Транспортні ваги
Номер патенту: 37748
Опубліковано: 10.12.2008
Автори: Міцкевич Ігор Анатолійович, Ходаковський Володимир Іванович
Формула / Реферат
1. Транспортні ваги, які складаються з двох послідовно розташованих платформ, що містять раму, що складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечними щаблинами, при цьому одна з платформ містить чотири опорні вузли, встановлені на її кінцях, друга - два на кінці, а суміжні краї платформ з'єднані за допомогою двосторонніх роз'ємних шарнірів, причому опорні вузли встановлені із зовнішнього краю балок і містять опорний елемент, з'єднаний з вертикальною колоною, і кронштейн, приєднаний вертикально до зовнішньої поверхні ребер балок, а між торцем вертикальної колони і кронштейном розміщений динамометричний датчик, які відрізняються тим, що опорний елемент, з'єднаний з вертикальною колоною, являє собою окремо вмонтовану опору, яка нижньою частиною фіксуються нерухомо відносно платформи на підставі, причому верхня частина вертикальної колони має в перерізі коробчату форму, на її торці встановлена вертикально регульована опора, а вертикальний кронштейн в перерізі має відповідну колоні еквідистантну форму, зверху обмежений горизонтальною полицею з ребром жорсткості і забезпечений упорними регульованими гвинтами, що фіксують колону в трьох точках горизонтальної площини, динамометричний датчик розміщений в жорсткому вузлі вмонтування, нижньою частиною, що фіксується на регульованій опорі колони, а верхня частина вузла вмонтування містить проставочний циліндровий штовхач, встановлений співвісно штоку динамометричного датчика, що має можливість контакту зі штоком і горизонтальною полицею кронштейна.
2. Ваги за п. 1, які відрізняються тим, що вузол вмонтування складається з верхньої і нижньої циліндрової плити, сполучених дистанційними втулками за допомогою гвинтів, до плит приєднані відповідні їм циліндрові проставки, між якими має можливість орієнтовано розміщуватися тензометричний датчик, причому верхня плита і верхня проставка виконані з отвором для штовхача, а нижня плита вузла вмонтування виконана з отворами для фіксації його на регульованій опорі колони.
Текст
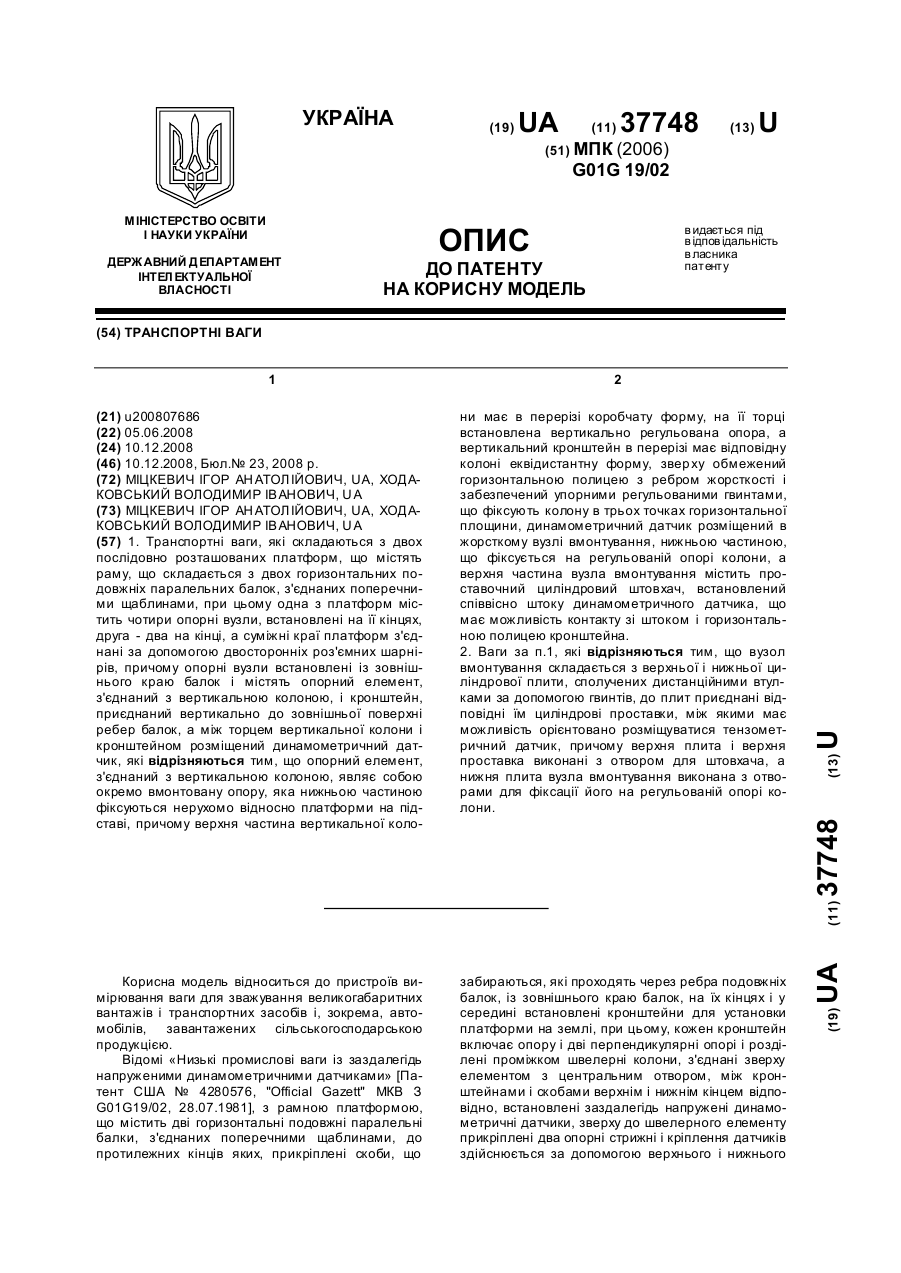
