Багатоцільовий верстат
Формула / Реферат
1. Багатоцільовий верстат, що містить основну стійку, шпиндельну бабку з вертикально рухомим горизонтальним шпинделем, горизонтальний поворотний стіл, систему автоматичної зміни інструменту та інструментальний магазин, який відрізняється тим, що верстат має додатковий багатокоординатний технологічний робот - "робот-слюсар" на стійці, яка змонтована на горизонтальній підставці і оснащена інструментотримачем, додатковим магазином інструментів з пристроєм для їх автоматичної зміни, а основна стійка встановлена на поперечних до осі шпинделя напрямних і має поперечну подачу.
2. Багатоцільовий верстат за п. 1, який відрізняється тим, що багатокоординатний "робот-слюсар" з інструментотримачем виконаний у вигляді "мотор-патрона", розташованого на поворотному пристрої і оснащеного приводом повздовжнього переміщення, встановленого на стійці, а додатковий магазин інструментів виконаний у вигляді прямокутної касети з можливістю автоматичної зміни як інструментальних блоків, так і окремих інструментів.
3. Багатоцільовий верстат за п. 1, який відрізняється тим, що багатокоординатний "робот-слюсар" з інструментотримачем виконаний у вигляді "мотор-патрона", встановленого на двох важелях з поворотними пристроями у вузлах важелів, за допомогою яких інструментотримач зв'язаний із стійкою, на якій розташований циліндричний магазин інструментів.
4. Багатоцільовий верстат за п. 1, який відрізняється тим, що багатокоординатний "робот-слюсар"з інструментотримачем виконаний у вигляді висувного "мотор-шпинделя" з можливістю переміщення по напрямних на поворотній платформі, установленого на стійці разом з поворотною платформою, причому стійка має привід вертикальних переміщень, а система зміни інструмента - двопозиційний автооператор, виконаний рухомим у вертикальному напрямку, і магазин інструментів, встановлений в крайньому положенні стійки на горизонтальній підставці.
Текст
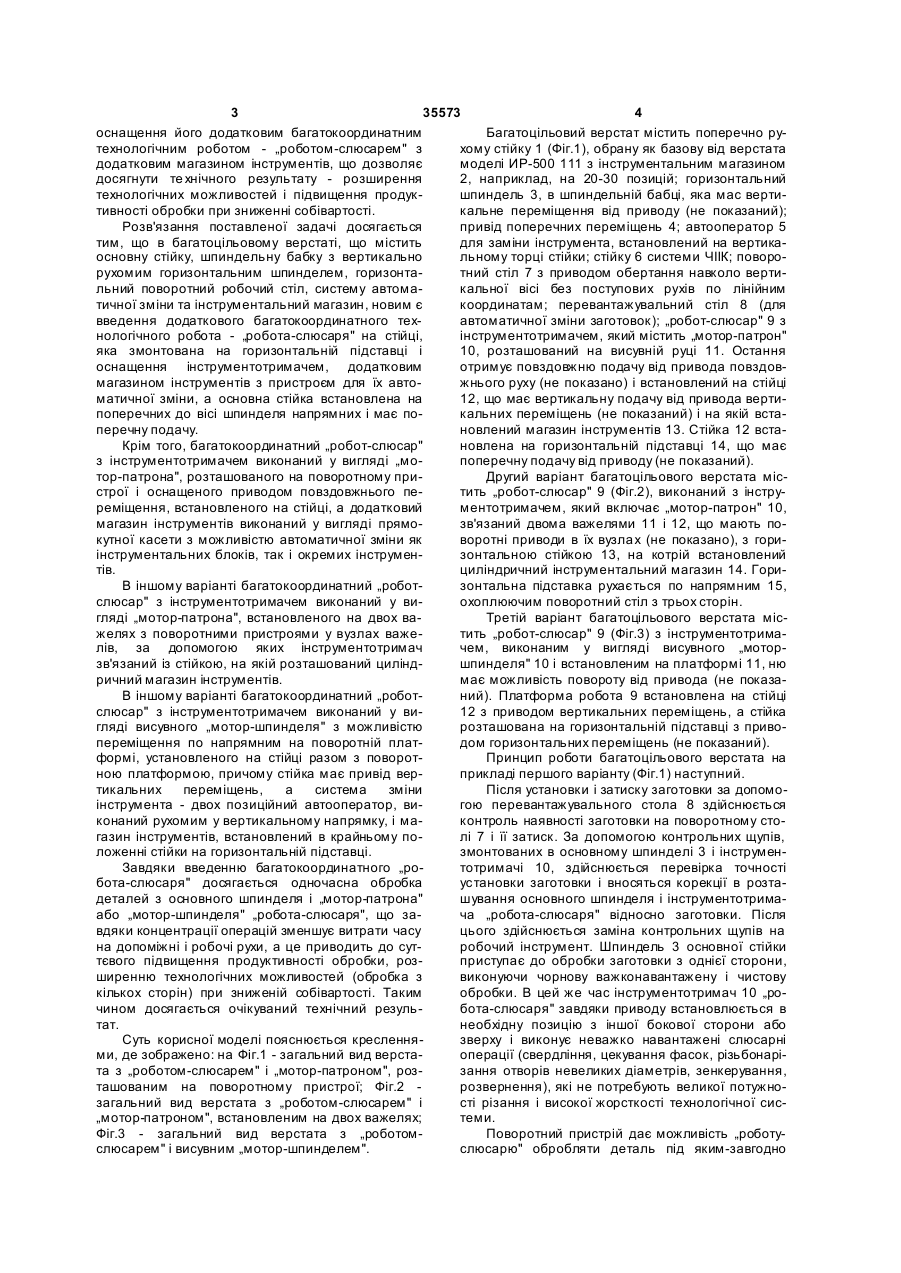
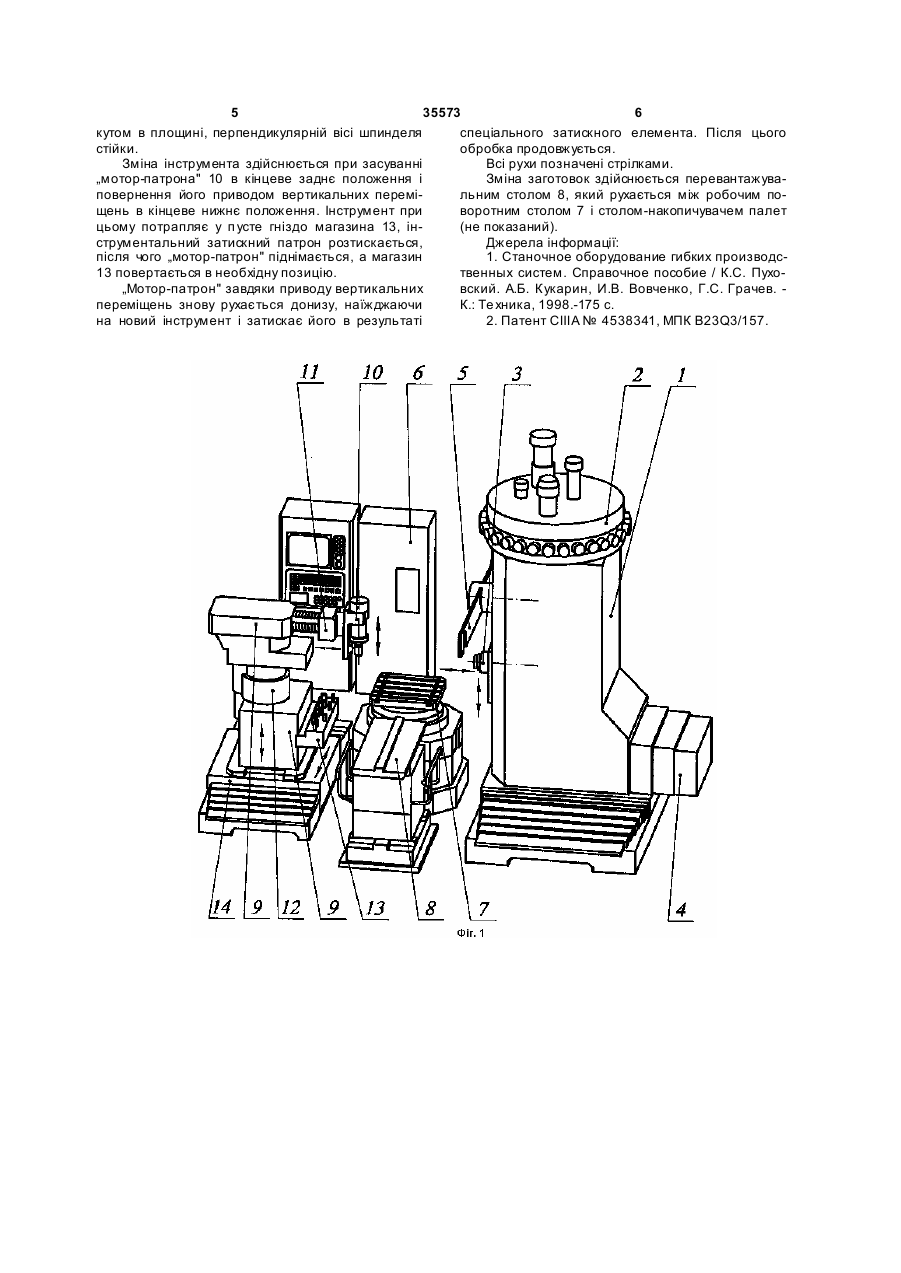
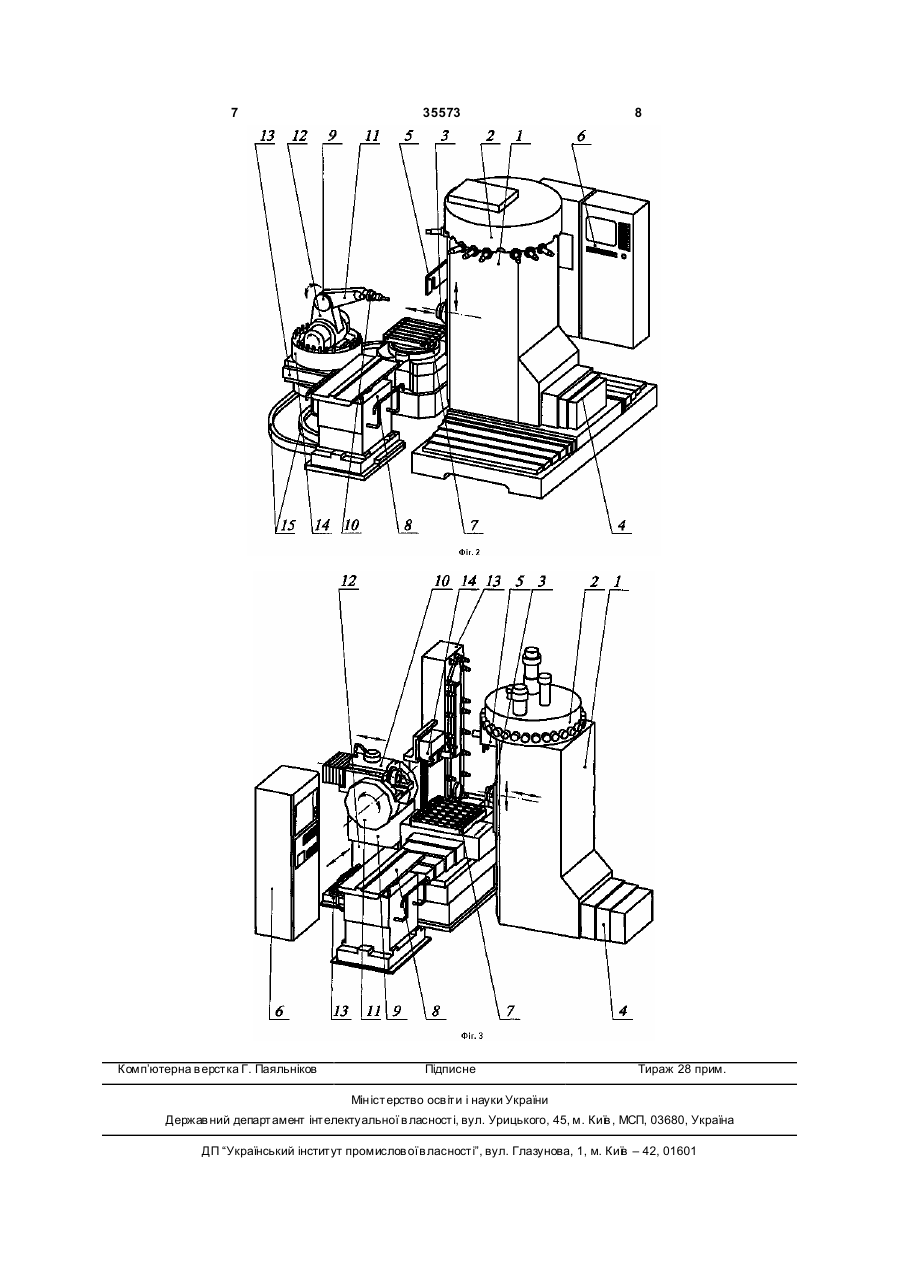
