Гідростатично-аеростатичний опорний вузол
Номер патенту: 31194
Опубліковано: 25.03.2008
Автори: Струтинський Сергій Васильович, Яхно Олег Михайлович
Формула / Реферат
Гідростатично-аеростатичний опорний вузол, що містить рухому ділянку осі або вала, навколо якої розташовані в необхідній кількості упорні підшипники, поверхні яких утворюють з поверхнею осі або вала дросельні щілини гідростатичних або аеростатичних підшипників, причому розміри щілин регулюються в залежності від навантаження, що діє на вісь або вал, та мають в своїх центральних частинах кармани, підключені через дроселі до джерела стисненого робочого середовища, який відрізняється тим, що в центральних частинах упорних підшипників розміщені спеціальні вставки, торцеві поверхні яких утворюють з поверхнею осі або вала дросельну щілину, розмір якої менший середнього розміру щілини між поверхнею осі або вала і поверхнею упорного підшипника, а кармани гідростатичних підшипників розташовані в центральних частинах торцевих поверхонь вставок і кожний карман обмежено з однієї сторони рухомою поверхнею осі або вала, а з іншої сторони - поверхнею вставки, яка в даному місці являє собою пружну діафрагму, що розділяє порожнину кармана з порожниною підвідення стисненого робочого середовища від його джерела, причому дросельна щілина вставки виконана кільцевою і має діаметральні розміри по поверхні осі або вала, більші від діаметрального розміру діафрагми, при цьому по периметру упорного підшипника вузла встановлені нерухомі сопла, отвори яких розміщені опозитно напроти виходів щілин опорних ділянок, а осі сопел утворюють кут, менший 90°, із рухомою поверхнею осі або вала.
Текст
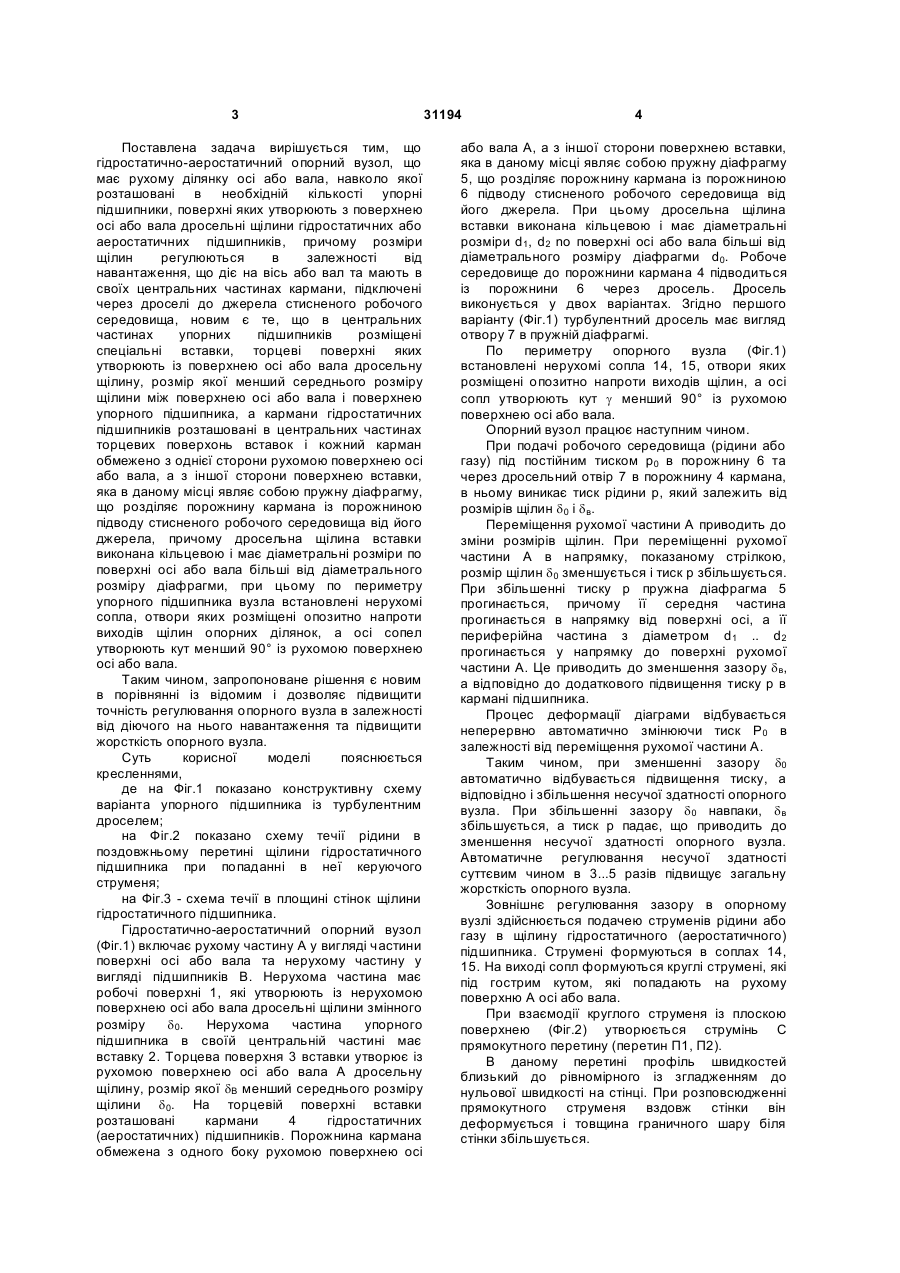
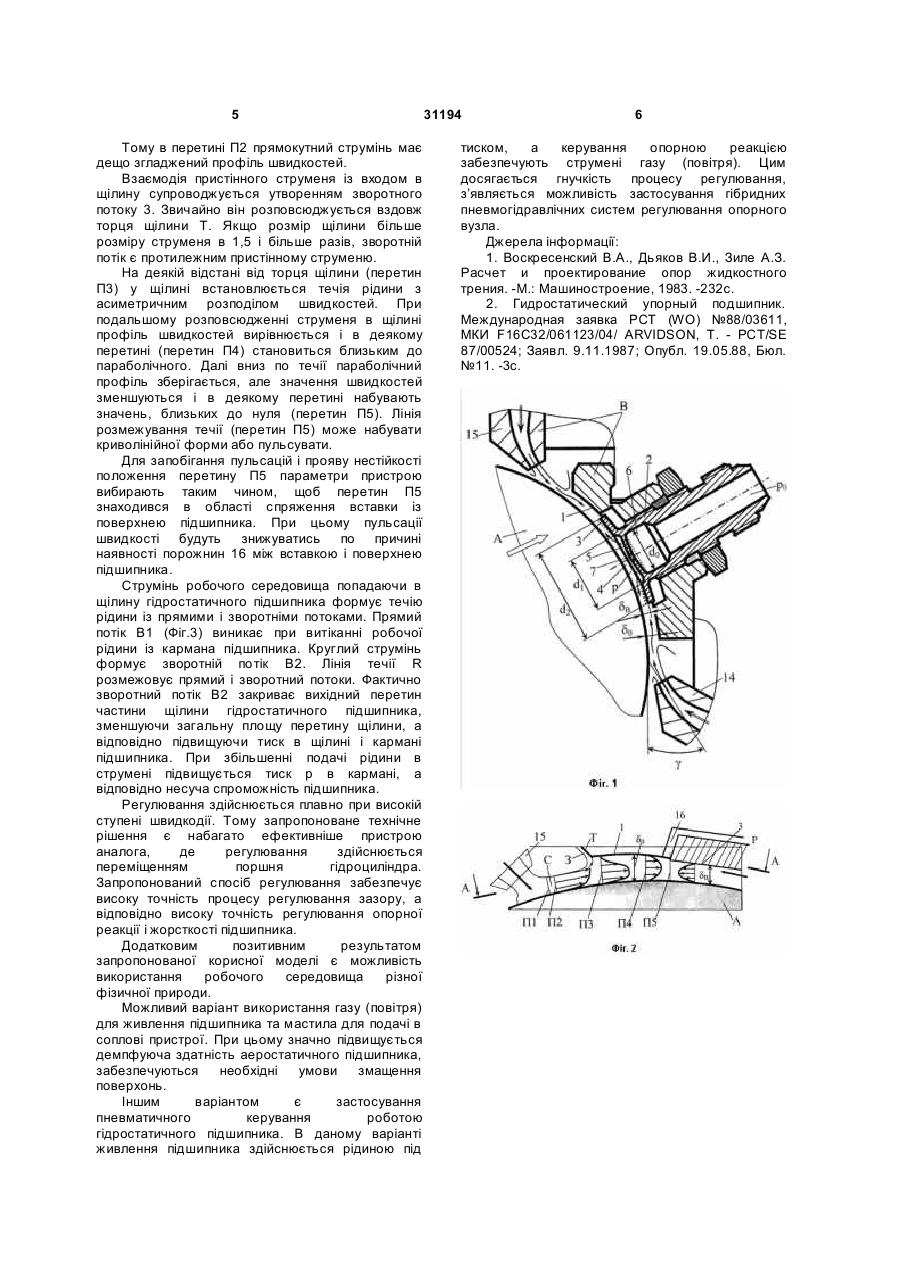
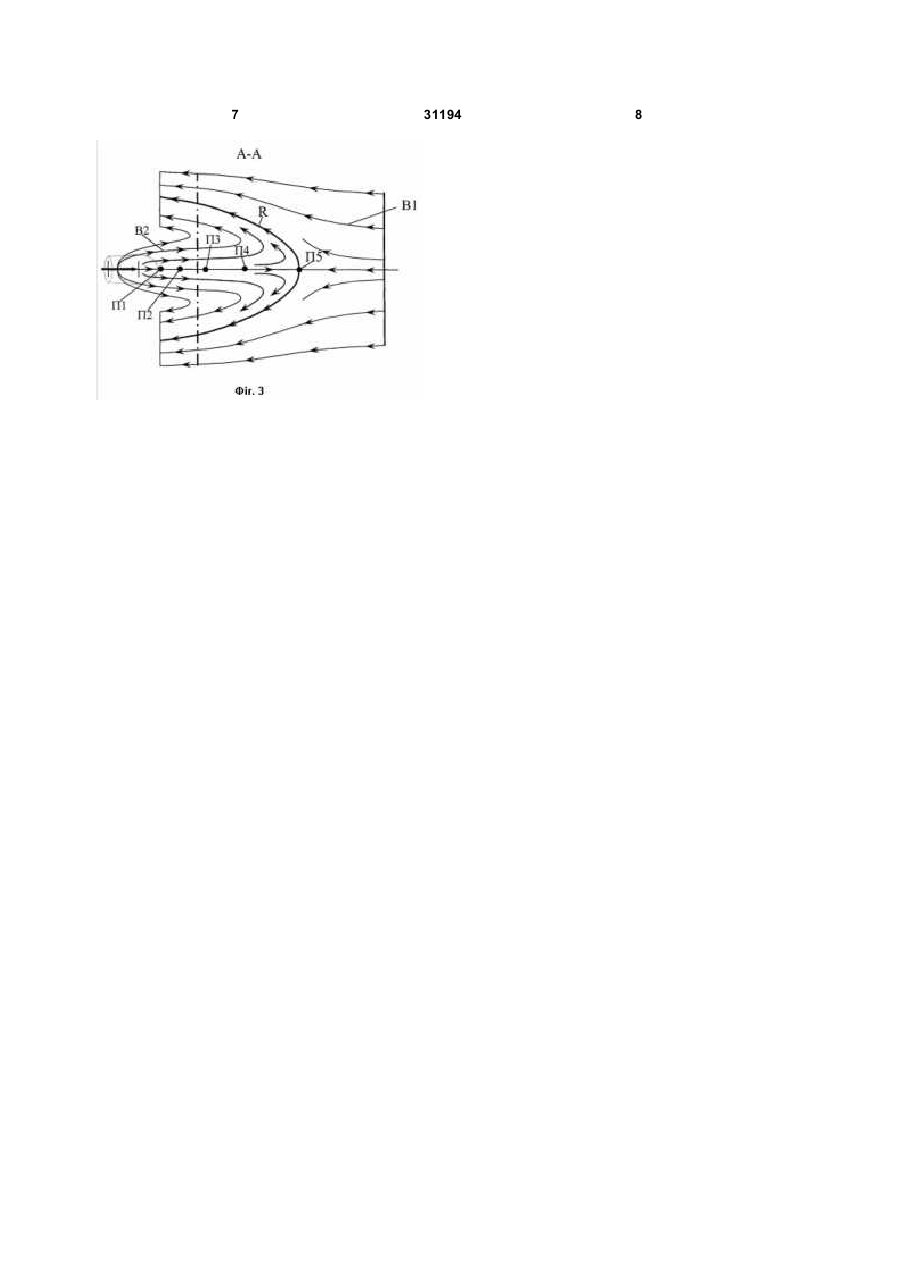