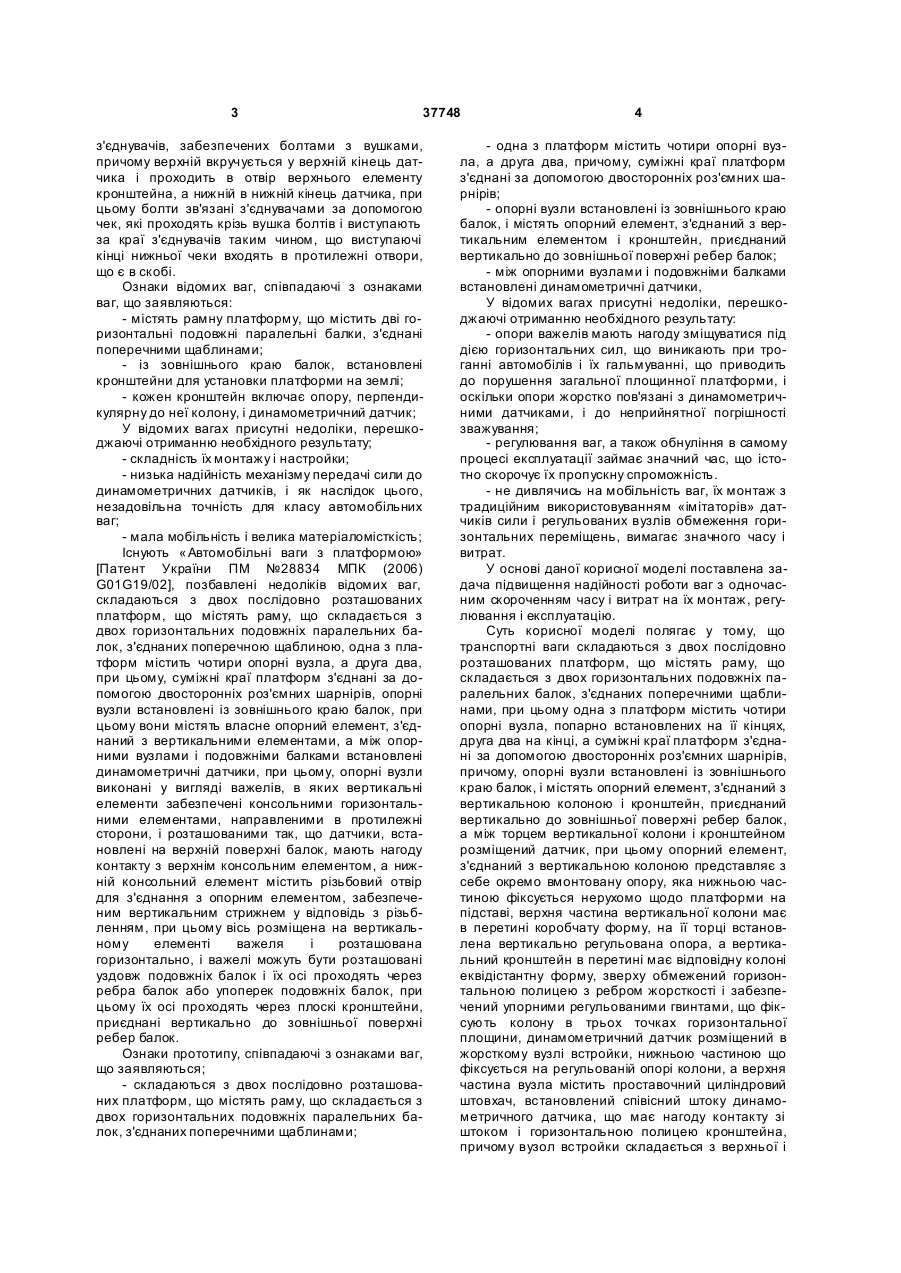
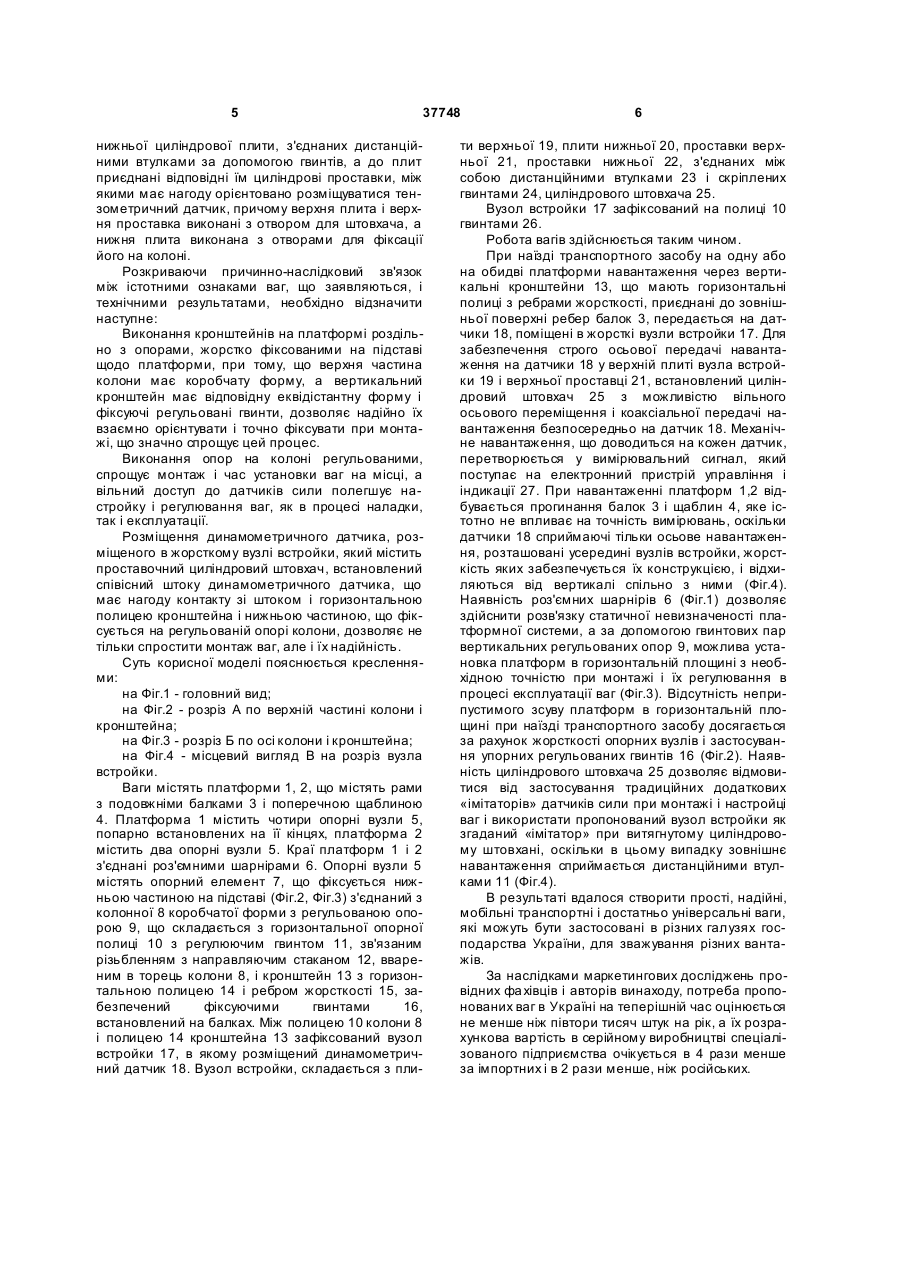
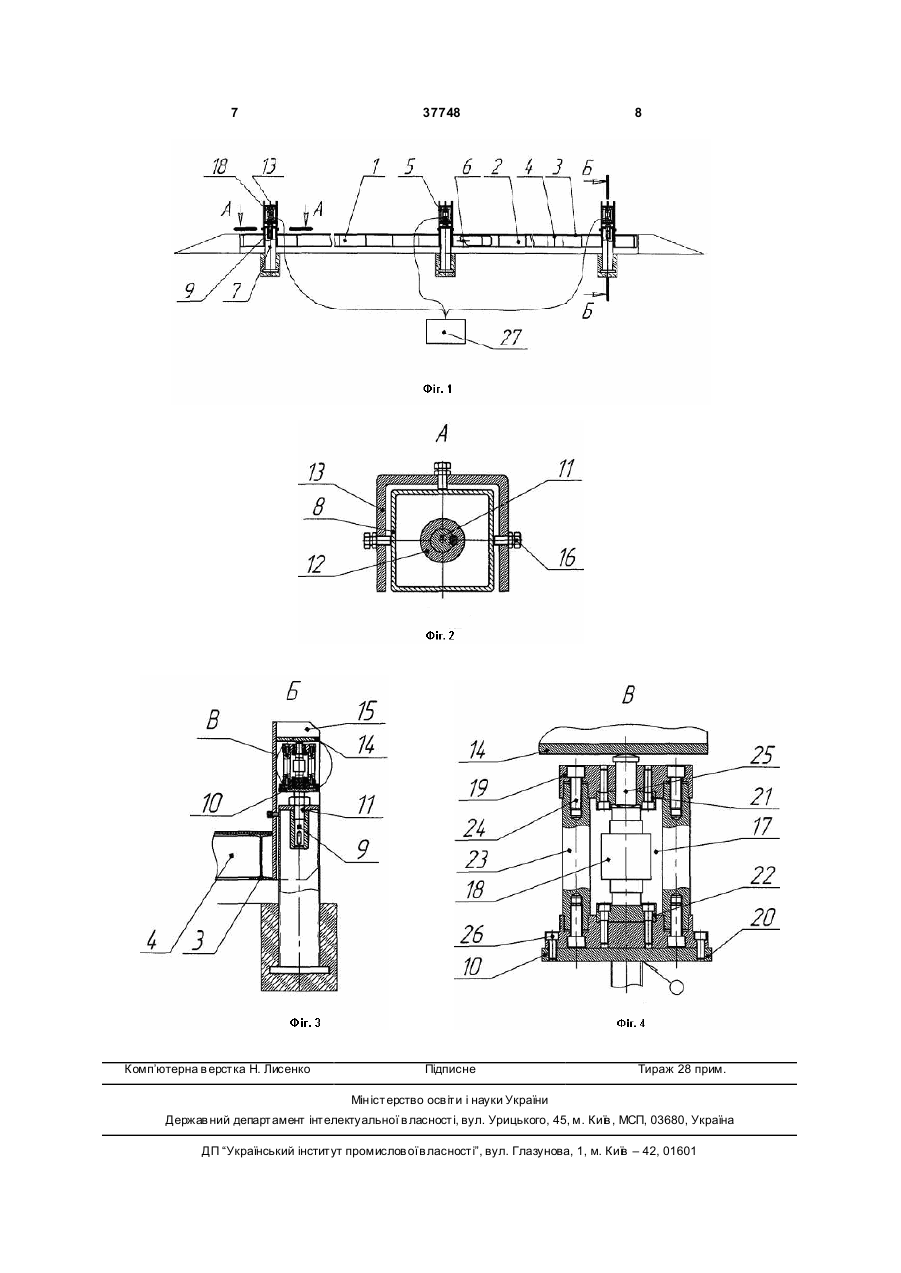
1. Транспортні ваги, які складаються з двох послідовно розташованих платформ, що містять раму, що складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечними щаблинами, при цьому одна з платформ містить чотири опорні вузли, встановлені на її кінцях, друга - два на кінці, а суміжні краї платформ з'єднані за допомогою двосторонніх роз'ємних шарнірів, причому опорні вузли встановлені із зовнішнього краю балок і містять опорний елемент, з'єднаний з вертикальною колоною, і кронштейн, приєднаний вертикально до зовнішньої поверхні ребер балок, а між торцем вертикальної колони і кронштейном розміщений динамометричний датчик, які відрізняються тим, що опорний елемент, з'єднаний з вертикальною колоною, являє собою окремо вмонтовану опору, яка нижньою частиною фіксуються нерухомо відносно платформи на підставі, причому верхня частина вертикальної коло U 2 (13) 1 3 37748 з'єднувачів, забезпечених болтами з вушками, причому верхній вкручується у верхній кінець датчика і проходить в отвір верхнього елементу кронштейна, а нижній в нижній кінець датчика, при цьому болти зв'язані з'єднувачами за допомогою чек, які проходять крізь вушка болтів і виступають за краї з'єднувачів таким чином, що виступаючі кінці нижньої чеки входять в протилежні отвори, що є в скобі. Ознаки відомих ваг, співпадаючі з ознаками ваг, що заявляються: - містять рамну платформу, що містить дві горизонтальні подовжні паралельні балки, з'єднані поперечними щаблинами; - із зовнішнього краю балок, встановлені кронштейни для установки платформи на землі; - кожен кронштейн включає опору, перпендикулярну до неї колону, і динамометричний датчик; У відомих вагах присутні недоліки, перешкоджаючі отриманню необхідного результату; - складність їх монтажу і настройки; - низька надійність механізму передачі сили до динамометричних датчиків, і як наслідок цього, незадовільна точність для класу автомобільних ваг; - мала мобільність і велика матеріаломісткість; Існують « Автомобільні ваги з платформою» [Патент України ПМ №28834 МПК (2006) G01G19/02], позбавлені недоліків відомих ваг, складаються з двох