Спосіб визначення моменту інерції ротора асинхронноі машини
Номер патенту: 31973
Опубліковано: 15.12.2000
Автори: Козловський Андрій Володимирович, Кухарчук Василь Васильович
Текст
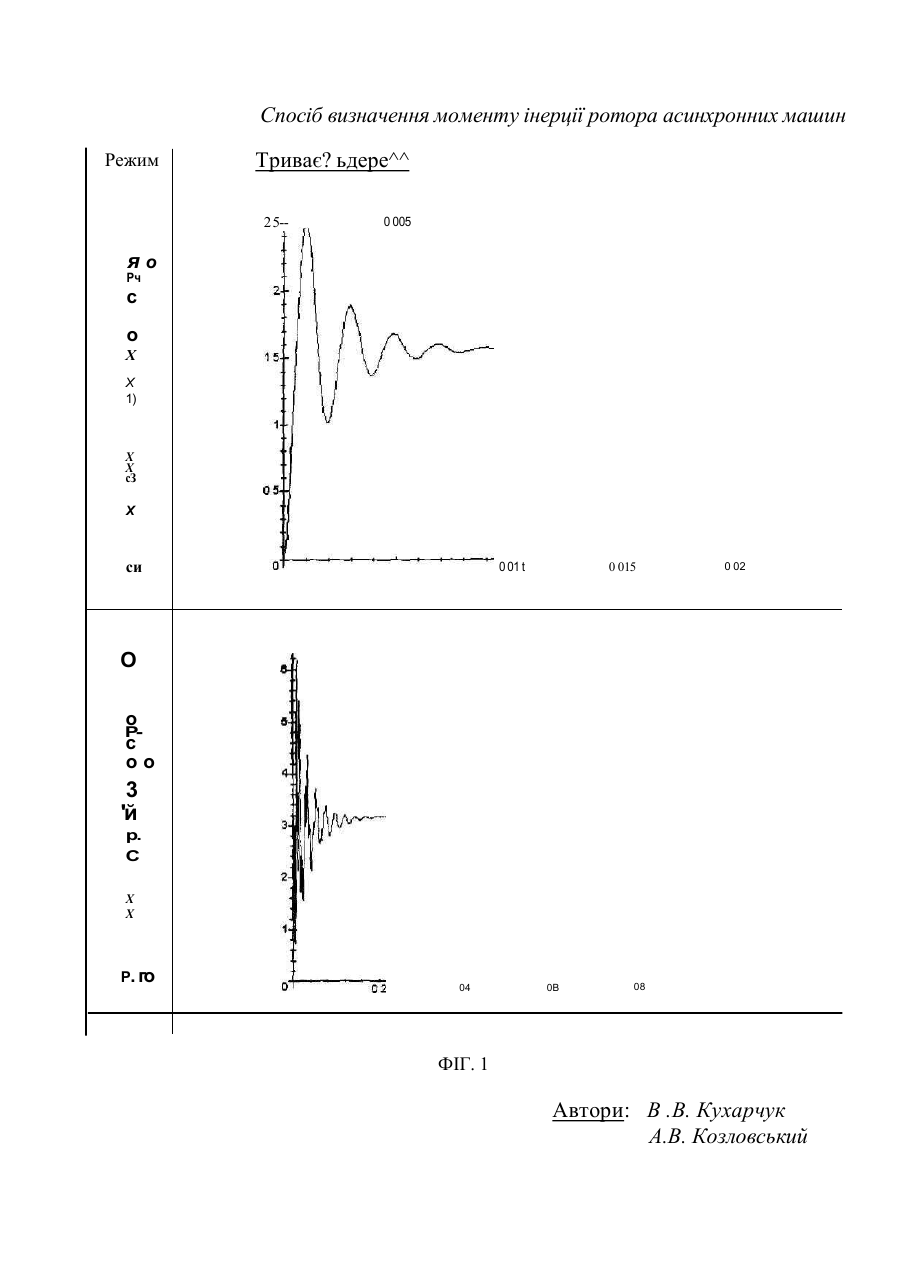
6 МПК,кл. G01 L3/10 СПОСІБ ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ РОТОРА АСИНХРОННИХ МАШИН Винахід відноситься до вимірювальної техніки і може знайти застосування для вимірювання моменту інерції ротора асинхронних машин. Момент інерції ротора є однією з найбільш важливих характеристик електричної машини, що визначає ЇЇ динамічні властивості. Відомий спосіб визначення моменту інерції ротора асинхронних мікромашин, який має назву - метод крутильних коливань (див. Потапов Л.А., Зотин В.Ф. Испытания микроэлектродвигателей в переходних режимах. - М.: Энергоатомиздат, 1986. - С. 87-90.). Суть метода полягає в тому, що ротор двигуна підвішують у вертикальному положенні на стальному дроті і приводять його в крутильний коливальний рух. При цьому визначається період малих крутильних коливань, який потім порівнюють з періодом коливань зразкового тіла з відомим моментом інерції. Визначають момент інерції J0B за формулою: т J OB =j J .(!*) П) 3 І ^р І » W де J3 - момент інерції зразкового тіла; Т3 - період коливань зразкового тіла; Тх - період коливань ротора, момент інерції якого визначають. Якщо ротор, момент інерції якого визначають, встановлено на призмі і він коливається, як фізичний маятник, то за періодом коливань маятника Т знаходять момент інерції ротора J0B за формулою: J -°^ЇІ J OB . ? (2) ' 4 -лГ де G - вага ротора; а - відстань центру тяжіння від осі обертання. V } -2 Недоліками цього способу є велика трудомісткість, низька швидкодія та точність, а також необхідність розбирання електричної машини, що принципово не дозволяє автоматизувати процес визначення інформативного параметра. Найбільш близьким технічним рішенням є спосіб визначення моменту інерції асинхронних мікромашин (див. Поджаренко В.О., Кучерук В.Ю., Гоменюк А.С. Новий спосіб визначення моменту інерції електричних машин // Автоматизація технологічних процесів та промислова екологія, 1997, випуск №1. С. 23-27). Суть відомого способу полягає в тому, що момент інерції ротора визначають сукупними вимірюваннями кутової швидкості cor з підключеним до ротора об'єкту вимірювання зразкового моменту інерції і без нього. В результаті двох вимірів Шг в режимі самогальмування отримують систему двох рівнянь з двома невідомими, розв'язком якої знаходять величину моменту інерції. Спільною ознакою прототипу та винаходу є визначення моменту інерції опосередкованим шляхом (за допомогою додаткових розрахунків). До недоліків прототипу можна віднести низьку швидкодію (час розрахунку приблизно 5 хвилин) та неможливість повної автоматизації процесу визначення моменту інерції. В основу винаходу поставлено задачу розробки способу визначення моменту інерції асинхронних машин, в якому, шляхом застосування особливостей досліду "короткого замикання", перехідних процесів двигуна та введенням нових операцій, забезпечується підвищення точності вимірювань та швидкодії. При цьому досягаються споживчі якості, спрямовані на підвищення