Пересувна шпалопідбивочна нівеліровочна та рихтовочна машина
Формула / Реферат
1. Подвижная шпалоподбивочная нивелировочная и рихтовочная машина, содержащая установленную на разнесенные ходовыстслежки раму, инструментальную раму с ходовой тележкой, смонтированную между указанными тележками с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, шарнирно соединенными с рамой, и несущую шпалоподбивочный рабочий орган, установленный с возможностью перемещения в вертикальной плоскости приводом, смонтированный перед ним по направлению движения машины выправочный рабочий орган с приводами подъема и рихтовки, при этом шпалоподбивочный рабочий орган включает в себя шпалоподбойки, установленные попарно с возможностью перемещения одна относительно другой и вибрации соответствующими приводами, причем этот орган размещен перед ходовой тележкой инструментальной рамы, на которую последняя установлена одним своим концом, другой ее конец представляет собой продольно ориентированную балку прямоугольного или двутаврового сечения для взаимодействия с роликовой направляющей, смонтированной на раме машины, выправочный рабочий орган смонтирован на одноосной тележке, шарнирно соединенной с инструментальной рамой подъемными и рихтовочными приводами, а передним концом, который выполнен в форме бруса, - с балкой инструментальной рамы, устройство для управления рабочими органами и контрольно-измерительную систему, отличающаяся тем, что, с целью повышения качества обработки железнодорожного пути, она снабжена агрегатом для стабилизации пути, размещенным между инструментальной рамой и задней ходовой тележкой машины и включающим в себя смонтированные на раме вибраторы горизонтальных колебаний и захватные ролики для взаимодействия с рельсами, при этом рама указанного агрегата соединена с рамой машины гидроцилиндром вертикальной нагрузки.
2. Машина по п. 1, отличающаяся тем, что гидроцилиндр вертикальной нагрузки и вибраторы агрегата для стабилизации пути связаны с устройством для управления рабочими органами через контрольно-измерительную систему.
3. Машина по п. 1, отличающаяся тем, что ход поршня гидроцилиндра перемещения инструментальной рамы в горизонтальной плоскости больше двойного расстояния между шпалами.
4. Машина по п. 1, отличающаяся тем, что она снабжена распределителем для синхронного и противотактного по отношению к поступательному движению машины или рамы с агрегатом для стабилизации управления гидроцилиндром перемещения инструментальной рамы в горизонтальной плоскости.
Текст
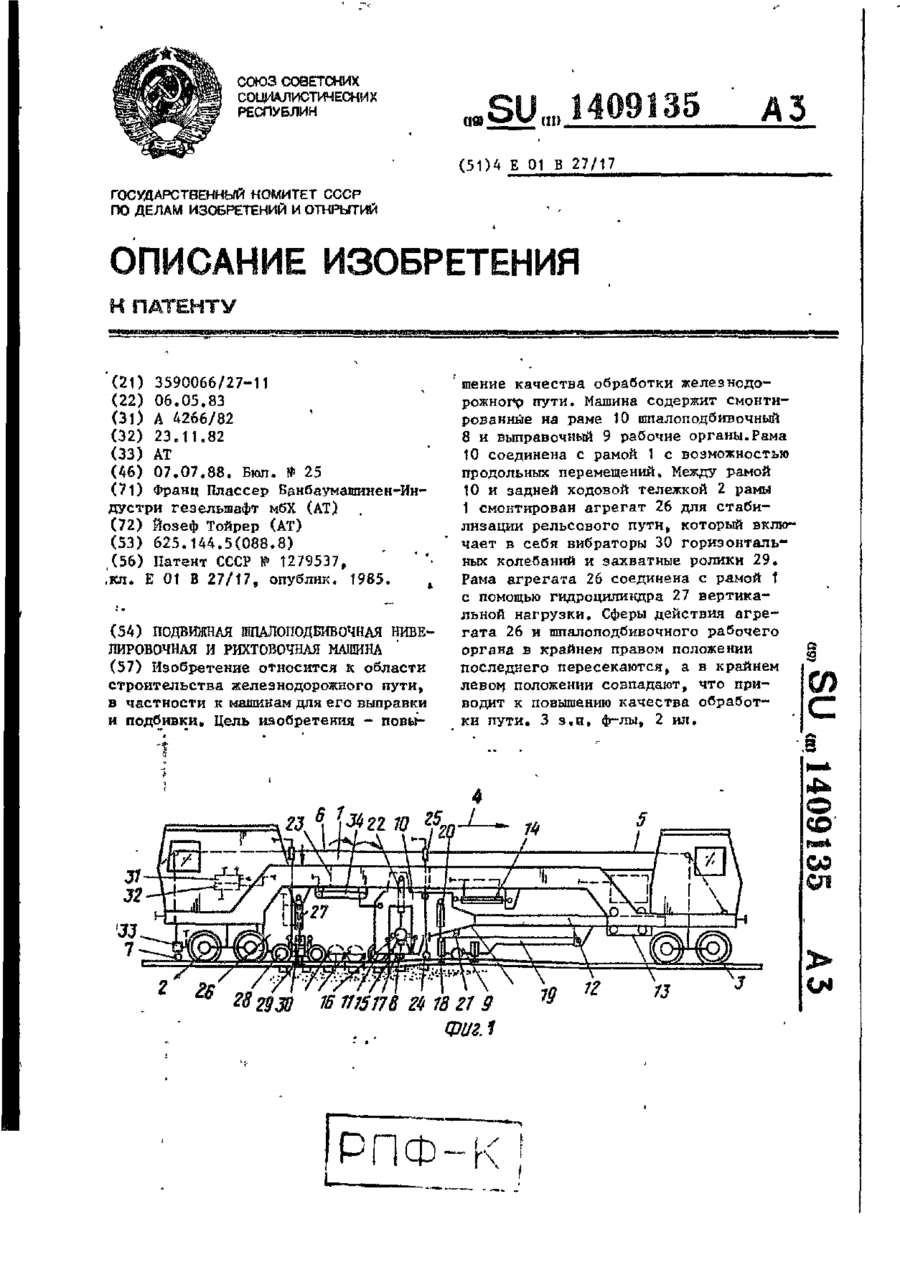
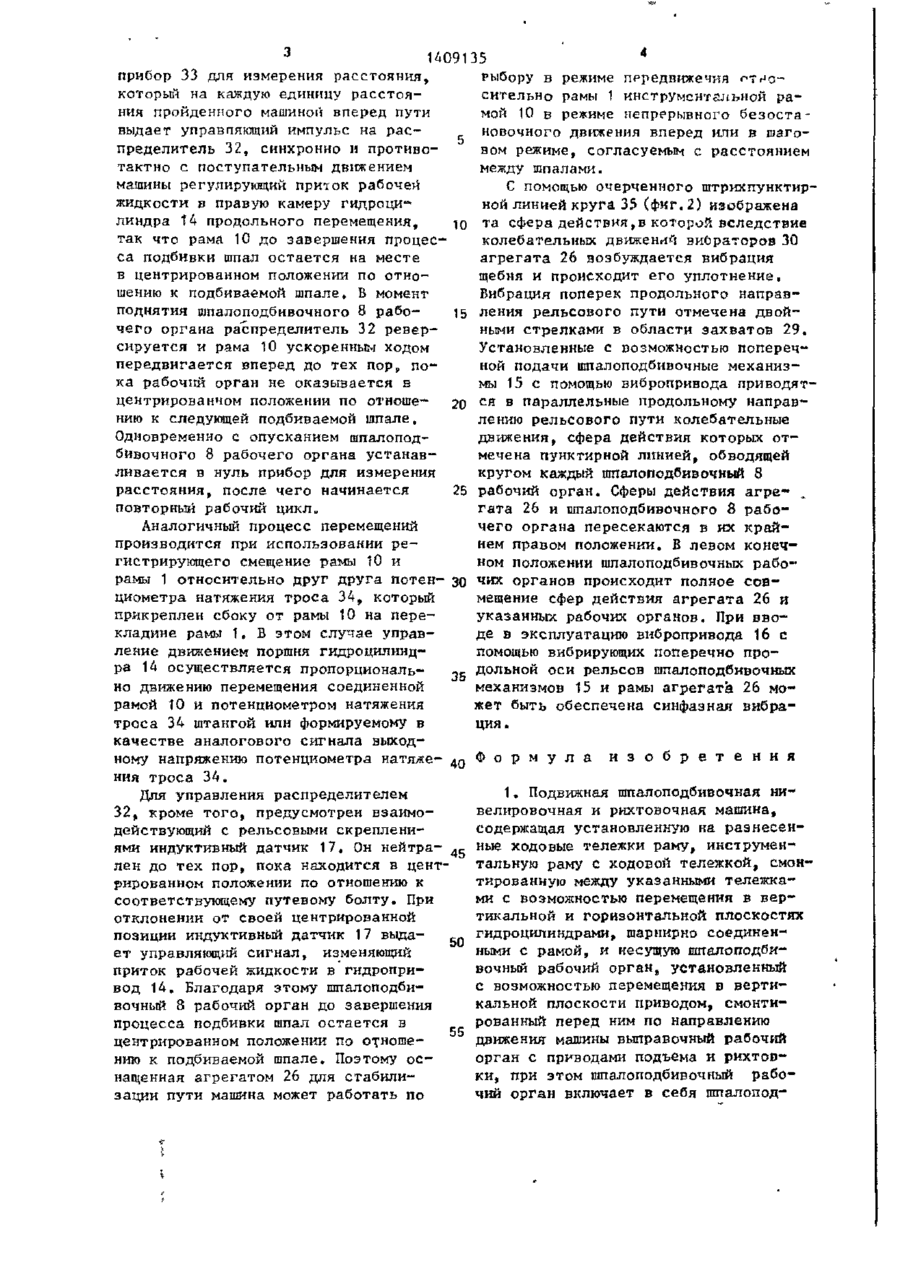
