Безплатформна інерціальна навігаційна система
Номер патенту: 36469
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Субота Анатолій Максимович, Фірсов Сергій Миколайович, Хохлов Олександр Дмитрович, Кулік Анатолій Степанович

Формула / Реферат
Безплатформна інерціальна навігаційна система, що містить основу, блок із трьох акселерометрів, блок із трьох датчиків кутових швидкостей, розраховувач вектора стану, входи якого зв'язані з блоком датчиків кутових швидкостей та блоком акселерометрів, програмні механізми кутового розвороту, число яких відповідає числу датчиків кутових швидкостей в блоці датчиків кутових швидкостей, яка відрізняється тим, що в блок датчиків кутових швидкостей введено додатково четвертий датчик кутової швидкості, який розміщується в точці перетину діагоналей корпусу блока датчиків кутових швидкостей (куба) на відстані ![]() , де
, де ![]() - відстань від центра системи до інших датчиків, а також в блок акселерометрів додатково введений четвертий акселерометр, який розміщується в точці перетину діагоналей корпусу блока акселерометрів (куба) на відстані
- відстань від центра системи до інших датчиків, а також в блок акселерометрів додатково введений четвертий акселерометр, який розміщується в точці перетину діагоналей корпусу блока акселерометрів (куба) на відстані ![]() , де
, де ![]() - відстань від центра системи до інших датчиків.
- відстань від центра системи до інших датчиків.
Текст
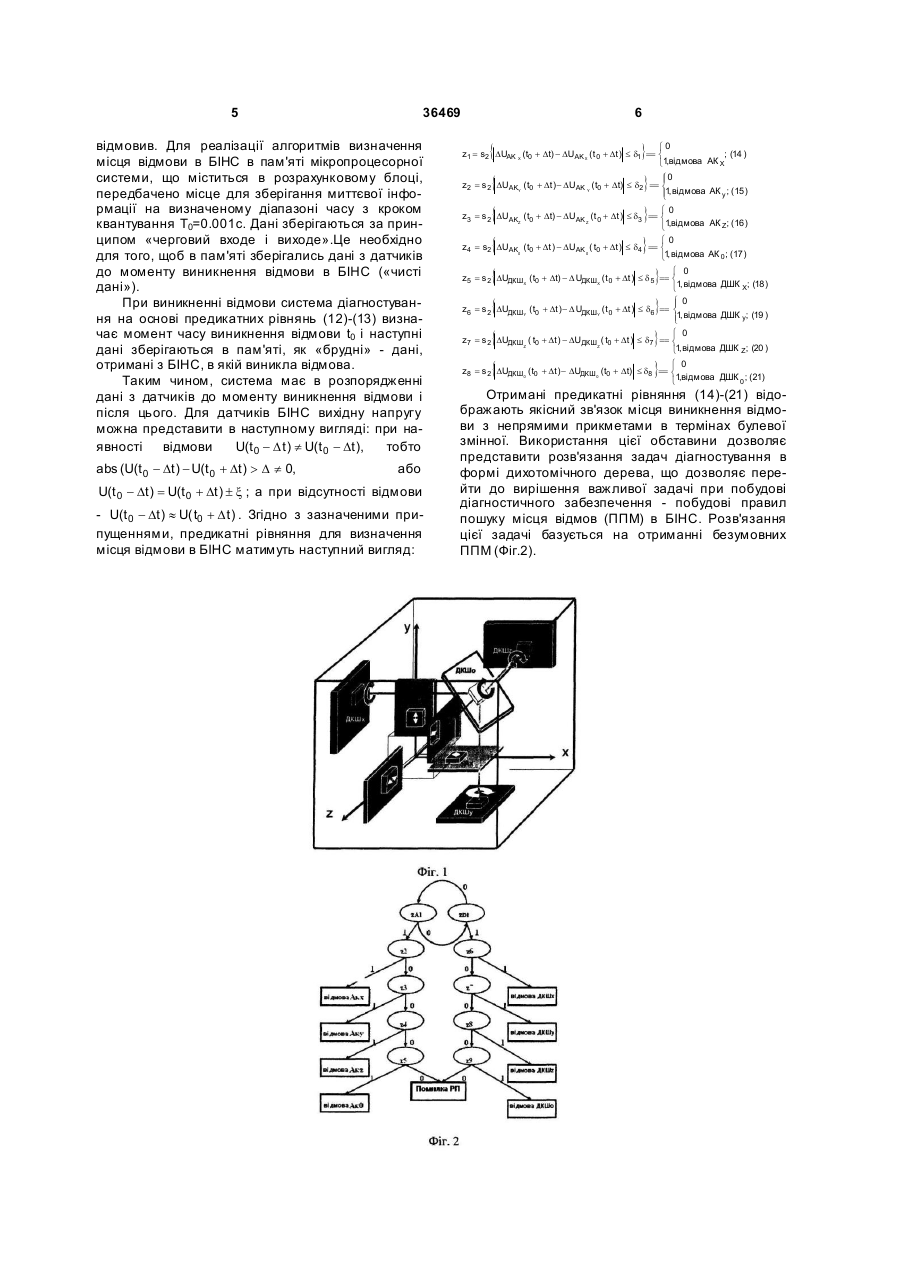
Безплатформна інерціальна навігаційна система, що містить основу, блок із трьох акселерометрів, блок із трьох датчиків кутових швидкостей, розраховувач вектора стану, входи якого зв'язані з блоком датчиків кутових швидкостей та блоком акселерометрів, програмні механізми кутового розвороту, число яких відповідає числу датчиків кутови х швидкостей в блоці датчиків кутових швидкостей, яка відрізняється тим, що в блок датчиків кутових швидкостей введено додатково четвертий датчик кутової швидкості, який розміщується в точці перетину діагоналей корпусу блока датчиків кутових швидкостей (куба) на відстані Корисна модель відноситься до систем орієнтації та навігації рухомих об'єктів і може бути використована в авіакосмічній техніці. Відома безплатформенна інерційна навігаційна система (БІНС), яка взята в якості прототипу, до її складу входять: блок із трьох акселерометрів, блок із трьох датчиків кутових швидкостей, розраховувач вектору стану об'єкта та механізми програмного розвороту датчиків кутової швидкості [див.: Патент Російської Федерації №2011169, G01 С21/00, опубл. 