Токарний багатоцільовий верстат
Номер патенту: 27808
Опубліковано: 12.11.2007
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович
Формула / Реферат
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини з можливістю переміщення по напрямних, який відрізняється тим, що корпус рухомої частини встановлений на штангах постійної довжини, верхні кінці яких шарнірно зв'язані з ним, а кожний нижній кінець шарнірно зв'язаний з кроковим двигуном через механізм поздовжньої подачі, розташований паралельно осі шпиндельного вузла.
2. Токарний багатоцільовий верстат за п. 1, який відрізняється тим, що механізми поздовжньої подачі виконані у вигляді кульково-гвинтових передач, осі яких співвісні між собою попарно.
3. Токарний багатоцільовий верстат за п. 1, який відрізняється тим, що механізми поздовжньої подачі виконані у вигляді гідро(пневмо)циліндрів, штоки яких нерухомі, а рухомі циліндри шарнірно зв'язані з нижніми кінцями штанг.
4. Токарний багатоцільовий верстат за п. 1, який відрізняється тим, що осі механізмів поздовжньої подачі, що розташовані по один бік корпуса рухомої частини, паралельні між собою і оснащені додатковою опорою кочення по напрямних станинах.
Текст
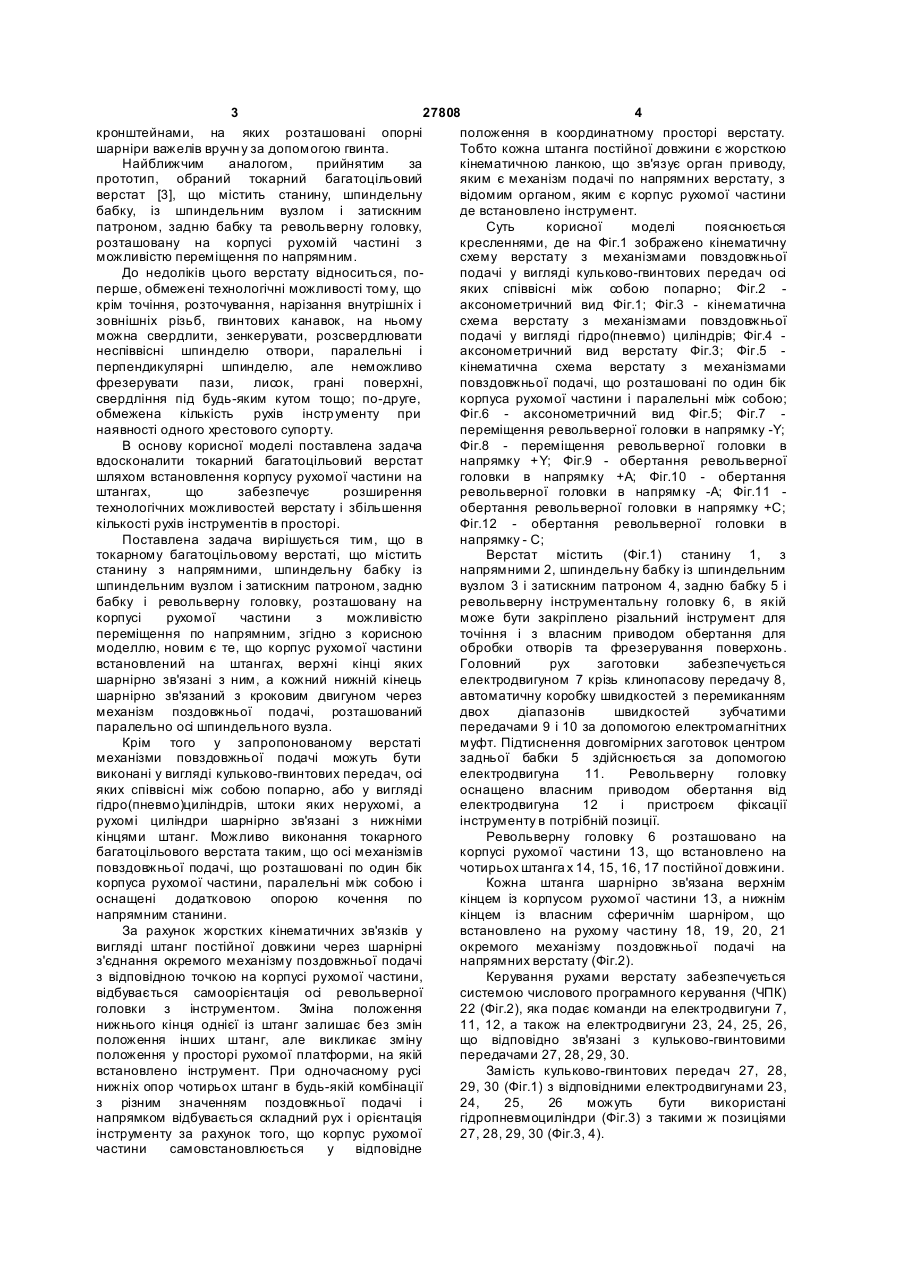
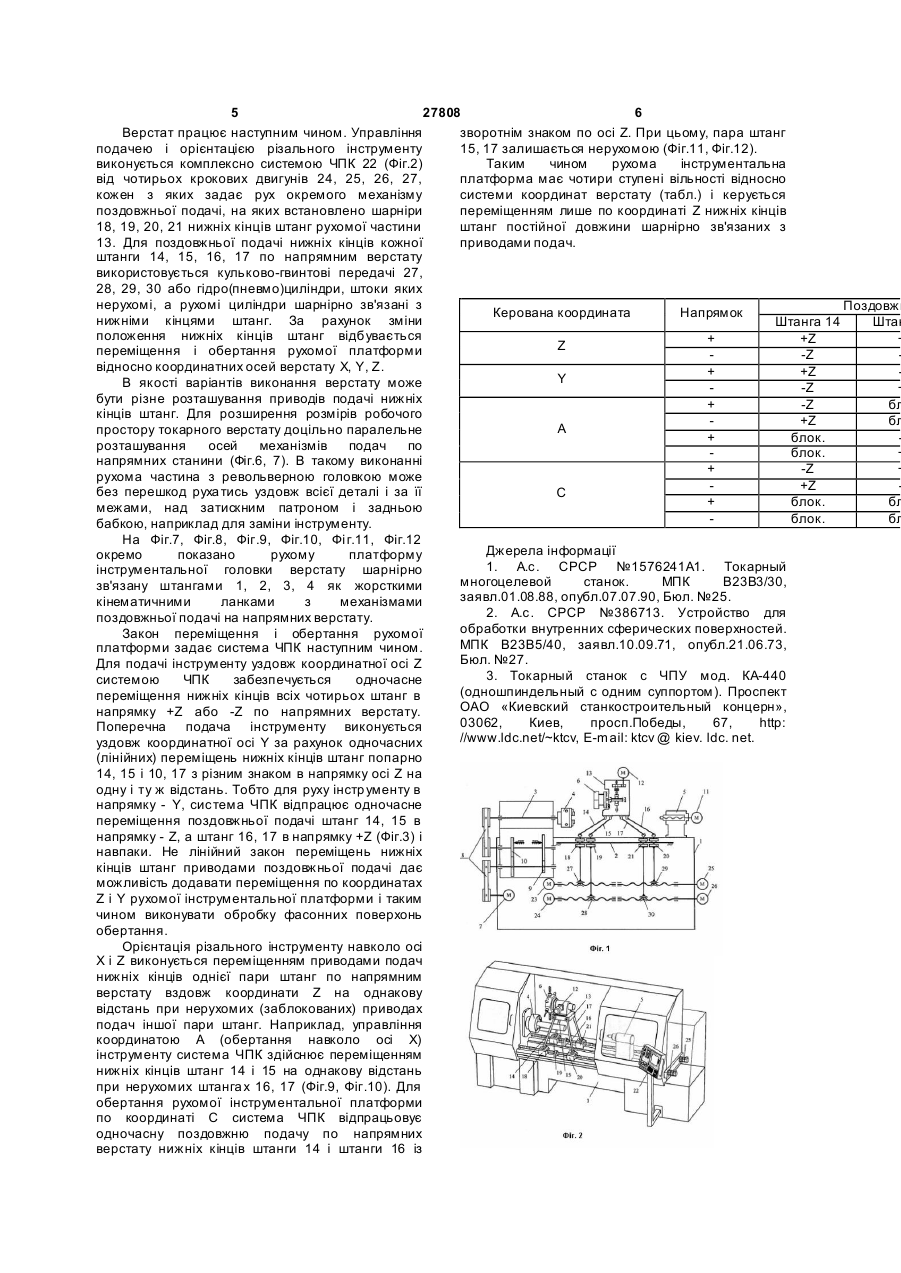
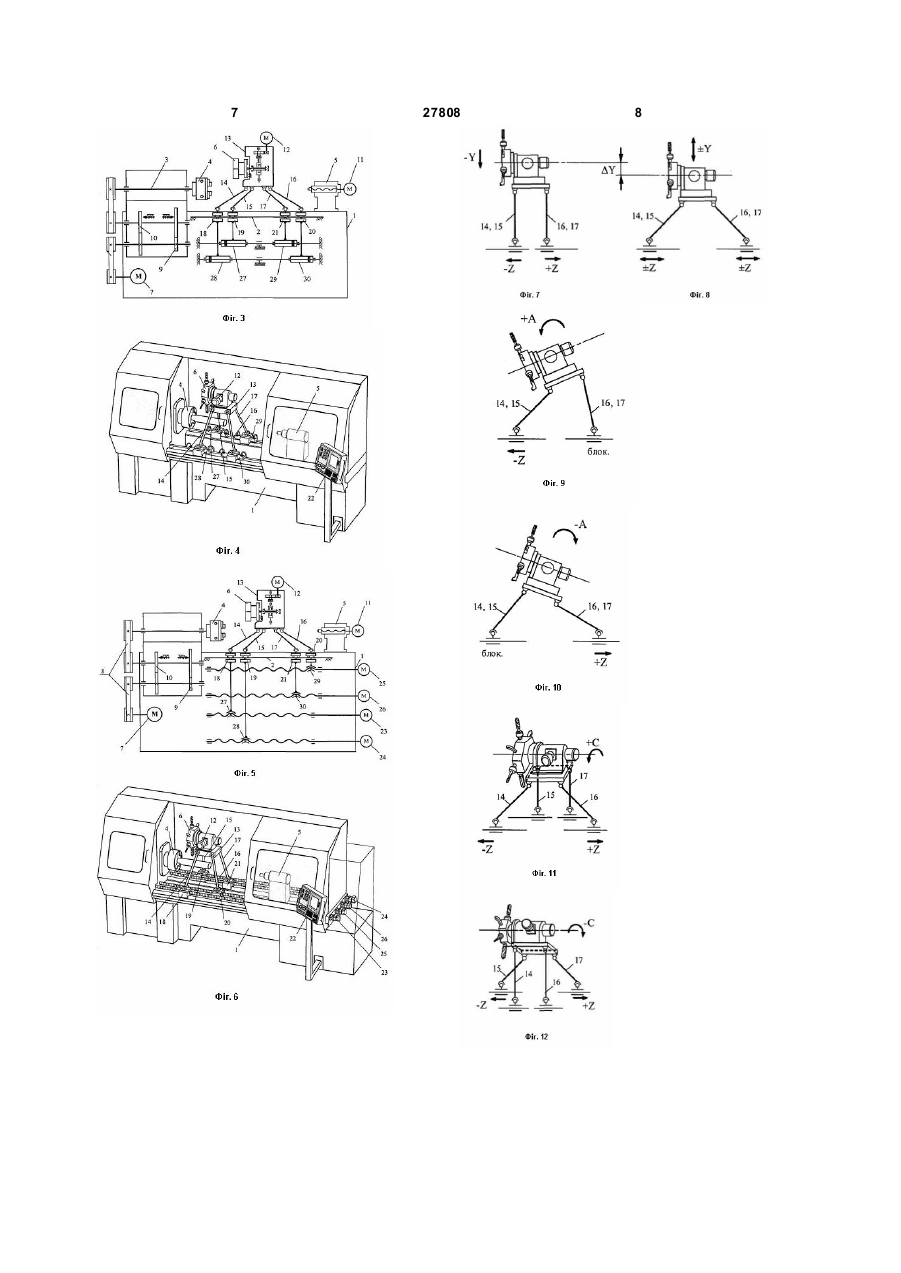
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини з можливістю переміщення по напрямних, який відрізняється тим, що корпус рухомої частини встановлений на штангах постійної довжини, верхні кінці яких шарнірно зв'язані з ним, а кожний нижній кінець 3 27808 4 кронштейнами, на яких розташовані опорні положення в координатному просторі верстату. шарніри важелів вручн у за допомогою гвинта. Тобто кожна штанга постійної довжини є жорсткою Найближчим аналогом, прийнятим за кінематичною ланкою, що зв'язує орган приводу, прототип, обраний токарний багатоцільовий яким є механізм подачі по напрямних верстату, з верстат [3], що містить станину, шпиндельну відомим органом, яким є корпус рухомої частини бабку, із шпиндельним вузлом і затискним де встановлено