Изобретение относится к области строительства железнодорожного пути, в частности к машинам для его выправки и подбивки. Цель изобретения - повы шение качества обработки железнодорожного пути. Машина содержит смонтированные на раме 10 шпалоподбивочный 8 и выправочиый 9 рабочие органы.Рама 10 соединена с рамой 1 с возможностью продольных перемещений. Между рамой 10 и задней ходовой тележкой 2 рамы 1 смонтирован агрегат 26 для стабилизации рельсового пути, который включает в себя вибраторы 30 горизонтальных колебаний и захватные ролики 29, Рама агрегата 26 соединена с рамой t с помощью гидроцилиндра 27 вертикальной нагрузки. Сферы действия агрегата 26 и шпалоподбивочного рабочего органа в крайнем правом положении последнего пересекаются, а в крайнем левоіч положении совпадают, что приводит к повышению качества обработки пути. 3 з,н, ф-лы, 2 ил. § 76 П75178 24 18 27 9 Фиг. 1 РПФ 1 1409135 Изобретение относится к строительству железнодорожного пути, в частности к машинам для его выправки и подбивки. Цель изобретения - повышение качества обработки железнодорожного пути. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид сверху. Машина содержит раму 1, перекатываемую с помощью ходовых тележек 2 и 3 по железнодорожному пути. Направление рабочего хода машины отмечено (5 стрелкой 4, Машина оснащена контрольно-измерительной системой 5, которая имеет трос 6 для каждого рельса. Передний конец каждого троСа направляется через ходовую тележку 3 по 20 невыправленному пути,а его задний конец через щуп 7 ~ по выправленному пути. Рабочий узел состоит из шпалоподбивочного 8 и выправочного 9 рабочих органов с соответствующими при- 25 водами' и размещен на инструментальной раме 10, Рама 10 выполнена в виде одноосной тележки и опирается одним концом на рельсовый путь через ходовую тележку 11 s а другим своим концом тарнирно соединена с рамой 1. Соединенный с рамой 1 конец рамы 10 выполнен в виде продольно ориентированной балки 12 прямоугольного или двутаврового сечения для взаимодействия с направ- 35 ляющей 13 из роликов, снабженных с обеих сторон направляющими буртиками и установленных с возможностью поворота на раме 1, Боковой зазор между балкой 12 и буртиками роликов обеспечивает возможность поворота рамы 10 вокруг ее опорного участка на раме 1. Инструментальная рама 10 установлена с возможностью продольного 45 перемещения относитгльно рамы 1 гидроцилиндром 14. бивочного рабочего органа относителі но шпалы служит индуктивный датчик 17, смонтированный на раме 10. Выправочный 9 рабочий орган содержит направляемую по рельсовому пути с помощью рихтовочных роликов и оснащенную поворачиваемыми под головкой рельсов подъемными роликами 1 8 раму 19, представляющую собой одноосную тележку,шарнирно соединенную своим передним концом с инструментальной рамой 10, Кроме того, рама 19 соединена с рамой 10 через путеподъемные 20 и рихтовочные 21 приводы. Для того чтобы не мешать работе приводов 22 регулировки шпалоподбивочного рабочего органа 8 по высоте рама 1 выполнена с проемом 23, В области между шпалоподбивочным 8 и выправочньгм 