15.04.94 Бюл. №7]. Недоліком такої системи являється те, що маючи досить високу точність програмного розвороту датчиків кутової швидкості та незалежність від впливу масштабного коефіцієнта, система являється повністю не відмовостійкою. Тобто при незадовільній роботі одного із датчиків кутових швидкостей, або акселерометра вся система буде непрацездатною. Задачею корисної моделі є підвищення надійності системи, забезпечення її працездатності, необхідної точності управління та якості перехідних процесів за наявності відмов одного із датчиків кутови х швидкостей або акселерометра. Поставлена задача досягається тим, що в безплатформенну інерціальну навігаційну систему, що містить основу, блок із трьох акселерометрів, блок із трьох датчиків кутови х швидкостей, розраховувач вектору стану, входи якого зв'язані з блоком датчиків кутових швидкостей та блоком акселерометрів, програмні механізми кутового розвороту, число яких відповідає числу датчиків кутови х швидкостей в блоці датчиків кутових швидкостей, яка відрізняється тим, що в блок датчиків кутови х швидкостей введено додатково четвертий датчик кутової швидкості, який розміщується в точці перетину діагоналей корпусу блоку датчиків кутови х швидкостей (кубу) на відстані 3 R , де R - відстань від центра системи до інших датчиків, а також в блок акселерометрів додатково введений четвертий акселерометр, який розміщується в точці перетину діагоналей корпусу блока (13) 36469 (11) UA ку акселерометрів (кубу) на відстані 3 R , де R відстань від центра системи до інших датчиків. Так як БІНС належить до об'єктів діагностування з невідомим входом, то єдиний шлях для забезпечення виконання критерію структурного діагностування, являється введення структурної надлишковості. Одним із прикладів введення структурної надлишковості, є мажоритарна схема включення чутливого елемента (ЧЕ) в БІНС - по три акселерометра і три датчика кутових швидкостей по кожній осі зв'язаної з об'єктом системи координат. Але, незважаючи на те, що вказана схема забезпечує повне діагностування БІНС з (19) 3 R , де R - відстань від центра системи до інших датчиків, а також, в блок акселерометрів додатково введений четвертий акселерометр, який розміщується в точці перетину діагоналей корпусу бло U акселерометрів (куба) на відстані 3 R , де R відстань від центра системи до інших датчиків. 3 36469 4 глибиною до місця відмови, введення великої кільде a¢ (k ) - величина вихідного сигналу акселе0 кості ЧЕ призводить до збільшення маси, габарирометра А0; RAo - відстань від початку координат тів та енергозабезпечення БІНС. Дане обмеження до точки встановлення А0; w¢ (k) - величина вихід0 визначає актуальність проектування БІНС з мініного сигналу ДКШ0. мальною структурною надлишковістю, котра доНа основі залежностей (1)-(3) при умові викозволяє забезпечити структурне діагностування нання тотожності БІНС з глибиною до місця відмови. Варіант БІНС з мінімальною структурною над= 3 R АК X = = 3 R АК Z R= 3 R залежно3R АК Y A0 лишковістю представлений на Фіг.1. сті (5) матимуть наступний вигляд: Цей варіант БІНС з структурною надлишковістю складається з 4-х акселерометрів (Ах, Ay, Az, Ао) та чотирьох датчиків кутової швидкості ДКШх, a¢ (k ) = a¢ (k ) + a¢y (k) + a¢ (k )) / 3 ( 7) 0 x z ДКШу, ДКШz и ДКШо. Для простоти пояснення пеНа виході датчиків БІНС формується сигнал в реваги конструкції БІНС, що пропонується, допусвигляді