Спосіб орієнтованого контролю об’єктів
Номер патенту: 38140
Опубліковано: 25.12.2008
Автори: Ларін Віталій Юрійович, Квасніков Володимир Павлович, Харченко Володимир Петрович
Формула / Реферат
Спосіб орієнтованого контролю об'єктів, заснований на використанні замкнутої сферичної поверхні, яка забезпечена з двох протилежних кінців провідниками, які замикає ртутна крапля, з можливістю переміщення усередині сферичного еліпсоїда, який відрізняється тим, що чутливий елемент пристрою орієнтованого контролю об'єкта виконують у вигляді зовнішньої і внутрішньої півсфер, а краплю ртуті розміщують усередині них, завдяки чому обмежують переміщення краплі ртуті, у випадках перекидання об'єкта або в умовах невагомості, а сам сферичний чутливий елемент встановлюють на об'єкті так, щоб ртутна крапля знаходилася на центральному контактному майданчику (полюсі) півсфери, і це положення вважають базовим, нижня частина півсфери оснащена рівновіддаленими струмопровідними майданчиками, які кодують, а контакти з майданчиків виводять на зовнішню сторону нижньої півсфери, при цьому внутрішня півсфера є струмопровідною і заземленою, а провідники підключають до пристрою ідентифікації місцеположення ртутної краплі, яка при зміні орієнтованого положення об'єкта переміщена у відповідне положення, вказуючи на нове орієнтоване положення, яке заносять в базу даних, порівнюють з положенням, відповідним базовому, і ідентифікують нове орієнтоване положення контрольованого об'єкта.