інструмент. патроном, задню бабку та револьверну головку, Суть корисної моделі пояснюється розташовану на корпусі рухомій частині з кресленнями, де на Фіг.1 зображено кінематичну можливістю переміщення по напрямним. схему верстату з механізмами повздовжньої До недоліків цього верстату відноситься, поподачі у вигляді кульково-гвинтових передач осі перше, обмежені технологічні можливості тому, що яких співвісні між собою попарно; Фіг.2 крім точіння, розточування, нарізання внутрішніх і аксонометричний вид Фіг.1; Фіг.3 - кінематична зовнішніх різьб, гвинтових канавок, на ньому схема верстату з механізмами повздовжньої можна свердлити, зенкерувати, розсвердлювати подачі у вигляді гідро(пневмо) циліндрів; Фіг.4 неспіввісні шпинделю отвори, паралельні і аксонометричний вид верстату Фіг.3; Фіг.5 перпендикулярні шпинделю, але неможливо кінематична схема верстату з механізмами фрезерувати пази, лисок, грані поверхні, повздовжньої подачі, що розташовані по один бік свердління під будь-яким кутом тощо; по-друге, корпуса рухомої частини і паралельні між собою; обмежена кількість рухів інстр ументу при Фіг.6 - аксонометричний вид Фіг.5; Фіг.7 наявності одного хрестового супорту. переміщення револьверної головки в напрямку -Y; В основу корисної моделі поставлена задача Фіг.8 - переміщення револьверної головки в вдосконалити токарний багатоцільовий верстат напрямку +Y; Фіг.9 - обертання револьверної шляхом встановлення корпусу рухомої частини на головки в напрямку +А; Фіг.10 - обертання штангах, що забезпечує розширення револьверної головки в напрямку -А; Фіг.11 технологічних можливостей верстату і збільшення обертання револьверної головки в напрямку +С; кількості рухів інструментів в просторі. Фіг.12 - обертання револьверної головки в Поставлена задача вирішується тим, що в напрямку - С; токарному багатоцільовому верстаті, що містить Верстат містить (Фіг.1) станину 1, з станину з напрямними, шпиндельну бабку із напрямними 2, шпиндельну бабку із шпиндельним шпиндельним вузлом і затискним патроном, задню вузлом 3 і затискним патроном 4, задню бабку 5 і бабку