напруги постійного струму. Опираючись на тимо, що центр мас тригранника, що вимірює, це, введемо наступні позначення: співпадає з центром мас об'єкта. Осі чутливості Ах, UAK (k), UAK (k ),UAK (k ),U AK (k ), UДУС (k ),U ДУС (k), U ДУС (k ),U ДУС (k ) Ау, Az і ДКШ х, ДКШ у, ДКШz співпадають з осями величина напруги на виходах датчиків Ах, Ay, AZ, зв'язаної з об'єктом системи координат Ох, О у, Oz, А0 , ДКШ х, ДКШ у, ДКШZ и ДКШ0, відповідно в k-й відповідно. Всі шість датчиків розміщуються на відстані R від початку системи координат. Вісь момент часу. Так як в БІНС використовуються однотипні акселерометри і ДКШ, то залежності (6)-(7) чутливості акселерометра Ао та датчика кутової за умови врахування введених позначень будуть швидкості ДКШо співпадають з діагоналлю куба, мати наступний вигляд: котрий утворюється осями чутливості Ах, Ау, Az і ДКШх, ДКШ у, ДКШz, відповідно. Датчик Ао і ДКШо U (k ) = U (k ) + U (k ) + U (k )) / 3 ; (8 ) X знаходяться на відстані 3 R від початку координат. Враховуючи розміщення ЧЕ та вплив на показання акселерометрів проекцій кутової швидкості на осі зв'язаної системи координат, значення виходиш сигналів Ах, Ау, Az, ДКШ х, ДКШ у, ДКШz будуть визначатися наступними рівняннями: 2 2 2 2 2 2 a¢ (k ) = a x(k ) - (( wy (k)) + ( wz(k )) )R AK X ; (1) x a¢ (k ) = a y(k ) - (( wy (k)) + ( wz(k )) )R AK Y ; ( 2) y a¢ (k ) = az (k ) - ((wy (k )) + (wz (k )) )R AK Z ; (3) z w¢x(k ) = wx (k ); w¢y(k ) = wy (k ); w¢z(k ) = wz (k ); (4) y Z AK 0 0 X AK X AK Y y Z 0 AK Z UДУС0 (k ) = U ДУСX (k ) + U ДУСY (k) + UДУСZ (k)) / 3 . (9 ) Тотожності (8)-(9) являються математичними моделями номінального функціонування блоків акселерометрів та ДКШ БІНС. Взявши за основу тотожності (8)-(9) отримаємо динамічні моделі для розв'язання першої задачі діагностування - визначення відмов в блоках ДКШ та акселерометрах: ~ ~ ~ D U AK0 (k ) = U AK 0 (k ) - U AK X (k ) + U AK Z (k )) / 3 ; (10 ) ~ ~ ~ ~ D U ДУС 0 (k ) = U ДУС 0 (k ) - U ДУС X ( k ) + U ДУС Y (k ) + U ДУС Z (k )) / 3 , (11) де RAK X = RAK y = R AK Z = R - відстань від по де DUAK 0 (k), DUДУС0 (k ) - відхилення сумарних чатку координат до акселерометрів Ах, Ау, Az відповідно; a ¢ (k ), a ¢y (k ), a¢z (k ) - величини вихідних x сигналів вксєлєромєтрів Ах, Ау, Az відповідно; a x (k ), a y (k ), a z (k ) - проекції уявних прискорень на осі чутливості акселерометрів Ах, Ay, Az; w x (k ), w y (k ), w z (k ) - проекції кутової швидкості обертання на осі зв’язаної системи координат; w¢x (k ), w¢y (k ), w¢z (k ) - значення вихідних сигналів ДКШх, ДКШ у, ДКШz, відповідно; k - дискретні моменти часу вимірювання. Для спрощення запису, крок квантування не враховуємо. Так як осі чутливості Ао і ДКШо співпадають з діагоналями кубу (Фіг.1), то їх показання будуть визначатися наступними аналітичними залежностями: 1 a 0 (k ) = ¢ ax (k ) + ay (k ) + az(k )) 3 2 2 2 2 ((w x(k )) + (w y(k )) + (w z(k )) ) R Ao ; ( 5) 3 ¢ w0 (k ) = ( wx (k ) + wy (k) + w z(k )) / 3 (6) напруг на