Текст
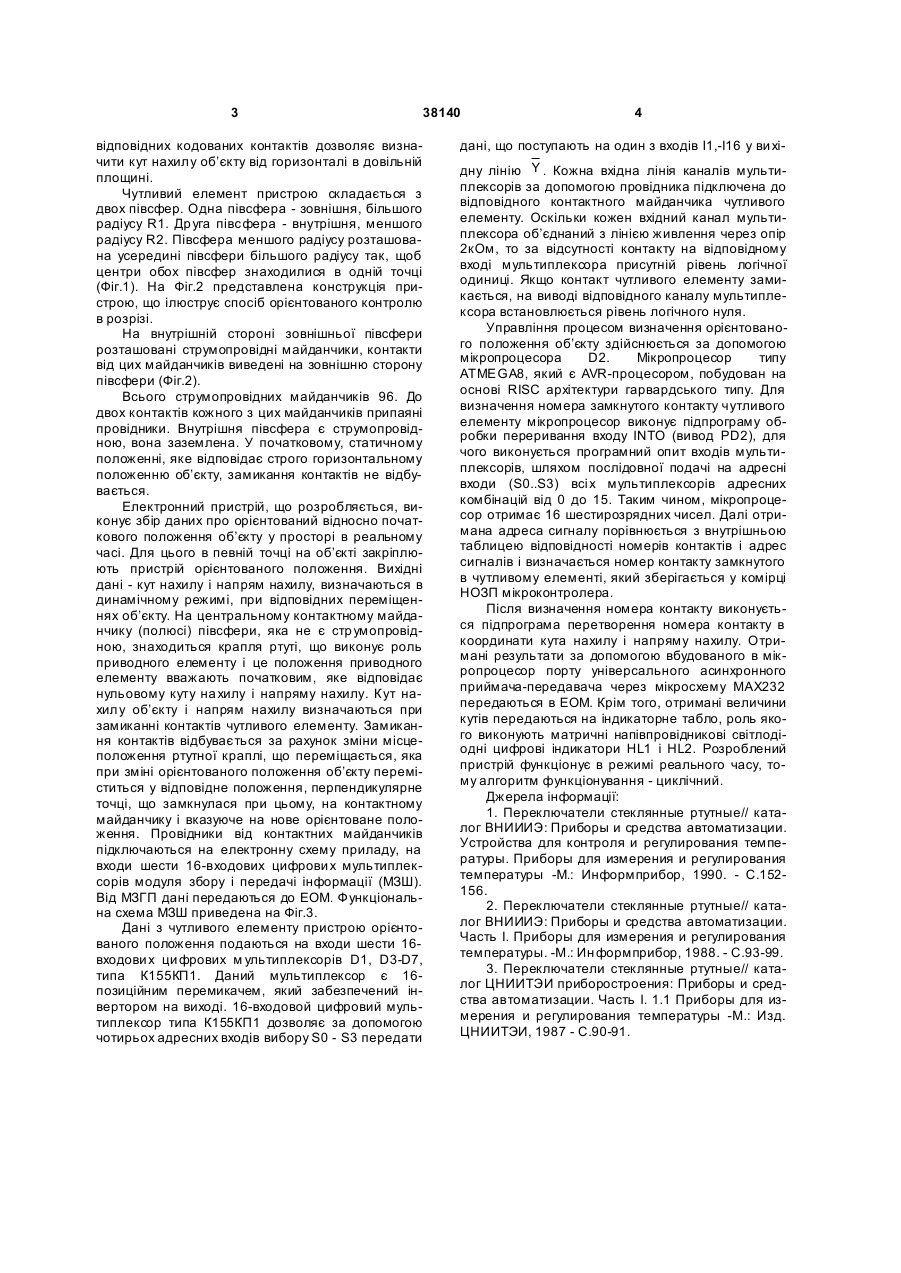
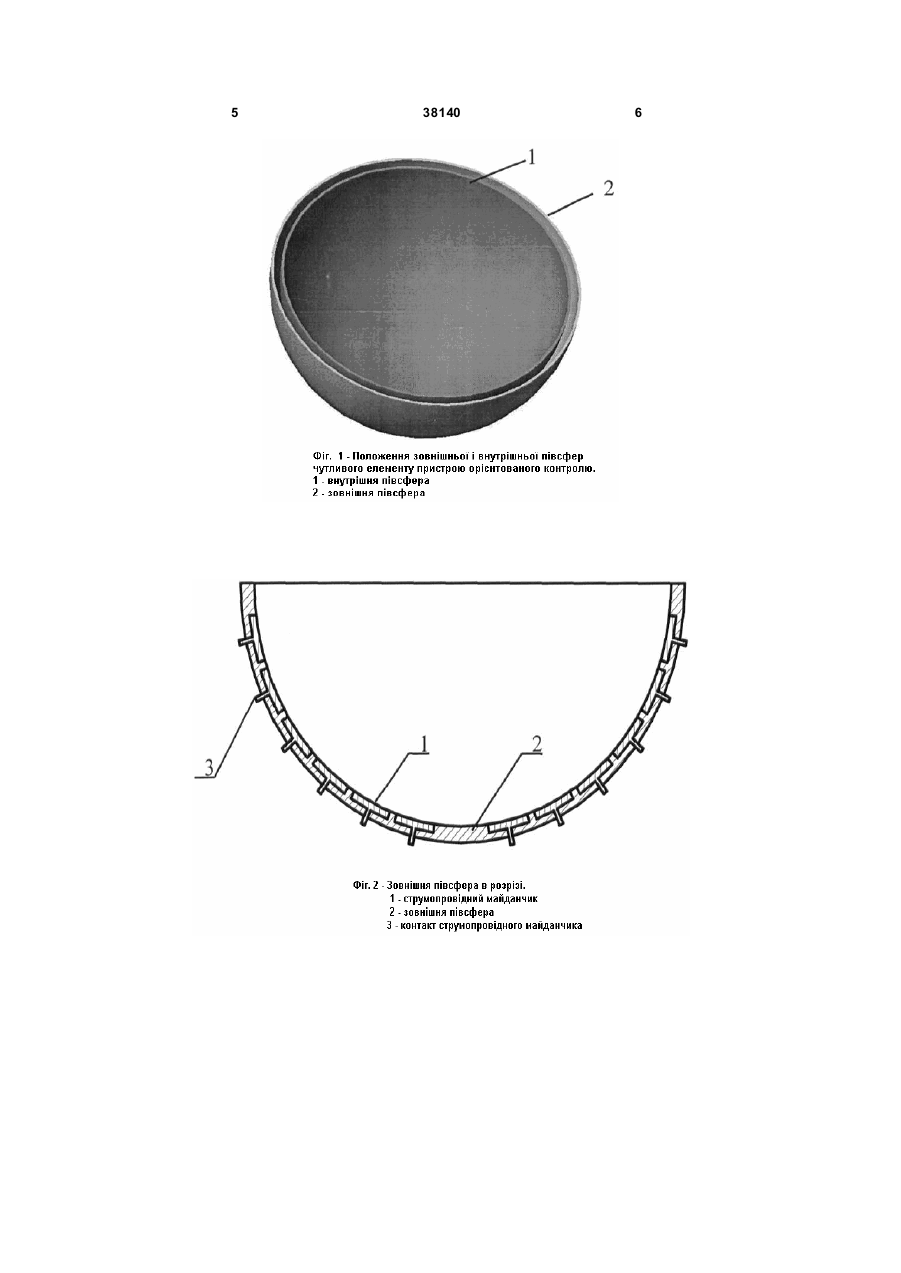
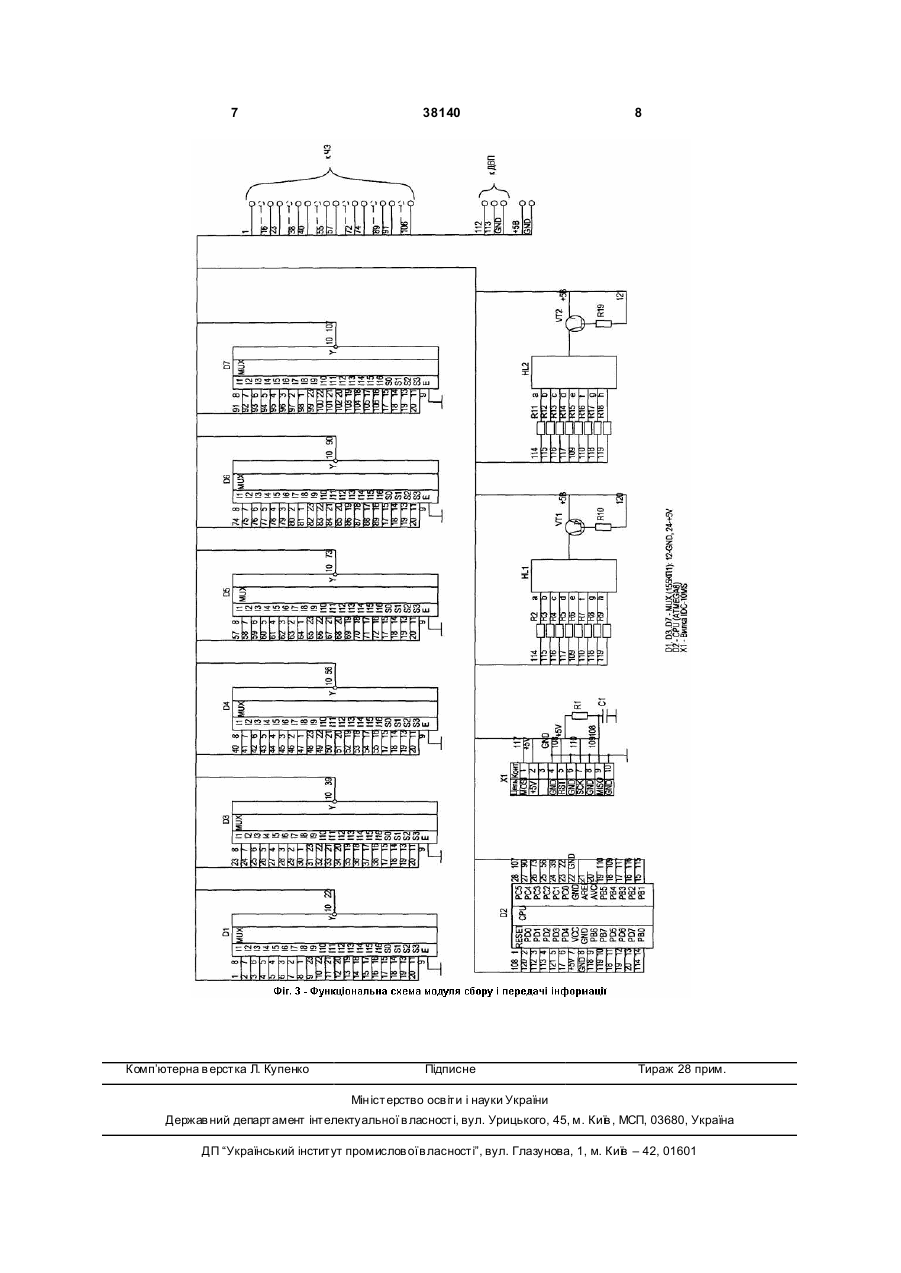
Спосіб орієнтованого контролю об'єктів, заснований на використанні замкнутої сферичної поверхні, яка забезпечена з двох протилежних кінців провідниками, які замикає ртутна крапля, з можливістю переміщення усередині сферичного еліпсоїда, який відрізняє ться тим, що чутливий елемент пристрою орієнтованого контролю об'єкта виконують у вигляді зовнішньої і внутрішньої півсфер, а краплю ртуті розміщують усередині них, завдяки чому обмежують переміщення краплі рту 3 38140 відповідних кодованих контактів дозволяє визначити кут нахилу об’єкту від горизонталі в довільній площині. Чутливий елемент пристрою складається з двох півсфер. Одна півсфера - зовнішня, більшого радіусу R1. Др уга півсфера - внутрішня, меншого радіусу R2. Півсфера меншого радіусу розташована усередині півсфери більшого радіусу так, щоб центри обох півсфер знаходилися в одній точці (Фіг.1). На Фіг.2 представлена конструкція пристрою, що ілюструє спосіб орієнтованого контролю в розрізі. На внутрішній стороні зовнішньої півсфери розташовані струмопровідні майданчики, контакти від цих майданчиків виведені на зовнішню сторону півсфери (Фіг.2). Всього струмопровідних майданчиків 96. До двох контактів кожного з цих майданчиків припаяні провідники. Внутрішня півсфера є струмопровідною, вона заземлена. У початковому, статичному