Спосіб вимірювання моменту інерції ротора електричних машин
Номер патенту: 27658
Опубліковано: 12.11.2007
Автори: Ведміцький Юрій Григорович, Кухарчук Василь Васильович


Формула / Реферат
Спосіб вимірювання моменту інерції ротора електричних машин шляхом вимірювань в режимі самогальмування з зразковим моментом інерції та без нього, який відрізняється тим, що вимірюють проміжки часу з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості, за результатами часових вимірювань знаходять значення моменту інерції ротора об'єкта вимірювання за формулою:
![]()
де ![]() - момент інерції об'єкта вимірювання;
- момент інерції об'єкта вимірювання;
![]() - зразковий момент інерції;
- зразковий момент інерції;
![]() - проміжок часу в режимі самогальмування з зразковим моментом інерції;
- проміжок часу в режимі самогальмування з зразковим моментом інерції;
![]() - проміжок часу в режимі самогальмування без зразкового моменту інерції.
- проміжок часу в режимі самогальмування без зразкового моменту інерції.
Текст
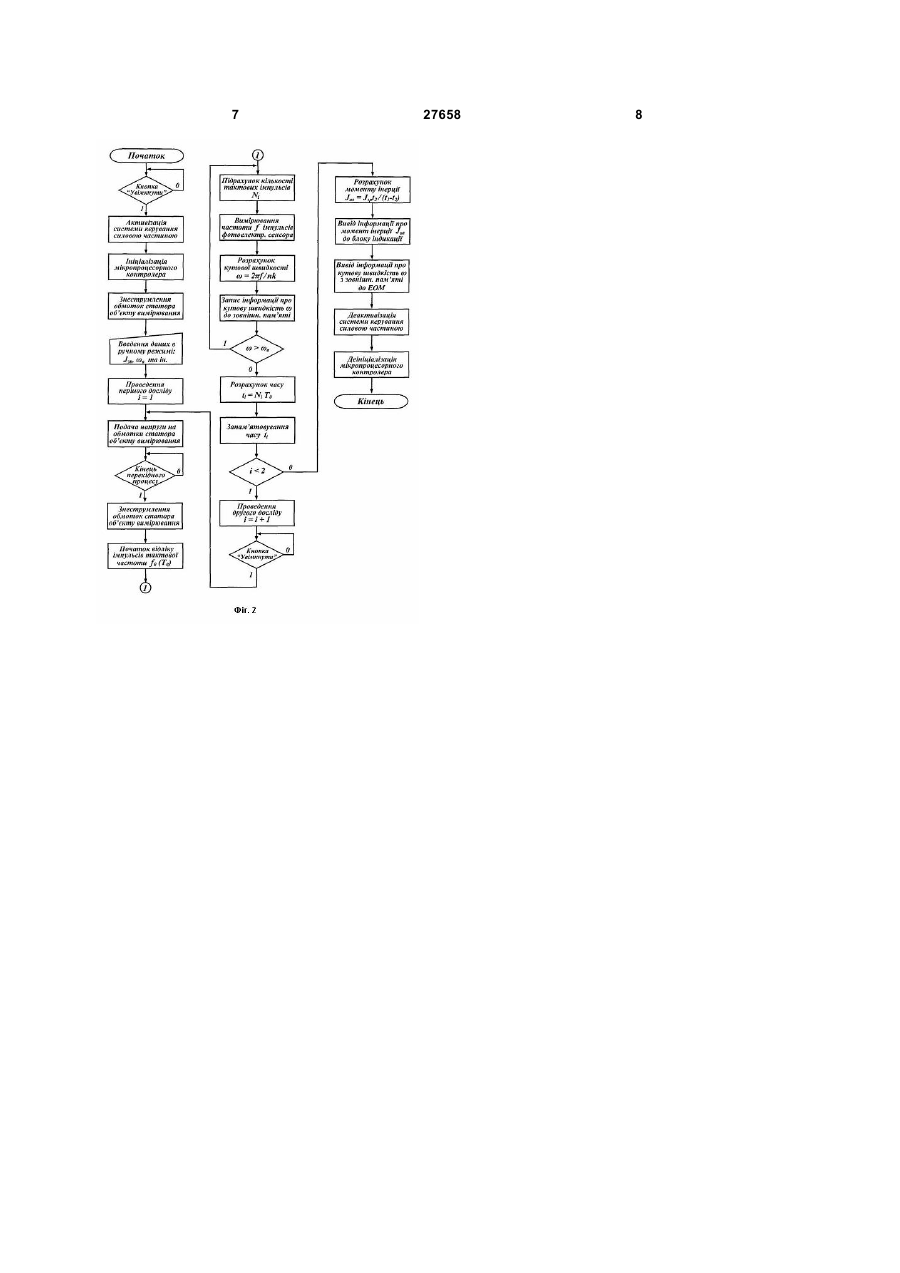
Спосіб вимірювання моменту інерції ротора електричних машин шляхом вимірювань в режимі самогальмування з зразковим моментом інерції та без нього, який відрізняється тим, що вимірюють проміжки часу з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості, за результатами часових вимірювань знаходять значення моменту інерції ротора об'єкта вимірювання за формулою: Корисна модель належить до вимірювальної техніки і може знайти застосування для вимірювання моменту інерції ротора електричних машин. Відомий спосіб визначення моменту інерції ротора електричних машин - спосіб крутильних коливань [див. Потапов Л.А., Зотин В.Ф. Испытания микроэлектродвигателей в переходних режимах. - М.: Энергоатомиздат, 1986. - С.87-90]. Суть способу полягає в тому, що в двох дослідах: першому - зі зразковим моментом інерції, а в другому - з ротором, проводять вимірювання періодів Т1 і Т2 малих крутильних коливань ротора двигуна, який знаходиться у вертикально підвішеному на стальному дроті положенні та здійснює попередньо наданий йому самогальмівний крутильний коливальний рух. Визначають момент інерції ротора Jов за формулою: T Jов= Jзр 2 , (1) T1 де Jзр - момент інерції зразкового тіла, T1 період коливань зразкового тіла, Т2 - період коливань ротора, момент інерції якого визначають. Суттєвими недоліками цього способу є велика трудомісткість, низька швидкодія та руйнівний підхід, що унеможливлює автоматизацію процесу визначення моменту інерції. Найбільш близьким технічним рішенням є спосіб вимірювання моменту інерції електричних машин [див. Поджаренко В.О., Кучерук В.Ю., Гоменюк А.