Спосіб автономного формування траєкторії літального апарата при посадці
Номер патенту: 32957
Опубліковано: 10.06.2008
Автори: Поляков Володимир Вадимович, Баришев Ігор Володимирович, Висоцький Олег Володимирович, Макаров Сергій Анатолійович, Коршець Олена Анатоліївна, Бабенко Олександр Іванович
Формула / Реферат
Спосіб автономного формування траєкторії літального апарата при посадці, у якому злітно-посадочну смугу (ЗПС) оснащують не менш як трьома радіолокаційними наземними орієнтирами (НО), які розміщують на поздовжній і поперечній осях симетрії ЗПС, літальний апарат (ЛА) виконує радіолокаційний огляд земної поверхні, виявляє сигнали від НО, за якими вимірюють відстані від ЛА до кожного з НО, бортовими засобами ЛА вимірюють висоту польоту, кути курсу, атаки і тангажу та швидкість руху ЛА, формують сигнали керування рухом ЛА у горизонтальній та вертикальній площинах, використовуючи ці дані виконують розрахунок курсового кута ЛА та кута нахилу глісади, який відрізняється тим, що керування посадкою ЛА проводять без застосування засобів передачі даних з Землі на борт ЛА, без інформації про місцеположення НО та курсового кута ЗПС, траєкторію посадки ЛА розглядають в просторі станів поверхонь положень із вертикальною твірною.
Текст
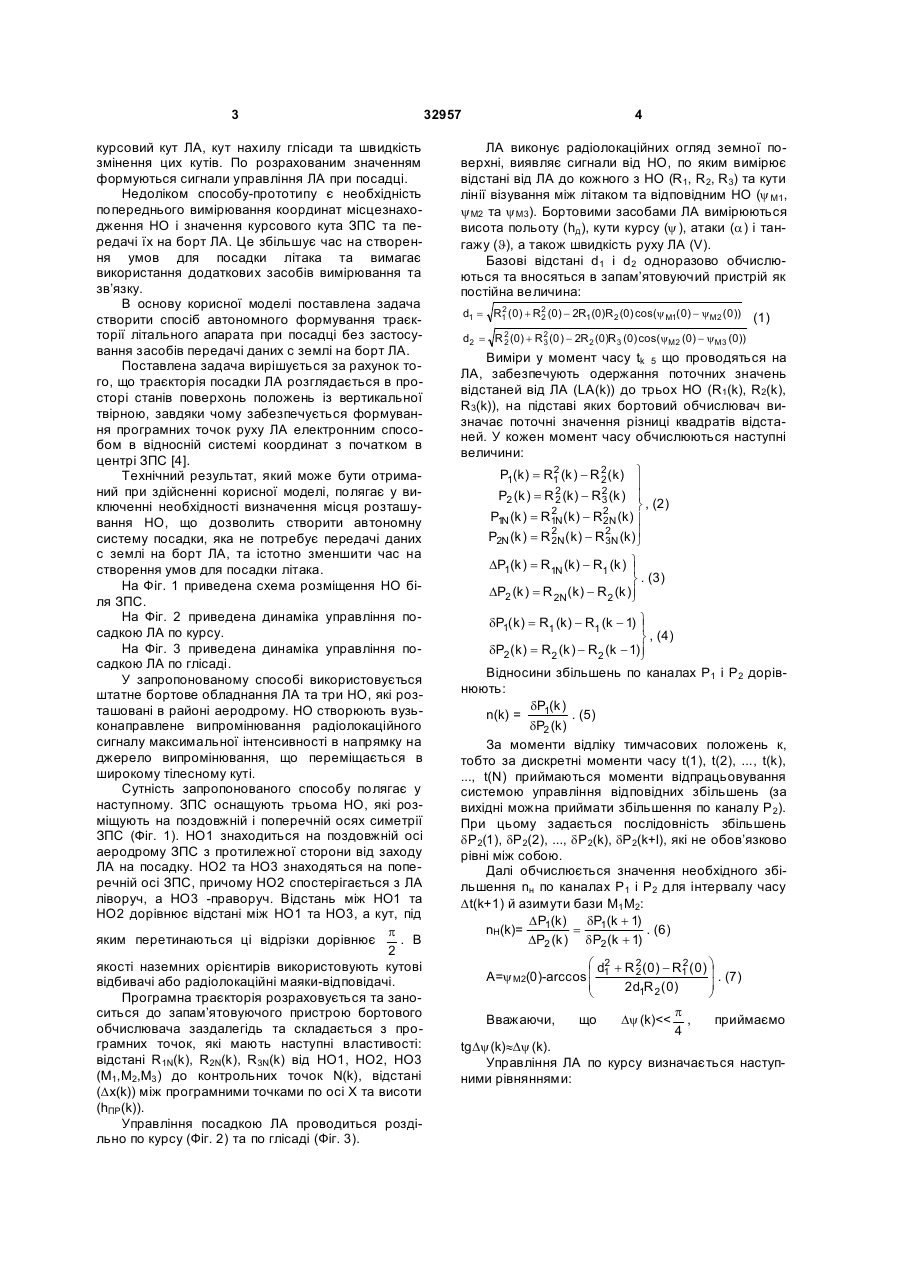
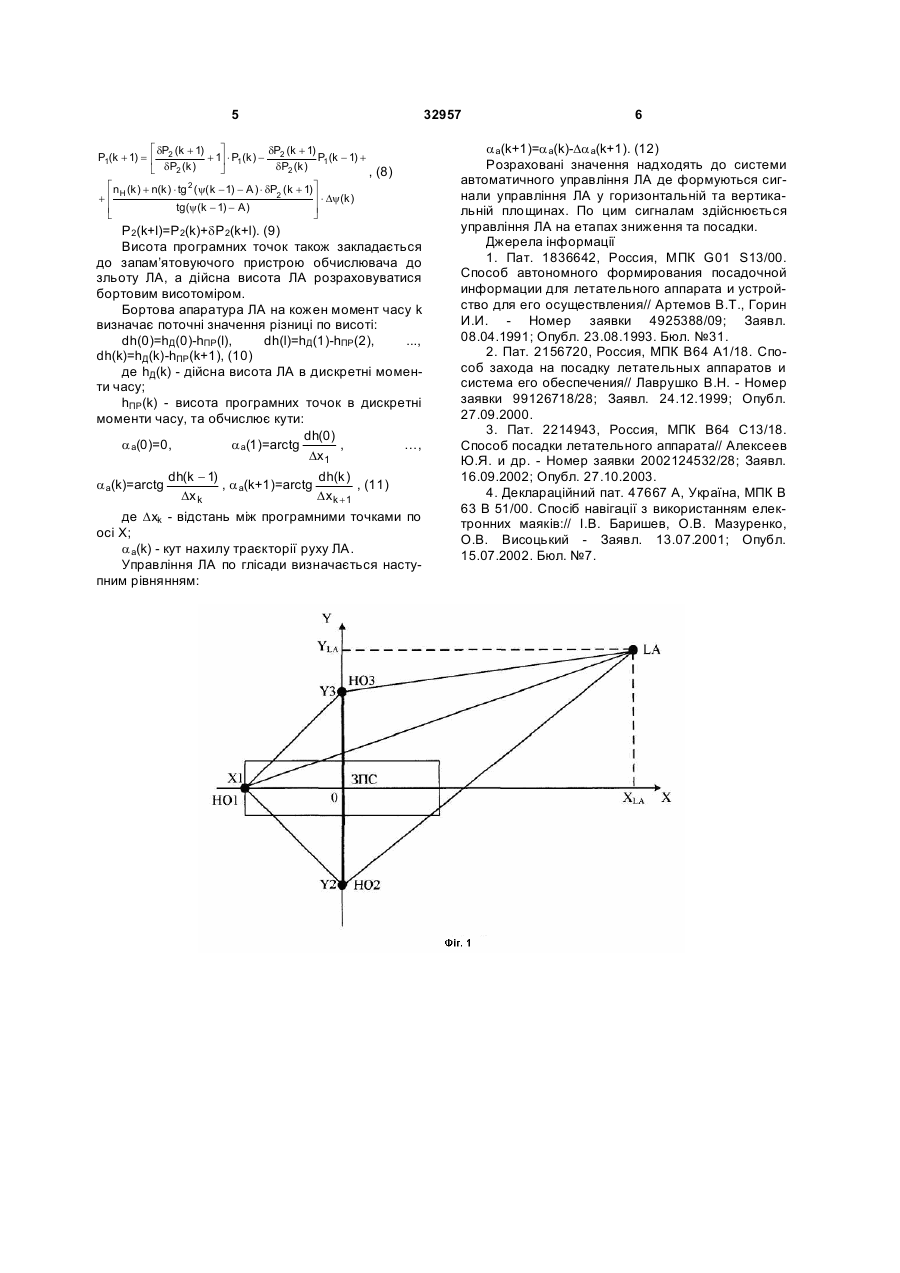
Спосіб автономного формування траєкторії літального апарата при посадці, у якому злітнопосадочну смугу (ЗПС) оснащують не менш як трьома радіолокаційними наземними орієнтирами (НО), які розміщують на поздовжній і поперечній 3 курсовий кут ЛА, кут нахилу глісади та швидкість змінення цих кутів. По розрахованим значенням формуються сигнали управління ЛА при посадці. Недоліком способу-прототипу є необхідність попереднього вимірювання координат місцезнаходження НО і значення курсового кута ЗПС та передачі їх на борт ЛА. Це збільшує час на створення умов для посадки літака та вимагає використання додаткових засобів вимірювання та зв’язку. В