послідовно розташованих платформ, що містять раму, що складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечною щаблиною, одна з платформ містить чотири опорні вузла, а друга два, при цьому, суміжні краї платформ з'єднані за допомогою двосторонніх роз'ємних шарнірів, опорні вузли встановлені із зовнішнього краю балок, при цьому вони містять власне опорний елемент, з'єднаний з вертикальними елементами, а між опорними вузлами і подовжніми балками встановлені динамометричні датчики, при цьому, опорні вузли виконані у вигляді важелів, в яких вертикальні елементи забезпечені консольними горизонтальними елементами, направленими в протилежні сторони, і розташованими так, що датчики, встановлені на верхній поверхні балок, мають нагоду контакту з верхнім консольним елементом, а нижній консольний елемент містить різьбовий отвір для з'єднання з опорним елементом, забезпеченим вертикальним стрижнем у відповідь з різьбленням, при цьому вісь розміщена на вертикальному елементі важеля і розташована горизонтально, і важелі можуть бути розташовані уздовж подовжніх балок і їх осі проходять через ребра балок або упоперек подовжніх балок, при цьому їх осі проходять через плоскі кронштейни, приєднані вертикально до зовнішньої поверхні ребер балок. Ознаки прототипу, співпадаючі з ознаками ваг, що заявляються; - складаються з двох послідовно розташованих платформ, що містять раму, що складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечними щаблинами; 4 - одна з платформ містить чотири опорні вузла, а друга два, причому, суміжні краї платформ з'єднані за допомогою двосторонніх роз'ємних шарнірів; - опорні вузли встановлені із зовнішнього краю балок, і містять опорний елемент, з'єднаний з вертикальним елементом і кронштейн, приєднаний вертикально до зовнішньої поверхні ребер балок; - між опорними вузлами і подовжніми балками встановлені динамометричні датчики, У відомих вагах присутні недоліки, перешкоджаючі отриманню необхідного результату: - опори важелів мають нагоду зміщуватися під дією горизонтальних сил, що виникають при троганні автомобілів і їх гальмуванні, що приводить до порушення загальної площинної платформи, і оскільки опори жорстко пов'язані з динамометричними