положенні, яке відповідає строго горизонтальному положенню об’єкту, замикання контактів не відбувається. Електронний пристрій, що розробляється, виконує збір даних про орієнтований відносно початкового положення об’єкту у просторі в реальному часі. Для цього в певній точці на об’єкті закріплюють пристрій орієнтованого положення. Вихідні дані - кут нахилу і напрям нахилу, визначаються в динамічному режимі, при відповідних переміщеннях об’єкту. На центральному контактному майданчику (полюсі) півсфери, яка не є стр умопровідною, знаходиться крапля ртуті, що виконує роль приводного елементу і це положення приводного елементу вважають початковим, яке відповідає нульовому куту на хилу і напряму нахилу. Кут нахилу об’єкту і напрям нахилу визначаються при замиканні контактів чутливого елементу. Замикання контактів відбувається за рахунок зміни місцеположення ртутної краплі, що переміщається, яка при зміні орієнтованого положення об’єкту переміститься у відповідне положення, перпендикулярне точці, що замкнулася при цьому, на контактному майданчику і вказуюче на нове орієнтоване положення. Провідники від контактних майданчиків підключаються на електронну схему приладу, на входи шести 16-входових цифрови х мультиплексорів модуля збору і передачі інформації (МЗШ). Від МЗГП дані передаються до ЕОМ. Функціональна схема МЗШ приведена на Фіг.3. Дані з чутливого елементу пристрою орієнтованого положення подаються на входи шести 16входови х ци фрових м ультиплексорів D1, D3-D7, типа К155КП1. Даний мультиплексор є 16позиційним перемикачем, який забезпечений інвертором на виході. 