основу корисної моделі поставлена задача створити спосіб автономного формування траєкторії літального апарата при посадці без застосування засобів передачі даних с землі на борт ЛА. Поставлена задача вирішується за рахунок того, що траєкторія посадки ЛА розглядається в просторі станів поверхонь положень із вертикальної твірною, завдяки чому забезпечується формування програмних точок руху ЛА електронним способом в відносній системі координат з початком в центрі ЗПС [4]. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у виключенні необхідності визначення місця розташування НО, що дозволить створити автономну систему посадки, яка не потребує передачі даних с землі на борт ЛА, та істотно зменшити час на створення умов для посадки літака. На Фіг. 1 приведена схема розміщення НО біля ЗПС. На Фіг. 2 приведена динаміка управління посадкою ЛА по курсу. На Фіг. 3 приведена динаміка управління посадкою ЛА по глісаді. У запропонованому способі використовується штатне бортове обладнання ЛА та три НО, які розташовані в районі аеродрому. НО створюють вузьконаправлене випромінювання радіолокаційного сигналу максимальної інтенсивності в напрямку на джерело випромінювання, що переміщається в широкому тілесному куті. Сутність запропонованого способу полягає у наступному. ЗПС оснащують трьома НО, які розміщують на поздовжній і поперечній осях симетрії ЗПС (Фіг. 1). НО1 знаходиться на поздовжній осі аеродрому ЗПС з протилежної сторони від заходу ЛА на посадку. НО2 та НО3 знаходяться на поперечній осі ЗПС, причому НО2 спостерігається з ЛА ліворуч, а НО3 -праворуч. Відстань між НО1 та НО2 дорівнює відстані між НО1 та НО3, а кут, під p яким перетинаються ці відрізки дорівнює . В 2 якості наземних орієнтирів використовують кутові відбивачі або радіолокаційні маяки-відповідачі. Програмна траєкторія розраховується та заноситься до запам’ятовуючого пристрою бортового обчислювача заздалегідь та складається з програмних точок, які мають наступні властивості: відстані R1N(k), R2N(k), R3N(k) від HO1, HO2, НО3 (M1,M2,M3 ) до контрольних точок N(k), відстані (Dх(k)) між програмними точками по осі X та висоти (hПР(k)). Управління посадкою ЛА проводиться роздільно по курсу (Фіг. 2) та по глісаді (Фіг. 3). 