Пристрій обробки радіолокаційної інформації
Номер патенту: 37867
Опубліковано: 15.05.2003
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, Мокеєв Юрій Генадійович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Падалко Віктор Григорович



Формула / Реферат
1. Пристрій обробки радіолокаційної інформації, який містить q доплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтрового каналу, лінію затримки з відводами, послідовно з’єднані схему порівняння і регістр затримки, порогову схему, вентильну схему, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою, який відрізняється тим, що він містить блок відбору мінімуму з q входами, помножувач, вхід якого з'єднаний з виходом блока відбору мінімуму, входи q-входової схеми АБО підключені до виходів доплерівських каналів, вхід бінарного накопичувача з'єднаний з виходом q-входової схеми АБО, вихід доплерівського фільтра з'єднаний зі входом амплітудного бінарного квантувача, з першим входом схеми порівняння і відповідним входом блока відбору мінімуму, перший вхід вентильної схеми підключений до виходу амплітудного бінарного квантувача, а другий її вхід з'єднаний з виходом регістра затримки, другі входи схем порівняння всіх доплерівських каналів об'єднані між собою і підключені до виходу помножувача.
2. Пристрій за п. 1, який відрізняється тим, що кожен доплерівський канал містить блок визначення рівня шуму, вхід якого та вхід лінії затримки об'єднані та підключені до виходу доплерівського фільтра, перший вхід порогової схеми з'єднаний з виходом блока визначення рівня шуму, а другий вхід з'єднаний з виходом лінії затримки, та додаткову вентильну схему, перший вхід якої підключений до виходу вентильної схеми, другий вхід з'єднаний з виходом порогової схеми, а вихід є виходом доплерівського каналу.
Текст
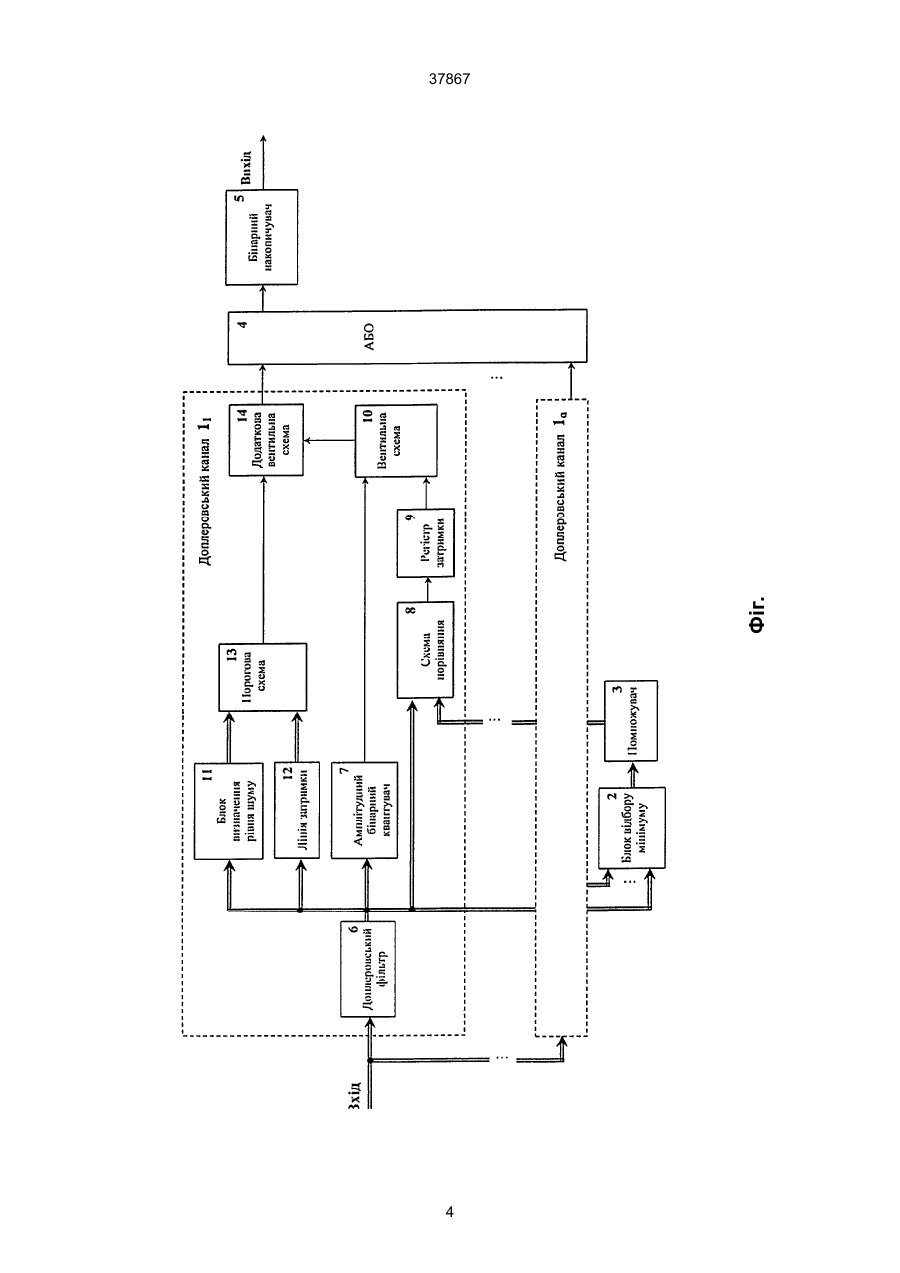
1. Пристрій обробки радіолокаційної інформації, який містить q допплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає допплерівський фільтр, вхід якого є входом допплерівського фільтрового каналу, лінію затримки з відводами, пристрій усереднення, схему порівняння, порогову схему, регістр затримки та вентильну схему, вихід якої є виходом допплерівського фільтрового каналу, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою, який відрізняється тим, що він містить блок відбору мі A (54) ПРИСТРІЙ ОБРОБКИ РАДІОЛОКАЦІЙНОЇ ІНФОРМАЦІЇ 37867 радіолокаційної інформації, що являє собою багатоканальний фільтр допплерівських частот у складі багатоканальної радіолокаційної станції (опублікована заявка РФ № 94 032 128, кл. G01S 7/40, 1996), який містить q допплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає допплерівський фільтр, вхід якого є входом допплерівського фільтрового каналу, лінію затримки з відводами, пристрій усереднення, схему порівняння, порогову схему, регістр затримки та вентильну схему, вихід якої є виходом допплерівського фільтрового каналу, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою. Пристрій стало працює при впливові хаотичних імпульсних завад, несинхронних імпульсних завад, природних та штучних пасивних завад. Недоліком такого пристрою є збільшення помилкового виявлення цілей, якщо використовуються неперервні шумові завади. В основу винаходу поставлено задачу зниження вірогідності помилкових тривог під час дії неперервних шумових завад. Зазначена задача досягається тим, що в пристрої обробки радіолокаційної інформації, який містить q допплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає допплерівський фільтр, вхід якого є входом допплерівського фільтрового каналу, лінію затримки з відводами, пристрій усереднення, схему порівняння, порогову схему, регістр затримки та вентильну схему, вихід якої є виходом допплерівського фільтрового каналу, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою, згідно