Ах, Ay, Az , ДКШх, ДКШ у, ДКШz від напруги на А0 і ДКШ0, відповідно; ~ ~ ~ ~ ~ UAK 0 (k), U ДУСX (k), U ДУСY (k ),U ДУСZ , U ДУС0 (k) - напруги на виходах датчиків Ax, Ay, Az , А0, ДКШ х, ДКШ у, ДКШz, ДКШ0 в k-й момент часу, відповідно. На основі отриманих моделей (10)-(11) формуємо предикатні рівняння: { z = s {DU } (k ) £ d } , i = 5 ¸ 8; (13 ) 1 zi = s2 DU AK (k ) £ di , i = 1 ¸ 4; (12) i 2 0 AK 0 0 1 i 0 де zi - двохзначні предикати, які описують процес порівняння величин напруги; s 2 - символ двохзначного предикатного рівняння; di – допустимі значення розузгодження сигналів, котрі визначаються шляхом експерименту. Отримані предикатні рівняння (12)-(13) дозволяють сформувати алгоритм для розв'язання першої задачі діагностування - визначення відмови в БІНС. Після розв’язання першої задачі діагностування, необхідно позбавитися наступної невизначеності - визначення місця виникнення відмови в БІНС, тобто визначення безпосередньо датчика, котрий 5 36469 відмовив. Для реалізації алгоритмів визначення місця відмови в БІНС в пам'яті мікропроцесорної системи, що міститься в розрахунковому блоці, передбачено місце для зберігання миттєвої інформації на визначеному діапазоні часу з кроком квантування Т0=0.001с. Дані зберігаються за принципом «черговий входе і виходе».Це необхідно для того, щоб в пам'яті зберігались дані з датчиків до моменту виникнення відмови в БІНС («чисті дані»). При виникненні відмови система діагностування на основі предикатних рівнянь (12)-(13) визначає момент часу виникнення відмови t0 і наступні дані зберігаються в пам'яті, як «брудні» - дані, отримані з БІНС, в якій виникла відмова. Таким чином, система має в розпорядженні дані з датчиків до моменту виникнення відмови і після цього. Для датчиків БІНС вихідну напругу можна представити в наступному вигляді: при наявності відмови U(t 0 - D t ) ¹ U(t 0 - Dt ), тобто abs (U(t 0 - Dt ) - U(t 0 + Dt ) > D ¹ 0, або = U(t 0 + Dt ) ± x ; а при відсутності відмови U(t 0 - Dt ) - U(t 0 - Dt ) » U( t0 + D t ) . Згідно з зазначеними припущеннями, предикатні рівняння для визначення місця відмови в БІНС матимуть наступний вигляд: 6 { } { } { } { } ì0 z1 = s2 DUAK X (t0 + Dt) - DUAK X (t 0 + Dt ) £ d1== í ; (14 ) î1,відмова АК X ì ï0 z2 = s 2 DUAKY (t0 + Dt )- DUAK Y (t0 + Dt) £ d2 == í ï1, відмова АК y ; (15 ) î ì0 z3 = s 2 DUAKZ (t0 + Dt) - DUAK Z (t 0 + Dt ) £ d3 == í î1,відмова АК Z; (16 ) ì0 z4 = s2 DUAK0 (t0 + Dt ) - DUAK 0 ( t0 + Dt ) £ d4 == í î1, відмова АК 0 ; (17 ) ì 0 z5 = s 2 DUДКШX (t0 + Dt) - D UДКШX (t 0 + Dt ) £ d 5 == í î1, відмова ДШК X; (18 ) { } { } { } { } ì ï 0 z6 = s 2 DUДКШY (t0 + Dt )- D UДКШY (t 0 + Dt ) £ d6 == í ï1, відмова ДШК y; (19 ) î ì 0 z7 = s 2 DUДКШZ ( t0 + Dt ) - DUДКШZ ( t0 + Dt ) £ d7 == í î1, відмова ДШК Z; (20 ) ì 0 z8 = s 2 DUДКШ0 (t0 + Dt )- DUДКШ0 (t0 + Dt) £ d8 == í î1,відмова ДШК 0 ; (21) Отримані предикатні рівняння (14)-(21) відображають якісний зв'язок місця виникнення відмови з непрямими прикметами в термінах булевої змінної. Використання цієї обставини дозволяє представити розв'язання задач діагностування в формі дихотомічного дерева, що дозволяє перейти до вирішення важливої задачі при побудові діагностичного забезпечення - побудові правил пошуку місця відмов (ППМ) в БІНС. Розв'язання цієї задачі базується на отриманні безумовних ППМ (Фіг.2). 