Гідростатично-аеростатичний опорний вузол, що містить рухому ділянку осі або вала, навколо якої розташовані в необхідній кількості упорні підшипники, поверхні яких утворюють з поверхнею осі або вала дросельні щілини гідростатичних або аеростатичних підшипників, причому розміри щілин регулюються в залежності від навантаження, що діє на вісь або вал, та мають в своїх центральних частинах кармани, підключені через дроселі до джерела стисненого робочого середовища, який відрізняється тим, що в центральних частинах упорних підшипників U 1 3 Поставлена задача вирішується тим, що гідростатично-аеростатичний опорний вузол, що має рухому ділянку осі або вала, навколо якої розташовані в необхідній кількості упорні підшипники, поверхні яких утворюють з поверхнею осі або вала дросельні щілини гідростатичних або аеростатичних підшипників, причому розміри щілин регулюються в залежності від навантаження, що діє на вісь або вал та мають в своїх центральних частинах кармани, підключені через дроселі до джерела стисненого робочого середовища, новим є те, що в центральних частинах упорних підшипників розміщені спеціальні вставки, торцеві поверхні яких утворюють із поверхнею осі або вала дросельну щілину, розмір якої менший середнього розміру щілини між поверхнею осі або вала і поверхнею упорного підшипника, а кармани гідростатичних підшипників розташовані в центральних частинах торцевих поверхонь вставок і кожний карман обмежено з однієї сторони рухомою поверхнею осі або вала, а з іншої сторони поверхнею вставки, яка в даному місці являє собою пружну діафрагму, що розділяє порожнину кармана із порожниною підводу стисненого робочого середовища від його джерела, причому дросельна щілина вставки виконана кільцевою і має діаметральні розміри по поверхні осі або вала більші від діаметрального розміру діафрагми, при цьому по периметру упорного підшипника вузла встановлені нерухомі сопла, отвори яких розміщені опозитно напроти виходів щілин опорних ділянок, а осі сопел утворюють кут менший 90° із рухомою поверхнею осі або вала. Таким чином, запропоноване рішення є новим в порівнянні із відомим і дозволяє підвищити точність регулювання опорного вузла в залежності від діючого на нього навантаження та підвищити жорсткість опорного вузла. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 показано конструктивну схему варіанта упорного підшипника із турбулентним дроселем; на Фіг.2 показано схему течії рідини в поздовжньому перетині щілини гідростатичного підшипника при попаданні в неї керуючого струменя; на Фіг.3 - схема течії в площині стінок щілини гідростатичного підшипника. Гідростатично-аеростатичний опорний вузол (Фіг.1) включає рухому частину А у вигляді частини поверхні осі або вала та нерухому частину у вигляді підшипників В. Нерухома частина має робочі поверхні 1, які утворюють із нерухомою поверхнею осі або вала дросельні щілини змінного розміру d 0. Нерухома частина упорного підшипника в своїй центральній частині має вставку 2. Торцева поверхня 3 вставки утворює із рухомою поверхнею осі або вала А дросельну щілину, розмір якої dВ менший середнього розміру щілини d 0. На торцевій поверхні вставки розташовані кармани 4 гідростатичних (аеростатичних) підшипників. Порожнина кармана обмежена з одного боку рухомою поверхнею осі 31194 4 або вала А, а з іншої сторони поверхнею вставки, яка в даному місці являє собою пружну діафрагму 5, що розділяє порожнину кармана із порожниною 6 підводу стисненого робочого середовища від його джерела. При цьому дросельна щілина вставки виконана кільцевою і має діаметральні розміри d1, d2 no поверхні осі або вала більші від діаметрального розміру діафрагми d0. Робоче середовище до порожнини кармана 4 підводиться із порожнини 6 через дросель. Дросель виконується у двох варіантах. Згідно першого варіанту (Фіг.1) турбулентний дросель має вигляд отвору 7 в пружній діафрагмі. По периметру опорного вузла (Фіг.1) встановлені нерухомі сопла 14, 15, отвори яких розміщені опозитно напроти виходів щілин, а осі сопл утворюють кут g менший 90° із рухомою поверхнею осі або вала. Опорний вузол працює наступним чином. При подачі робочого середовища (рідини або газу) під постійним тиском р0 в порожнину 6 та через дросельний отвір 7 в порожнину 4 кармана, в ньому виникає тиск рідини р, який залежить від розмірів щілин d 0 і d в. Переміщення рухомої частини А приводить до зміни розмірів щілин. При переміщенні рухомої частини А в напрямку, показаному стрілкою, розмір