Система керування літаком
Номер патенту: 37288
Опубліковано: 25.11.2008
Автори: Дибська Ирина Юріївна, Ільченко Олексій Владиславович, Бандура Іван Миколайович

Формула / Реферат
Система керування літаком, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, сервопривід, паралельно підключений до золотникової тяги і електрично зв'язаний з датчиком кута, вмонтованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, датчик кутової швидкості, датчик кутового прискорення важеля керування, виходи яких підключені до блока керування, яка відрізняється тим, що до неї введена система компенсації впливу нелінійності, яка містить послідовно з'єднані формувач задавального впливу, перший, другий суматори, лінійну динамічну і нелінійну частини виконавчого пристрою, формувач вихідного сигналу, від'ємний зворотний зв'язок, підключений до другого входу першого суматора, спостерігач стану по керуванню, вхід якого підключений до виходу другого суматора, а вихід через перші входи третього і четвертого суматорів з'єднаний з входом ітераційно-інверсного фільтра, вихід якого підключений до другого входу другого суматора, вихідний сигнал з'єднаний через спостерігач стану вихідного параметра з другим входом третього суматора і безпосередньо з другим входом четвертого суматора.
Текст
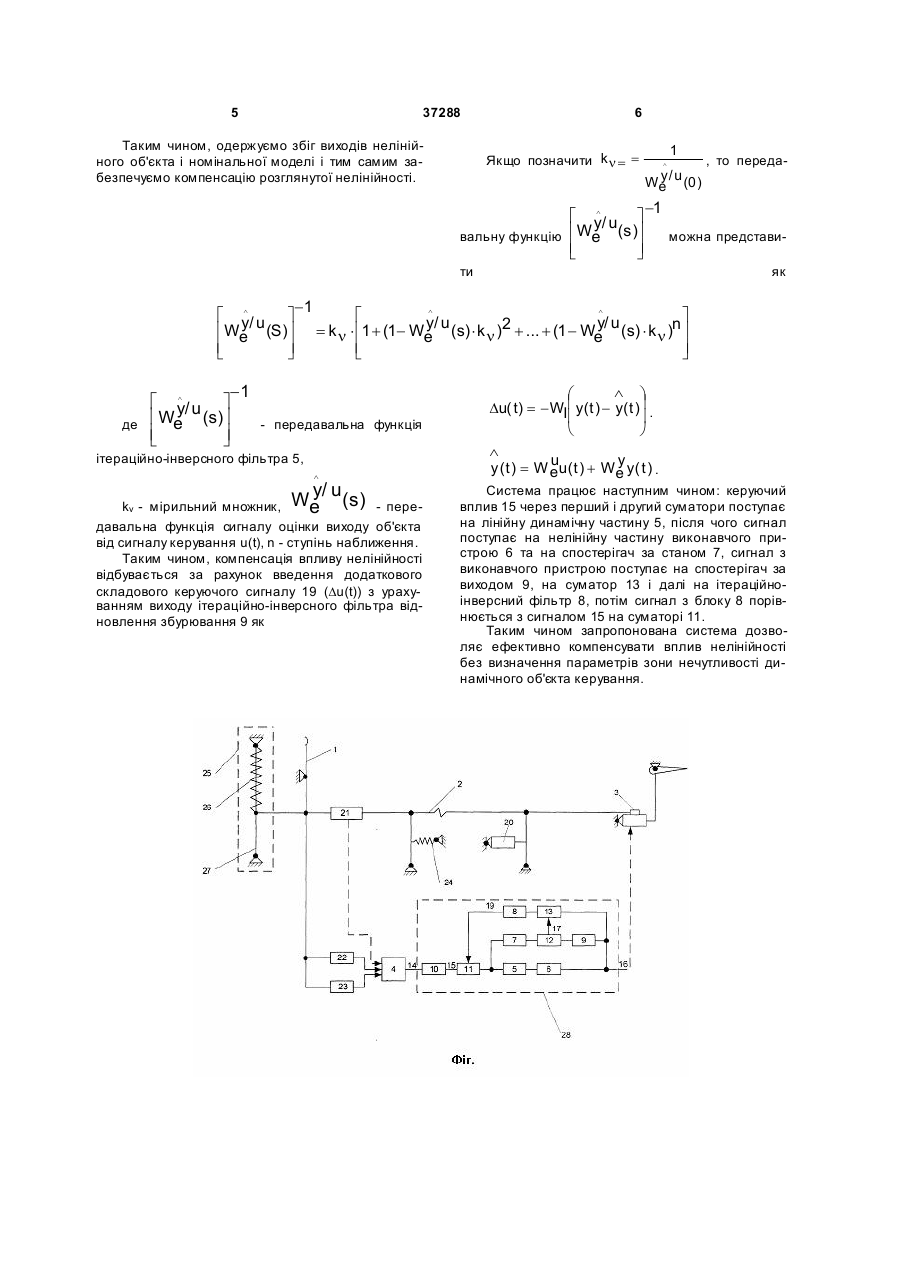
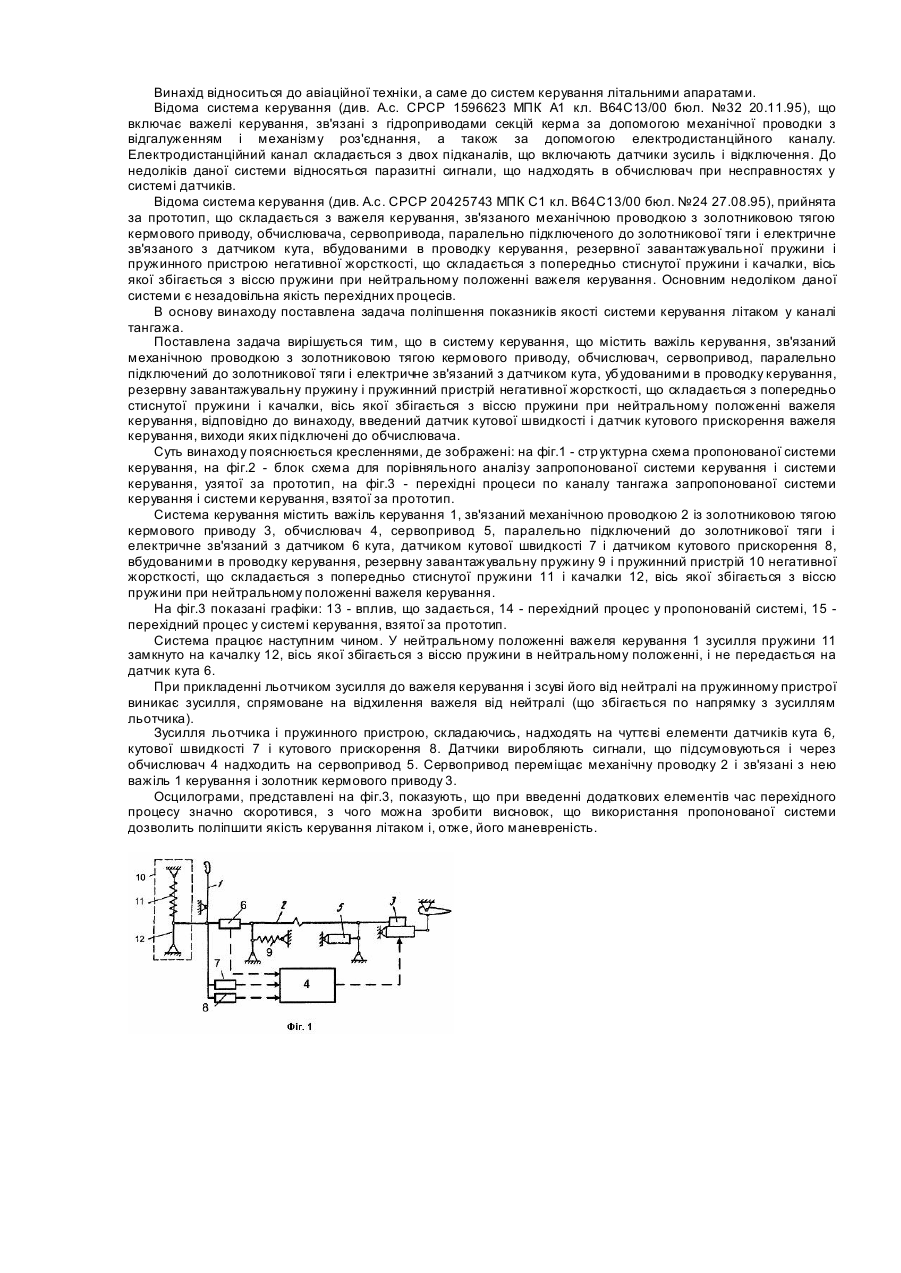
Система керування літаком, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, сервопривід, паралельно підключений до золотникової тяги і електрично зв'язаний з датчиком кута, вмонтованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, датчик кутової швидкості, 3 37288 На схемі позначені: важіль керування 1, зв'язаний механічною проводкою 2 із золотниковою тягою кермового приводу 3, блок керування 4, сервопривід 20, паралельно підключений до золотникової тяги і електричне зв'язаний з датчиком кута 21, датчиком кутової швидкості 22 і датчиком кутового прискорення 23, резервну завантажувальну пружину 24 і пружинний пристрій 25 негативної жорсткості, що складається з попередньо стиснутої пружини 26 і качалки 27, нелінійна статична частина 5 (N(u(t))), лінійна динамічна частина виконавчого пристрою 6 з передавальною функцією W0(s), спостерігач стану по керуванню 7 з передаu вальною функцією We (s) , ітераційно-інверсний фільтр 8 з передавальною функцією WI(s), спостерігач стану вихідного параметра об'єкта керування y 9 з передавальною функцією We ( s) , перший 10, другий 11, третій 12, четвертий 