з винаходом, він містить блок відбору мінімуму з q входами, помножувач, вхід якого з'єднаний з виходом блоку відбору мінімуму, входи q-входової схеми АБО підключені до виходів допплерівських каналів, вхід бінарного накопичувача з'єднаний з виходом q-входової схеми АБО, вихід допплерівського фільтра з'єднаний зі входом амплітудного бінарного квантувача, з першим входом схеми порівняння і відповідним входом блоку відбору мінімуму, перший вхід вентильної схеми підключений до виходу амплітудного бінарного квантувача, а другий вхід з'єднаний з виходом регістру затримки. Другі входи схем порівняння всіх допплерівських каналів об'єднані між собою і підключені до виходу помножувача. Кожен допплерівський канал містить блок визначення рівня шуму та лінію затримки, об'єднані входи яких підключені до виходу допплерівського фільтра, а перший вхід порогової схеми з'єднаний з виходом блоку визначення рівня шуму, а другий вхід з'єднаний з виходом лінії затримки, та додаткову вентильну схему, перший вхід якої підключений до виходу вентильної схеми, другий вхід з'єднаний з виходом порогової схеми, а вихід є виходом допплерівського каналу. Суть винаходу пояснюється блок-схемою запропонованого пристрою, поданою на кресленні (фігура). Пристрій обробки радіолокаційних сигналів, що пропонується, складається з гребінки q допплерівських каналів 1 з об'єднаними входами, що є входом пристрою, блоку відбору мінімуму 2 з q входами, помножувача 3, вхід якого з'єднаний з виходом блоку відбору мінімуму 2, q-входової схеми АБО 4, входи якої підключені до виходів допплерівських каналів 1, бінарного накопичувача 5, вхід якого з'єднаний з виходом q-входової схеми АБО 4, а вихід є виходом пристрою, кожен допплерівський канал 1 містить допплерівський фільтр 6, вхід якого є входом допплерівського каналу 1, амплітудний бінарний квантувач 7, послідовно з'єднані схему порівняння 8 і регістр затримки 9, вихід допплерівського фільтра 6 з'єднаний зі входом амплітудного бінарного квантувача 7, з першим входом схеми порівняння 8 і відповідним входом блоку відбору мінімуму 2, вентильну схему 10, перший вхід якої підключений до виходу амплітудного бінарного квантувача 7, а другий вхід з'єднаний з виходом регістру затримки 9, другі входи схем порівняння 8 всіх допплерівських каналів 1 об'єднані між собою і підключені до виходу помножувача 3, в кожен допплерівський канал 1 введені блок визначення рівня шуму 11 та лінія затримки 12, об'єднані входи яких підключені до виходу допплерівського фільтру 6, порогова схема 13, перший вхід якої з'єднаний з виходом блоку визначення рівня шуму 11, а другий вхід з'єднаний з виходом лінії затримки 12, додаткова вентильна схема 14, перший вхід якої підключений до виходу вентильної схеми 10, другий вхід з'єднаний з виходом порогової схеми 13, а вихід є виходом допплерівського каналу 1. Пристрій працює наступним чином. На об'єднані входи q допплерівських каналів 1 надходить сигнал з виходу приймача імпульснодопплерівської РЛС, в якій здійснюється вобуляція частоти слідування зондуючих імпульсів. Зміна частоти слідування зондуючих імпульсів відбувається через кожні q періодів зондування. В допплерівських фільтрах 6 кожного допплерівського каналу 1 протягом q періодів зондування здійснюється розфільтровка вхідного сигналу в кожному дискреті дальності. В когерентній РЛС фаза сигналу, відбитого від цілі, має постійний міжперіодний набіг. Після розфільтровки сигнал від цілі матиме максимальний відгук в одному з допплерівських каналів 1. Рівень сигналу в інших допплерівських каналах 1 для даного елемента дальності буде визначатись ступенем перекриття амплітудно-частотних характеристик (АЧХ) допплерівських фільтрів та шумами. Під впливом дії некогерентної імпульсної завади міжперіодний набіг фази змінюється скачкоподібно