1. Багатоцільовий верстат, що містить основну стійку, шпиндельну бабку з вертикально рухомим горизонтальним шпинделем, горизонтальний поворотний стіл, систему автоматичної зміни інструменту та інстр ументальний магазин, який відрізняється тим, що верстат має додатковий багатокоординатний технологічний робот - "роботслюсар" на стійці, яка змонтована на горизонтальній підставці і оснащена інструментотримачем, додатковим магазином інструментів з пристроєм для їх автоматичної зміни, а основна стійка встановлена на поперечних до осі шпинделя напрямних і має поперечну подачу. 2. Багатоцільовий верстат за п. 1, який відрізняється тим, що багатокоординатний "роботслюсар" з інструментотримачем виконаний у вигляді "мотор-патрона", розташованого на поворотному пристрої і оснащеного приводом повздовж U 2 (19) 1 3 35573 4 оснащення його додатковим багатокоординатним Багатоцільовий верстат містить поперечно рутехнологічним роботом - „роботом-слюсарем" з хому стійку 1 (Фіг.1), обрану як базову від верстата додатковим магазином інструментів, що дозволяє моделі ИР-500 111 з інструментальним магазином досягнути те хнічного результату - розширення 2, наприклад, на 20-30 позицій; горизонтальний технологічних можливостей і підвищення продукшпиндель 3, в шпиндельній бабці, яка мас вертитивності обробки при зниженні собівартості. кальне переміщення від приводу (не показаний); Розв'язання поставленої задачі досягається привід поперечних переміщень 4; автооператор 5 тим, що в багатоцільовому верстаті, що містить для заміни інструмента, встановлений на вертикаосновну стійку, шпиндельну бабку з вертикально льному торці стійки; стійку 6 системи ЧІІК; поворорухомим горизонтальним шпинделем, горизонтатний стіл 7 з приводом обертання навколо вертильний поворотний робочий стіл, систему автомакальної вісі без поступових рухів по лінійним тичної зміни та інструментальний магазин, новим є координатам; перевантажувальний стіл 8 (для введення додаткового багатокоординатного техавтоматичної зміни заготовок); „робот-слюсар" 9 з нологічного робота - „робота-слюсаря" на стійці, інструментотримачем, який містить „мотор-патрон" яка змонтована на горизонтальній підставці і 10, розташований на висувній руці 11. Остання оснащення інструментотримачем, додатковим отримує повздовжню подачу від привода повздовмагазином інструментів з пристроєм для їх автожнього руху (не показано) і встановлений на стійці матичної зміни, а основна стійка встановлена на 12, що має вертикальну