32957 4 ЛА виконує радіолокаційних огляд земної поверхні, виявляє сигнали від НО, по яким вимірює відстані від ЛА до кожного з HO (R1, R2, R3) та кути лінії візування між літаком та відповідним НО (y М1, y М2 та y М3). Бортовими засобами ЛА вимірюються висота польоту (hд), кути курсу (y ), атаки (a) і тангажу (J), а також швидкість руху ЛА (V). Базові відстані d1 і d2 одноразово обчислюються та вносяться в запам’ятовуючий пристрій як постійна величина: 2 d1 = R1 ( 0) + R 2 (0) - 2R1(0)R 2 (0) cos(y M1( 0) - yM2 ( 0)) 2 (1) d2 = R 2 (0) + R 2 (0 ) - 2R 2 (0)R 3 (0) cos(yM2 (0) - yM3 (0)) 2 3 Виміри у момент часу tk 5 що проводяться на ЛА, забезпечують одержання поточних значень відстаней від ЛA (LA(k)) до трьох НО (R1(k), R2(k), R3(k)), на підставі яких бортовий обчислювач визначає поточні значення різниці квадратів відстаней. У кожен момент часу обчислюються наступні величини: 2 P1(k ) = R1 (k ) - R 2 ( k ) ü 2 ï P2 (k ) = R 2 (k ) - R2 (k ) ï 2 3 ý , (2) 2 P1N (k ) = R1N( k ) - R2N (k ) ï 2 P2N (k ) = R 2N( k ) - R2N (k ) ï 2 3 þ DP1(k ) = R1N (k) - R1 (k ) ü ï ý . (3) DP2 (k ) = R 2N( k) - R2 (k )ï þ dP1( k) = R1 (k) - R1 (k - 1) ü ï ý , (4) dP2 ( k) = R2 (k ) - R2 (k - 1)ï þ Відносини збільшень по каналах P1 і Р2 дорівнюють: dP1(k ) . (5) n(k) = dP2 (k ) За моменти відліку тимчасових положень к, тобто за дискретні моменти часу t(1), t(2), ..., t(k), ..., t(N) приймаються моменти відпрацьовування системою управління відповідних збільшень (за вихідні можна приймати збільшення по каналу Р 2). При цьому задається послідовність збільшень dP2(1), dP2(2), ..., dP2(k), dP2(k+l), які не обов’язково рівні між собою. Далі обчислюється значення необхідного збільшення nн по каналах Р1 і Р2 для інтервалу часу Dt(k+1) й азимути бази M1 M2: D P1(k ) dP1(k + 1) nH(k)= . (6) = DP2 (k ) d P2 (k + 1) 2 æ d2 + R 2 ( 0) - R1 ( 0) ö 2 ÷ . (7) А=y М2(0)-arccos ç 1 ç ÷ 2d1R 2 ( 0) è ø p Вважаючи, що Dy (k)
