної антени, а вихід з'єднаний з входом другого каналу прийому, причому вихід пеленгаційного пристрою підключений до пристрою керування, з'єднаного з керуючим входом двоканального комутатора, при цьому вихід пеленгаційного пристрою і вихід автокомпенсатора є виходами системи, який відрізняється тим, що він додатково містить другий пороговий елемент, схему І і тригер, вихід якого підключений до двоканального комутатора, при цьому опорний вхід другого порогового елемента з'єднаний із сигнальним входом першого порогового елемента, виходи порогових елементів з'єднані з першим і другим входами схеми І, до третього входу якої підключений вихід тригера, що інвертує, вихід схеми І з'єднаний із входом установки нуля тригера, інформаційний вхід якого з'єднаний з виходом другого порогового елемента, а керуючий вхід тригера підключений до другого виходу синхронізатора.
Текст
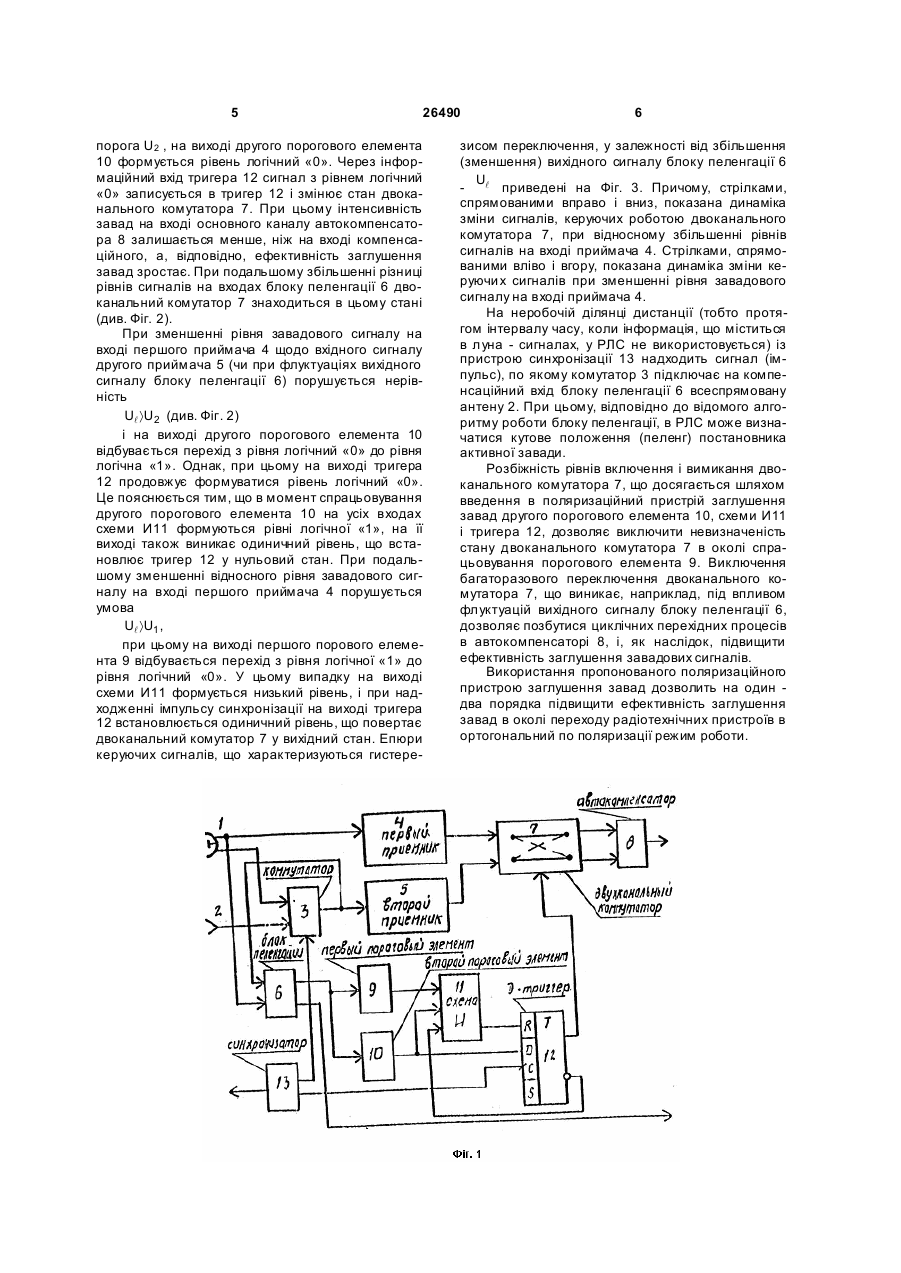
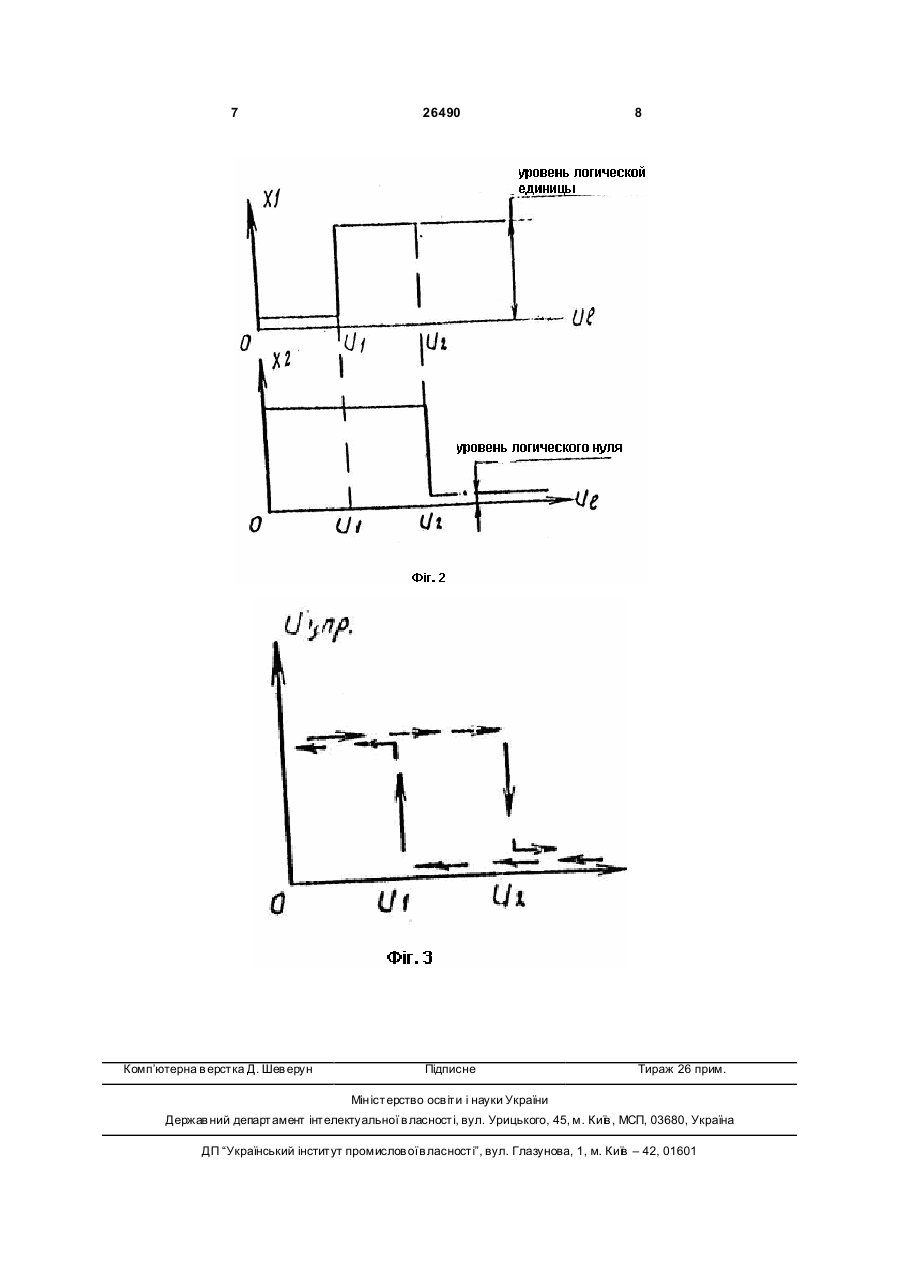
Поляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пеленгаційний пристрій, входи якого підключені до виходів першого і другого каналів прийому, пристрій керування і комутатор каналів, керуючий вхід якого підключений до пристрою синхронізаії, сигнальні входи підключені до допоміжної антени і до одного з виходів основної антени, а вихід з'єдна 3 26490 ляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пеленгаційний пристрій, входи якого підключені до виходів першого і другого каналів прийому, пристрій керування і комутатор каналів, керуючий вхід якого підключений до пристрою синхронізаії, сигнальні входи підключені до допоміжної антени і до одного з виходів основної антени, а вихід з'єднаний з входом другого каналу прийому, причому вихід пеленгаційного пристрою підключений до пристрою керування, з'єднаному з керуючим входом двоканального комутатора, при цьому вихід пеленгаційного пристрою і вихід автокомпенсатора є виходами системи, що відрізняється тим, що він додатково містить другий пороговий елемент, схему И і тригер, вихід якого підключений до двоканального комутатора, при цьому опорний вхід другого порогового елемента з'єднаний із сигнальним входом першого порогового елемента, виходи порогових елементів з'єднані з першим і другим входами схеми И, до третього входу якої підключений вихід тригера, що інвертує, ви хід схеми И з'єднаний із входом установки нуля тригера, інформаційний вхід якого з'єднаний з виходом другого порогового елемента, а керуючий вхід тригера підключений до другого ви ходу синхронізатора. Причинно - наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в наступному. Завдяки тому, що пристрій додатково містить другий пороговий елемент, схему И і тригер, ви хід якого підключений до двоканального комутатора, при цьому