щілин d 0 зменшується і тиск р збільшується. При збільшенні тиску р пружна діафрагма 5 прогинається, причому її середня частина прогинається в напрямку від поверхні осі, а її периферійна частина з діаметром d1 .. d2 прогинається у напрямку до поверхні рухомої частини А. Це приводить до зменшення зазору d в, а відповідно до додаткового підвищення тиску р в кармані підшипника. Процес деформації діаграми відбувається неперервно автоматично змінюючи тиск Р0 в залежності від переміщення рухомої частини А. Таким чином, при зменшенні зазору d0 автоматично відбувається підвищення тиску, а відповідно і збільшення несучої здатності опорного вузла. При збільшенні зазору d 0 навпаки, d в збільшується, а тиск р падає, що приводить до зменшення несучої здатності опорного вузла. Автоматичне регулювання несучої здатності суттєвим чином в 3...5 разів підвищує загальну жорсткість опорного вузла. Зовнішнє регулювання зазору в опорному вузлі здійснюється подачею струменів рідини або газу в щілину гідростатичного (аеростатичного) підшипника. Струмені формуються в соплах 14, 15. На виході сопл формуються круглі струмені, які під гострим кутом, які попадають на рухому поверхню А осі або вала. При взаємодії круглого струменя із плоскою поверхнею (Фіг.2) утворюється струмінь С прямокутного перетину (перетин П1, П2). В даному перетині профіль швидкостей близький до рівномірного із згладженням до нульової швидкості на стінці. При розповсюдженні прямокутного струменя вздовж стінки він деформується і товщина граничного шару біля стінки збільшується. 5 Тому в перетині П2 прямокутний струмінь має дещо згладжений профіль швидкостей. Взаємодія пристінного струменя із входом в щілину супроводжується утворенням зворотного потоку 3. Звичайно він розповсюджується вздовж торця щілини Т. Якщо розмір щілини більше розміру струменя в 1,5 і більше разів, зворотній потік є протилежним пристінному струменю. На деякій відстані від торця щілини (перетин П3) у щілині встановлюється течія рідини з асиметричним розподілом швидкостей. При подальшому розповсюдженні струменя в