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of autonomous path generation of aircraft at landing
Автори англійськоюBaryshev Ihor Volodymyrovych, Poliakov Volodymyr Vadymovych, Vysotskyi Oleh Volodymyrovych, Makarov Serhii Anatoliiovych, Korshets Olena Anatoliivna, Babenko Oleksandr Ivanovych
Назва патенту російськоюСпособ автономного формирования траектории летательного аппарата при посадке
Автори російськоюБаришев Игорь Владимирович, Поляков Владимир Вадимович, Высоцкий Олег Владимирович, Макаров Сергей Анатольевич, Коршец Елена Анатольевна, Бабенко Александр Иванович
МПК / Мітки
МПК: B64C 13/00
Мітки: літального, формування, траєкторії, посадці, спосіб, автономного, апарата
Код посилання
<a href="https://ua.patents.su/4-32957-sposib-avtonomnogo-formuvannya-traehktori-litalnogo-aparata-pri-posadci.html" target="_blank" rel="follow" title="База патентів України">Спосіб автономного формування траєкторії літального апарата при посадці</a>
Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері і пристрій для його здійснення
Номер патенту: 70266
Опубліковано: 15.09.2004
Автори: Дронь Микола Михайлович, Пашков Анатолій Володимирович, Гринчишин Юрій Леонідович, Хорольський Петро Георгійович
МПК: B64G 1/00, F42B 15/00
Мітки: літального, пристрій, спосіб, апарата, траєкторії, ступеня, здійснення, спасіння, спуску, атмосфери
Формула / Реферат:
1. Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері, що полягає у прикладенні гальмуючого імпульсу аеродинамічними пристроями, зв'язаними із літальним апаратом нежорсткими елементами, який відрізняється тим, що після попадання літального апарата в атмосферу нежорсткі елементи, наприклад троси, звільняють від проміжних зв'язків із його корпусом, корпус розділяють на попередньо зв'язані цими тросами секції, наприклад...
