Спосіб контролю протікання технологічного процесу в сільськогосподарських машинах
Формула / Реферат
1. Спосіб контролю протікання технологічного процесу в сільськогосподарських машинах, що включає реєстрацію проходження об'єктів по каналу контролю, шляхом формування імпульсів від кожного об'єкта, заданиям порогових рівней кількості імпульсів і порівняння з кількістю імпульсів від об'єктів в каналі контролю та формування вихідних сигналів, який відрізняється тим, що пройдений машиною шлях фіксують числом імпульсів, фіксують порогові рівні кількості імпульсів, що встановлюють відповідно класам гістограми розподілу об'єктів по шляху машини, причому розмір каналу контролю в напрямку проходження об'єктів встановлюють співмірним розмірам об'єктів.
2. Спосіб по п. 1, який відрізняється тим, що розмір каналу контролю в напрямку проходження об'єктів регулюють екрануванням зони контролю.
3. Спосіб по пп. 1, 2, який відрізняється тим, що імпульси від об'єктів формують по екстремумам сигналів від названих об'єктів.
Текст
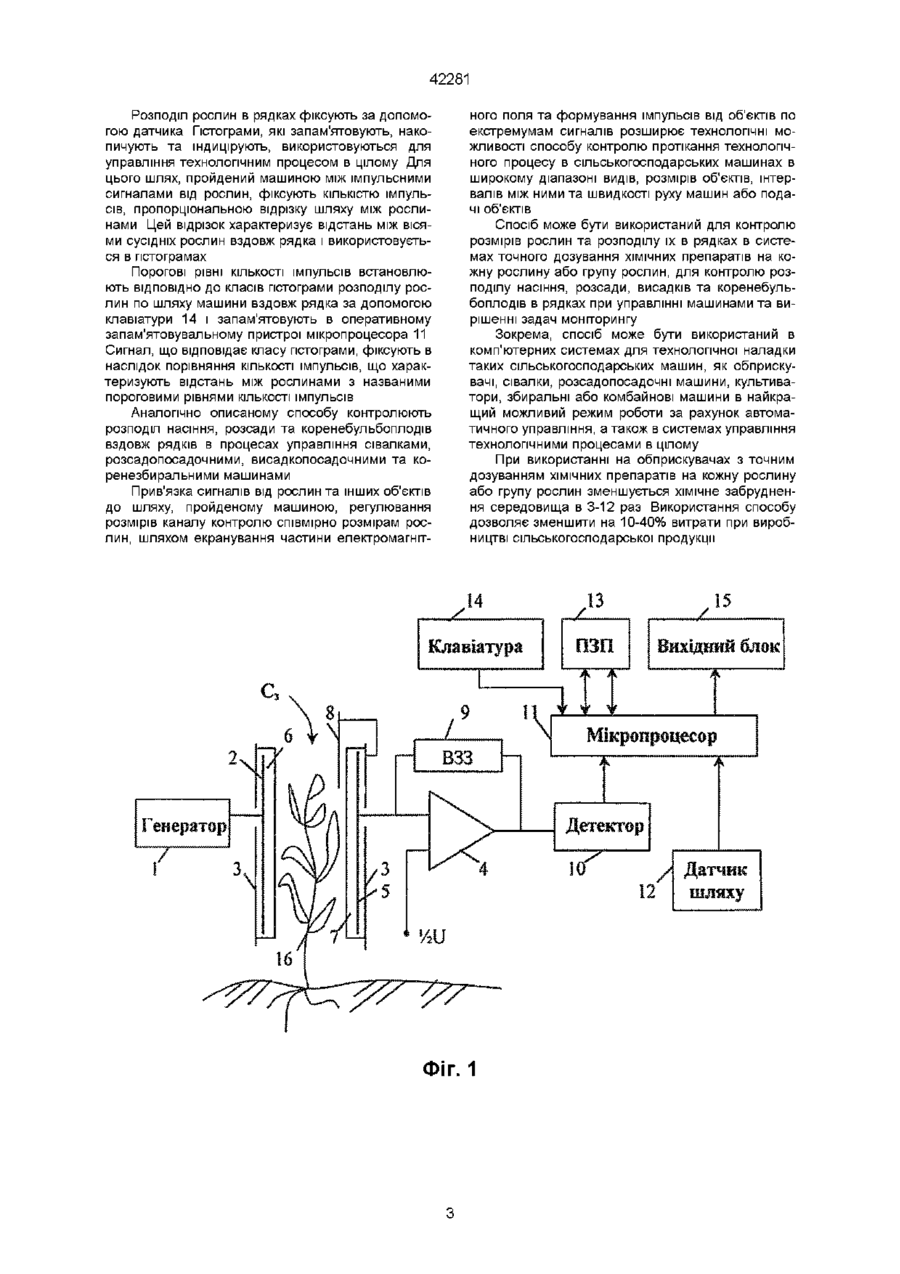
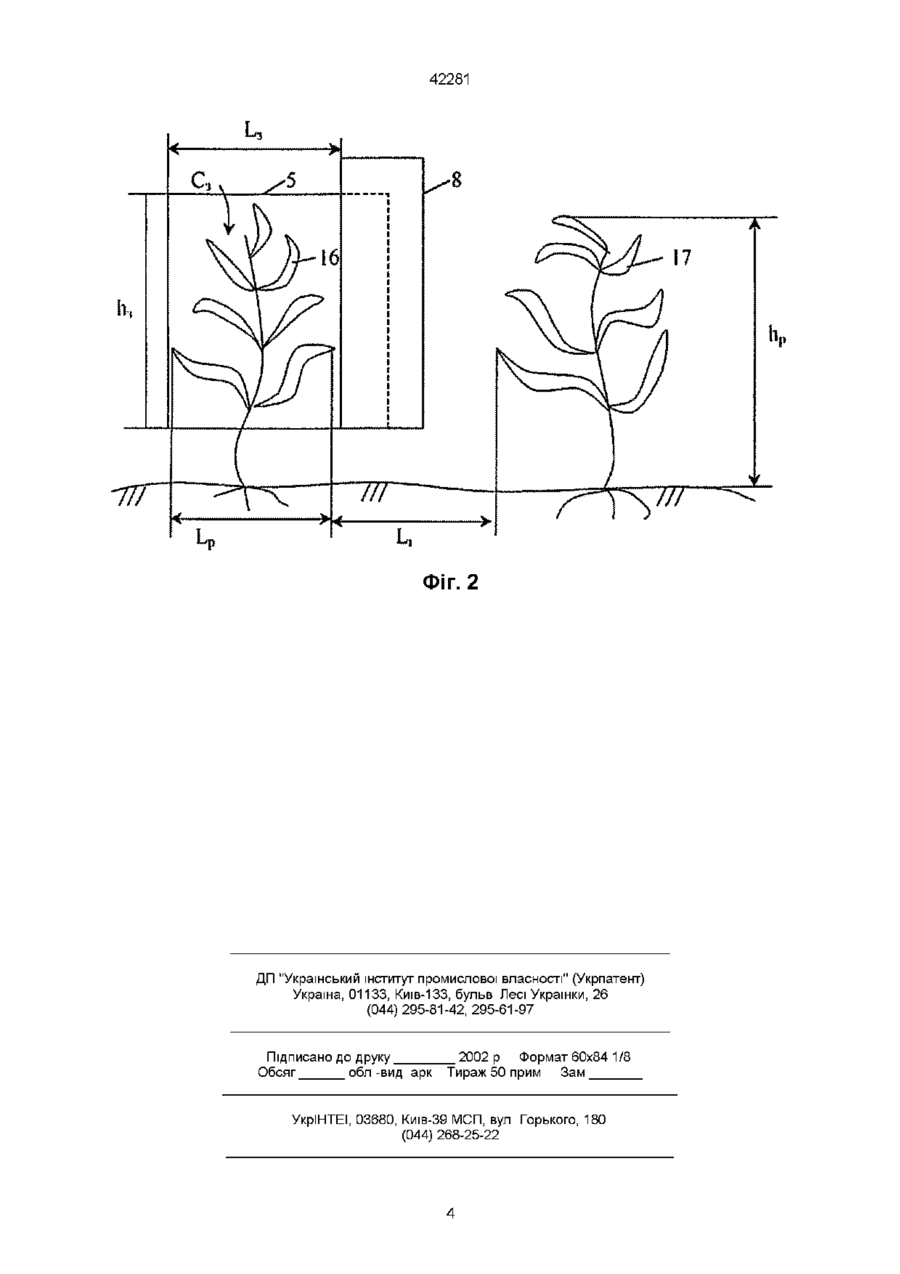
1 Спосіб контролю протікання технологічного процесу в сільськогосподарських машинах, що включає реєстрацію проходження об'єктів по каналу контролю, шляхом формування імпульсів від кожного об'єкта, заданиям порогових рівней КІЛЬКОСТІ імпульсів і порівняння з КІЛЬКІСТЮ імпульсів від об'єктів в каналі контролю та формування вихі Винахід відноситься до сільського господарства, а саме, стосується пристроїв для контролю висіву насіння та добрив, розподілу рослин в рядках, факелів обприскувачів, посадки розсади та коренебульбоплодів та розподілу інших об'єктів в сільському господарстві Відомий спосіб контролю протікання технологічних процесів в сільськогосподарських машинах, що включає реєстрацію проходження об'єктів по каналу, шляхом формування імпульсів від кожного об'єкта, формування КІЛЬКОСТІ імпульсів від об'єктів в каналі контролю за заданий часовий інтервал, задания порогових рівней КІЛЬКОСТІ імпульсів і порівняння з заданими пороговими рівнями КІЛЬКОСТІ імпульсів та формування вихідних сигналів (Патент СРСР № 1716943, А01С7/00, G07C5/10, 1992, бюл №8) Недоліки відомого способу полягають в звуженні його технологічних можливостей через недостатню точність формування імпульсів від об'єктів, відносно шляху, пройденому машиною, в широкому діапазоні видів та розмірів об'єктів, інтервалів між ними та швидкості руху машини чи подачі об'єктів В основу винаходу поставлено задачу - спосіб контролю протікання технологічного процесу в сільськогосподарських машинах шляхом прив'язки сигналів від об'єктів до шляху, пройденого машиною, та формування імпульсів від об'єктів по екстремумам сигналів, регулюванням розмірів каналу контролю в напрямку проходження об'єктів, забез дних сигналів, який відрізняється тим, що пройдений машиною шлях