7 Комп’ютерна в ерстка Л. Купенко 36469 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPlatform-less inertial navigation system
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Firsov Serhii Mykolaiovych, Bandura Ivan Mykolaiovych, Khokhlov Oleksandr Dmytrovych
Назва патенту російськоюБесплатформная инерциальная навигационная система
Автори російськоюКулик Анатолий Степанович, Суббота Анатолий Максимович, Фирсов Сергей Николаевич, Бандура Иван Николаевич, Хохлов Александр Дмитриевич
МПК / Мітки
МПК: G01C 21/00
Мітки: система, інерціальна, безплатформна, навігаційна
Код посилання
<a href="https://ua.patents.su/4-36469-bezplatformna-inercialna-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Безплатформна інерціальна навігаційна система</a>
Інтегрована навігаційна система
Номер патенту: 15785
Опубліковано: 17.07.2006
Автор: Борисевич Павло Андрійович
МПК: G01C 21/10
Мітки: інтегрована, навігаційна, система
Формула / Реферат:
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.2. Система за п. 1, яка відрізняється тим, що містить дві...
Навігаційна система з охоронними функціями для мобільного об’єкта
Номер патенту: 41818
Опубліковано: 17.09.2001
Автори: Барладін Олександр Володимирович, Барладін Петро Олександрович
МПК: G09B 29/10
Мітки: мобільного, функціями, об'єкта, система, охоронними, навігаційна
Формула / Реферат:
1. Навігаційна система з охоронними функціями для мобільного об'єкта, що містить з'єднані між собою модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль прийому-передачі радіосигналу, яка відрізняється тим, що обладнана додатково автономним джерелом живлення і модулем стану, з'єднаним із модулем визначення координат, модуль управління обладнаний контролером для мобільного телефону, при цьому блок управління,...
Комплексна навігаційна система
Номер патенту: 42148
Опубліковано: 15.10.2001
Автор: Бакулін Ігор Євгенович
МПК: G01C 23/00
Мітки: система, комплексна, навігаційна
Формула / Реферат:
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Колесников Геннадій Викторович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: система, космічного, швидкостей, демпфірування, апарата, літального, кутових
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Снагіцький Сергій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутових, космічного, апарата, літального, вісесиметричного, демпфірування, швидкостей, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Попередній патент: Блок відмовостійких давачів для каналу тангажа
Наступний патент: Пристрій для автоматичного тримування
Випадковий патент: Спосіб повірки лічильників газу і пристрій для його здійснення