Установка по моделюванню руху робочих органів ґрунтообробних машин
Номер патенту: 34499
Опубліковано: 11.08.2008
Автори: Прасолов Євген Якович, Лавренко Володимир Васильович, Ляшенко Сергій Васильович, Мироненко Ігор Валентинович, Лапенко Григорій Олександрович

Формула / Реферат
1. Установка по моделюванню руху робочих органів ґрунтообробних машин, яка містить зрізаний циліндр, який заповнений ґрунтом і обертається навколо вертикальної осі, яка відрізняється тим, що зрізаний циліндр (з колоподібною формою лотка) виконаний з внутрішнім діаметром 2,6 м, зовнішнім діаметром - 3,6 м та оптимальною висотою - 0,5 м (з регульованою висотою стінок).
2. Установка за п. 1, яка відрізняється тим, що в рух приводиться ґрунт, а моделі робочих органів та вимірювальна апаратура залишаються нерухомими, остання фіксує результати підвищеної точності та надійності.
3. Установка за пп. 1, 2, яка відрізняється тим, що на тримачі опорна рама тримає два та більше робочих органів.
4. Установка за пп. 1-3, яка відрізняється тим, що має опорну раму, робочі органи з боковим кріпленням стійок, а глибина занурення їх у ґрунт регулюється механізмом бокових стояків в діапазоні від 0 до 50 см.
5. Установка за пп. 1-4, яка відрізняється тим, що опорна рама в заданому положенні контролюється розміщеними на ній датчиками рівня, по центру - горизонтальним, а на боковихїї частинах - двома вертикальними.
6. Установка за пп. 1-5, яка відрізняється тим, що ущільнювальні котки використовуються: металеві - суцільні або наповнювальні, гумові - металеві або наповнювальні, а також їх поєднання, для покращення копіювання рельєфу поверхні ґрунту та його ущільнення.
7. Установка за пп. 1-6, яка відрізняється тим, що пружинами динамометричними регулюється сила тиску котків на ґрунт в діапазоні від 0 до 200 Н.
8. Установка за пп. 1-7, яка відрізняється тим, що механічний варіатор, в процесі роботи, плавно змінює швидкість обертання каналу в діапазоні від 0,01 до 333 м/хв.
9. Установка за пп. 1-8, яка відрізняється тим, що переміщення ґрунтових шарів на заданій глибині візуально здійснюється через стінку прозору та фіксується фото- і відеоапаратурою.
10. Установка за пп. 1-9, яка відрізняється тим, що досліджується абразивне зношування поверхонь ґрунтообробних робочих органів машин на всіх типах ґрунтів.
Текст
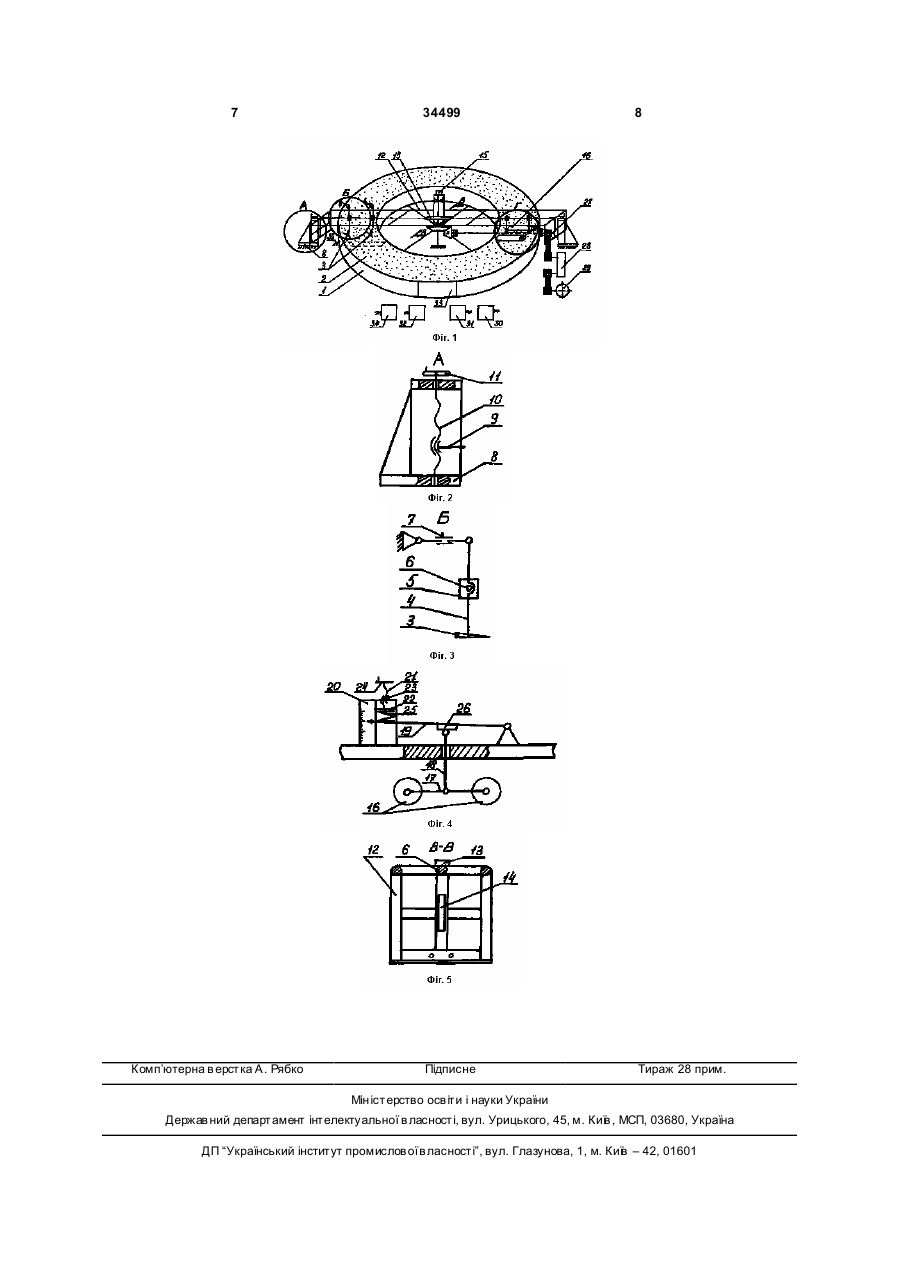
1. Установка по моделюванню руху робочих органів ґрунтообробних машин, яка містить зрізаний циліндр, який заповнений ґрунтом і обертається навколо вертикальної осі, яка відрізняється тим, що зрізаний циліндр (з колоподібною формою лотка) виконаний з внутрішнім діаметром 2,6м, зовнішнім діаметром - 3,6м та оптимальною висотою - 0,5м (з регульованою висотою стінок). 2. Установка за п. 1, яка відрізняється тим, що в рух приводиться ґрунт, а моделі робочих органів та вимірювальна апаратура залишаються нерухомими, остання фіксує результати підвищеної точності та надійності. 3. Установка за пп.1, 2, яка відрізняється тим, що на тримачі опорна рама тримає два та більше робочих органів. 