Пристрій для контролю спрацьовування блокa реле тиску приймача статичного тиску літального апарата на висхідній гілці траєкторії при наземних випробуваннях
Номер патенту: 75677
Опубліковано: 15.05.2006
Автори: Дупліщева Ольга Михайлівна, Кулігін Анатолій Михайлович, Лепескин Ігор Борисович, Порубаймех Володимир Ілліч
МПК: G01C 5/00, G01L 27/00
Мітки: тиску, приймача, статичного, реле, блока, висхідній, траєкторії, спрацьовування, гілці, пристрій, контролю, випробуваннях, літального, апарата, наземних
Формула / Реферат:
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на висхідній гілці траєкторії польоту при наземних випробуваннях, який містить робочу камеру, вакуумметр, приймач статичного тиску й випробовуваний блок реле тиску, який відрізняється тим, що в ньому приймач статичного тиску містить електричний нагрівник, виконаний як ізольована від корпусу приймача статичного тиску спіраль, розташована навколо...
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях
Номер патенту: 80686
Опубліковано: 25.10.2007
Автори: Дупліщева Ольга Михайлівна, Порубаймех Володимир Ілліч, Лепескин Ігор Борисович, Кулігін Анатолій Михайлович
МПК: G01C 5/00, G01L 27/00, G01M 9/00
Мітки: статичного, траєкторії, блока, пристрій, тиску, приймача, польоту, спрацьовування, випробуваннях, літального, контролю, гілці, апарата, спадній, наземних, реле
Формула / Реферат:
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях, який містить робочу камеру, що має вакуумметр, приймач статичного тиску, випробуваний блок реле тиску, електричний нагрівник, що встановлено у вигляді спіралі, яка ізольована від корпусу приймача статичного тиску, термометр опору, датчик перепаду тиску, при цьому робоча камера...
Спосіб формування з неорієнтованого органічного скла елементів засклення ліхтаря кабіни літального апарата
Номер патенту: 82903
Опубліковано: 26.05.2008
Автори: Поздняков Анатолій Сергійович, П'ятецький Олександр Васильович, Овсянніков Юрій Олександрович, Ратнічіхін Сергій Степанович
МПК: B29C 51/00, B64C 1/14, C03B 23/00, C03B 17/00, C03B 9/00
Мітки: засклення, елементів, спосіб, кабіни, скла, апарата, органічного, формування, літального, ліхтаря, неорієнтованого
Формула / Реферат:
1. Спосіб формування з неорієнтованого органічного скла елементів засклення ліхтаря кабіни літального апарата, при якому одержують лист органічного скла марки СО-120, проводять технологічні операції по розмітці і розкрою заготівок, вирізають заготівку скла згідно з розміткою, обробляють торці заготівки, очищають поверхню заготівки від протекторного покриття, проводять зовнішній огляд заготівки на відсутність механічних ушкоджень і...
Спосіб і система для виявлення ушкодження ротора двигуна літального апарата і двигун літального апарата
Номер патенту: 82462
Опубліковано: 25.04.2008
Автори: Компера Патрік, Еван Філіпп
МПК: G01M 1/22, G01H 1/00, F01D 21/00
Мітки: двигуна, спосіб, система, ротора, виявлення, апарата, двигун, літального, ушкодження
Формула / Реферат:
1. Спосіб виявлення ушкодження ротора двигуна літального апарата, який включає вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, який відрізняється тим, щозчитують зібрані дані,на основі зібраних даних обчислюють середній вектор вібрації в вибраному інтервалі швидкостей обертання ротора, причому амплітуда...
Попередній патент: Спосіб дозування матеріалу шихти для доменної печі
Наступний патент: Запірно-пломбувальний пристрій
Випадковий патент: Бурове долото