Система компенсації впливу нелінійності
Номер патенту: 25479
Опубліковано: 10.08.2007
Автори: Козлова Олена Миколаївна, Дибська Ирина Юріївна, Зимовін Анатолій Якович, Бандура Іван Миколайович

Формула / Реферат
Система компенсації впливу нелінійності, яка містить послідовно з'єднані формувач задавального впливу, перший, другий суматори, лінійну динамічну і нелінійну статичну частини виконавчого пристрою, формувач вихідного сигналу, від'ємний зворотний зв'язок, підключений до другого входу першого суматора, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вхід якого підключений до виходу другого суматора, а вихід через перші входи третього і четвертого суматорів з'єднаний з входом ітераційно-інверсного фільтра, вихід якого підключений до другого входу другого суматора, вихідний сигнал з'єднаний через спостерігач стану вихідного параметра з другим входом третього суматора і безпосередньо - з другим входом четвертого суматора.
Текст
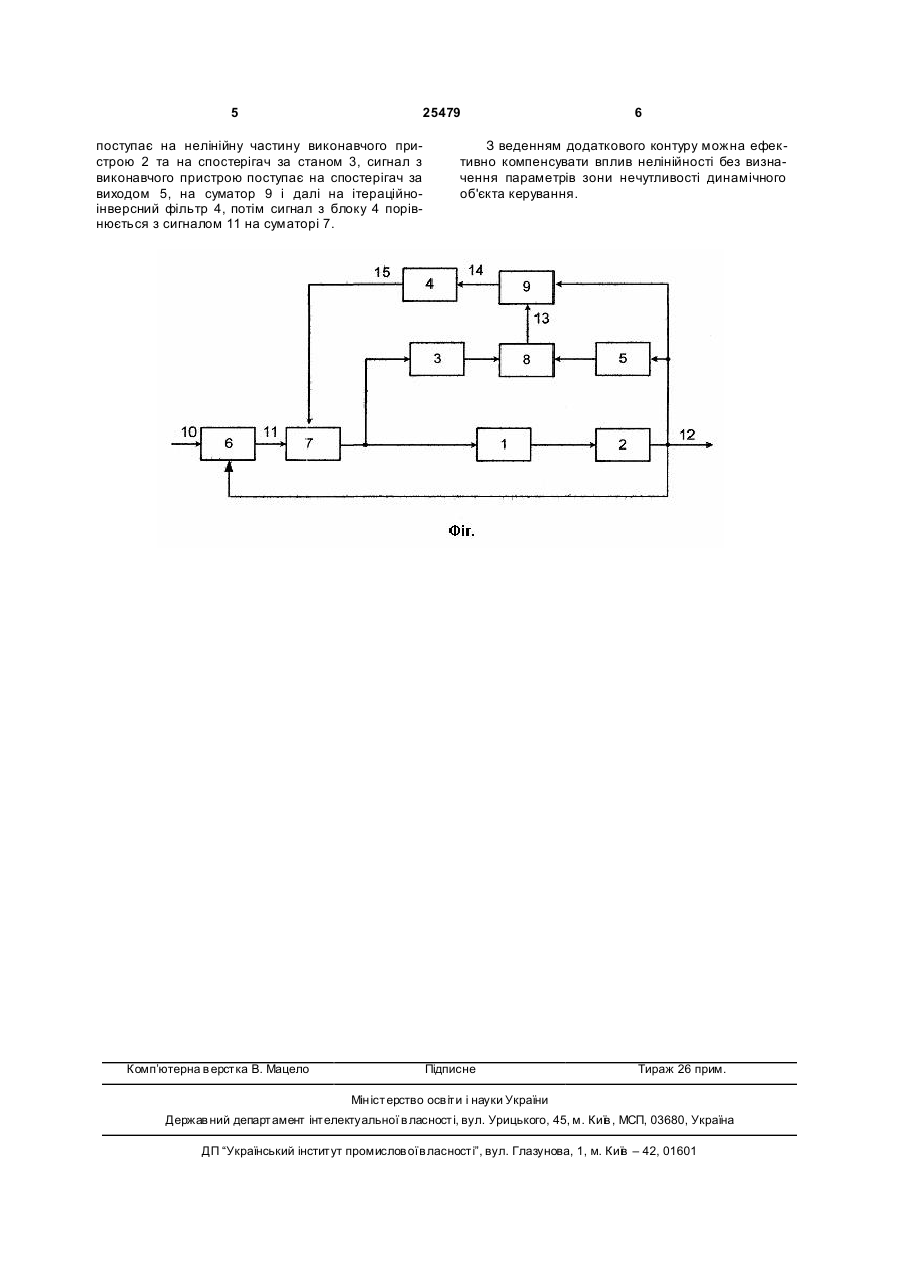
Система компенсації впливу нелінійності, яка містить послідовно з'єднані формувач задавального впливу, перший, другий суматори, лінійну дина 3 25479 Принцип дії запропонованої системи пояснюється блок-схемою адаптації, показаної на Фіг. Система компенсації впливу нелінійності містить: нелінійну статичну частину 1 (N(u(t))) , лінійну динамічну частину виконавчого пристрою 2 з передавальною функцією W0(s), спостерігач стану по u керуванню 3 з передавальною функцією We (s) , ітераційно-інверсний фільтр 4 з передавальною функцією WI(s), спостерігач стану ви хідного параметра об'єкта керування 5 з передавальною функy цією We ( s) , перший 6, другий 7, третій 8, четвертий 9 суматори, задаючий вплив 10 (g), сигнал керування 11 (u), вихідний сигнал 12 (у), сигнал оцінки виходу об'єкта 13 (y(t)), сигнал помилки вихідного сигналу 14 (Dу), сигнал оцінки збурювання 15(n). Система компенсації впливу нелінійності реалізується таким чином. Формується сигнал додаткового компенсаційного керування 15 (Du(t)) з урахуванням виходу ітераційно-інверсного фільтра відновлення збурювання 5 як ˆ Du( t ) = - WI (y(t ) - y(t )), де WI(s) - передавальна функція ітераційноˆ інверсного фільтра 5, у - вихідний сигнал 12, y(t) оцінка виходу об'єкта 13, отримана на основі спостерігача стану 3 і 4 виду u y ˆ y(t) = Weu( t ) + We y(t ) , у якому позначені u We ( s) = C (sI - A - LC )- 1Bu + Du, y We ( s ) = C( sI - A - LC) -1L, де А - матриця стану об'єкта керування, В - матриця керування, С - матриця виміру, D - матриця обходу, L - поліном спостерігача, І - одинична матриця, u We (s) - передавальна функція спостерігача стану по керуванню 3, y W e ( s) - передавальна функція спостерігача стану вихідного параметра об'єкта керування 4. Сигнал компенсаційного керування 15 у замкнутій системі визначається з наступного операторного рівняння, отриманого у відповідності зі структурною схемою двоконтурного керування (див. Фіг.1) u u u u (I - WIWe )Du( t) = WI(I - We )[ We N( uн (t ) + Du( t))] - WIWe uн (t) , u де W e - передавальна функція спостерігача y стану по керуванню 3, W e - Передавальна функція спостерігача стану ви хідного параметра об'єкта керування 4, І - одинична матриця, Du(t) - сигнал додаткового компенсаційного керування 15, N(uн(t) +Du(t)) - нелінійна статична частина 1 з врахуванням додаткового компенсаційного керування, uн(t) - сигнал номінального керування. 