4. Установка за пп.1-3, яка відрізняється тим, що має опорну раму, робочі органи з боковим кріпленням стійок, а глибина занурення їх у ґрунт ре U 2 34499 1 3 34499 досліджувати за переміщенням ґрунтових шарів на заданій глибині та фіксувати результати на комп'ютер, фото- і відеоапаратуру. Близьким аналогом є: установка навколо осі, якої обертається лоток циліндричної форми, заповнений ґрунтом, який дає можливість проводити досліди на моделях активних робочих органів. [Бабицкий Л.Ф., Кусенко Ю.Ю.. Лабораторная установка «Моделирование процесса движения рабочего органа в почве». Машины и способы механизации сельскохозяйственного производства. Технические науки. Выпуск №84. Симферополь 2005. - 258с.]. Недоліками є: неможливість змінювати швидкість обертання лотка під час проведення досліджень; енергоємна форма лотка; неможливість регулювати силу тиску ущільнення ґрунту котками; неможливість досліджувати під час роботи взаємодію двох і більше робочих органів одночасно; відсутність датчиків, що контролюють параметри процесів досліджень; неможливість досліджувати за переміщенням Ґрунтових шарів на заданій глибині та фіксувати результати на комп'ютер, фото- і відеоапаратуру. Метою є: забезпечення руху ґр унту відносно нерухомого робочого органу;проводити дослідження необмежені по часу; зменшення енерговитрати та тр удоємності підготовчих операцій при проведенні дослідження; підвищення надійності та точності результатів; досліджування за переміщенням Ґрунтових шарів на заданій глибині а також фіксування результатів на комп'ютер, фото - і відеоапаратуру; змінювання швидкості обертання лотка під час проведення дослідження; регулювання сили тиску ущільнення ґрунту котками; змінення форми та розмірів лотка. Поставлена мета, вирішується створенням установки по моделюванню руху робочих органів Ґрунтообробних машин, яка має вигляд: зрізаний циліндр, внутрішній діаметр - 2,6м, зовнішній діаметр - 3,6м, з оптимальною висотою - 0,5м, (з регульованою висотою стінок), який заповнений фунтом та обертається навколо вертикальної осі в рух приводиться ґрунт, а моделі робочих органів та вимірювальна апаратура, залишаються нерухомими, остання фіксує результати підвищеної точності та надійності. Модель робочого органу закріплюється нерухомо до стійки, яка регулює глибину занурення робочого органу. Стійка за допомогою каретки переміщується в радіальному напрямку по тримачу, на якому опорна рама, тримає два та більше робочих органів. Установка має опорну раму, робочі органи з боковим кріпленням стійок, а глибина занурення робочих органів у ґрунт, регулюється механізмом бокових стояків в діапазоні від 0 до 50см. Датчик зусилля, кільцевого типу, фіксує величину сили, що діє на робочий орган з боку ґрунту. Глибина занурення моделі робочого органу регулюється механізмами лівого та правого бокових стояків. По напрямних стояка переміщується рухома гайка, гвинт рухається рукояткою, переміщення від рухомої гайки передається опорній рамі, опорна рама в заданому положенні контролюється розміщеними на ній датчиками рівня: по центру - горизонтальним, а на 4 бокових її частинах - двома вертикальними. Датчик швидкості, фіксує швидкість обертання каналу. Ущільнювальні котки використовуються (металеві - суцільні