13 суматори, задаючий вплив 14 (g), сигнал керування 15 (u), вихідний сигнал 16 (у), сигнал оцінки виходу об'єкта 17 (y(t)), сигнал помилки вихідного сигналу 18 (Dy), сигнал оцінки збурювання 19(n). Система компенсації впливу нелінійності реалізується таким чином. Формується сигнал додаткового компенсаційного керування 19 (Du(t)) з урахуванням виходу ітераційно-інверсного фільтра відновлення збурювання 9 як 4 æ Ù ö Du( t ) = - WI ç y( t ) - y ( t ) ÷ ç ÷ è ø де WI(s) - передавальна функція ітераційноінверсного фільтру 9, у - ви хідний сигнал 16, y ( t ) ˆ - оцінка виходу об'єкта 17, отримана на основі спостерігача стану 7 і 8 виду Ù y u y (t ) = Weu(t ) + We y( t ) , у якому позначені u We (s) = C(sI - A - LC)-1Bu + Du , y We ( s ) = C( sI - A - LC ) -1L , де А - матриця стану об'єкта керування, В матриця керування, С - матриця виміру, D - матриця обходу, L - поліном спостерігача, І - одинична матриця, u We (s) - передавальна функція спостерігача стану по керуванню 3, y We ( s) - передавальна функція спостерігача стану вихідного параметра об'єкта керування 4. Сигнал компенсаційного керування 19 у замкнутій системі визначається з наступного операторного рівняння u u u u = WI (I - We )[ WeN(uн(t ) + Du( t ))] - WIWe uн( t ) (I - WI We )Du( t ) де u We - передавальна функція спостерігача y стану по керуванню 3, We - передавальна функція спостерігача стану ви хідного параметра об'єкта керування 8, I - одинична матриця, Du(t) - сигнал додаткового компенсаційного керування 15, N(uн(f)+Du(t)) - нелінійна статична частина 5 з врахуванням додаткового компенсаційного керування, uн(t) - сигнал номінального керування. é uù Якщо прийняти WI = ê We ú ë û -1 , що можливо рівняння спрощується до взаємозв'язку статичних характеристик. N(uн(t)+Du(t))-Kнuн(t)=0, де Кн - коефіцієнт пропорційності, що описує номінальну нелінійність об'єкта керування. Представимо нелінійність об'єкта в наступному вигляді: ìK(u( t ) - Du dz ( t )), u(t ) > 0 N(u(t )) = í , îK(u( t ) - Du dz ( t )), u(t ) 0 ï e н dz e н í u u ï We ( uн ( t) + Du( t)) - Dudz ( t )) - We uн ( t ) = 0, u( t) 0 í îDu( t ) = Dudz ( t ), u( t ) 0 ï dz dz y( t) = í e н u ( u ( t ) + Du ( t ) - Du ( t )), u( t ) < 0 ï î We н dz dz , u т.ч. y(t ) = Weuн( t) 5 37288 Таким чином, одержуємо збіг виходів нелінійного об'єкта і номінальної моделі і тим самим забезпечуємо компенсацію розглянутої нелінійності. 