щілині профіль швидкостей вирівнюється і в деякому перетині (перетин П4) становиться близьким до параболічного. Далі вниз по течії параболічний профіль зберігається, але значення швидкостей зменшуються і в деякому перетині набувають значень, близьких до нуля (перетин П5). Лінія розмежування течії (перетин П5) може набувати криволінійної форми або пульсувати. Для запобігання пульсацій і прояву нестійкості положення перетину П5 параметри пристрою вибирають таким чином, щоб перетин П5 знаходився в області спряження вставки із поверхнею підшипника. При цьому пульсації швидкості будуть знижуватись по причині наявності порожнин 16 між вставкою і поверхнею підшипника. Струмінь робочого середовища попадаючи в щілину гідростатичного підшипника формує течію рідини із прямими і зворотніми потоками. Прямий потік В1 (Фіг.3) виникає при витіканні робочої рідини із кармана підшипника. Круглий струмінь формує зворотній потік В2. Лінія течії R розмежовує прямий і зворотний потоки. Фактично зворотний потік В2 закриває вихідний перетин частини щілини гідростатичного підшипника, зменшуючи загальну площу перетину щілини, а відповідно підвищуючи тиск в щілині і кармані підшипника. При збільшенні подачі рідини в струмені підвищується тиск р в кармані, а відповідно несуча спроможність підшипника. Регулювання здійснюється плавно при високій ступені швидкодії. Тому запропоноване технічне рішення є набагато ефективніше пристрою аналога, де регулювання здійснюється переміщенням поршня гідроциліндра. Запропонований спосіб регулювання забезпечує високу точність процесу регулювання зазору, а відповідно високу точність регулювання опорної реакції і жорсткості підшипника. Додатковим позитивним результатом запропонованої корисної моделі є можливість використання робочого середовища різної фізичної природи. Можливий варіант використання газу (повітря) для живлення підшипника та мастила для подачі в соплові пристрої. При цьому значно підвищується демпфуюча здатність аеростатичного підшипника, забезпечуються необхідні умови змащення поверхонь. Іншим варіантом є застосування