датчиками, і до неприйнятної погрішності зважування; - регулювання ваг, а також обнуління в самому процесі експлуатації займає значний час, що істотно скорочує їх пропускну спроможність. - не дивлячись на мобільність ваг, їх монтаж з традиційним використовуванням «імітаторів» датчиків сили і регульованих вузлів обмеження горизонтальних переміщень, вимагає значного часу і витрат. У основі даної корисної моделі поставлена задача підвищення надійності роботи ваг з одночасним скороченням часу і витрат на їх монтаж, регулювання і експлуатацію. Суть корисної моделі полягає у тому, що транспортні ваги складаються з двох послідовно розташованих платформ, що містять раму, що складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечними щаблинами, при цьому одна з платформ містить чотири опорні вузла, попарно встановлених на її кінцях, друга два на кінці, а суміжні краї платформ з'єднані за допомогою двосторонніх роз'ємних шарнірів, причому, опорні вузли встановлені із зовнішнього краю балок, і містять опорний елемент, з'єднаний з вертикальною колоною і кронштейн, приєднаний вертикально до зовнішньої поверхні ребер балок, а між торцем вертикальної колони і кронштейном розміщений датчик, при цьому опорний елемент, з'єднаний з вертикальною колоною представляє з себе окремо вмонтовану опору, яка нижньою частиною фіксується нерухомо щодо платформи на підставі, верхня частина вертикальної колони має в перетині коробчату форму, на її торці встановлена вертикально регульована опора, а вертикальний кронштейн в перетині має відповідну колоні еквідістантну форму, зверху обмежений горизонтальною полицею з ребром жорсткості і забезпечений упорними регульованими гвинтами, що фіксують колону в трьох точках горизонтальної площини, динамометричний датчик розміщений в жорсткому вузлі встройки, нижньою частиною що фіксується на регульованій опорі колони, а верхня частина вузла містить проставочний циліндровий штовхач, встановлений співісний штоку динамометричного датчика, що має нагоду контакту зі штоком і горизонтальною полицею кронштейна, причому вузол встройки складається з верхньої і 5 37748 нижньої циліндрової плити, з'єднаних дистанційними втулками за допомогою гвинтів, а до плит