опорний вхід другого порогового елемента з'єднаний із сигнальним входом першого порогового елемента, виходи порогових елементів з'єднані з першим і другим входами схеми И, до третього входу якої підключений вихід тригера, що інвертує, ви хід схеми И з'єднаний із входом установки нуля тригера, інформаційний вхід якого з'єднаний з виходом другого порогового елемента, а керуючий вхід тригера підключений до другого виходу син хронізатора - підвищена ефективність заглушення завад з довільною поляризацією за рахунок гистерезиса переключення двоканального комутатора. Суть корисної моделі пояснюється кресленнями, де на Фіг. 1 представлена структурна електрична схема пропонованого пристрою; на Фіг. 2 приведені епюри вихідних сигналів першого (XI) і другого (Х2) порогових елементів; на Фіг. 3 приведені епюри сигналів, що керують роботою двоканального комутатора. Пропонований поляризаційний пристрій заглушення завад містить (див. Фіг. 1) дуально - поляризовану 1 і всеспрямовану 2 антени, комутатор каналів 3, перший 4 і другий 5 приймачі, блок пеленгації 6, двоканальний комутатор 7 і автокомпенсатор 8. У поляризаційний пристрій заглушення завад також входять порогові елементи 9 і 10, схема И 11, тригер 12 і синхронізатор 13. Один з виходів дуально - поляризованної антени 1 підключений до входу першого приймача 4. 4 Вхід др угого приймача 5 через комутатор каналів 3 з'єднаний або з другим виходом дуально - поляризованної антени, або з виходом всеспрямованої антени 2. Входи приймачів 4 і 5 з'єднані з входами блоку пеленгації 6, а виходи - через двоканальний комутатор 7 підключені до входів автокомпенсатора 8, вихід якого є сигнальним виходом пристрою. Перший вихід блоку пеленгації 6 є виходом виміряного пеленга на постановник завад, а другий вихід з'єднаний із сигнальним входом першого 9 і опорним входом другого 10 порогових елементів. Виходи порогових елементів 9 і 10 з'єднані з першим і другим входами схеми И II, третій вхід якої приєднаний до інверсного виходу тригера 12, а вихід - підключений до входу установки нуля тригера 12. Інформаційний вхід тригера 12 з'єднаний з виходом другого порогового елемента 10, керувальний вхід - з одним з виходів синхронізатора 13, а вихід - з керуючим входом двоканального комутатора 7. Розглянемо роботу описаного пристрою. Після випромінювання зондувального імпульсу передавача РЛС переходить у режим прийому відбитих сигналів. Прийняті гостроспрямованою дуально поляризованою антеною 1 луна - сигнали і завади через комутатор каналів 3, перший 4 і другий 5 приймачі і двоканальний комутатор 7 надходять на основний і компенсаційний входи автокомпенсатора 8. При рівності інтенсивностей завадових сигналів на входах автокомпенсатора 8 (що реалізується в першому особливому