4 -1 u Якщо прийняти WI = éWe ù , що можливо при ê ú ë û виконанні умов інверсії оператора або оборотності системи по входу, то представлене вище рівняння спрощується до взаємозв'язку статични х характеристик N(uн(t)+Du(t))-Kнuн(t)=0 де Кн - коефіцієнт пропорційності, що описує номінальну нелінійність об'єкта керування. Представимо нелінійність об'єкта в наступному вигляді: ìK(u( t) - D udz ( t )),u( t ) > 0 N( u( t )) = í îK(u( t) + Dudz ( t )),u( t) 0 ï e н dz e н í u u ïWe (uн ( t) + Du( t) + Du dz( t)) - We uн (t ) = 0,u( t) 0 , í îDu( t ) = - D udz ( t ), u( t ) 0 ï dz dz y ( t) = í e н u(u ( t) - Du ( t ) + Du ( t )),u( t ) < 0 ï We н î dz dz u т.ч. y(t ) = W e uн (t) . Таким чином, одержуємо збіг виходів нелінійного об'єкта і номінальної моделі і тим самим забезпечуємо компенсацію розглянутої нелінійності, 1 Якщо позначити k v = , то передаваˆ y / u(0) We -1 ˆ y льну функцію é We / u ( s)ù можна представити як ê ú ë û ˆ é y /u ù êWe ( s) ú ë û -1 ˆ ˆ ˆ é y /u y /u 2 y/ u nù = k v × ê1 + (1- We ( s) × k v ) + (1 - We (s ) × k v ) + ... + (1 - We (s ) × k v ) ú, ë û -1 ˆ y де éWe / u(s )ù - передавальна функція ітераційê ú ë û но-інверсного фільтра 5, kv - мірильний множник, ˆ y We / u (s) - передавальна функція сигналу оціˆ нки виходу об'єкта y від сигналу керування u(t), n - ступінь наближення. Таким чином, компенсація впливу нелінійності відбувається за рахунок введення додаткового складового керуючого сигналу 15 (Du(t) ) з урахуванням виходу ітераційно-інверсного фільтра відновлення збурювання 5 як ˆ Du( t ) = - WI (y(t ) - y( t )) . u u ˆ y(t ) = W e u( t ) + W e y(t ) . Система працює наступним чином: керуючий вплив 10 через перший і другий суматори поступає на лінійну динамічну частину 1, після чого сигнал 5 25479 поступає на нелінійну частину виконавчого пристрою 2 та на спостерігач за станом 3, сигнал з виконавчого пристрою поступає на спостерігач за виходом 5, на суматор 9 і далі на ітераційноінверсний фільтр 4, потім сигнал з блоку 4 порівнюється з сигналом 11 на суматорі 7. Комп’ютерна в ерстка В. Мацело 6 З веденням додаткового контуру можна ефективно компенсувати вплив нелінійності без визначення параметрів зони нечутливості динамічного об'єкта керування. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNonlinearity compensation system
Автори англійськоюBandura Ivan Mykolaiovych, Zymovin Ivan Mykhailovych
Назва патенту російськоюСистема компенсации влияния нелинейности
Автори російськоюБандура Иван Николаевич, Зимовин Анатолий Яковлевич
МПК / Мітки
МПК: H03H 21/00
Мітки: компенсації, нелінійності, система, впливу
Код посилання