приєднані відповідні їм циліндрові проставки, між якими має нагоду орієнтовано розміщуватися тензометричний датчик, причому верхня плита і верхня проставка виконані з отвором для штовхача, а нижня плита виконана з отворами для фіксації його на колоні. Розкриваючи причинно-наслідковий зв'язок між істотними ознаками ваг, що заявляються, і технічними результатами, необхідно відзначити наступне: Виконання кронштейнів на платформі роздільно з опорами, жорстко фіксованими на підставі щодо платформи, при тому, що верхня частина колони має коробчату форму, а вертикальний кронштейн має відповідну еквідістантну форму і фіксуючі регульовані гвинти, дозволяє надійно їх взаємно орієнтувати і точно фіксувати при монтажі, що значно спрощує цей процес. Виконання опор на колоні регульованими, спрощує монтаж і час установки ваг на місці, а вільний доступ до датчиків сили полегшує настройку і регулювання ваг, як в процесі наладки, так і експлуатації. Розміщення динамометричного датчика, розміщеного в жорсткому вузлі встройки, який містить проставочний циліндровий штовхач, встановлений співісний штоку динамометричного датчика, що має нагоду контакту зі штоком і горизонтальною полицею кронштейна і нижньою частиною, що фіксується на регульованій опорі колони, дозволяє не тільки спростити монтаж ваг, але і їх надійність. Суть корисної моделі пояснюється кресленнями: на Фіг.1 - головний вид; на Фіг.2 - розріз А по верхній частині колони і кронштейна; на Фіг.3 - розріз Б по осі колони і кронштейна; на Фіг.4 - місцевий вигляд В на розріз вузла встройки. Ваги містять платформи 1, 2, що містять рами з подовжніми балками 3 і поперечною щаблиною 4. Платформа 1 містить чотири опорні вузли 5, попарно встановлених на її кінцях, платформа 2 містить два опорні вузли 5. Краї платформ 1 і 2 з'єднані роз'ємними шарнірами 6. Опорні вузли 5 містять опорний елемент 7, що фіксується нижньою частиною на підставі (Фіг.2, Фіг.3) з'єднаний з колонної 8 коробчатої форми з регульованою опорою 9, що складається з горизонтальної опорної полиці 10 з регулюючим гвинтом 11, зв'язаним різьбленням з направляючим стаканом 12, ввареним в торець колони 8, і кронштейн 13 з горизонтальною полицею 14 і ребром жорсткості 