і револьверну головку, розташовану на револьверну інструментальну головку 6, в якій корпусі рухомої частини з можливістю може бути закріплено різальний інструмент для переміщення по напрямним, згідно з корисною точіння і з власним приводом обертання для моделлю, новим є те, що корпус рухомої частини обробки отворів та фрезерування поверхонь. встановлений на штангах, верхні кінці яких Головний рух заготовки забезпечується шарнірно зв'язані з ним, а кожний нижній кінець електродвигуном 7 крізь клинопасову передачу 8, шарнірно зв'язаний з кроковим двигуном через автоматичну коробку швидкостей з перемиканням механізм поздовжньої подачі, розташований двох діапазонів швидкостей зубчатими паралельно осі шпиндельного вузла. передачами 9 і 10 за допомогою електромагнітних Крім того у запропонованому верстаті муфт. Підтиснення довгомірних заготовок центром механізми повздовжньої подачі можуть бути задньої бабки 5 здійснюється за допомогою виконані у вигляді кульково-гвинтових передач, осі електродвигуна 11. Револьверну головку яких співвісні між собою попарно, або у вигляді оснащено власним приводом обертання від гідро(пневмо)циліндрів, штоки яких нерухомі, а електродвигуна 12 і пристроєм фіксації рухомі циліндри шарнірно зв'язані з нижніми інструменту в потрібній позиції. кінцями штанг. Можливо виконання токарного Револьверну головку 6 розташовано на багатоцільового верстата таким, що осі механізмів корпусі рухомої частини 13, що встановлено на повздовжньої подачі, що розташовані по один бік чотирьох штанга х 14, 15, 16, 17 постійної довжини. корпуса рухомої частини, паралельні між собою і Кожна штанга шарнірно зв'язана верхнім оснащені додатковою опорою кочення по кінцем із корпусом рухомої частини 13, а нижнім напрямним станини. кінцем із власним сферичнім шарніром, що За рахунок жорстких кінематичних зв'язків у встановлено на рухому частину 18, 19, 20, 21 вигляді штанг постійної довжини через шарнірні окремого механізму поздовжньої подачі на з'єднання окремого механізму поздовжньої подачі напрямних верстату (Фіг.2). з відповідною точкою на