базисі), або при перевищенні завади в компенсаційному каналі автокомпенсатора 8, у поляризаційному пристрої реалізується висока якість заглушення завад. У розглянутій ситуації, при рівності інтенсивностей завадових сигналів у каналах або при підвищенні завади на вході другого (компенсаційного) приймача 5, на виході блоку пеленгації 6 сигнал відсутній. При збільшенні рівня завадового сигналу на вході першого приймача 4 щодо входу другого приймача 5 ефективність заглушення завад в автокомпенсаторі 8, зменшується, а на другому виході блоку пеленгації з'я вляється сигнал, що збільшується по мірі збільшення різниці рівнів сигналів у каналах прийому. До моменту появи сигналу на другому ви ході блоку пеленгації 6 другий пороговий елемент 10, на опорний вхід якого подається вихідний сигнал блоку пеленгації 6, формує сигнал Х2 з рівнем логічної одиниці (див. Фіг. 2). Цей рівень у моменти, обумовлені керуючим сигналом, що надходить із синхронізатора 13, записується в тригер 12. При цьому двоканальний комутатор 7 знаходиться у вихідному стійкому U стані. Після досягнення вихідним сигналом l блоку пеленгації 6 рівня, що дорівнює значенню порога U1 на виході першого порогового елемента 9 (сигнал XI), відбувається перехід з рівня логічний «0» на рівень логічна «1». При цьому сигнал на виході схеми И11 не формується, і стан тригера 12, обумовлений вихідним сигналом другого порогового елемента 10, залишається попереднім (одиничним). Після досягнення вихідним сигналом блоку пеленгації 6 рівня, що дорівнює значенню 5 26490 порога U2 , на виході другого порогового елемента 10 формується рівень логічний «0». Через інформаційний вхід тригера 12 сигнал з рівнем логічний «0» записується в тригер 12 і змінює стан двоканального комутатора 7. При цьому інтенсивність завад на вході основного каналу автокомпенсатора 8 залишається менше, ніж на вході компенсаційного, а, відповідно, ефективність заглушення завад зростає. При подальшому збільшенні різниці рівнів сигналів на входах блоку пеленгації 6 двоканальний комутатор 7 знаходиться в цьому стані (див. Фіг. 2). При зменшенні рівня завадового сигналу на вході першого приймача 4 щодо вхідного сигналу другого приймача 5 (чи при флуктуаціях вихідного сигналу блоку пеленгації 6) порушується нерівність Ul ñU2 (див. Фіг. 2) і на виході другого порогового елемента 10 відбувається перехід з рівня логічний «0» до рівня логічна «1». Однак, при цьому на виході тригера 12 продовжує формуватися рівень логічний «0». Це пояснюється тим, що в момент спрацьовування другого порогового елемента 10 на усіх входах схеми И11 формуються рівні логічної «1», на її виході також виникає одиничний рівень, що встановлює тригер 12 у нульовий стан. При подальшому зменшенні відносного рівня завадового