точності вимірювань шляхом зменшення методичної похибки та автоматизацію процесу визначення моменту інерції. Спосіб дозволяє значно зменшити методичну похибку та дає змогу реалізувати повністю автоматизовану методику визначення моменту інерції за короткий час. Спосіб визначення моменту інерції ротора асинхронної машини, полягає в формуванні на обмотці її статора прямокутного імпульсу номінальної напру -зги, тривалість якого перевищує час перехідного процесу перетворювача, та в гальмуванні валу ротора через вимірювальний важіль сенсором зусилля, який відрізняється тим, що при заживлених обмотках статора, після завершення перехідного процесу в перетворювачі, вимірюють момент Мк, а після обезструмлення обмоток вимірюють час tS заспокоєння вільних коливань ротора і величину моменту інерції JOB знаходять за формулою: t°-P J =_____ X±JL ____ (3) о *С / де Р - коефіцієнт заспокоєння; g - постійна тяжіння; Kl - функція перетворення сенсора зусилля; С - жорсткість сенсора зусилля; 6 - нормована величина, що характеризує момент закінчення вільних коливань ротора. На фіг. 1 представлено графічне зображення перехідних процесів у перетворювачі без урахування перехідних процесів у ОВ та з урахуванням цих перехідних процесів, на фіг. 2 зображено схему пристрою для реалізації способу, на фіг. З зображено алгоритм виконання способу, на фіг. 4 зображені часові діаграми роботи процесорного засобу вимірювання моменту інерції. Пристрій, який дозволяє реалізувати запропонований спосіб визначення пускового моменту електродвигуна, представляє собою мікропроцесорний засіб вимірювання, який складається з об'єкту вимірювання 1, ротор якого через вимірювальний важіль 2 діє на вимірювальний перетворювач 3, який складається з сенсора зусилля 4, та двох перетворювачів 5 та 6, детектора з пристроєм виділення огинаючої 7, компаратора 8, вимірювача тривалості перехідного процесу, який складається з тригера 9 та електронного лічильника 10, пристрою живлення ОВ 13 та мікропроцесорної вимірювальної системи 12. Вимірювальна система 12 складається із спеціалізованого мікропроцесора i80C196KR - 13, регістра адреси - 14; постійної пам'яті - 15; оперативної пам'яті - 16; керуючого регістра - 17; формувача - 18; кнопки "Пуск" - 19 та генератора зразкової частоти - 20. -4 Пристрій для вимірювання пускового моменту електродвигуна працює таким чином (алгоритм див. на фіг. 3). Після того, як натиснена кнопка "Пуск" - 19, вимірювальна система переходить до виконання програми, яка прописана в постійній пам'яті 15. В регістрі 17 (розряди 0...3) формується сигнал NOB, ЯКИЙ перетворюється в на пругу живлення (UA, UB, UС) перетворювачем 11 та подається на OB 1. Очікується перехідний процес. На один з входів компаратора 8 подається нормоване значення похибки 6. Вимірюється величина моменту Мк, яка фіксується в оперативній пам'яті 16. Далі вимірювальна система 12 в регістрі 17 (розряд 4) формує сигнал Start та обезструмлює обмотки статора ОВ. Починається перехідний процес вільних затухаючих коливань ротора. Пристрій виділення огинаючої 7 перетворює сигнал з виходу ВП у постійну напругу UQ, яка за допомогою компаратора 8 порівнюється з похибкою U6, і, якщо