подачу від привода вертипоперечних до вісі шпинделя напрямних і має покальних переміщень (не показаний) і на якій встаперечну подачу. новлений магазин інструментів 13. Стійка 12 встаКрім того, багатокоординатний „робот-слюсар" новлена на горизонтальній підставці 14, що має з інструментотримачем виконаний у вигляді „мопоперечну подачу від приводу (не показаний). тор-патрона", розташованого на поворотному приДругий варіант багатоцільового верстата місстрої і оснащеного приводом повздовжнього петить „робот-слюсар" 9 (Фіг.2), виконаний з інструреміщення, встановленого на стійці, а додатковий ментотримачем, який включає „мотор-патрон" 10, магазин інструментів виконаний у вигляді прямозв'язаний двома важелями 11 і 12, що мають покутної касети з можливістю автоматичної зміни як воротні приводи в їх вузлах (не показано), з гориінструментальних блоків, так і окремих інструмензонтальною стійкою 13, на котрій встановлений тів. циліндричний інструментальний магазин 14. ГориВ іншому варіанті багатокоординатний „роботзонтальна підставка рухається по напрямним 15, слюсар" з інструментотримачем виконаний у виохоплюючим поворотний стіл з трьох сторін. гляді „мотор-патрона", встановленого на двох ваТретій варіант багатоцільового верстата місжелях з поворотними пристроями у вузлах важетить „робот-слюсар" 9 (Фіг.3) з інструментотрималів, за допомогою яких інструментотримач чем, виконаним у вигляді висувного „моторзв'язаний із стійкою, на якій розташований циліндшпинделя" 10 і встановленим на платформі 11, ню ричний магазин інструментів. має можливість повороту від привода (не показаВ іншому варіанті багатокоординатний „роботний). Платформа робота 9 встановлена на стійці слюсар" з інструментотримачем виконаний у ви12 з приводом вертикальних переміщень, а стійка гляді висувного „мотор-шпинделя" з можливістю розташована на горизонтальній підставці з привопереміщення по напрямним на поворотній платдом горизонтальних переміщень (не показаний). формі, установленого на стійці разом з поворотПринцип роботи багатоцільового верстата на ною платформою, причому стійка має привід верприкладі першого варіанту (Фіг.1) наступний. тикальних переміщень, а система зміни Після установки і затиску заготовки за допомоінструмента - двох позиційний