сигналу на вході першого приймача 4 порушується умова Ul ñU1 , при цьому на виході першого порового елемента 9 відбувається перехід з рівня логічної «1» до рівня логічний «0». У цьому випадку на виході схеми И11 формується низький рівень, і при надходженні імпульсу синхронізації на виході тригера 12 встановлюється одиничний рівень, що повертає двоканальний комутатор 7 у вихідний стан. Епюри керуючих сигналів, що характеризуються гистере 6 зисом переключення, у залежності від збільшення (зменшення) вихідного сигналу блоку пеленгації 6 Ul приведені на Фіг. 3. Причому, стрілками, спрямованими вправо і вниз, показана динаміка зміни сигналів, керуючих роботою двоканального комутатора 7, при відносному збільшенні рівнів сигналів на вході приймача 4. Стрілками, спрямованими вліво і вгору, показана динаміка зміни керуючи х сигналів при зменшенні рівня завадового сигналу на вході приймача 4. На неробочій ділянці дистанції (тобто протягом інтервалу часу, коли інформація, що міститься в луна - сигналах, у РЛС не використовується) із пристрою синхронізації 13 надходить сигнал (імпульс), по якому комутатор 3 підключає на компенсаційний вхід блоку пеленгації 6 всеспрямовану антену 2. При цьому, відповідно до відомого алгоритму роботи блоку пеленгації, в РЛС може визначатися кутове положення (пеленг) постановника активної завади. Розбіжність рівнів включення і вимикання двоканального комутатора 7, що досягається шляхом введення в поляризаційний пристрій заглушення завад другого порогового елемента 10, схеми И11 і тригера 12, дозволяє виключити невизначеність стану двоканального комутатора 7 в околі спрацьовування порогового елемента 9. Виключення багаторазового переключення двоканального комутатора 7, що виникає, наприклад, під впливом флуктуацій вихідного сигналу блоку пеленгації 6, дозволяє позбутися циклічних перехідних процесів в автокомпенсаторі 8, і, як наслідок, підвищити ефективність заглушення завадових сигналів. Використання пропонованого поляризаційного пристрою заглушення завад дозволить на один два порядка підвищити ефективність заглушення завад в околі переходу радіотехнічних пристроїв в ортогональний по поляризації режим роботи. 7 Комп’ютерна в ерстка Д. Шев ерун 26490 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPolarization device for suppressing interferences
Автори англійськоюPiza Dmytro Makarovych, Zalevskyi Oleksii Pavlovych
Назва патенту російськоюПоляризационное устройство для подавления помех
Автори російськоюПиза Дмитрий Макарович, Залевский Алексей Павлович
МПК / Мітки
МПК: G01S 7/36
Мітки: заглушення, завад, поляризаційний, пристрій
Код посилання
<a href="https://ua.patents.su/4-26490-polyarizacijjnijj-pristrijj-zaglushennya-zavad.html" target="_blank" rel="follow" title="База патентів України">Поляризаційний пристрій заглушення завад</a>