9 рабочими органами предусмотрен измерительный инструмент 24, с которым соединен один на каждый рельс, выполненный, например, в виде потенциометра с поворотным движком, измерительный щуп 25, взаимодействующий с тросом 6. Между инструментальной рамой 10 и ходовой тележкой 2 установлен агрегат 26 для стабилизации пути, соединенный с рамой 1 гидроприводом 27. Агрегат 26 содержит направляющие ребордные ролики 28 и рельсовые захваты 29, смонтированные с возможностью поворота в поперечной вертикальной плоскости. Для создания колебаний в поперечной горизонтальной плоскости установлены вибраторы 30. Эти колебания, а также прикладываемые гидроприводами 27 нагрузки передаются на рельсовый путь через ролики 28 и захваты 29. Машина оснащена различными дополнительными устройствами, которые позволяют осуществлять автоматическое управление различными функциями перемещения при непрерывном безостаШпалоподбивочный рабочий орган 8 новочном поступательном движении масодержит погружаемые в щебень шпалошины и шаговом продвижении инстру50 подбивочные механизмы 15, которые ментальной рамы 10 от одного участчерез гидравлические эксцентриковые ка подбивки шпал к другому, такими виброприводы приводятся в параллелькак устройство 31 управления и расные рельсам колебательные движения. пределитель 32. Кроме того, механизмы 15 могут быть Распределитель 32 для обеспече55 ния управления связан с тремя разлисоединены с ви&роприводом 16 для сообщения им колебательных движений чными дополнительными приборами. Одв поперечной направлению пути плосним из этих приборов является конкости. Для ориентирования шпалоподструктивно объединенный со щупом 7 1409135 прибор 33 для измерения расстояния, рыбору в режиме передвижения отнокоторый на каждую единицу расстоясительно рамы 1 инструментальной рания пройденного машиной вперед пути мой 10 в режиме непрерывного безоста выдает управпяющий импульс на расновочного движения вперед или в шагопределитель 32, синхронно и противовом режиме, согласуемым с расстоянием тактно с поступательным движением между шпалами. машины регулирующий приток рабочей С помощью очерченного штрихпунктиржидкости в правую камеру гидроциной линией круга 35 (фкг. 2) изображена линдра 14 продольного перемещения, ю та сфера действия,в которой вследствие так что рама 10 до завершения процесколебательных движений вибраторов 30 са подбивки шпал остается на месте агрегата 26 возбуждается вибрация в центрированном положении по отнощебня и происходит его уплотнение. шению к подбиваемой шпале. В момент Вибрация поперек продольного направподнятия шпалоподбивочного 8 рабо15 ления рельсового пути отмечена двойчего органа распределитель 3 2 реверными стрелками в области захватов 29. сируется и рама 10 ускоренным ходом Установленные с возможностью поперечпередвигается вперед до тех пор, поной подачи шпалоподбивочные