С. Новий спосіб визначення моменту інерції електричних машин // Автоматизація технологічних процесів та промислова екологія, 1997, випуск №1. - С.23-27]. Суть способу полягає в тому, що проводять вимірювання кутових прискорень x1 та x2 ротора з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості wв двох дослідах: першому - зі зразковим моментом інерції Jзр, а в другому - без нього. За результатами вимірювань прискорень величину моменту інерції ротора Joв знаходять за формулою: x1 Jов = Jзр . (2) x2 - x1 Недоліками прототипу є невисока швидкодія (час розрахунку приблизно 5 хвилин) і низька точність, що зумовлені наявністю в способі операції цифрового диференціювання. В основу корисної моделі поставлено задачу створення способу вимірювання моменту інерції J ов = J зр де t2 , t1 - t 2 J ов - момент інерції об'єкта вимірювання; J зр - зразковий момент інерції; t1 - проміжок часу в режимі самогальмування з зразковим моментом інерції; UA (11) 27658 (13) U - проміжок часу в режимі самогальмування зразкового моменту інерції. (19) t2 без 3 ротора електричних машин, в якому за рахунок використання особливостей перехідного процесу під час режиму самогальмування електромеханічної системи 1-го порядку з одним ступенем вільності забезпечується підвищення точності вимірювань та їх швидкодії. Поставлена задача досягається тим, що в способі вимірювання моменту інерції ротора електричних машин в режимі самогальмування спочатку зі зразковим моментом інерції, а потім без нього, вимірюють проміжки часу з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості сов, за результатами часових вимірювань значення моменту інерції ротора знаходять за формулою: t1 Jов = Jзр , (3) t 2 - t1 де Jов - момент інерції об'єкта вимірювання; Jзр - зразковий момент інерції; t1 - проміжок часу в режимі самогальмування зі зразковим моментом інерції; t2 - проміжок часу в режимі самогальмування без зразкового моменту інерції. На Фіг.1 зображено схему пристрою для реалізації способу вимірювання моменту інерції ротора електричних машин, на Фіг.2 наведено етапи здійснення способу. Пристрій, який дозволяє реалізувати запропонований спосіб вимірювання моменту інерції ротора електричних машин, являє собою мікропроцесорний засіб вимірювання (Фіг.1), який складається з 1 - електричного двигуна (об'єкту вимірювання), 2 - системи керування силовою частиною, 3 - кнопки "Увімкнути", 4 - формувача сигналу, 5 - букво-цифрового терміналу, 6 прецизійного редуктора, 7 - демпферної муфти, 8 фотоелектричного перетворювача кутових переміщень, 9 - мікропроцесорного контролера, 10 - формувача сигналу фотоелектричного сенсора кутових переміщень, 