і, крім того, кількість імпульсних завад, що приймаються в даному елементі дальності, не співпадає з числом когерентно накопичених імпульсів q. Тому сигнал імпульсної завади буде мати приблизно однакову амплітуду на виходах допплерівських фільтрів 6 кожного допплерівського каналу 1. Відмінності в розподіленні відгуків по допплерівських каналах 1 під час дії сигналів від цілей та імпульсних завад використовується в пристрої для подавлення імпульсних завад. Інформація з виходів допплерівських фільтрів 6 кожного допплерівського каналу 1 надходить на відповідні входи блоку відбору мінімуму 2, в якому визначається рівень мінімального вихідного сигналу з усіх допплерівських фільтрів б, домножений на заданий коефіцієнт k в помножувачеві 3. Значення коефіцієнту k визначається ступенем нерів 2 37867 номірності розподілу відгуків допплерівських фільтрів 6, викликаних наявністю шумів. Нормована величина з виходу помножувача 3 надходить на об'єднані входи схем порівняння 8 усіх допплерівських каналів 1, на перші входи яких надходить сигнал з виходів відповідних допплерівських фільтрів 6. У випадку, коли останні перевищують нормовану величину, на виході відповідної схеми порівняння 8 формується сигнал логічної одиниці, який затримується в регістрі затримки 9 на час обробки сигналів в амплітудному бінарному квантувачеві 7, на виходах яких формується бінарна інформація. У випадку, коли сигнал на виході допплерівського фільтру 6 в даному елементі дальності одночасно перевищить поріг амплітудного бінарного квантувача 7 і нормовану величину з виходу помножувача 3, на виході вентильної схеми 10 формується сигнал логічної одиниці. Тому як сигнал імпульсної завади не перевищує нормовану величину, то у відповідному елементі дальності на виході схеми порівняння 8 сформується сигнал логічного нуля, який заборонить прохід можливого сигналу логічної одиниці з виходу амплітудного бінарного квантувача 7 через вентильну схему 10. Таким чином відбувається подавлення імпульсних завад. При наявності неперервних шумових завад спрацьовує частина пристрою, що складається з блоку визначення рівня шуму 11, лінії затримки 12 та порогової схеми 13. Оскільки нормована оцінка шумових складових сигналів на виходах доппле рівських фільтрів 6 є величина стала, яка не залежить від часу проведення оцінки, то в пристрій введена тільки одна лінія затримки 12, з допомогою якої вирівнюються затримки в обробці сигналів в різних частинах допплерівських каналів 1 таким чином, щоб результати обробки для різних завадових сигналів співпали у часі. Таким чином, якщо сигнал на виході лінії затримки 12 не перевищує в задане число разів сигнал на виході блоку визначення рівня шуму 11, на виході порогової схеми 13 формується сигнал логічного нуля, що є ознакою наявності неперервних шумових завад. При цьому блокується додаткова вентильна схема 14, формуючи на її виході, що є виходом допплерівського каналу 1, сигнал логічного нуля. Сигнали з виходів допплерівських каналів 1 надходять на входи логічної q-входової схеми АБО 4, де відбувається їх логічне складання. В бінарному накопичувачеві 5, що оброблює бінарні сигнали з виходу q-входової схеми АБО 4, відбувається накопичення цих сигналів протягом часу, коли оброблюються сигнали з різними частотами повторення зондуючих імпульсів. В залежності від результату накопичення бінарної інформації на виході бінарного накопичувача 5 формується сигнал наявності чи відсутності цілі. Таким чином, запропонований пристрій дозволяє досягти, при наявності неперервних шумових завад, відсікання помилково виявлених цілей, що знижує вірогідність помилкових тривог. 3 Фіг. 37867 4 37867 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for processing radar information