пневматичного керування роботою гідростатичного підшипника. В даному варіанті живлення підшипника здійснюється рідиною під 31194 6 тиском, а керування опорною реакцією забезпечують струмені газу (повітря). Цим досягається гнучкість процесу регулювання, з’являється можливість застосування гібридних пневмогідравлічних систем регулювання опорного вузла. Джерела інформації: 1. Воскресенский В.А., Дьяков В.И., Зиле А.З. Расчет и проектирование опор жидкостного трения. -М.: Машиностроение, 1983. -232с. 2. Гидростатический упорный подшипник. Международная заявка РСТ (WO) №88/03611, МКИ F16C32/061123/04/ ARVIDSON, Т. - РСТ/SE 87/00524; Заявл. 9.11.1987; Опубл. 19.05.88, Бюл. №11. -3с. 7 31194 8
ДивитисяДодаткова інформація
Назва патенту англійськоюHydrostatically-aerostatic support unit
Автори англійськоюYakhno Oleh Mykhailovych, Strutynskyi Serhii Vasyliovych
Назва патенту російськоюГидростатически-аэростатический опорный узел
Автори російськоюЯхно Олег Михайлович, Струтинский Сергей Васильевич
МПК / Мітки
МПК: F16C 32/06
Мітки: вузол, опорний, гідростатично-аеростатичний
Код посилання
<a href="https://ua.patents.su/4-31194-gidrostatichno-aerostatichnijj-opornijj-vuzol.html" target="_blank" rel="follow" title="База патентів України">Гідростатично-аеростатичний опорний вузол</a>
Аеростатичний опорний вузол

Номер патенту: 16264
Опубліковано: 29.08.1997
Автори: Ковтун Наталья Петрівна, Савенко Юрій Миколайович, П'ятилетов Іван Іванович, Рудик Юрій Микитович, Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович, Маросін Олег Петрович
МПК: F16C 32/06
Мітки: аеростатичний, вузол, опорний
Формула / Реферат:
1. Аэростатический опорный узел, содержащий корпус и образующие горизонтальную плоскую газовую опору основание и подвижную часть с цилиндрическим хвостовиком, карманами, отверстиями подвода газа с ограничителями его расхода и осевым каналом подвода сжатого газа, а также опорный узел для самоустановки корпуса и основной канал для подачи сжатого газа, отличающийся тем, что, с целью обеспечения обезвешива-ния опирающейся конструкции, он...