UQ > U6, то лічильник 10 рахує кількість імпульсів зразкової частоти fo. Сигнал з виходу 10 реєструється на аналоговому вході мікропроцесора 13. Як тільки UQ = U6, тригер 9 закривається, що свідчить про кінець вимірювання U. Часові диаграми вимірювання tS наведені на фіг. 4. Суть методу полягає в наступному. В момент підключення напруги живлення на роторі об'єкту вимірювання (ОВ) при сковзанні (S - 1) створюється обертаючий момент: 2- я • f • ((Rl + R2)2 + (XI + X2)2) де р - кількість пар полюсів ОВ; m - кількість фаз статора ОВ; f - частота поля статора; XI, Х2 - індуктивний опір фаз статора та ротора; R1, R2 - активний опір статора та ротора; U номінальна напруга живлення ОВ; -5 Цей момент Мк через вимірювальний важіль діє на сенсор зусилля (СЗ), який є пружним елементом. Виникає перехідний процес, тривалість якого дорівнює tl. Після закінчення перехідного процесу (t - tl), OB обезструмлюють (U = 0) і момент на виході перетворювача, внаслідок інерційних властивостей СЗ, зменшується від Мк до нуля протягом проміжку часу t2. Оскільки ротор ОВ здійснює вільні затухаючі коливання, тривалість яких зумовлена величиною моменту інерції ротора JOB і жорсткістю сенсора зусилля С, то вимірюючи величини Mk, t2 та знаючи С, стає можливим знаходження моменту інерції ротора об'єкту вимірювання. Скористаємося засадами теорії електромеханічного вимірювального перетворення (див. Кухарчук В.В. Оцінка динамічних метрологічних характеристик засобу вимірювання пускового моменту // В кн.: "Контроль і управління в технічних системах КУТС-97" за матеріалами МНТК. - Вінниця, 1997, т. 2 С148-155.) і отримаємо диференціальне рівняння, що описує фізичні процеси в перетворювачі під час заживления та обезструмлення ОВ із загальним ротором: dt2 dt ~— [O,t>t де J = (JOB + JBB) - момент інерції ротора ОВ та вимірювального важіля. Перетворимо (5) до загальновживаного вигляду і матимемо лінійне неоднорідне диференціальне рівняння з постійними коефіцієнтами: 'b , 0 s t s t i 0, t > t Р де є«----- /== - ступінь заспокоєння вільних коливань; 2VC77 С ш = J ----частота вільних коливань перетворювача; b = —- - стала моменту. ,.ч -6 Отримаємо розв'язок рівняння (6), скориставшись засадами вищої математики (див. Высшая математика /Под. ред. П.Ф. Овчинникова. - К. Выща школа, 1989. - 679 с.) у вигляді: ш 1-е ,t
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of moment of inertia of rotor of asynchronous machine
Автори англійськоюKukharchuk Vasyl Vasyliovych, Kozlovskyi Andrii Volodymyrovych
Назва патенту російськоюСпособ определения момента инерции ротора асинхронной машины
Автори російськоюКухарчук Василий Васильевич, Козловский Андрей Владимирович
МПК / Мітки
МПК: G01L 3/00
Мітки: визначення, машини, ротора, асинхронноі, інерції, спосіб, моменту
Код посилання
<a href="https://ua.patents.su/11-31973-sposib-viznachennya-momentu-inerci-rotora-asinkhronnoi-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення моменту інерції ротора асинхронноі машини</a>
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: ротора, моменту, інерції, спосіб, визначення
Формула / Реферат:
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...