механизка рабочий орган не оказывается в мы 15 с помощью вибропривода приводятцентрированном положении по отноше- 20 ся в параллельные продольному направнию к следующей подбиваемой шпале. лению рельсового пути колебательные Одновременно с опусканием шпалоподдвижения, сфера действия которых отбивочного 8 рабочего органа устанавмечена пунктирной линией, обводящей ливается в нуль прибор для измерения кругом каждый шпалоподбивочкый 8 расстояния, после чего начинается 25 рабочий орган. Сферы действия агреповторный рабочий цикль гата 26 и шпалоподбивочного 8 рабоАналогичный процесс перемещений чего органа пересекаются в их крайпроизводится при использовании ренем правом положении. В левом конечгистрирующего смещение рамы 10 и ном положении шпалоподбивочных раборамы 1 относительно друг друга потен- 30 чих органов происходит полное совциометра натяжения троса 34, который мещение сфер действия агрегата 26 и прикреплен сбоку от рамы 10 на переуказанных рабочих органов. При ввокладине рамы 1. В этом случае управде в эксплуатацию внбропривода 16 с ление движением поршня гидроцилиндпомощью вибрирующих поперечно прора 14 осуществляется пропорциональ^ с дольной оси рельсов шпалоподбивочных но движению перемещения соединенной механизмов 15 и рамы агрегата 26 морамой 10 и потенциометром натяжения жет быть обеспечена синфазная вибратроса 34 штангой или формируемому в ция. качестве аналогового сигнала выходи з о б р е т е н и я ному напряжению потенциометра натяже- 4 0 Ф о р м у л а ния троса 34, 1. Подвижная шпалоподбивочная ниДля управления распределителем велировочная и рихтовочная машина, 32, кроме того, предусмотрен взаимосодержащая установленную на разнесендействующий с рельсовыми скреплениями индуктивный датчик 17. Он нейтра- 4 5 ные ходовые тележки раму, инструментальную раму с ходовой тележкой, смонлен до тех пор, пока находится в центтированную между указанными тележкарированном положении по отношению к ми с возможностью перемещения в версоответствующему путевому болту. При тикальной и горизонтальной плоскостях отклонении от своей центрированной гидроцилиндрами, шарнирно соединенпозиции индуктивный датчик 17 выда50 ными с рамой, и кесущуто шпалоподбиет управляющий сигнал, изменяющий вочный рабочий орган, установленный приток рабочей жидкости в гидроприс возможностью перемещения в вертивод 14. Благодаря этому шпалоподбикальной плоскости приводом, смонтивочный 8 рабочий орган до завершения рованный перед ним по направлению процесса подбивки шпал остается в 55 движения машины выправочный рабочий центрированном положении по отношеорган с приводами подъема и рихтовнию к подбиваемой шпале. Поэтому оски, при этом шпалоподбивочный рабонащенная агрегатом 26 для стабиличий орган включает в себя шпалоподзации пути машина может работать по 1409135 бойки, установленные попарно с