фіксують числом імпульсів, фіксують порогові рівні КІЛЬКОСТІ імпульсів, що встановлюють ВІДПОВІДНО класам гістограми розподілу об'єктів по шляху машини, причому розмір каналу контролю в напрямку проходження об'єктів встановлюють співмірним розмірам об'єктів 2 Спосіб по п 1, який відрізняється тим, що розмір каналу контролю в напрямку проходження об'єктів регулюють екрануванням зони контролю 3 Спосіб по пп 1, 2, який відрізняється тим, що імпульси від об'єктів формують по екстремумам сигналів від названих об'єктів печення розширення технологічних можливостей способу в діапазоні розмірів об'єктів, інтервалів між ними та швидкості руху машини чи подачі об'єктів Це досягається тим, що в способі контролю протікання технологічного процесу в сільськогосподарських машинах, що включає реєстрацію проходження об'єктів по каналу контролю, шляхом формування імпульсів від кожного об'єкта, заданиям порогових рівней КІЛЬКОСТІ імпульсів і порівняння з КІЛЬКІСТЮ імпульсів від об'єктів в каналі контролю та формування вихідних сигналів, згідно з винаходом, пройдений машиною шлях фіксують числом імпульсів, порогові рівні КІЛЬКОСТІ імпульсів встановлюють ВІДПОВІДНО ДО класів гістограми розподілу об'єктів по шляху машини, причому розмір каналу контролю в напрямку проходження об'єктів встановлюється співмірним їх розмірам Це дає можливість прив'язати імпульси від об'єктів до шляху, пройденому машиною, поділити їх по класах гістограми та забезпечити надійне отримання імпульсів від кожного з об'єктів за рахунок встановлення розміру каналу контролю в напрямку проходження об'єктів, чим розширити технологічні можливості способу в умовах зміни розмірів об'єктів, наприклад, рослин в рядках, насіння та коренебульбоплодів Важливо, що розмір каналу контролю в напрямку проходження об'єктів регулюють екрануванням зони контролю 00 42281 Це розширює технологічні можливості способу в широкому діапазоні розмірів об'єктів, наприклад, рослин на полі, насіння і коренебульбоплодів Важливо, що імпульси від об'єктів формуються по екстремумам сигналів від названих об'єктів Це розширює технологічні можливості при ЗМІНІ швидкості руху машини в широкому діапазоні На фіг 1 показана схема пристрою для здійснення способу, на фіг 2 - електрод пристрою з додатковим рухомим екранувальним електродом Пристрій по фіг 1 в складі генератора 1 електромагнітних коливань, електрично зв'язаного з електродом 2, а також операційного підсилювача 4, електрично зв'язаного з електродом 5 Електроди 2 і 5, наприклад, утоплені в діелектричні прокладки 6 і 7 Названі діелектричні прокладки закріплені на екрані 3, наприклад, приклеєні Зі сторони зони контролю між електродами 2 і 5 змонтований хоча б один додатковий рухомий екранувальний електрод 8 (фіг 1, 2) Операційний підсилювач 4 охоплений ланкою від'ємного зворотного зв'язку 9, виконаною, наприклад, у вигляді паралельно включених