<a href="https://ua.patents.su/3-25479-sistema-kompensaci-vplivu-nelinijjnosti.html" target="_blank" rel="follow" title="База патентів України">Система компенсації впливу нелінійності</a>
Спосіб компенсації нелінійності інерційного елемента типу “зона нечутливості”
Номер патенту: 4558
Опубліковано: 17.01.2005
Автори: Любинський Петро Леонідович, Дибська Ірина Юр'ївна, Ністратов Олександр Олександрович, Кулік Анатолій Степанович
МПК: H03H 21/00
Мітки: елемента, зона, нечутливості, інерційного, спосіб, компенсації, типу, нелінійності
Формула / Реферат:
Спосіб компенсації нелінійності інерційного елемента типу «зона нечутливості», що полягає у формуванні задавального впливу, формуванні керуючого впливу об'єктом, що має лінійну і нелінійну складові, формуванні зворотного зв'язку, який відрізняється тим, що додатково формують зворотний зв'язок оцінки збудження, для чого одержують сигнал помилки вихідного сигналу і на його основі за допомогою розкладання в ряд Неймона отримують сигнал оцінки...
Керований виконавчий пристрій
Номер патенту: 17846
Опубліковано: 16.10.2006
Автори: Дибська Ирина Юріївна, Бандура Іван Миколайович, Кортунов Вячеслав Іванович, Шапіна Наталя Володимирівна
МПК: G05B 15/02
Мітки: керований, пристрій, виконавчий
Формула / Реферат:
Керований виконавчий пристрій, що містить послідовно з'єднані регулятор і об'єкт керування, вихід якого через третій суматор з'єднаний з входом регулятора спостерігача за станом, спостерігач за виходом й ітераційно-інверсний фільтр, вхід спостерігача за виходом з'єднаний з виходом об'єкта керування, спостерігач за станом і спостерігач за виходом з'єднані між собою четвертим суматором, вихід цих спостерігачів через п'ятий суматор разом з...
Спосіб компенсації впливу випромінювання стороннього джерела на результати виміру яскравості оптичного поля об’єкта у твердій і рідкій фазах
Номер патенту: 38844
Опубліковано: 15.05.2001
Автори: Порєв Володимир Андрійович, Порєв Геннадій Володимирович
Мітки: твердий, джерела, впливу, виміру, яскравості, випромінювання, оптичного, об'єкта, стороннього, результаті, поля, спосіб, компенсації, рідкий, фазах
Формула / Реферат:
(21) 2000116167 Дата прийняття(54)(57) рішення 19 лютого 2001 р.Спосіб компенсації впливу випромінювання стороннього джерела на результати виміру яскравості оптичного поля об'єкта у твердій і рідкій...
Спосіб компенсації струмів впливу при вимірюванні тангенса кута діелектричних втрат
Номер патенту: 46081
Опубліковано: 15.05.2002
Автор: Шинкаренко Гліб Васильович
МПК: G01R 31/00, G01R 31/34
Мітки: впливу, компенсації, вимірюванні, тангенса, струмів, кута, спосіб, втрат, діелектричних
Формула / Реферат:
1. Спосіб компенсації струмів впливу при вимірюванні тангенса кута діелектричних втрат, наприклад за допомогою мосту Шерінга, який містить два регулюючих плеча, до одного з котрих під'єднане коло з ізоляцією електричної установки, що перевіряється, а до іншого - еталонний конденсатор, при якому міст підключають до джерела випробувальної напруги і роблять вимірювання, який відрізняється тим, що перед вимірюванням відключають джерело...