або наповнювальні; гумові - суцільні або наповню вальні, а також їх поєднання), для покращення копіювання рельєфу ґр унту та його ущільнення. Котки встановлені на рамці візка, яка шарнірно прикріплена до стійки. На стійку тисне важіль, сила тиску фіксується на шкалі. Гвинт з упорною шайбою, переміщується по гайці корпуса, обертаючи рукоятку. Упорна шайба стискає динамометричну пружину, внаслідок чого передається зусилля на важіль. Пружинами динамометричними регулюється сила тиску котків на ґрунт в діапазоні від 0 до 200Н. Датчиком фіксується зусилля процесу ущільнення ґрунту. Канал отримує обертовий рух від ведучого валу, якому, механічний варіатор передає обертовий рух від мотор - редуктора. Механічний варіатор, в процесі роботи, плавно змінює швидкість обертання каналу в діапазоні від 0,01 до 333м/хв.. Показники датчика швидкості обертання каналу, датчика зусилля, відображаються на тензовимірювальній апаратурі відповідно ТА-5 і ТА-8. Зображення процесу переміщення ґрунтови х шарів, яке зафіксоване, передається на монітор М-1. Переміщення ґрунтових шарів на заданій глибині, візуально, здійснюється через стінку прозору, та фіксується фото - і відеоапаратурою. Результати датчика швидкості обертання каналу передаються на монітор М-2. Об'ємні сили у ґр унті моделюються електромагнітом. Установка використовується для дослідження абразивного зношування поверхонь ґрунтообробних робочих органів машин на всіх типах ґр унтів. Корисна модель, що заявляється пояснюється кресленням. На Фіг.1 установка по моделюванню руху робочих органів ґрунтообробних машин; на Фіг.2 кінематична схема бокового стояка, вид збоку; на Фіг.3 кінематична схема кріплення моделі робочого органу, вид збоку; на Фіг.4 кінематична схема механізму ущільнювального, вид збоку; на Фіг. 5 переріз рами опорної. Установка по моделюванню руху робочих органі ґрунтообробних машин, складається з: каналу 1, зрізаний циліндр, внутрішній діаметр - 2,6м, зовнішній діаметр - 3,6м, з оптимальною висотою 0,5м, (з регульованою висотою стінок), який заповнений ґрунтом 2 та обертається навколо вертикальної осі в рух приводиться ґрунт, а моделі робочих органів та вимірювальна апаратура, залишаються нерухомими, остання фіксує результати підвищеної точності та надійності; модель 3 робочого органу закріплюється нерухомо до стійки 4, яка регулює глибину занурення робочого органу; стійка за допомогою каретки 5 переміщується в радіальному напрямку по тримачу 6, на якому опорна рама тримає два та більше робочих органів. Установка має опорну раму, робочі органи з боковим кріпленням стійок, а глибина занурення робочих органів у ґр унт, регулюється механізмом бокових стояків в діапазоні від 0 до 50см; датчика 7 зусилля, кільцевого типу, який фіксує величину сили, що діє на робочий орган з боку ґрунту, глибина занурення моделі робочого органу регулю 5 34499 ється механізмами лівого, правого бокових стояків 8, які в свою чергу складаються: по напрямних стояка переміщується рухома гайка 9, гвинта 10 рухається рукояткою 11, переміщення від рухомої гайки передається опорній рамі 12, опорна рама в заданому положенні контролюється розміщеними на ній