15, забезпечений фіксуючими гвинтами 16, встановлений на балках. Між полицею 10 колони 8 і полицею 14 кронштейна 13 зафіксований вузол встройки 17, в якому розміщений динамометричний датчик 18. Вузол встройки, складається з пли 6 ти верхньої 19, плити нижньої 20, проставки верхньої 21, проставки нижньої 22, з'єднаних між собою дистанційними втулками 23 і скріплених гвинтами 24, циліндрового штовхача 25. Вузол встройки 17 зафіксований на полиці 10 гвинтами 26. Робота вагів здійснюється таким чином. При наїзді транспортного засобу на одну або на обидві платформи навантаження через вертикальні кронштейни 13, що мають горизонтальні полиці з ребрами жорсткості, приєднані до зовнішньої поверхні ребер балок 3, передається на датчики 18, поміщені в жорсткі вузли встройки 17. Для забезпечення строго осьової передачі навантаження на датчики 18 у верхній плиті вузла встройки 19 і верхньої проставці 21, встановлений циліндровий штовхач 25 з можливістю вільного осьового переміщення і коаксіальної передачі навантаження безпосередньо на датчик 18. Механічне навантаження, що доводиться на кожен датчик, перетворюється у вимірювальний сигнал, який поступає на електронний пристрій управління і індикації 27. При навантаженні платформ 1,2 відбувається прогинання балок 3 і щаблин 4, яке істотно не впливає на точність вимірювань, оскільки датчики 18 сприймаючі тільки осьове навантаження, розташовані усередині вузлів встройки, жорсткість яких забезпечується їх конструкцією, і відхиляються від вертикалі спільно з ними (Фіг.4). Наявність роз'ємних шарнірів 6 (Фіг.1) дозволяє здійснити розв'язку статичної невизначеності платформної системи, а за допомогою гвинтових пар вертикальних регульованих опор 9, можлива установка платформ в горизонтальній площині з необхідною точністю при монтажі і їх регулювання в процесі експлуатації ваг (Фіг.3). Відсутність неприпустимого зсуву платформ в горизонтальній площині при наїзді транспортного засобу досягається за рахунок жорсткості опорних вузлів і застосування упорних регульованих гвинтів 16 (Фіг.2). Наявність циліндрового штовхача 25 дозволяє відмовитися від застосування традиційних додаткових «імітаторів» датчиків сили при монтажі і настройці ваг