16-входовой цифровий мультиплексор типа К155КП1 дозволяє за допомогою чотирьох адресних входів вибору S0 - S3 передати 4 дані, що поступають на один з входів І1,-І16 у ви хідну лінію Y . Кожна вхідна лінія каналів мультиплексорів за допомогою провідника підключена до відповідного контактного майданчика чутливого елементу. Оскільки кожен вхідний канал мультиплексора об’єднаний з лінією живлення через опір 2кОм, то за відсутності контакту на відповідному вході мультиплексора присутній рівень логічної одиниці. Якщо контакт чутливого елементу замикається, на виводі відповідного каналу мультиплексора встановлюється рівень логічного нуля. Управління процесом визначення орієнтованого положення об’єкту здійснюється за допомогою мікропроцесора D2. Мікропроцесор типу ATMEGA8, який є AVR-процесором, побудован на основі RISC архітектури гарвардського типу. Для визначення номера замкнутого контакту чутливого елементу мікропроцесор виконує підпрограму обробки переривання входу INTO (вивод PD2), для чого виконується програмний опит входів мультиплексорів, шляхом послідовної подачі на адресні входи (S0..S3) всі х мультиплексорів адресних комбінацій від 0 до 15. Таким чином, мікропроцесор отримає 16 шестирозрядних чисел. Далі отримана адреса сигналу порівнюється з внутрішньою таблицею відповідності номерів контактів і адрес