11 - основи корпусу, 12 системного блоку зовнішньої ЕОМ, 13 енергонезалежної постійної пам'яті, 14 - блоку індикації, 15 - монітору зовнішньої ЕОМ. При цьому прецизійний редуктор 6 містить першу та другу шестерні, перша шестерня якого закріплена на валу досліджуваного електричного двигуна 1, а друга шестерня з'єднана з демпферною муфтою 7, що закріплена на валу фотоелектричного сенсора 8. Всі блоки, які містять рухомі частини, жорстко кріплені до основи корпусу 11, призначеної для надання механічної міцності пристрою. Мікроконтролер 9 є попередньо запрограмованим за алгоритмом, основу якого складає запропонований спосіб вимірювання моменту інерції. Програма міститься у внутрішній пам'яті мікроконтролера. Останній з'єднаний з іншими блоками через 8-розрядні порти А, В, С, D. Блок енергонезалежної зовнішньої постійної пам'яті 13, а також системний блок 12 і монітор 15 зовнішньої ЕОМ є додатковими блоками, що розширюють можливості пристрою та підвищують точність вимірювання моменту інерції за рахунок підвищення якості обробки первинної інформації. 27658 4 Спосіб вимірювання моменту інерції ротора електричних машин здійснюється наступним чином. Після того, як натиснута кнопка "Увімкнути" 3, формувач сигналу 4, який запобігає помилковому спрацюванню пристрою через "деренчання контактів" та з інших причин, формує сигнал, що активізує систему керування силовою частиною 2. Остання вихідним виводом 1 ініціалізує мікропроцесорний контролер 9, який переходить до виконання програми, що прописана у його внутрішній пам'яті. Відповідно до програми мікропроцесорний контролер 9 передусім перевіряє стан об'єкту вимірювання 1 і, у разі потреби, через систему керування силовою частиною 2 (вхідний вивід 3) приводить його до вихідного стану, характерною ознакою якого є відсутність обертового руху ротора через повне знеструмлення об'єкту вимірювання 1, а також за допомогою блоку індикації 14 та букво-цифрового терміналу 5 проводить опитування персоналу та отримання додаткової первинної інформації. До цієї інформації обов'язково необхідно віднести значення величини моменту інерції зразкового тіла Jзр, задане значення кутової швидкості сов, при досягненні якої часовий відлік t1 та t2 має припинитися, а також деяка інша додаткова інформація. У разі відсутності активності з боку персоналу щодо означення зразкового моменту інерції пристрій переходить в режим очікування, а в подальшому через визначений час відбувається дезактивація пристрою в цілому. У випадку ж з кутовою швидкістю wв у разі відсутності попередньої інформації мікропроцесорна система задає її значення самостійно. Після сформування первинної інформації