і використати пропонований вузол встройки як згаданий «імітатор» при витягнутому циліндровому штовхані, оскільки в цьому випадку зовнішнє навантаження сприймається дистанційними втулками 11 (Фіг.4). В результаті вдалося створити прості, надійні, мобільні транспортні і достатньо універсальні ваги, які можуть бути застосовані в різних галузях господарства України, для зважування різних вантажів. За наслідками маркетингових досліджень провідних фа хівців і авторів винаходу, потреба пропонованих ваг в Україні на теперішній час оцінюється не менше ніж півтори тисяч штук на рік, а їх розрахункова вартість в серійному виробництві спеціалізованого підприємства очікується в 4 рази менше за імпортних і в 2 рази менше, ніж російських. 7 Комп’ютерна в ерстка Н. Лисенко 37748 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTransport scales
Автори англійськоюMitskevych Ihor Anatoliiovych, Khodakovskyi Volodymyr Ivanovych
Назва патенту російськоюТранспортные весы
Автори російськоюМицкевич Игорь Анатольевич, Ходаковский Владимир Иванович
МПК / Мітки
МПК: G01G 19/02
Мітки: транспортні, ваги
Код посилання
<a href="https://ua.patents.su/4-37748-transportni-vagi.html" target="_blank" rel="follow" title="База патентів України">Транспортні ваги</a>
Автомобільні ваги з платформою
Номер патенту: 28834
Опубліковано: 25.12.2007
Автори: Міцкевич Ігор Анатолійович, Ходаковський Володимир Іванович
МПК: G01G 19/02
Мітки: автомобільні, ваги, платформою
Формула / Реферат:
1. Автомобільні ваги з платформою, що містять раму, яка складається з двох горизонтальних подовжніх паралельних балок, з'єднаних поперечними щаблинами, де із зовнішнього краю балок, на їх кінцях і усередині, попарно встановлені опорні вузли, що містять власне опорний елемент, з'єднаний з вертикальними елементами, і між опорними вузлами і подовжніми балками встановлені динамометричні датчики, які відрізняються тим, що платформа складається з...
Автомобільні ваги
Номер патенту: 29148
Опубліковано: 16.10.2000
Автори: Дмитрієв Едуард Модестович, Калінін Олександр Іванович
МПК: G01G 19/02
Мітки: ваги, автомобільні
Формула / Реферат:
1. Автомобільні ваги, які містять встановлені на силовимірювальні датчики вантажоприймальної платформи, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що вони забезпечені перехідним мостом, розташованим між вантажеприймальними платформами, на які він вільно опирається, при цьому вантажоприймальні платформи забезпечені жорстко закріпленими до них упорами, які встановлені паралельно подовжнім балкам перехідного моста з...
Ваги
Номер патенту: 42970
Опубліковано: 15.11.2001
Автори: Браз Давид Леонідович, Альтман Ілля Аронович
МПК: G01G 19/02
Мітки: ваги
Формула / Реферат:
1. Ваги, які містять опорну раму, вантажоприймальну платформу, тензодатчики, вузли передавання навантаження, струнки, вимірювальну апаратуру, які відрізняються тим, що тензометричні датчики встановлені на вантажоприймальній платформі, опорна рама виконана у вигляді окремих опорних плит з встановленими на них вузлами передавання навантаження, причому опорні плити наділені тягами, жорсткими у подовжньому напрямку та гнучкими у вертикальному...
Ваги платформні
Номер патенту: 67819
Опубліковано: 15.07.2004
Автори: Вільяверде Кано Відаль, Артюшенко Анатолій Дмитрович, Нестеренко Василь Іванович
МПК: G01G 19/02
Мітки: ваги, платформні
Формула / Реферат:
1. Ваги платформні, що містять вантажоприймальну платформу, силовимірювальні датчики по її кутах, які з'єднані анкерними болтами з основою та вимірювальною апаратурою, вузли поперечної і повздовжньої стабілізації, які відрізняються тим, що повздовжні балки вантажоприймальної платформи розташовані попарно з урахуванням даних статистики про колію, наприклад, автомобілів, а по осях платформи розташовані чотири вузли із ковзними парами, що її...
Конвеєрні ваги
Номер патенту: 13940
Опубліковано: 17.04.2006
Автори: Калінін Олександр Олександрович, Калінін Олександр Іванович
МПК: G01G 11/00
Формула / Реферат:
Конвеєрні ваги, що містять вагову ділянку з обмежуючими її роликоопорами стрічкового транспортера, розташованими під вантажною гілкою транспортерної стрічки, розміщеної на ваговій ділянці вантажоприймальну платформу з роликоопорами, що контактують із транспортерною стрічкою і яка спирається через вузли силовведення на силовимірювальні тензодатчики, датчик швидкості транспортерної стрічки, які відрізняються тим, що вантажоприймальна платформа...