корпусі рухомої частини, Керування рухами верстату забезпечується відбувається самоорієнтація осі револьверної системою числового програмного керування (ЧПК) головки з інструментом. Зміна положення 22 (Фіг.2), яка подає команди на електродвигуни 7, нижнього кінця однієї із штанг залишає без змін 11, 12, а також на електродвигуни 23, 24, 25, 26, положення інших штанг, але викликає зміну що відповідно зв'язані з кульково-гвинтовими положення у просторі рухомої платформи, на якій передачами 27, 28, 29, 30. встановлено інструмент. При одночасному русі Замість кульково-гвинтових передач 27, 28, нижніх опор чотирьох штанг в будь-якій комбінації 29, 30 (Фіг.1) з відповідними електродвигунами 23, з різним значенням поздовжньої подачі і 24, 25, 26 можуть бути використані напрямком відбувається складний рух і орієнтація гідропневмоциліндри (Фіг.3) з такими ж позиціями інструменту за рахунок того, що корпус рухомої 27, 28, 29, 30 (Фіг.3, 4). частини самовстановлюється у відповідне 5 27808 6 Верстат працює наступним чином. Управління зворотнім знаком по осі Z. При цьому, пара штанг подачею і орієнтацією різального інструменту 15, 17 залишається нерухомою (Фіг.11, Фіг.12). виконується комплексно системою ЧПК 22 (Фіг.2) Таким чином рухома інструментальна від чотирьох крокових двигунів 24, 25, 26, 27, платформа має чотири ступені вільності відносно кожен з яких задає рух окремого механізму системи координат верстату (табл.) і керується поздовжньої подачі, на яких встановлено шарніри переміщенням лише по координаті Z нижніх кінців 18, 19, 20, 21 нижніх кінців штанг рухомої частини штанг постійної довжини шарнірно зв'язаних з 13. Для поздовжньої подачі нижніх кінців кожної приводами подач. штанги 14, 15, 16, 17 по напрямним верстату використовується кульково-гвинтові передачі 27, 28, 29, 30 або гідро(пневмо)циліндри, штоки яких нерухомі, а рухомі циліндри шарнірно зв'язані з Поздовжн Керована координата Напрямок нижніми кінцями штанг. За рахунок зміни Штанга 14 Штан положення нижніх кінців штанг відбувається + +Z + Z переміщення і обертання рухомої платформи -Z відносно координатних осей верстату X, Y, Z. + +Z Y В якості варіантів виконання верстату може -Z + бути різне розташування приводів подачі нижніх + -Z бл кінців штанг. Для розширення розмірів робочого +Z бл А простору токарного верстату доцільно паралельне + блок. розташування осей механізмів подач по блок. + напрямних станини (Фіг.6, 7). В такому виконанні + -Z + рухома частина з револьверною головкою може +Z без перешкод руха тись уздовж всієї деталі і за її С + блок. бл межами, над затискним патроном і задньою блок. бл бабкою, наприклад для заміни інструменту. На Фіг.7, Фіг.8, Фіг.9, Фіг.10, Фі г.11, Фіг.12 Джерела інформації окремо показано рухому платформу 1. А.с. СРСР №1576241А1. Токарный інструментальної головки верстату шарнірно многоцелевой станок. МПК В23В3/30, зв'язану штангами 1, 2, 3, 4 як жорсткими заявл.01.08.88, опубл.07.07.90, Бюл. №25. кінематичними ланками з механізмами 2. А.с. СРСР №386713. Устройство для поздовжньої подачі на напрямних верстату. обработки внутренних сферических поверхностей. Закон переміщення і обертання рухомої МПК В23В5/40, заявл.10.09.71, опубл.21.06.73, платформи задає система ЧПК наступним чином. Бюл. №27. Для подачі інструменту уздовж координатної осі Z 3. Токарный станок с ЧПУ мод. КА-440 системою ЧПК забезпечується одночасне (одношпиндельный с одним суппортом). Проспект переміщення нижніх кінців всіх чотирьох штанг в ОАО «Киевский станкостроительный концерн», напрямку +Z або -Z по напрямних верстату. 03062, Киев, просп.Победы, 67, http: Поперечна подача інструменту виконується //www.ldc.net/~ktcv, E-mail: ktcv @ kiev. ldc. net. уздовж координатної осі Y за рахунок одночасних (лінійних) переміщень нижніх кінців штанг попарно 14, 15 і 10, 17 з різним знаком в напрямку осі Z на одну і ту ж відстань. Тобто для руху інстр ументу в напрямку - Y, система ЧПК відпрацює одночасне переміщення поздовжньої подачі штанг 14, 15 в напрямку - Z, а штанг 16, 17 в напрямку +Z (Фіг.3) і навпаки. Не лінійний закон переміщень нижніх кінців штанг приводами поздовжньої подачі дає можливість додавати переміщення