возсмонтированные на раме вибраторы можностью перемещения одна относигоризонтальных колебаний и захватные тельно другой и вибрации соответстропики для взаимодействия с рельсавующими приводами, причем этот орган ми, при этом рама указанного агрегаразмещен перед ходовой тележкой инта соединена с рамой машины гидрострументальной рамы., на которую поцилиндром вертикальной нагрузки, следняя установлена одним своим кон2. Машина по п. 1, о т л и ч а цом, другой ее конец "представляет сою щ а я с я тем, что гидроцилиндр бой продольно ориентированную балку ю вертикальной нагрузки и вибраторы прямоугольного или двутаврового сеагрегата для стабилизации пути свячения для взаимодействия с роликовой заны с устройством для управления направляющей, смонтированной на раме рабочими органами через контрольномашины, выправочный рабочий орган измерительную систему, смонтирован на одноосной тележке, 15 3. Машина по п. 1, о т л и ч а шарнирно соединенной с инструменталью щ а я с я тем, что ход поршня гидной рамой подъемными и рихтовочныроцилиндра перемещения инструментальми приводами, а передним концом,, ной рамы в горизонтальной плоскости который выполнен в форме бруса, больше двойного расстояния между шпас балкой инструментальной рамы, уст- 20 лами. ройство для управления рабочими ор4. Машина п о п , 1, о т л и ч а ганами и контрольно-измерительную і ю щ а я с я тем, что она снабжена систему, о т л и ч а ю щ а я с я распределителем для синхронного и тем, что, с целью повышения качестпротивотактного по отношению к пова обработки железнодорожного пути, 25 ступательному движению машины или она снабжена агрегатом для стабилирамы с агрегатом для стабилизации зации пути э размеще:4ным между инступравления гидроцилиндром перемещения рументальной рамой и задней ходовой инструментальной рамы в горизонтальтележкой машины и включающим в себя ной плоскости. 26 35 23 21 79 Л WU2.2 Редактор Ft, Бланар Составитель Т. Кагаликова Техред М.Дидык Корректор Э.Лончакова Заказ 3364/59 Тираж 517 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий Ї13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. ^Ужгород, ул. Проектная, 4 W м 1 '\' Т
ДивитисяДодаткова інформація
Назва патенту англійськоюMovable tie-tamping leveling and straightening machine
Назва патенту російськоюПодвижная шпалоподбивочная нивелировочная и рихтовочная машина
МПК / Мітки
МПК: E01B 27/17
Мітки: пересувна, шпалопідбивочна, машина, рихтовочна, нівеліровочна
Код посилання
<a href="https://ua.patents.su/4-3605-peresuvna-shpalopidbivochna-nivelirovochna-ta-rikhtovochna-mashina.html" target="_blank" rel="follow" title="База патентів України">Пересувна шпалопідбивочна нівеліровочна та рихтовочна машина</a>
Шпалопідбивочна машина

Номер патенту: 3620
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/16
Мітки: машина, шпалопідбивочна
Формула / Реферат:
Шпалоподбивочная машина, содержащая установленную на ходовые тележки раму, шпалоподбивочный агрегат, смонтированный на раме с возможностью перемещения в вертикальной плоскости приводом и состоящий из инструментальной рамы, установленных на ней шпалоподбивочных инструментов, размещенных по две пары с обеих сторон от продольной оси машины, виброприводов и приводов подачи шпалоподбивочных инструментов, отличающаяся тем, что, с целью...
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йоханн Хансманн, Йьора Ганц
МПК: E01B 27/17
Мітки: пересувна, процесі, машина, роботи, виправочнопідбивочно-обробна, безперервної
Формула / Реферат:
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Пересувна машина для виправки залізничного шляху у плані та профілі в зонах стрілочних переведень
Номер патенту: 3603
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 35/00, E01B 27/17
Мітки: профілі, плані, шляху, пересувна, залізничного, зонах, стрілочних, виправки, переведень, машина
Формула / Реферат:
1. Передвижная машина для выправки железнодорожного пути в плане и профиле в зоне стрелочных переводов, содержащая самоходное железнодорожное шасси, на раме которого смонтированы шпалоподбивочный агрегат, инструментальная рама, установленная относительно рамы шасси с возможностью перемещения в вертикальной плоскости гидроцилиндрами и несущая подъемно-рихтовочный агрегат, состоящий из по меньшей мере од ной пары колес с ребордам и, одного...
Машина для виправлення залізничного шляху
Номер патенту: 3574
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: шляху, залізничного, виправлення, машина
Формула / Реферат:
1. Машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, гидроцилиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для каждого рельса пути, причем каждый захват включает в себя два опорных элемента для рабочей рамы, один из...
Машина для заміни шпал залізничної колії
Номер патенту: 3621
Опубліковано: 27.12.1994
Автори: Херберт Вьоргьоттер, Йоханн Хансманн, Йозеф Тойрер
МПК: E01B 29/00
Мітки: колії, машина, залізничної, шпал, заміни
Формула / Реферат:
1. Машина для замены шпал железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, привод перемещения тележек, смонтированные на раме управляющее устроиство и устройство для замены шпал, состоящее из шпальных клещей с приводом их зажима и приводов перемещения этих клещей по высоте, поперек и вдоль машины, отличающаяся тем, что, с целью повышения производительности, она снабжена смонтирован ны м и на рамс вблизи устройства для...
Попередній патент: Пересувна машина для виправки залізничного шляху у плані та профілі в зонах стрілочних переведень
Наступний патент: Пересувна машина для приймання, очищення та транспортування баласту
Випадковий патент: Блочний механізм стопоріння тягового органа скребкового конвеєра