конденсатора і резистора Вихід операційного підсилювача 4 зв'язаний зі входом амплітудного детектора 10, в схему якого включений високочастотний фільтр Вихід амплітудного детектора 10 зв'язаний зі АЦП входом мікропроцесора 11, наприклад, через екстрематор З другим із входів мікропроцесора 11 зв'язаний датчик шляху 12, пройденого машиною, виконаний, наприклад, на індуктивному датчику, зв'язаному з колесом машини 3 мікропроцесором зв'язаний постійний запам'ятовуючий пристрій 13 та клавіатура 14 3 виходом мікропроцесора 11 зв'язаний вихідний блок 15 в складі індикатора та ланок управління і зовнішнього зв'язку Оперативний запам'ятовувальний пристрій виконаний, наприклад, в схемі мікропроцесора 11 Згідно ЗІ способом контроль протікання технологічного процесу в сільськогосподарських машинах, наприклад, на обприскувачі з точним дозуванням ХІМІЧНИХ препаратів на кожну рослину чи групу рослин здійснюють таким чином За допомогою генератора 1 в каналі між електродами 2 і З збуджують електричне поле в діапазоні частот від 20 кГц до 10 МГц, наприклад, на частоті 450 кГц В цьому діапазоні частот електричні властивості матеріалів найменш залежать від вологості матеріалів, використовуються найбільш прості і стабільні елементи та забезпечується найменший вплив ЗОВНІШНІХ електромагнітних завад Для точного дозування ХІМІЧНИХ препаратів необхідно контролювати розміри рослин та їх розподіл в рядках При цьому розміри рослин можливо оцінити по площі проекції рослин 16 і 17 на поверхню електрода 5 (фіг 2) При цьому рослина виконує роль екрану, зменшуючи величину струму між електродами 2 і 5, який компенсує струм ланки від'ємного зворотного зв'язку Завдяки цьому вихідна напруга иВих операційного підсилювача не залежить від ємності між екраном 3 і електродом 5 U B MX-C3Z33U m axSin Cot, ДЄ С3 ЄМНІСТЬ ЗОНИ КОНТРОЛЮ між електродами 2 і 5, и т а х - амплітуда, cot - кругова частота високочастотної напруги В реальному масштабі часу UBMx-UmaxCOS7iV/l_3, де V - швидкість руху машини, І_з - розмір зони контролю вздовж рядка рослин (фіг 2) Після детектора 10 сигнал поступає на вхід мікропроцесора 11, який обчислює амплітуду корисного сигналу л _ 2L3Um де І_і - відстань між рослинами 16 і 17 (фіг 2), п - номер гармоніки В зв'язку з тим, що амплітуда сигналу від рослини не залежить від швидкості руху машини, тому и використовують для контролю розмірів рослини З точки зору оптимального співвідношення площин електрода 5 та проекцій на нього рослин 16, 17 різних культур та стадій їх розвитку (соняшника, кукурудзи, буряків, картоплі та інших овочів), а також співвідношення розміру рослини І_р вздовж рядка та відстані між ними L, задають необхідний розмір каналу контролю вздовж рядка І_з Для цього використовується додатковий рухомий екранувальний електрод 8 Очевидно, що амплітуда сигналу від рослини буде максимальна, коли розміри каналу контролю та