сигналів і визначається номер контакту замкнутого в чутливому елементі, який зберігається у комірці НОЗП мікроконтролера. Після визначення номера контакту виконується підпрограма перетворення номера контакту в координати кута нахилу і напряму нахилу. Отримані результати за допомогою вбудованого в мікропроцесор порту універсального асинхронного приймача-передавача через мікросхему МАХ232 передаються в ЕОМ. Крім того, отримані величини кутів передаються на індикаторне табло, роль якого виконують матричні напівпровідникові світлодіодні цифрові індикатори НL1 і HL2. Розроблений пристрій функціонує в режимі реального часу, тому алгоритм функціонування - циклічний. Джерела інформації: 1. Переключатели стеклянные ртутные// каталог ВНИИИЭ: Приборы и средства автоматизации. Устройства для контроля и регулирования температуры. Приборы для измерения и регулирования температуры -М.: Информприбор, 1990. - С.152156. 2. Переключатели стеклянные ртутные// каталог ВНИИИЭ: Приборы и средства автоматизации. Часть I. Приборы для измерения и регулирования температуры. -М.: Ин формприбор, 1988. - С.93-99. 3. Переключатели стеклянные ртутные// каталог ЦНИИТЭИ приборостроения: Приборы и средства автоматизации. Часть I. 1.1 Приборы для измерения и регулирования температуры -М.: Изд. ЦНИИТЭИ, 1987 - С.90-91. 5 38140 6 7 Комп’ютерна в ерстка Л. Купенко 38140 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for directed control of objects