мікропроцесорний контролер 9 через систему керування силовою частиною 2 (вхідний вивід 2) вмикає електричний двигун 1 і контролює за допомогою фотоелектричного перетворювача кутових переміщень 8 та формувача сигналу 10 кутову швидкість його ротора. Це здійснюється наступним чином: обертання вала ротора електричного двигуна 1 призводить до обертання обох шестерень прецизійного редуктора 6, що в свою чергу спричиняє обертання демпферної муфти 7, яка передає механічний момент, створений досліджуваним електричним двигуном 1, на вал фотоелектричного перетворювача кутових переміщень 8. На першому і другому виводах останнього формуються імпульси прямокутної p ± 2 (знак "+" чи "-" форми з різницею фаз залежить від напряму обертання вала об'єкта дослідження 1). На третьому виході створюється сигнал референтної мітки після кожного повного оберту вала. Ці сигнали через на формувач 10, що узгоджує параметри сигналів, надходять до мікропроцесорного контролера 9, в якому за алгоритмом частотоміра здійснюється визначення миттєвої частоти цієї послідовності прямокутних імпульсів, що в результаті попереднього перетворення кутової швидкості w ротора в частоту f відповідно до функції перетворення є 5 27658 прямопропорційною кутовій швидкості ротора електричної машини. Через визначений час після завершення перехідного процесу мікро-контролер 9 переходить до режиму самогальмування, відповідно до якого через систему керування силовою частиною 2 (вхідний вивід 3) відбувається знеструмлення об'єкту вимірювання 1 та відлік часу t1 у випадку досліду зі зразковим моментом інерції або часу t2 - без нього шляхом підрахунку внутрішнім лічильником мікропроцесорного контролера 9 послідовності імпульсів тактової частоти із заздалегідь відомим періодом (імпульсів тактової частоти). Підрахунок відбувається з моменту початку режиму самогальмування до моменту часу, коли кутова швидкість ротора не досягне заданого мінімального значення. Після проведення двох дослідів із зразковим моментом інерції та без нього мікропроцесорний контролер 9 за запропонованою формулою (4) розраховує момент інерції ротора електричного двигуна 1, інформація про що надходить до блоку індикації 14. Під час проведення дослідів із зразковим моментом інерції і без нього інформація про миттєву кутову швидкість записується до зовнішньої енергонезалежної постійної пам'яті 13 з метою залучення до розрахунково-аналітичного процесу зовнішньої ЕОМ (блоки 12 і 15) для розширення аналітичних можливостей пристрою та підвищення якості обробки інформації. Система перетворювача моменту інерції 1-го порядку підпорядковується рівнянню Лагранжа другого роду: d æ dWк