його висота h вздовж рядка L буде співмірним розміру рослини вздовж рядка І_р та по висоті hp (фіг 2) Тому доцільно використовування додаткового рухомого екранувального електрода 8 для регулювання зони контролю також по висоті Из (фіг 2 ) При регулюванні розмірів каналу контролю вздовж рядка та по висоті досягається оптимальне співвідношення між сигналами на виході підсилювача 4 при наявності або відсутності рослини в каналі контролю Екстремум сигналу від кожної рослини оцінюють за допомогою мікропроцесора 11 програмним шляхом Для цього пристрій тарують на реальних рослинах та записують отримані дані в оперативній пам'яті мікропроцесора 11 ВІДПОВІДНІ сигнали по командах з клавіатури 14 Клавіатурою 14 вибирають також параметри, що відповідають виду рослин і середньої норми внесення ХІМІЧНОГО препарату 3 постійного запам'ятовуючого пристрою 13 виводять сигнали, що характеризують поправочні коефіцієнти для точного дозування ХІМІЧНОГО препарату залежно від виду рослин та розміру кожної з них ВІДПОВІДНІ керуючі сигнали поступають через вихідний блок 15 в схеми управління дозуванням ХІМІЧНОГО препарату Для включення подачі ХІМІЧНОГО препарату на рослину та контролю розподілу рослин в рядках за допомогою екстрематора чи безпосередньо мікропроцесора формують імпульс, що відповідає екстремуму сигналу від кожної рослини Цей імпульсний сигнал фіксують в оперативному запам'ятовувальному пристрої мікропроцесора 11, на один із входів якого з виходу датчика 12 поступають імпульси пропорцюнально шляху, пройденому машиною, наприклад, обприскувачем Імпульсами, що відповідають екстремумам сигналів від кожної рослини, включають подачу ХІМІЧНОГО препарату на кожну рослину, КІЛЬКІСТЬ якого регулюють, як описано вище, залежно від заданої норми, виду та розміру рослини і швидкості руху машини, яку контролюють по КІЛЬКОСТІ імпульсів від датчика шляху 12 за одиницю шляху 42281 Розподіл рослин в рядках фіксують за допомогою датчика Гістограми, які запам'ятовують, накопичують та індицірують, використовуються для управління технологічним процесом в цілому Для цього шлях, пройдений машиною між імпульсними сигналами від рослин, фіксують КІЛЬКІСТЮ імпульсів, пропорцюнальною відрізку шляху між рослинами Цей відрізок характеризує відстань між вісями сусідніх рослин вздовж рядка і використовується в гістограмах Порогові рівні КІЛЬКОСТІ імпульсів встановлюють ВІДПОВІДНО до класів гістограми розподілу рослин по шляху машини вздовж рядка за допомогою клавіатури 14 і запам'ятовують в оперативному запам'ятовувальному пристрої мікропроцесора 11 Сигнал, що відповідає класу гістограми, фіксують в наслідок порівняння КІЛЬКОСТІ імпульсів, що характеризують відстань між рослинами з названими пороговими рівнями КІЛЬКОСТІ імпульсів Аналогічно описаному способу контролюють розподіл насіння, розсади та коренебульбоплодів вздовж рядків в процесах управління