датчиками рівня: по центру - горизонтальним 13, а на бокових її частинах - двома вертикальними 14; датчика 15, який фіксує швидкість обертання каналу; ущільнювальних котків 16 використовуються (металеві - суцільні або наповнювальні; гумові - суцільні або наповнювальні, а також їх поєднання), для покращення копіювання рельєфу поверхні ґрунту та його ущільнення. Котки встановлені на рамці 17 візка, яка шарнірне прикріплена до стійки 18. На стійку тисне важіль 19, сила тиску фіксується на шкалі 20. Гвинт 21 з упорною шайбою 22, переміщується по гайці 23 корпуса, обертаючи рукоятку 24. Упорна шайба стискає динамометричну пружину 25, внаслідок чого передається зусилля на важіль. Пружинами динамометричними регулюється сила тиску котків на ґрунт в діапазоні від 0 до 200Н. Датчиком 26, фіксується зусилля процесу ущільнення ґрунту. Канал отримує обертовий рух від ведучого валу 27, якому, механічний варіатор 28 передає обертовий рух від мотор - редуктора 29. Механічний варіатор, в процесі роботи, плавно змінює швидкість обертання каналу в діапазоні від 0,01 до 333м/хв. Показники датчика швидкості обертання каналу, датчика зусилля, відображаються на тензовимірювальній апаратурі 30 і 31 відповідно ТА-5 і ТА-8. Зображення процесу переміщення ґрунтових шарів, яке зафіксоване, передається на монітор 32, М-1. Переміщення ґрунтових шарів на заданій глибині, візуально, здійснюється через стінку прозору 33, та фіксується фото- і відеоапаратурою. Результати датчика швидкості обертання каналу передаються на монітор 34, М-2. Об'ємні сили у ґрунті моделюються електромагнітом 35. Установка використовується для дослідження абразивного зношування поверхонь ґрунтообробних робочих органів машин на всіх типах ґрунтів. Установка по моделюванню руху робочих органі ґрунтообробних машин, працює наступним чином. Канал, зрізаний циліндр, внутрішній діаметр - 2,6м, зовнішній діаметр - 3,6м, з оптимальною висотою - 0,5м, (з регульованою висотою стінок), який заповнений ґрунтом, обертається навколо вертикальної осі в рух приводиться ґрунт, а моделі робочих органів та вимірювальна апаратура, залишаються нерухомими, остання фіксує результати підвищеної точності та надійності. Модель робочого органу закріплюється нерухомо до стійки, яка регулює глибину занурення робочого органу. Стійка за допомогою каретки, переміщується в радіальному напрямку по тримачу, на якому опорна рама тримає два та більше робочих 6 органів. Установка має опорну раму, робочі органи з боковим кріпленням стійок, а глибина занурення робочих органів у ґр унт, регулюється механізмом бокових стояків в діапазоні від 0 до 50см. Датчик зусилля, кільцевого типу, фіксує величину сили, що діє на робочий орган з боку ґрунту. Глибина занурення моделі робочого органу регулюється механізмами лівого та правого бокових стояків. По напрямних стояка переміщується рухома гайка, гвинт р ухається рукояткою, переміщення від рухомої гайки передається опорній рамі, опорна рама в заданому положенні контролюється розміщеними на ній датчиками рівня: по центру - горизонтальним, а на бокових її частинах - двома вертикальними. Датчик швидкості, фіксує швидкість обертання