Автори англійськоюLarin Vitalii Yuriiovych, Kharchenko Volodymyr Petrovych, Kvasnikov Volodymyr Pavlovych
Назва патенту російськоюСпособ ориентированного контроля объектов
Автори російськоюЛарин Виталий Юрьевич, Харченко Владимир Петрович, Квасников Владимир Павлович
МПК / Мітки
МПК: G01C 23/00
Мітки: контролю, спосіб, орієнтованого, об'єктів
Код посилання
<a href="https://ua.patents.su/4-38140-sposib-oriehntovanogo-kontrolyu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб орієнтованого контролю об’єктів</a>
Спосіб заточування голчатої поверхні торцем орієнтованого круга
Номер патенту: 14241
Опубліковано: 15.05.2006
Автор: Кальченко Володимир Віталійович
МПК: B24B 19/00
Мітки: круга, спосіб, голчатої, поверхні, торцем, орієнтованого, заточування
Формула / Реферат:
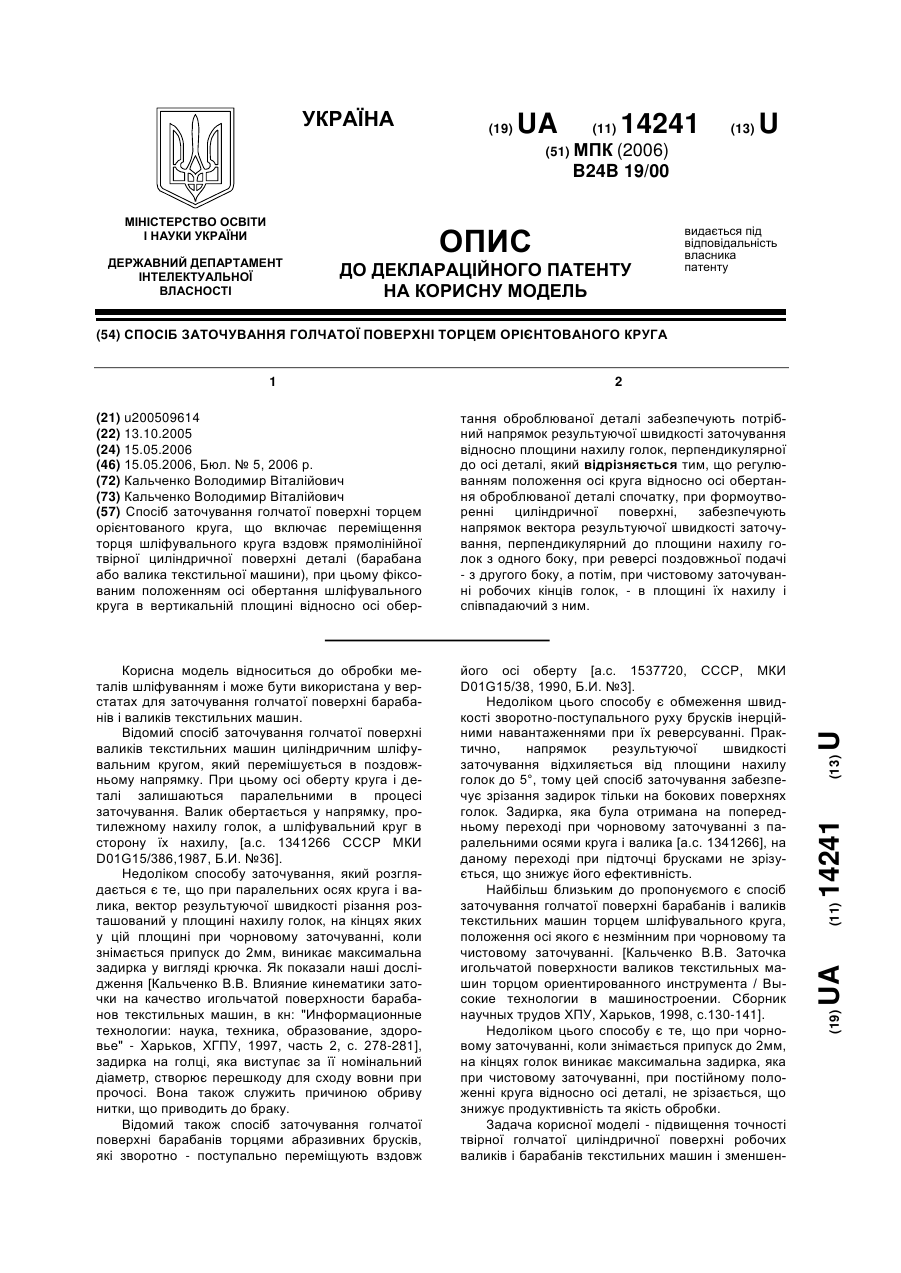
Спосіб заточування голчатої поверхні торцем орієнтованого круга, що включає переміщення торця шліфувального круга вздовж прямолінійної твірної циліндричної поверхні деталі (барабана або валика текстильної машини), при цьому фіксованим положенням осі обертання шліфувального круга в вертикальній площині відносно осі обертання оброблюваної деталі забезпечують потрібний напрямок результуючої швидкості заточування відносно площини нахилу голок,...
Спосіб заточування голчатої поверхні периферією і торцем орієнтованого круга
Номер патенту: 14240
Опубліковано: 15.05.2006
Автор: Кальченко Володимир Віталійович
МПК: B24B 19/00