Спосіб визначення моменту інерції тіла складної форми
Номер патенту: 23958
Опубліковано: 31.08.1998
Автори: Горлов Олег Петрович, Богарсуков Сергій Іванович, Чечельницький Станіслав Борисович, Карабан Володимир Миколайович, Нечуйвітер Леонід Іванович, Гаркуша Павло Миколайович
МПК: G01M 1/10
Мітки: тіла, інерції, визначення, спосіб, форми, моменту, складної
Формула / Реферат:
Способ определения момента инерции тела сложной формыс учетом трения при свободных затухающих колебаниях физического и нитяного маятников, включающий вычисление периодов колебаний как для испытуемого тела или изделия, так и для эталона, близкого к телу или изделию по геометрии, на одном и том же маятнике с одними и теми же элементами крепления, отличающийся тем, что маятники отклоняют на угол не менее 8° и при совершении ими свободных...
Спосіб визначення пускового моменту електродвигуна
Номер патенту: 30884
Опубліковано: 15.12.2000
Автори: Поджаренко Володимир Олександрович, Кухарчук Василь Васильович, Козловський Андрій Володимирович
МПК: G01L 3/10
Мітки: пускового, моменту, визначення, спосіб, електродвигуна
Формула / Реферат:
Спосіб визначення пускового моменту електродвигуна шляхом вимірювання поточного значення пускового моменту на його роторі у кожному кутовому положенні, відрізняється тим, що ротор випробуваного двигуна обертають зовнішнім приводним кроковим двигуном в покроковому режимі причому перехід з попереднього кутового положення в наступне здійснюють після закінчення перехідного процесу в перетворювачі, тривалість якого знаходять за...
Спосіб визначення моменту розкриття прес-форми машини лиття під тиском
Номер патенту: 7418
Опубліковано: 29.09.1995
Автори: Лигоцький Ігор Леонідович, Сорокін Микола Олександрович, Церковницький Микола Сергійович, Богушевський Володимир Святославович
МПК: B22D 17/32
Мітки: моменту, визначення, тиском, розкриття, прес-форми, спосіб, машини, лиття
Формула / Реферат:
Способ определения момента раскрытия пресс-формы машины литья под давлением, преимущественно при производстве деталей из сплавов, имеющих фазовые превращения при температурах ниже температуры солидуса, включающий введение расплавленного металла известной температуры в полость пресс-формы, кристаллизацию его, измерение температуры в точке пресс-формы и удаление затвердевшей отливки при снижении температуры на 5-10°С ниже температуры фазового...
Ротор асинхронної електричної машини з короткозамкнутою обмоткою
Номер патенту: 5766
Опубліковано: 29.12.1994
Автор: Бондарев Віктор Миколайович
МПК: H02K 17/16
Мітки: машини, ротор, короткозамкнутою, обмоткою, асинхронної, електричної
Формула / Реферат:
(57) Ротор асинхронной электрической машины с короткозамкнутой обмоткой, содержащий шихтованный сердечник с грушевидными пазами одинакового поперечного сечения и формы, одни из которых обращены к внешней поверхности сердечника широкой стороной, а другие - узкой стороной, и короткозамкнутую обмотку, о т-личающийся тем, что указанные пазы расположены по периметру ротора симметрично с чередованием, по меньшей мере, через один паз.
Попередній патент: Спосіб визначення кількості живих сперміїв в еякулятах бугаїв
Наступний патент: Спосіб прогнозування розвитку гіпертонічної хвороби
Випадковий патент: Спосіб лікування внутрішньочерепних крововиливів