Поляризаційний пристрій заглушення завад
Номер патенту: 24090
Опубліковано: 25.06.2007
Автори: Піза Дмитро Макарович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 7/36
Мітки: завад, заглушення, поляризаційний, пристрій
Формула / Реферат:
Поляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пеленгаційний пристрій, входи якого підключені до виходів першого і другого каналів прийому, який відрізняється тим, що в нього додатково введені пристрій керування і комутатор каналів, керуючий вхід якого підключений до...
Пристрій контролю коефіцієнта заглушення завад
Номер патенту: 24118
Опубліковано: 25.06.2007
Автори: Траілін Вячеслав Федорович, Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: H04B 15/00, G01S 7/40
Мітки: завад, пристрій, заглушення, коефіцієнта, контролю
Формула / Реферат:
Пристрій контролю коефіцієнта заглушення завад, що містить індикатор і з'єднані послідовно комутатор, детектор і інтегратор, який відрізняється тим, що в нього додатково введені лінія затримки і з'єднані послідовно другий комутатор, перший пристрій вибірки і збереження, блок обчислення відношення, другий пристрій вибірки і збереження і блок керування, причому вихід лінії затримки підключений до входу першого комутатора, вихід інтегратора...
Пристрій бабурова для заглушення імпульсних завад
Номер патенту: 76428
Опубліковано: 15.08.2006
Автор: Бабуров Едуард Федорович
МПК: H04B 1/62
Мітки: пристрій, завад, імпульсних, бабурова, заглушення
Формула / Реферат:
Пристрій для заглушення імпульсних завад, що містить послідовно сполучені широкосмуговий підсилювач, перший обмежувач і вузькосмуговий підсилювач, який відрізняється тим, що вихід першого обмежувача сполучено з входом вузькосмугового підсилювача через введені послідовно включені передспотворюючий фільтр, другий обмежувач і коректор, причому коректор і передспотворюючий фільтр виконані з взаємооберненими амплітудно-частотними...
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: активних, адаптивної, завад, пристрій, компенсації, шумових
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Пристрій захисту від завад
Номер патенту: 25805
Опубліковано: 27.08.2007
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович
МПК: G01S 7/36
Мітки: захисту, завад, пристрій
Формула / Реферат:
Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, перший суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу першого суматора, вихід якого є виходом пристрою, а також синхронізатор, підключений до другого входу...
Попередній патент: Зубчаста передача
Наступний патент: Спосіб навчання
Випадковий патент: Спосіб визначення тріщиностійкості твердих сплавів, керамічних матеріалів та покриттів