по координатах Z і Y рухомої інструментальної платформи і таким чином виконувати обробку фасонних поверхонь обертання. Орієнтація різального інструменту навколо осі X і Z виконується переміщенням приводами подач нижніх кінців однієї пари штанг по напрямним верстату вздовж координати Z на однакову відстань при нерухомих (заблокованих) приводах подач іншої пари штанг. Наприклад, управління координатою А (обертання навколо осі X) інструменту система ЧПК здійснює переміщенням нижніх кінців штанг 14 і 15 на однакову відстань при нерухомих штанга х 16, 17 (Фіг.9, Фіг.10). Для обертання рухомої інструментальної платформи по координаті С система ЧПК відпрацьовує одночасну поздовжню подачу по напрямних верстату нижніх кінців штанги 14 і штанги 16 із 7 27808 8
ДивитисяДодаткова інформація
Назва патенту англійськоюTurning multiuniversal machine tool
Автори англійськоюKuznetsov Yurii Mykolaiovych, Dmytriev Dmytro Oleksiiovych
Назва патенту російськоюТокарный многоцелевой станок
Автори російськоюКузнецов Юрий Николаевич, Дмитриев Дмитрий Алексеевич
МПК / Мітки
Мітки: багатоцільовий, токарний, верстат
Код посилання
<a href="https://ua.patents.su/4-27808-tokarnijj-bagatocilovijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Токарний багатоцільовий верстат</a>
Токарний верстат з числовим програмним керуванням для обробки полігональних поверхонь
Номер патенту: 25411
Опубліковано: 10.08.2007
Автори: Кулаков Іван Сергійович, Самойленко Олексій Васильович, Кузнєцов Юрій Миколайович
МПК: B23B 5/00, B23B 41/00
Мітки: обробки, верстат, поверхонь, числовим, полігональних, керуванням, токарний, програмним
Формула / Реферат:
Токарний верстат з числовим програмним керуванням для обробки полігональних поверхонь, що містить робочий шпиндельний вузол, розміщений в передній бабці та оснащений приводом обертання і датчиком кутового положення заготовки, а також супорт, що встановлений з можливістю переміщення щонайменше вздовж поздовжньої та поперечної осей, оснащений датчиками положення вздовж цих осей, який відрізняється тим, що супорт містить інструментальний...