6 Якщо позначити k n = = Ù é y/ u ù вальну функцію ê We (s )ú ê ú ë û 1 Ù y We / u (0 ) , то переда -1 можна представи ти як -1 Ù Ù Ù é y/ u ù é y/ u (s) × k )2 + ... + (1 - W y/ u (s) × k )n ù = k n × ê1 + (1- We ê We (S )ú n n ú e ê ú ê ú ë û ë û де Ù é y/ u ù ê We (s)ú ê ú ë û -1 - передавальна функція ітераційно-інверсного фільтра 5, Ù y/ u We (s) kv - мірильний множник, - передавальна функція сигналу оцінки виходу об'єкта від сигналу керування u(t), n - ступінь наближення. Таким чином, компенсація впливу нелінійності відбувається за рахунок введення додаткового складового керуючого сигналу 19 (Du(t)) з урахуванням виходу ітераційно-інверсного фільтра відновлення збурювання 9 як Ù ö æ Du( t) = - WIç y( t ) - y( t ) ÷ . ç ÷ è ø Ù u y y (t ) = W eu(t ) + We y( t ) . Система працює наступним чином: керуючий вплив 15 черезперший і другий суматори поступає на лінійну динамічну частину 5, після чого сигнал поступає на нелінійну частину виконавчого пристрою 6 та на спостерігач за станом 7, сигнал з виконавчого пристрою поступає на спостерігач за виходом 9, на суматор 13 і далі на ітераційноінверсний фільтр 8, потім сигнал з блоку 8 порівнюється з сигналом 15 на суматорі 11. Таким чином запропонована система дозволяє ефективно компенсувати вплив нелінійності без визначення параметрів зони нечутливості динамічного об'єкта керування. 7 Комп’ютерна в ерстка C.Литв иненко 37288 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of aircraft
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych, Ilchenko Oleksii Vladyslavovych
Назва патенту російськоюСистема управления самолетом
Автори російськоюДибская Ирина Юрьевна, Бандура Иван Николаевич, Ильченко Алексей Владиславович
МПК / Мітки
МПК: B64C 13/00
Мітки: керування, літаком, система
Код посилання
<a href="https://ua.patents.su/4-37288-sistema-keruvannya-litakom.html" target="_blank" rel="follow" title="База патентів України">Система керування літаком</a>
Система компенсації впливу нелінійності
Номер патенту: 25479
Опубліковано: 10.08.2007
Автори: Козлова Олена Миколаївна, Бандура Іван Миколайович, Зимовін Анатолій Якович, Дибська Ирина Юріївна
МПК: H03H 21/00
Мітки: впливу, нелінійності, компенсації, система
Формула / Реферат:
Система компенсації впливу нелінійності, яка містить послідовно з'єднані формувач задавального впливу, перший, другий суматори, лінійну динамічну і нелінійну статичну частини виконавчого пристрою, формувач вихідного сигналу, від'ємний зворотний зв'язок, підключений до другого входу першого суматора, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вхід якого підключений до виходу другого суматора, а вихід через перші...
