Спосіб регулювання гальмівних сил на колесах транспортного засобу
Номер патенту: 44714
Опубліковано: 12.10.2009
Автори: Єфимчук Валентин Михайлович, Алтухов Петро Миколайович, Арнаут Максим Сергійович
Формула / Реферат
1. Спосіб регулювання гальмівних сил на колесах транспортного засобу, що включає вимірювання за допомогою датчиків заданих параметрів процесу гальмування, обробку сигналів датчиків в блоці керування і зміну гальмівного тиску на задніх колесах за допомогою виконавчого пристрою, який відрізняється тим, що вимірювання заданих параметрів процесу гальмування проводять з формуванням різних по величині сигналів, що надходять від датчиків передніх і задніх коліс, обробку сигналів в блоці керування здійснюють шляхом посилення сигналів датчиків передніх коліс, а зміну гальмівного тиску на задніх колесах за допомогою виконавчого пристрою проводять після досягнення зазначеними сигналами рівних по величині значень і здійснюють до моменту блокування передніх коліс, при цьому як блок керування і виконавчий пристрій використовують мехатронну систему гальмування з променевим регулятором гальмівних сил.
2. Спосіб за пунктом 1, який відрізняється тим, що вимірювання заданих параметрів процесу гальмування здійснюють за допомогою датчиків кутової швидкості, за які використовують параметричні датчики, при цьому для вимірювання кутової швидкості на передніх колесах використовують датчики ємностей, а на задніх колесах використовують індукційні датчики.
Текст
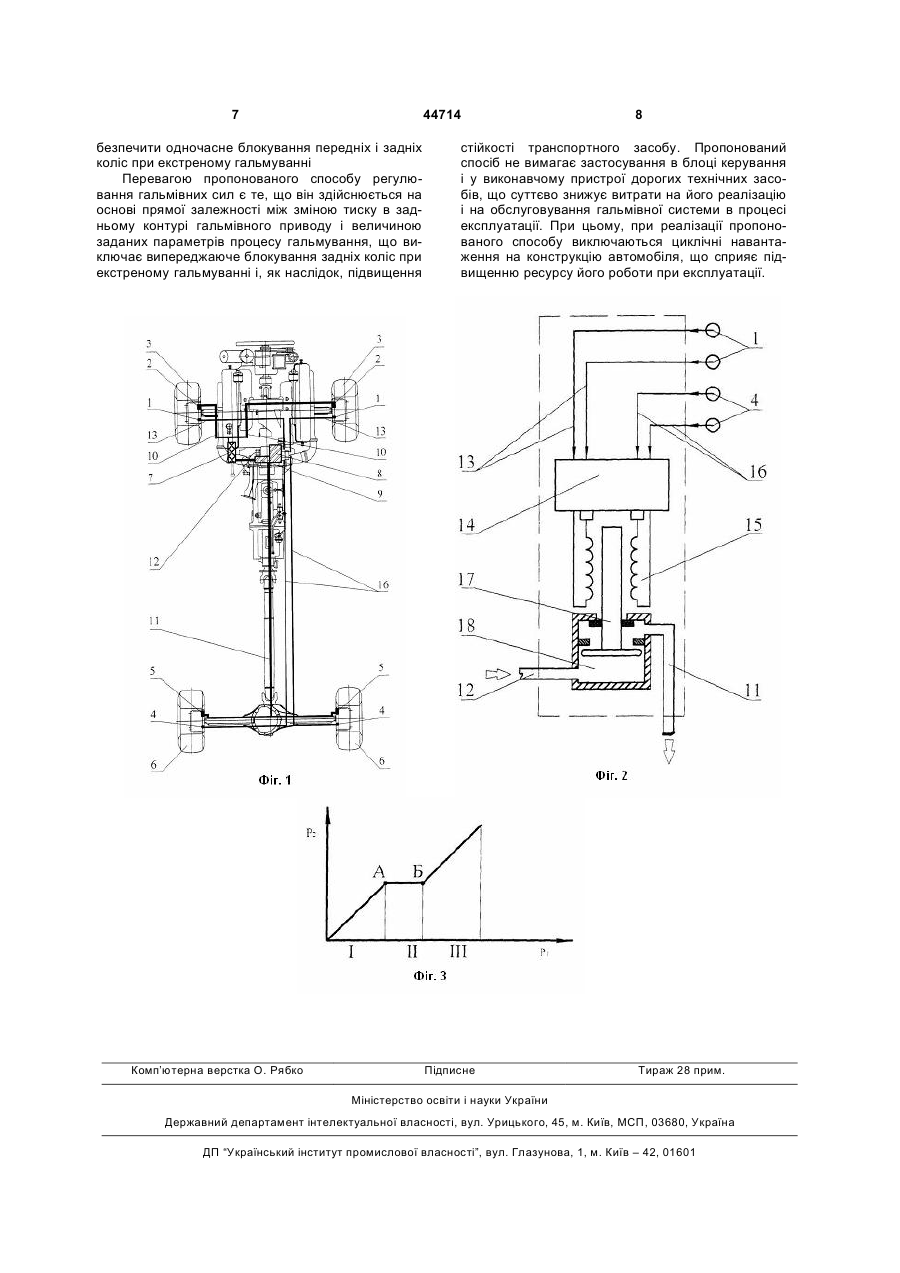
1. Спосіб регулювання гальмівних сил на колесах транспортного засобу, що включає вимірювання за допомогою датчиків заданих параметрів процесу гальмування, обробку сигналів датчиків в блоці керування і зміну гальмівного тиску на задніх колесах за допомогою виконавчого пристрою, який відрізняється тим, що вимірювання заданих параметрів процесу гальмування проводять з формуванням різних по величині сигналів, що надходять від датчиків передніх і задніх коліс, обробку 3 вання управляючий блок продовжує обробляти сигнали, що поступають від першого датчика, і при зміні величини гальмівної сили, викликаної зміною сили зчеплення коліс з дорогою, видає новий командний сигнал на виконавчий пристрій для корекції величини притискного зусилля. Виконавчий пристрій коректує величину притискного зусилля гальмівних колодок так, щоб воно відповідало коефіцієнту порівняння. Якщо в процесі гальмування другим датчиком буде зміряна величина управляючої дії менше порогового значення, зафіксованого раніше в блоці керування, то останній видає командний сигнал виконавчому пристрою на зняття обмеження величини притискного зусилля, після чого його величина стає пропорційній величині