Токарний верстат
Номер патенту: 9009
Опубліковано: 30.09.1996
Автори: Колінько Борис Степанович, Єгоров Володимир Георгієвич
МПК: B23B 23/00, B23B 3/00
Формула / Реферат:
Токарный станок, содержащий подвижную заднюю бабку с механизмом ее фиксации, выполненным в виде установленного с возможностью перемещения от привода бруса-фиксатора, предназначенного для взаимодействия с рейкой-упором, связанной с задней бабкой, отличающийся тем, что, с целью повышения надежности фиксации задней бабки, она снабжена зубчатым диском-копиром, кинематически связанным с рейкой-упором, элементами управления, предназначенными для...
Малогабаритний токарний верстат
Номер патенту: 28463
Опубліковано: 16.10.2000
Автори: Романіка Костянтин Васильович, Денбський Георгій Вікторович
МПК: B23B 3/00
Мітки: малогабаритний, токарний, верстат
Формула / Реферат:
1. Малогабаритный токарный станок, содержащий: станину, переднюю бабку, заднюю бабку и устройство для перемещения режущего инструмента, в которое входят основание, установленные на нем поперечные салазки, поворотный, круг, продольные салазки в резцедержатель, отличающиеся тем, что станина станка представляет собой плоская прямоугольник, на котором закреплены передняя бабка в две упорно-направляющие планки, имеющие возможность изменять свой...
Малогабаритний токарний верстат з автоматичним переміщенням супорта та задньої бабки
Номер патенту: 56165
Опубліковано: 15.05.2003
Автор: Романіка Костянтин Васильович
МПК: B23B 3/00
Мітки: верстат, переміщенням, супорта, токарний, задньої, бабки, малогабаритний, автоматичним
Формула / Реферат:
1. Малогабаритний токарний верстат з автоматичним переміщенням супорта та задньої бабки, до якого входять станина, передня бабка, упорно-напрямні планки, задня бабка та супорт, що складається з основи, виконаної з можливістю лінійного переміщення паралельно до осі шпинделя та перпендикулярного переміщення зміною довжини упорної колонки, повернутої в бік передньої бабки, та різцетримач, на кожній стороні нижньої частини якого встановлено по...
Токарний верстат для обробки колісних пар без викочування їх з-під локомотива
Номер патенту: 77531
Опубліковано: 15.12.2006
Автори: Луконін Віктор Сергійович, Яцків Ігор Петрович
МПК: B23B 5/08
Мітки: локомотива, колісних, з-під, обробки, верстат, токарний, пар, викочування
Формула / Реферат:
1. Токарний верстат для обробки колісних пар без викочування їх з-під локомотива, який містить станину зі змонтованими на ній засобами піднімання та підтримки оброблюваної колісної пари, роликовими приводами робочого обертання оброблюваної колісної пари та двома розташованими поза зоною роликових приводів супортами, кожний із яких містить каретку з механізмом робочого поздовжнього переміщення, на похилих напрямних якої змонтовані полозки з...
Попередній патент: Газліфтний плунжер
Наступний патент: Теплообмінна труба
Випадковий патент: Подрібнювач кормів універсальний