Система керування літаком
Номер патенту: 63672
Опубліковано: 15.01.2004
Автори: Бандура Іван Миколайович, Западня Артем Валентинович, Теницька Яна Миколаївна, Симонов Володимир Федорович
МПК: B64C 13/00
Мітки: літаком, система, керування
Формула / Реферат:
Система керування літаком, що складається з важеля керування, зв'язаного механічною проводкою з золотниковою тягою кермового приводу, обчислювача, сервоприводу, паралельно підключеного до золотникової тяги і електрично зв'язаного з датчиком кута, вмонтованими в проводку керування, резервної завантажувальної пружини і пружинного пристрою негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з...
Слідкуюча система з динамічним компенсатором збурень
Номер патенту: 36874
Опубліковано: 10.11.2008
Автори: Дибська Ирина Юріївна, Лугових Наталя Ігорівна, Бандура Іван Миколайович
МПК: B23C 1/00
Мітки: компенсатором, слідкуюча, динамічним, збурень, система
Формула / Реферат:
Слідкуюча система з динамічним компенсатором збурень, що містить регулятор, який послідовно з'єднаний з підсилювачем потужності, об'єктом керування, редуктором, вихід об'єкта керування також підключений до входу тахогенератора, вихід якого підключений до входу другого суматора, а вихід редуктора підключений до входу потенціометра, вихід якого підключений до входу першого суматора, яка відрізняється тим, що в неї введені система спостереження...
Установка поверхонь керування літаком з крилом великого звуження
Номер патенту: 49190
Опубліковано: 16.09.2002
Автор: Моргун Олександр Павлович
МПК: B64C 9/00
Мітки: установка, великого, крилом, літаком, звуження, поверхонь, керування
Формула / Реферат:
Установка поверхонь керування літаком з крилом великого звуження, утворена закрилками на крилі, хвостовим стабілізатором, установленим між кілями на хвостових балках, з рулями напрямку на кілях, яка відрізняється тим, що крило літака виконано зі збільшеними стрілоподібністю і кореневою хордою, хвостові балки включені до силового набору крила; хвостовий стабілізатор несиметричного перевернутого профілю установлений над задньою кромкою крила з...
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Дрючин Віктор Гаврилович, Ткачук Денис Ярославович, Жиляков Віктор Іванович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Попередній патент: Пристрій для подачі технологічного мастила
Наступний патент: Канатна установка
Випадковий патент: Магніторідинний герметизатор