Мітки: периферією, голчатої, спосіб, торцем, заточування, круга, поверхні, орієнтованого
Формула / Реферат:
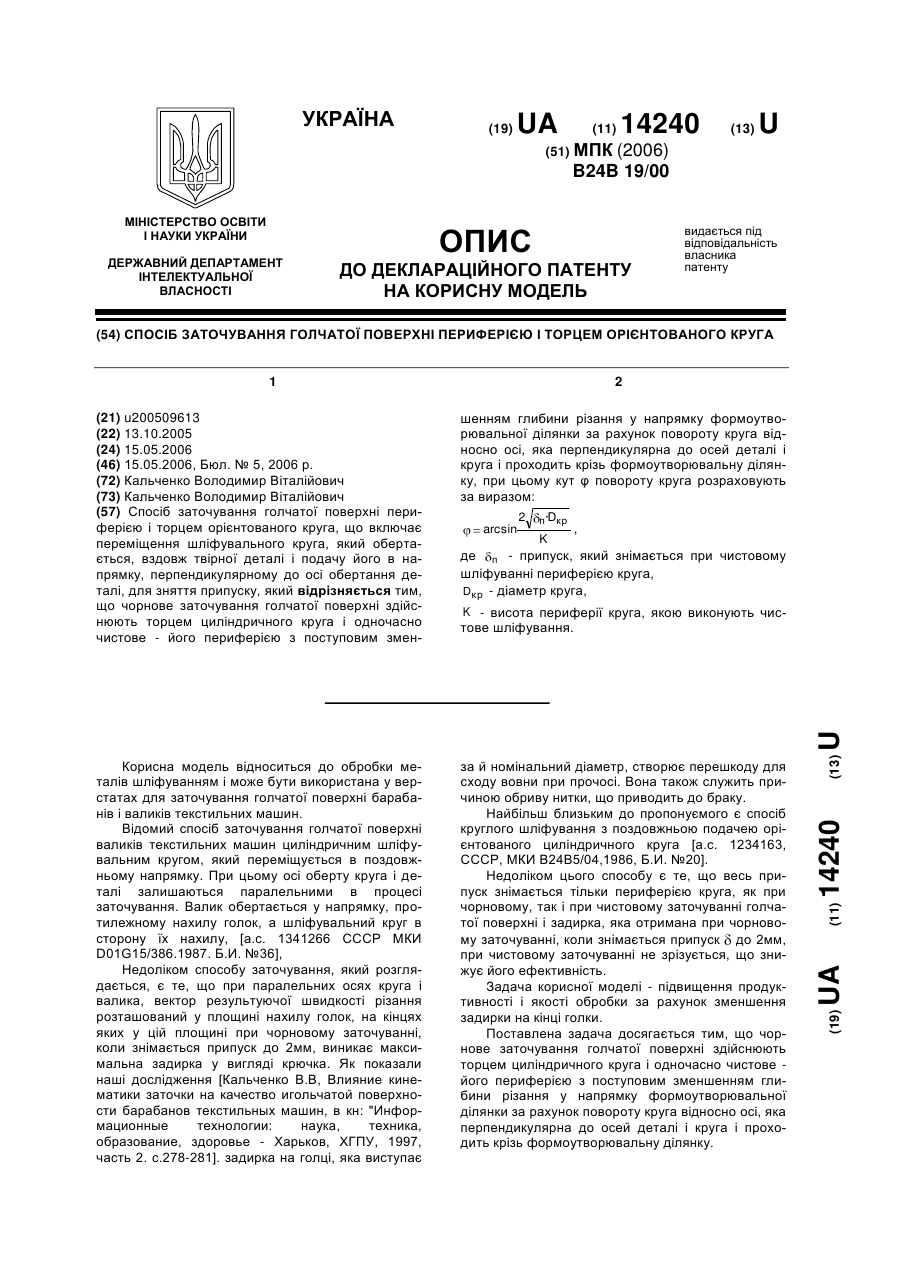
Спосіб заточування голчатої поверхні периферією і торцем орієнтованого круга, що включає переміщення шліфувального круга, який обертається, вздовж твірної деталі і подачу його в напрямку, перпендикулярному до осі обертання деталі, для зняття припуску, який відрізняється тим, що чорнове заточування голчатої поверхні здійснюють торцем циліндричного круга і одночасно чистове - його периферією з поступовим зменшенням глибини різання у напрямку...
Пристрій для орієнтованого закручування гвинтів
Номер патенту: 10522
Опубліковано: 15.11.2005
Автор: Молочко Іван В'ячеславович
МПК: B25B 21/00
Мітки: гвинтів, закручування, орієнтованого, пристрій
Формула / Реферат:
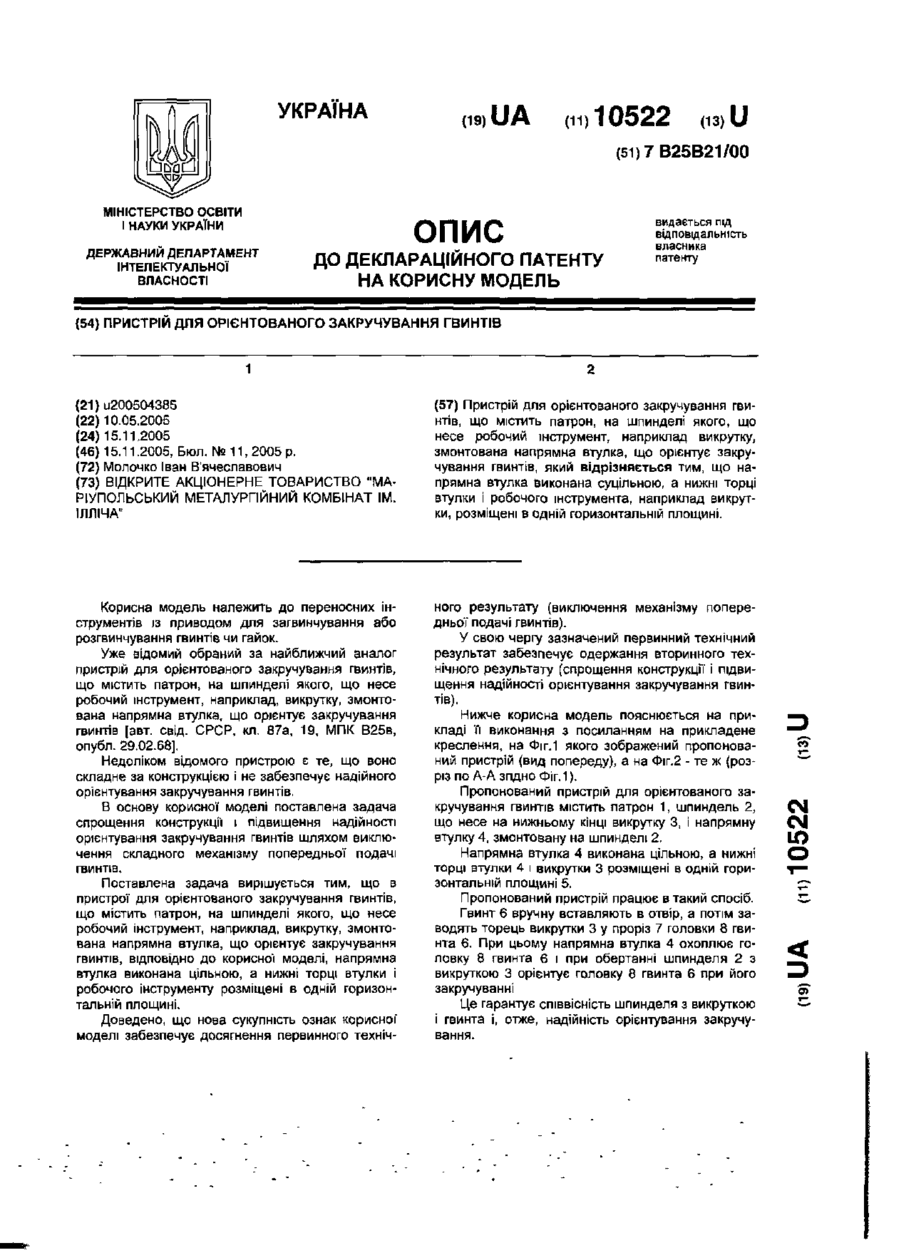
Пристрій для орієнтованого закручування гвинтів, що містить патрон, на шпинделі якого, що несе робочий інструмент, наприклад викрутку, змонтована напрямна втулка, що орієнтує закручування гвинтів, який відрізняється тим, що напрямна втулка виконана суцільною, а нижні торці втулки і робочого інструмента, наприклад викрутки, розміщені в одній горизонтальній площині.
Пристрій для орієнтованого укладання стрижнеподібних виробів
Номер патенту: 8161
Опубліковано: 15.07.2005
Автор: Севостьянов Павло Іванович
МПК: B65B 35/00
Мітки: укладання, виробів, орієнтованого, пристрій, стрижнеподібних
Формула / Реферат:
1. Пристрій для орієнтованого укладання стрижнеподібних виробів, що містить привід, орієнтувальну решітку, яка складається з вертикально розташованих паралельних пластин, відстані між якими менші від довжин стрижнеподібних виробів, що виконані з можливістю їх переміщення за допомогою привода, який відрізняється тим, що містить рухомий візок, який виконаний з можливістю розміщення на ньому тари, орієнтувальна решітка виконана з можливістю...
Спосіб орієнтованого укладання сталевої фібри в тару типу ящиків
Номер патенту: 68696
Опубліковано: 12.11.2007
Автор: Кричевський Олександр Павлович
МПК: B65G 47/00, B65B 35/00, B65B 39/00, B65B 5/00
Мітки: спосіб, фібри, типу, сталевої, орієнтованого, ящиків, тару, укладання
Формула / Реферат:
1. Спосіб орієнтованого укладання сталевої фібри в тару типу ящиків, що включає установку в тару розділювальних стінок і їхню фіксацію в ящику із заданою відстанню між ними, подачу фібри в тару, орієнтацію фібр в одному напрямку шляхом надання тарі змушених коливань і/або короткочасних силових імпульсів типу вібрацій або ударів таким чином, що фібра, що має довільну орієнтацію, при падінні на розділювальні стінки повертається і падає між...
Попередній патент: Енергозберігаюча ректифікаційна установка для виробництва спирту етилового-сирцю
Наступний патент: Прилад для порівняльної оцінки протизносних і антифрикційних властивостей елементів трибосистем
Випадковий патент: Спосіб отримання заданого значення імпульсів