сівалками, розсадопосадочними, висадкопосадочними та коренезбиральними машинами Прив'язка сигналів від рослин та інших об'єктів до шляху, пройденому машиною, регулювання розмірів каналу контролю співмірно розмірам рослин, шляхом екранування частини електромагніт ного поля та формування імпульсів від об'єктів по екстремумам сигналів розширює технологічні можливості способу контролю протікання технологічного процесу в сільськогосподарських машинах в широкому діапазоні видів, розмірів об'єктів, інтервалів між ними та швидкості руху машин або подачі об'єктів Спосіб може бути використаний для контролю розмірів рослин та розподілу їх в рядках в системах точного дозування ХІМІЧНИХ препаратів на кожну рослину або групу рослин, для контролю розподілу насіння, розсади, висадків та коренебульбоплодів в рядках при управлінні машинами та вирішенні задач моніторингу Зокрема, спосіб може бути використаний в комп'ютерних системах для технологічної наладки таких сільськогосподарських машин, як обприскувачі, сівалки, розсадопосадочні машини, культиватори, збиральні або комбайнові машини в найкращий можливий режим роботи за рахунок автоматичного управління, а також в системах управління технологічними процесами в цілому При використанні на обприскувачах з точним дозуванням ХІМІЧНИХ препаратів на кожну рослину або групу рослин зменшується хімічне забруднення середовища в 3-12 раз Використання способу дозволяє зменшити на 10-40% витрати при виробництві сільськогосподарської продукції ФІГ. 1 42281 Фіг. 2 ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку Обсяг обл -вид арк 2002 р Формат 60x84 1/8 Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Автори англійськоюSakalo Viktor Mykolaiovych
Автори російськоюСакало Виктор Николаевич
МПК / Мітки
Мітки: сільськогосподарських, машинах, спосіб, протікання, процесу, технологічного, контролю
Код посилання
<a href="https://ua.patents.su/4-42281-sposib-kontrolyu-protikannya-tekhnologichnogo-procesu-v-silskogospodarskikh-mashinakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю протікання технологічного процесу в сільськогосподарських машинах</a>
Пристрій для контролю технологічного процесу переробки сирих мулів стічних вод
Номер патенту: 3732
Опубліковано: 27.12.1994
Автор: Красніков Євгеній Аркадійович
МПК: G01N 11/00, C02F 1/30
Мітки: процесу, переробки, технологічного, стічних, пристрій, мулів, контролю, сирих, вод
Формула / Реферат:
Устройство для контроля технологического процесса переработки сырых осадков сточных вод при облучении последних ускоренными электронами, содержащее наклонную рабочую плиту, дозатор осадков, датчик толщины дозируемого слоя и электродвигатель, кинематически связанный с датчиком толщины слоя, отличающееся тем, что, с целью оптимизации процесса переработки путем непрерывной фиксации изменения вязкости перерабатываемой среды, край рабочей плиты...