ö dWк dWn dФ ç ÷= + Qj , & dt ç dj ÷ dj dj dj è & ø (4) & де ер - повний кут обертання ротора; j кутова швидкість; W к, Wn, Ф - відповідно повна кінетична і потенціальна енергії та функція розсіювання електромеханічної системи; Qj узагальнена зовнішня сила. Враховуючи, що в режимі самогальмування: 1 & Wк = Jj2, 2 Wn=0, (5) 1 & Ф = b j2 , 2 Qj=0, відповідно до (4) диференціальне рівняння руху системи буде мати вигляд: dw (6) J + bw = 0, dt де J - повний момент інерції обертової частини системи, b - узагальнений коефіцієнт розсіювання. З врахуванням незалежної початкової умови: M w(0 + ) = , (7) b де М - обертальний момент на момент знеструмлення системи, розв'язком диференціального рівняння (6) буде 6 b M -Jt (8) e . b Після проведення двох дослідів зі зразковим моментом інерції і без нього на підставі (8) отримаємо систему рівнянь w= b ì t M J +J 1 ï w = e ов зр , ï b ï (9) í b ï M - J ов t 2 ïw = e , ï b î з якої і випливає остаточна формула (3) для розрахунку моменту інерції ротора електричної машини t J ов = J зр 2 t1 - t 2 . Моменти часу t1 і t2 визначаємо шляхом підрахунку кількості імпульсів N1 та N2 тактової частоти f0 з періодом Т0 від початку досліду до досягнення ротором в обох випадках кутової швидкості wв t1=N1T0, (10) t2=N2T0. Для визначення кутової швидкості w ротора електричної машини застосовуємо її перетворення в частоту f послідовності прямокутних імпульсів фотоелектричного сенсора кутових переміщень з функцією перетворення nk (11) f= w, 2p де n - кількість міток фотоелектричного перетворювача кутових переміщень 8, k передаточне число прецизійного редуктора 6 та залучаємо мікропроцесорний контролер 9 з режимом роботи за алгоритмом частотоміра. 7 27658 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the moment of inertia of a rotor of an electric machine
Автори англійськоюVedmitskyi Yurii Hryhorovych, Kukharchuk Vasyl Vasyliovych
Назва патенту російськоюСпособ определения момента инерции ротора электрической машины
Автори російськоюВедмицкий Юрий Григорьевич, Кухарчук Василий Васильевич
МПК / Мітки
МПК: G01L 3/10
Мітки: електричних, інерції, машин, вимірювання, спосіб, моменту, ротора
Код посилання
<a href="https://ua.patents.su/4-27658-sposib-vimiryuvannya-momentu-inerci-rotora-elektrichnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання моменту інерції ротора електричних машин</a>
Спосіб визначення моменту інерції ротора асинхронноі машини
Номер патенту: 31973
Опубліковано: 15.12.2000
Автори: Кухарчук Василь Васильович, Козловський Андрій Володимирович
МПК: G01L 3/00
Мітки: машини, визначення, моменту, інерції, асинхронноі, ротора, спосіб
Текст:
...ротора. На фіг. 1 представлено графічне зображення перехідних процесів у перетворювачі без урахування перехідних процесів у ОВ та з урахуванням цих перехідних процесів, на фіг. 2 зображено схему пристрою для реалізації способу, на фіг. З зображено алгоритм виконання способу, на фіг. 4 зображені часові діаграми роботи процесорного засобу вимірювання моменту інерції. Пристрій, який дозволяє реалізувати запропонований спосіб визначення пускового...
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: моменту, спосіб, визначення, інерції, ротора
Формула / Реферат:
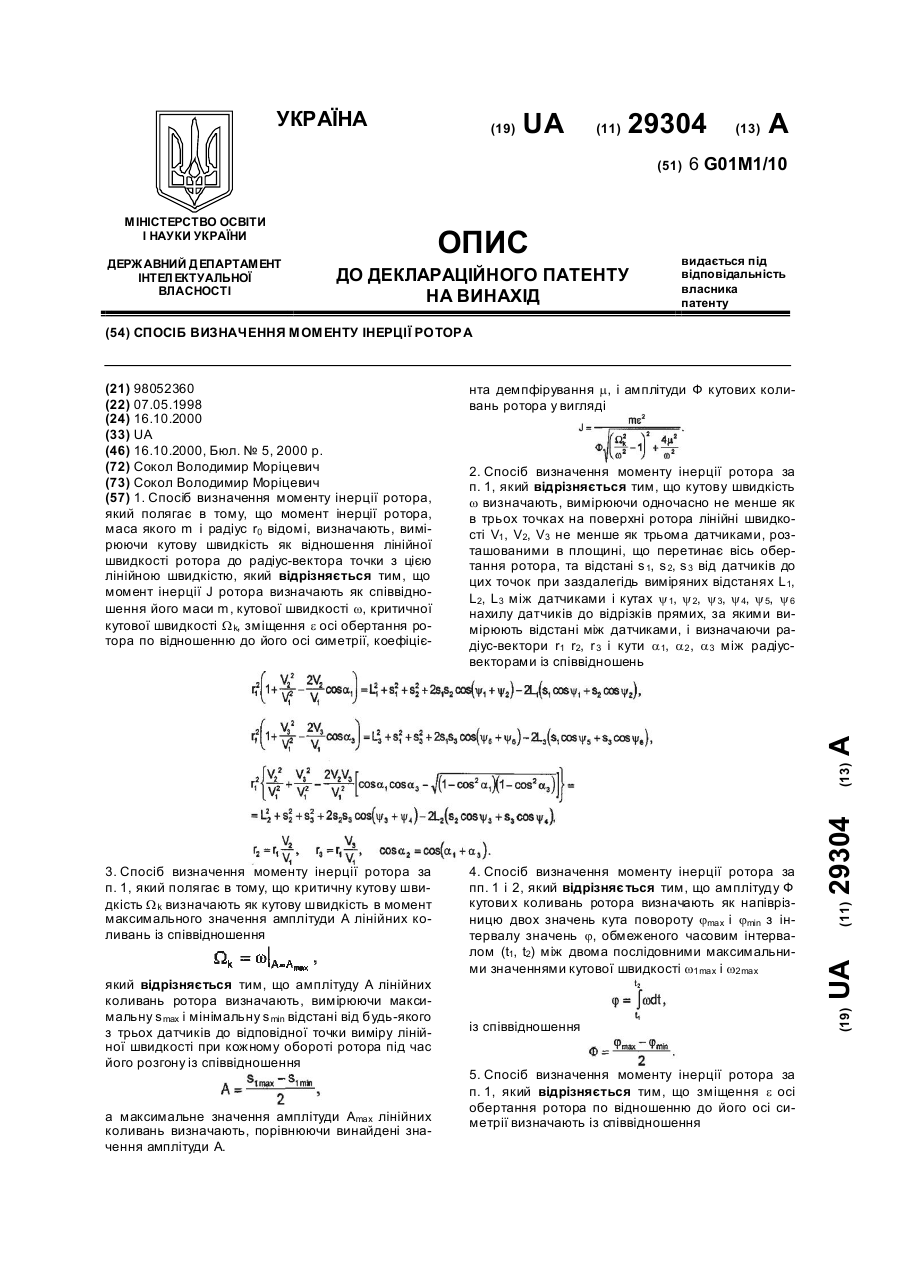
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кучерук Володимир Юрійович, Кухарчук Василь Васильович, Поджаренко Андрій Володимирович, Кулаков Павел Ігоревич
МПК: G01M 1/10
Мітки: приведеного, моменту, спосіб, механізму, визначення, інерції
Формула / Реферат:
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Система ізоляції обмотки статора або ротора електричних машин з тяжкими умовами експлуатації
Номер патенту: 3267
Опубліковано: 15.11.2004
Автори: Ткачук Микола Миколайович, Ткачук Олександр Миколайович, Каїка Василь Васильович
МПК: H02K 15/00
Мітки: електричних, ізоляції, тяжкими, експлуатації, ротора, система, машин, статора, обмотки, умовами
Формула / Реферат:
Спосіб ізоляції обмотки статора або ротора електричних машин, який відрізняється тим, що в паз статора або ротора закладають пазові коробочки з ізоляційного матеріалу на основі поліамідної плівки, в пазові коробочки вкладають обмотку з емальованого провідника високої надійності та теплостійкості, а між лобовими частинами обмотки закладають ізоляційні прокладки з того ж матеріалу, що і пазові коробочки, після чого обмотку просочують еластичною...
Пристрій вимірювання кута вибігу ротора синхронних машин
Номер патенту: 66405
Опубліковано: 17.05.2004
Автор: Агамалов Олег Миколайович
МПК: H02P 9/10
Мітки: вибігу, синхронних, машин, пристрій, ротора, кута, вимірювання
Формула / Реферат:
Пристрій вимірювання кута вибігу ротора синхронних машин, що вимірює кут між віссю магнітних полюсів ротора та віссю обертового магнітного поля статора і складається з датчиків та електронної схеми вимірювання, який відрізняється тим, що як датчики використані два датчика Холла, що мають загальні кола живлення та розташовані в просторі робочого зазору синхронної машини між статором та ротором під кутом
Попередній патент: Захисний пристрій від викидів шлаку і металу з сталеплавильних конвертерів
Наступний патент: Захисна конструкція для холодильника або шафи-вітрини з охолодженням
Випадковий патент: Пристрій для зчитування інформації з магнітного носія