автооператор, вигою перевантажувального стола 8 здійснюється конаний рухомим у вертикальному напрямку, і маконтроль наявності заготовки на поворотному стогазин інструментів, встановлений в крайньому полі 7 і її затиск. За допомогою контрольних щупів, ложенні стійки на горизонтальній підставці. змонтованих в основному шпинделі 3 і інструменЗавдяки введенню багатокоординатного „рототримачі 10, здійснюється перевірка точності бота-слюсаря" досягається одночасна обробка установки заготовки і вносяться корекції в розтадеталей з основного шпинделя і „мотор-патрона" шування основного шпинделя і інструментотримаабо „мотор-шпинделя" „робота-слюсаря", що зача „робота-слюсаря" відносно заготовки. Після вдяки концентрації операцій зменшує витрати часу цього здійснюється заміна контрольних щупів на на допоміжні і робочі рухи, а це приводить до сутробочий інструмент. Шпиндель 3 основної стійки тєвого підвищення продуктивності обробки, розприступає до обробки заготовки з однієї сторони, ширенню технологічних можливостей (обробка з виконуючи чорнову важконавантажену і чистову кількох сторін) при зниженій собівартості. Таким обробки. В цей же час інструментотримач 10 „рочином досягається очікуваний технічний резульбота-слюсаря" завдяки приводу встановлюється в тат. необхідну позицію з іншої бокової сторони або Суть корисної моделі пояснюється кресленнязверху і виконує неважко навантажені слюсарні ми, де зображено: на Фіг.1 - загальний вид верстаоперації (свердління, цекування фасок, різьбонаріта з „роботом-слюсарем" і „мотор-патроном", роззання отворів невеликих діаметрів, зенкерування, ташованим на поворотному пристрої; Фіг.2 розвернення), які не потребують великої потужнозагальний вид верстата з „роботом-слюсарем" і сті різання і високої жорсткості технологічної сис„мотор-патроном", встановленим на двох важелях; теми. Фіг.3 - загальний вид верстата з „роботомПоворотний пристрій дає можливість „роботуслюсарем" і висувним „мотор-шпинделем". слюсарю" обробляти деталь під яким-завгодно 5 35573 6 кутом в площині, перпендикулярній вісі шпинделя спеціального затискного елемента. Після цього стійки. обробка продовжується. Зміна інструмента здійснюється при засуванні Всі рухи позначені стрілками. „мотор-патрона" 10 в кінцеве заднє положення і