Пристрій для компенсації впливу температури вільних кінців термоелектричного перетворювача
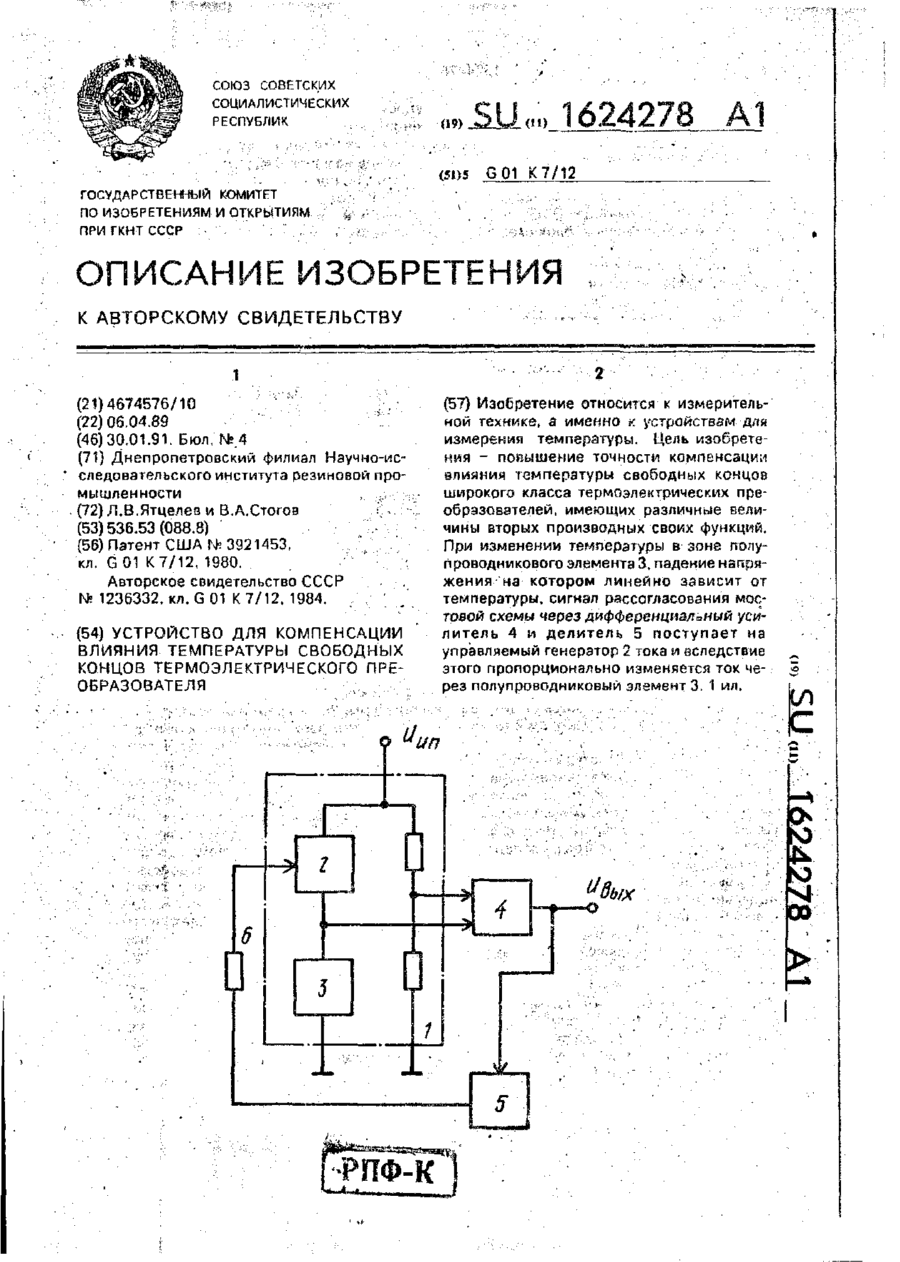
Номер патенту: 1676
Опубліковано: 25.10.1994
Автори: Стогов Володимир Олександрович, Ятцелєв Леонід Вікторович
МПК: G01K 7/12
Мітки: пристрій, температури, перетворювача, впливу, вільних, термоелектричного, компенсації, кінців
Формула / Реферат:
Устройство для компенсации влияния температуры свободных концов термоэлектрического преобразователя, содержащее электрическую мостовую схему с датчиком температуры, дифференциальный усилитель, вход которого подключен к выходу электрической мостовой схемы, регулируемый делитель напряжения, выход которого подключен к одному из выводов корректирующего резистора, отличающееся тем, что, с целью повышения точности компенсации влияния...
Попередній патент: Дообрізувач гички
Наступний патент: Люк для закривання оголовка колодязя
Випадковий патент: Пристрій для вимірювання товщини шкіри з ноніусом