Опорний вузол бурильного станка

Номер патенту: 82143
Опубліковано: 11.03.2008
Автори: Данилюк Валерій Іванович, Полєтаєв Олександр Федорович
МПК: E21B 3/00, E21B 7/02, F16J 15/44
Мітки: бурильного, опорний, вузол, станка
Формула / Реферат:
1. Опорний вузол бурильного станка, що складається з траверзи, шпинделя, корпуса ущільнень, підшипників, нижньої гумової армованої манжети ущільнення шпинделя, щонайменше однієї верхньої комірцевої манжети ущільнення порожнини подачі водоповітряної суміші та щілинного ущільнення між шпинделем і корпусом ущільнень, розташованого за цією манжетою, який відрізняється тим, що між нижньою гумовою армованою манжетою ущільнення шпинделя і верхньою...
Опорний підшипниковий вузол

Номер патенту: 53751
Опубліковано: 17.02.2003
Автори: Гриценко Вячеслав Григорович, МАРЦИНКОВСЬКИЙ ВАСИЛЬ СІГІЗМУНДОВИЧ
МПК: F16C 32/06
Мітки: підшипниковий, вузол, опорний
Формула / Реферат:
1. Опорний підшипниковий вузол, що містить корпус з каналами підведення мастила та зливною порожниною, вал, самоустановлювальні колодки, що охоплюють вал, з виконаними в центральній частині їх робочої поверхні радіальним отвором та у вхідній і вихідній кромках - розподільними канавками, одна з яких, у вхідній кромці, сполучена через канали в тілі самоустановлювальної колодки з каналами підведення мастила, а інша, у вихідній кромці, виконана...
Опорний підшипниковий вузол (варіанти)
Номер патенту: 74963
Опубліковано: 15.02.2006
Автор: МАРЦИНКОВСЬКИЙ ВАСИЛЬ СІГІЗМУНДОВИЧ
МПК: F16C 32/00
Мітки: опорний, підшипниковий, варіанти, вузол
Формула / Реферат:
1. Опорний підшипниковий вузол, що містить корпус з каналами підведення мастила та зливною порожниною, вал, охоплений самоустановлюваними колодками, кожна з якихмає радіальний отвір, виконаний в центральній частині її робочої поверхні, та розподільні канавки, виконані у вхідній та вихідній кромках, кармани, фіксувальні гвинти, маслознімні скребки, установлені в міжколодковому просторі, який відрізняється тим, що кармани виконано на внутрішній...
Газостатичний опорний підшипниковий вузол
Номер патенту: 20914
Опубліковано: 15.02.2007
Автори: Щербак Юрій Георгійович, Тарабрін Олександр Іванович
МПК: F16C 32/00
Мітки: газостатичний, підшипниковий, опорний, вузол
Формула / Реферат:
Газостатичний опорний підшипниковий вузол, що містить цапфу вала, корпус з торцевими кришками та газостатичні підшипники кочення у вигляді рівномірно розташованих по колу навкруг цапфи вала несучих порожнистих роликів, розміщених із зазором на закріплених в торцевих кришках порожнистих осях з радіальними каналами, та систему подачі робочого середовища, що з`єднана за допомогою радіальних каналів з робочими зазорами підшипникового вузла, який...
Попередній патент: Газгольдер
Наступний патент: Енергоефективний спосіб керування відцентровою насосною установкою системи водопостачання
Випадковий патент: Багатоканальний лінійний індукційний прискорювач заряджених частинок