Автори англійськоюMyroshnychenko Mykhailo Ivanovych, Kaspyrovych Oleksandr Hennadiiovych, Kononovych Viktor Yakovych, Kopnov Mykhailo Oleksandrovych, Lavrentiev Volodymyr Mykolaiovych, Nemchyn Oleksandr Fedorovych, Mokeiev Yurii Henadiiovych
Назва патенту російськоюУстройство для обработки радиолокационной информации
Автори російськоюМирошниченко Михаил Иванович, Каспирович Александр Геннадиевич, Кононович Виктор Яковлевич, Копнов Михаил Александрович, Лаврентьев Владимир Николаевич, Немчин Александр Федорович, Мокеев Юрий Геннадиевич
МПК / Мітки
МПК: G01S 13/526, G01S 7/40, G01S 13/00
Мітки: пристрій, обробки, інформації, радіолокаційної
Код посилання
<a href="https://ua.patents.su/5-37867-pristrijj-obrobki-radiolokacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій обробки радіолокаційної інформації</a>
Пристрій обробки радіолокаційної інформації
Номер патенту: 39461
Опубліковано: 15.06.2001
Автори: Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 13/00, G01S 13/56
Мітки: пристрій, радіолокаційної, обробки, інформації
Формула / Реферат:
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплеровських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплеровський фільтр, вхід якого є входом доплерівського фільтрового каналу, q-входову схему АБО та бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, який ваідрізняється тим, що кожний доплеровський канал містить блок визначення рівня шуму та лінію затримки, об'єднані...
Пристрій критерійної обробки радіолокаційної інформації
Номер патенту: 37866
Опубліковано: 15.05.2003
Автори: Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, МАЙ ІГОР ДМИТРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 13/526, G01S 7/40, G01S 13/00
Мітки: інформації, обробки, критерійної, пристрій, радіолокаційної
Формула / Реферат:
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті та вирішувальний блок, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом блока синхронізації, блок обробки, ланцюжок з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключеними до четвертого виходу блока синхронізації, вирішувальний блок...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мирошниченко Михайло Іванович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, МАЙ ІГОР ДМИТРОВИЧ
МПК: G01S 13/00, G01S 13/42, G01S 13/526
Мітки: радіолокаційної, пристрій, інформації, сигналів, обробки
Формула / Реферат:
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки,...
Пристрій автоматичного виявлення сигналів інформації
Номер патенту: 37870
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, Козловський Петро Леонідович, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович
МПК: G01S 7/36
Мітки: автоматичного, сигналів, пристрій, інформації, виявлення
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Система обробки інформації
Номер патенту: 37904
Опубліковано: 16.12.2002
Автори: П'ятничко Олександр Іванович, Рудник Анатолій Андрійович, Немчин Олександр Федорович, Соболевський Сергій Миронович, Панікарська Ольга Іванівна, Рибчин Ілля Йосипович, Юревич Михайло Тадейович, Бугай Юрій Миколайович, Яценко Олег Володимирович, Карп Ігор Миколайович
МПК: H05K 10/00, G06F 11/16, G06F 9/40
Мітки: інформації, обробки, система
Формула / Реферат:
Система обробки інформації, що містить схему послідовного зв'язку, сполучену з об'єктом управління, яка відрізняється тим, що вона оснащена логічним контролером, що містить процесор управління, багатоканальну схему дискретного вводу, багатоканальну схему дискретного виводу, багатоканальну схему аналогового вводу, багатоканальну схему аналогового виводу та загальну схему послідовного зв'язку, входи-виходи яких сполучені загальною шиною,...
Попередній патент: Пристрій критерійної обробки радіолокаційної інформації
Наступний патент: Пристрій автоматичного виявлення сигналів
Випадковий патент: Перетворювач напруга-вірогідність