каналу. У щільнювальні котки використовуються (металеві - суцільні або наповнювальні; гумові - суцільні або наповнювальні, а також їх поєднання) для покращення копіювання рельєфу поверхні ґрунту та його ущільнення. Котки встановлені на рамці візка, яка шарнірно прикріплена до стійки. На стійку тисне важіль, сила тиску фіксується на шкалі. Гвинт з упорною шайбою, переміщується по гайці корпуса, обертаючи рукоятку. Упорна шайба стискає динамометричну пружину, внаслідок чого передається зусилля на важіль. Пружинами динамометричними регулюється сила тиску котків на ґрунт в діапазоні від 0 до 200Н. Датчиком фіксується зусилля процесу ущільнення ґрунту. Канал отримує обертовий рух від ведучого валу, якому, механічний варіатор передає обертовий рух від мотор - редуктора. Механічний варіатор, в процесі роботи, плавно змінює швидкість обертання каналу в діапазоні від 0,01 до 333м/хв. Показники датчика швидкості обертання каналу, датчика зусилля, відображаються на тензовимірювальній апаратурі відповідно ТА-5 і ТА-8. Зображення процесу переміщення ґрунтових шарів, яке зафіксоване, передається на монітор М-1. Переміщення ґрунтових шарів на заданій глибині, візуально, здійснюється через стінку прозору, та фіксується фото- і відеоапаратурою. Результати датчика швидкості обертання каналу передаються на монітор М-2. Об'ємні сили у ґр унті моделюються електромагнітом. Установка використовується для дослідження абразивного зношування поверхонь ґрунтообробних робочих органів машин на всіх типах ґр унтів. Заявлене технічне рішення відноситься до сільськогосподарського машинобудування, а саме до уста ткування по обробці ґрунту і може бути використане для досліджень та моделювань руху робочих органів ґрунтообробних машин. Установка пройшла лабораторні та напіввиробничі випробування і готова до більш широкого використання. Таким чином корисна модель відповідає критерію «Промислова придатність» і в цілому може бути захищена патентом. 7 Комп’ютерна в ерстка А. Рябко 34499 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnit for simulating movement of working elements of soil-cultivating machines
Автори англійськоюLiashenko Serhii Vasyliovych, Lapenko Hryhorii Oleksandrovych, Prasolov Yevhenii Yakovych, Lavrenko Volodymyr Vasyliovych, Myronenko Ihor Valentynovych
Назва патенту російськоюУстановка по моделированию движения рабочих органов почвообрабатывающих машин
Автори російськоюЛяшенко Сергей Васильевич, Лапенко Григорий Александрович, Прасолов Евгений Яковлевич, Лавренко Владимир Васильевич, Мироненко Игорь Валентинович
МПК / Мітки
МПК: A01B 39/00
Мітки: моделюванню, установка, робочих, машин, ґрунтообробних, руху, органів
Код посилання
<a href="https://ua.patents.su/4-34499-ustanovka-po-modelyuvannyu-rukhu-robochikh-organiv-runtoobrobnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Установка по моделюванню руху робочих органів ґрунтообробних машин</a>
Спосіб зміцнення робочих органів сільськогосподарських машин
Номер патенту: 50620
Опубліковано: 15.10.2002
Автори: Аулін Віктор Васильович, Черновол Михайло Іванович, Надворний Борис Євдокимович, Кропівний Володимир Миколайович, Кулєшков Юрій Володимирович, Саінсус Олександр Дмитрович