Зміна заготовок здійснюється перевантажуваповернення його приводом вертикальних перемільним столом 8, який рухається між робочим пощень в кінцеве нижнє положення. Інструмент при воротним столом 7 і столом-накопичувачем палет цьому потрапляє у п усте гніздо магазина 13, ін(не показаний). струментальний затискний патрон розтискається, Джерела інформації: після чого „мотор-патрон" піднімається, а магазин 1. Станочное оборудование гибких производс13 повертається в необхідну позицію. твенных систем. Справочное пособие / К.С. Пухо„Мотор-патрон" завдяки приводу вертикальних вский. А.Б. Кукарин, И.В. Вовченко, Г.С. Грачев. переміщень знову рухається донизу, наїжджаючи К.: Те хника, 1998.-175 с. на новий інструмент і затискає його в результаті 2. Патент СІІІА № 4538341, МПК B23Q3/157. 7 Комп’ютерна в ерстка Г. Паяльніков 35573 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultipurpose machine
Автори англійськоюKuznietsov Yurii Mykolaiovych
Назва патенту російськоюМногоцелевой станок
Автори російськоюКузнецов Юрий Николаевич
МПК / Мітки
МПК: B23Q 3/157
Мітки: багатоцільовий, верстат
Код посилання
<a href="https://ua.patents.su/4-35573-bagatocilovijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатоцільовий верстат</a>
Токарний багатоцільовий верстат
Номер патенту: 31226
Опубліковано: 25.03.2008
Автори: Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
МПК: B23B 5/00
Мітки: верстат, токарний, багатоцільовий
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, передню і задню бабки та револьверну головку, розташовану на супорті, який встановлений на штангах постійної довжини, нижні кінці яких зв'язані з механізмами поздовжньої подачі, розташованими паралельно осі шпиндельних вузлів, який відрізняється тим, що з протилежного боку супорта розміщена додаткова револьверна головка, співвісна першій револьверній головці, а задня бабка...
Токарний багатоцільовий верстат
Номер патенту: 27808
Опубліковано: 12.11.2007
Автори: Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
Мітки: багатоцільовий, токарний, верстат
Формула / Реферат:
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини з можливістю переміщення по напрямних, який відрізняється тим, що корпус рухомої частини встановлений на штангах постійної довжини, верхні кінці яких шарнірно зв'язані з ним, а кожний нижній кінець шарнірно зв'язаний з кроковим двигуном через...