Спосіб контролю протікання реакції феритоутворення
Номер патенту: 39891
Опубліковано: 16.07.2001
Автор: Радовенчик Вячеслав Михайлович
МПК: G01N 27/26
Мітки: спосіб, феритоутворення, протікання, реакції, контролю
Формула / Реферат:
Спосіб контролю протікання реакції феритоутворення, що включає вимірювання характеристик отримуваної суспензії, який відрізняється тим, що контроль ведуть шляхом вимірювання окисно-відновного потенціалу (Eh).
Спосіб контролю стану електроерозійного процесу різання
Номер патенту: 40075
Опубліковано: 16.07.2001
Автори: Небилиця Юрій Миколайович, Поляков Святослав Петрович, Калєйніков Геннадій Євгенійович
МПК: B23H 1/00
Мітки: спосіб, електроерозійного, процесу, стану, різання, контролю
Формула / Реферат:
Спосіб контролю стану електроерозійного процесу різання, що включає реєстрацію та аналіз сигналів, характеризуючих процес, який відрізняється тим, що в якості сигналу використовують флуктуації енергії, яка виділяється в міжелектродному проміжку.
Спосіб формування перехідних режимів технологічного процесу безперервного лиття
Номер патенту: 24390
Опубліковано: 17.07.1998
Автори: Кипенський Андрій Володимирович, Базакуца Вікторія Вікторовна, Сокол Євген Іванович
МПК: B22D 11/16
Мітки: технологічного, лиття, процесу, спосіб, безперервного, перехідних, режимів, формування
Формула / Реферат:
Способ формирования переходных режимов технологического процесса непрерывного литья, включающий подачу в кристаллизатор жидкого металла через питатели литниковой чаши с начальной угловой скоростью вращениягде d - коэффициент, характеризующий отклонение струи расплава;Rн - наружный радиус заготовки (радиус кристаллизатора);Rв - внутренний радиус заготовки (радиус дорна);g - ускорение свободного...
Спосіб контролю процесу контактного стикового зварювання оплавленням
Номер патенту: 42540
Опубліковано: 15.10.2001
Автори: Чвертко Євгенія Петрівна, Скачков Ігор Олегович
МПК: B23K 11/04
Мітки: процесу, контактного, спосіб, контролю, зварювання, стикового, оплавленням
Формула / Реферат:
Спосіб контролю процесу контактного стикового, зварювання оплавленням, при якому задають програму переміщення рухомого затискача при оплавленні, подають команду на увімкнення осадки, в процесі оплавлення та осадки слідкують за напругою у вторинному контурі машини, який відрізняється тим, що фіксують поточні значення напруги у вторинному контурі машини, обчислюють їх середньоквадратичне відхилення та визначають час, за який середньоквадратичні...
Попередній патент: Пристрій для вимірювання інтенсивності планетарного випромінювання
Наступний патент: Спосіб виготовлення лезових органів сільськогосподарських машин
Випадковий патент: Фунгіцидна і біорегуляторна суміш, спосіб боротьби з фітопатогенними грибами, спосіб регулювання росту рослин, посівний матеріал, фунгіцидний та біорегуляторний засоби