МПК: B22F 7/02
Мітки: органів, сільськогосподарських, зміцнення, спосіб, робочих, машин
Формула / Реферат:
1. Спосіб зміцнення робочих органів сільськогосподарських машин попереднім нанесенням порошкового матеріалу на поверхню, що наплавляється, при підборі порошків з різними властивостями зносостійкості відповідно до кривої зносу робочих поверхонь з наступним його розплавлюванням, витримкою й охолодженням, який відрізняється тим, що підбір порошків з різними властивостями зносостійкості здійснюють зміною концентрації зміцнюючої зносостійкої...
Спосіб випробування робочих органів грунтообробних машин на абразивне зношування
Номер патенту: 26308
Опубліковано: 10.09.2007
Автори: Войтюк Валерій Дмитрович, КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ
МПК: G01N 3/56
Мітки: машин, грунтообробних, абразивне, робочих, спосіб, зношування, органів, випробування
Текст:
Механізм навіски робочих органів посівних машин
Номер патенту: 38884
Опубліковано: 15.05.2001
Автори: Фесенко Григорій Васильович, Пастухов Валерій Іванович
МПК: A01C 7/20
Мітки: машин, органів, посівних, механізм, робочих, навіски
Формула / Реферат:
(21) 2000116396 Дата прийняття(54) (57) рішення 23 квітня 2001 р.1. Механізм навіски робочих органів посівних машин, який включає радіальний поводок, шарнірно з'єднаний з рамою машини та переднім робочим органом,...
Механізм приводу робочих органів сільськогосподарських машин
Номер патенту: 77806
Опубліковано: 15.01.2007
Автори: Пейчев Савва Васильович, Яблуновський Василь Сергійович, Кумпан Віктор Карпович, Павлик Володимир Іванович
МПК: A01D 34/00, A01B 71/00
Мітки: приводу, механізм, сільськогосподарських, органів, машин, робочих
Формула / Реферат:
Механізм приводу робочих органів сільськогосподарських машин, який містить ексцентрик та вал, з’єднані між собою хомутом, які мають в місцях з’єднання лиски, хомут стягує вал і ексцентрик, а внутрішня поверхня хомута у поперечному перерізі виконана у вигляді паза, який відрізняється тим, що радіуси вала, ексцентрика та поверхонь, якими закінчується паз, рівні між собою та є рівними по значенню половині розміру ширини паза, а розміри
Спосіб виготовлення лезових робочих органів сільськогосподарських машин
Номер патенту: 70233
Опубліковано: 15.09.2004
Автори: Чайка Віталій Васильович, Лукашов Олександр Олексійович
МПК: B21H 7/00
Мітки: органів, робочих, спосіб, лезових, виготовлення, сільськогосподарських, машин
Формула / Реферат:
1. Спосіб виготовлення лезових робочих органів сільськогосподарських машин, що включає відрізання заготовок лезового робочого органу, вирізку контуру різальної крайки з одночасним її заточенням методом плазмового різання, гартування, а також формування посадкових отворів, який відрізняється тим, що посадкові отвори формують перед гартуванням, гартування здійснюють всього робочого органу після плазмового різання і формування посадкових отворів...
Попередній патент: Спосіб ранньої клітинної діагностики мієлодиспластичного синдрому у людини
Наступний патент: Спосіб одержання водного вітамінного продукту “софора”
Випадковий патент: Горілка "буковинська"