Токарний багатоцільовий верстат
Номер патенту: 31223
Опубліковано: 25.03.2008
Автори: Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
МПК: B23B 5/00
Мітки: токарний, багатоцільовий, верстат
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, співвісні передню і задню бабки, кожна з яких оснащена шпиндельним вузлом із затискним патроном, та револьверну головку, розташовану на супорті, який встановлений на штангах постійної довжини, нижні кінці яких зв’язані з механізмами поздовжньої подачі, розташованими паралельно осі шпиндельних вузлів, який відрізняється тим, що верстат додатково оснащений другим дзеркально...
Токарний багатоцільовий верстат
Номер патенту: 30376
Опубліковано: 25.02.2008
Автори: Самойленко Олексій Васильович, Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович
Мітки: токарний, багатоцільовий, верстат
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, нерухому передню та рухому задню співвісні шпиндельні бабки, кожна з яких оснащена шпиндельним вузлом із затискним патроном, та револьверну головку, розташовану на супорті з можливістю переміщення вздовж напрямних, який відрізняється тим, що супорт виконаний у вигляді поворотної платформи з вертикальною віссю повороту, основа якої встановлена на штангах постійної довжини, нижні...
Верстат для розрізки заготовок магнітів
Номер патенту: 28349
Опубліковано: 10.12.2007
Автори: Бровченко Анатолій Михайлович, Лавріненко Валерій Іванович, Малишев Віктор Михайлович, Смоквина Володимир Віталійович
МПК: B23D 69/00
Мітки: магнітів, розрізки, заготовок, верстат
Формула / Реферат:
Верстат для розрізки заготовок магнітів, що має магазин із заготовками, механізм завантаження, вузол подачі мастильно-охолоджуючої рідини, який відрізняється тим, що верстат устатковано високоточним шпинделем з блоком спеціальних інструментів на гальванічній зв'язці та додатково барабанами з механізмом захоплення і закріплення заготовок.
Попередній патент: Склад для нанесення захисного покриття на металеву поверхню
Наступний патент: Сегнетоелектричний енергонезалежний запам`ятовуючий пристрій
Випадковий патент: Спосіб одержання штучних алмазів з вуглецевої суміші