управляючої дії. Спосіб застосовується для регулювання гальмівних сил на колесах транспортного засобу при екстреному гальмуванні. Відомий спосіб регулювання гальмівних сил має ряд суттєвих недоліків, що обмежують область його застосування, зокрема: - можливість втрати стійкості автомобіля, обумовлена тим, що спосіб не враховує особливостей перерозподілу гальмівних сил між передніми і задніми колесами в процесі гальмування, внаслідок чого при невеликих значеннях коефіцієнтів зчеплення коліс з дорогою можливо випереджаюче блокування задніх коліс; - нестабільність роботи гальмівної системи в процесі екстреного гальмування, обумовлена тим, що спосіб не враховує ряд експлуатаційних чинників, зв'язаних, зокрема, із зміною дорожніх умов і вагових характеристик автомобілів, зносом гальмівних колодок і т.п., внаслідок чого можливо поява збоїв, помилкових або невчасних команд в блоці керування; - низька надійність способу регулювання гальмівних сил, обумовлена тим, що параметри процесу гальмування прямо не зв'язані з поточною величиною коефіцієнта зчеплення колеса з опорною поверхнею; - виникнення додаткових циклічних навантажень на конструкцію автомобіля, обумовлене тим, що регулювання гальмівних сил на колесах проводиться шляхом миттєвого скидання притискних зусиль колодок; - високі витрати на реалізацію способу і обслуговування в експлуатації гальмівної системи, обумовлені застосуванням складних технічних засобів для вимірювання параметрів процесу гальмування, в блоці керування і у виконавчому пристрої. В сукупності вказані недоліки суттєво знижують ефективність регулювання гальмівних сил при екстреному гальмуванні при одночасно високих витратах на реалізацію способу і зниженні ресурсу його роботи при експлуатації. Відомий спосіб регулювання гальмівних сил на колесах транспортного засобу (патент RU №2088446, В60Т8/32, дата публікації 27.08.1997p.), що включає вимірювання за допомогою датчиків заданих параметрів процесу гальмування, обробку сигналів датчиків в блоці керування і зміну гальмівного тиску на колесах за допомогою виконавчого пристрою. За допомогою датчиків вимірюється швидкість обертання коліс в 44714 4 процесі гальмування. Обробка сигналів датчиків в блоці керування включає операції по обчисленню коефіцієнтів тертя коліс і швидкості автомобіля, покроковому зіставленню величин коефіцієнтів тертя на обох задніх колесах із заданим пороговими значеннями таких коефіцієнтів протягом заданого проміжку часу, при якому одне із задніх коліс може знаходитися в нестабільній фазі по швидкості обертання. Блок керування видає командні сигнали на виконавчий пристрій для зміни гальмівного зусилля на задніх колесах у випадках, при яких величини коефіцієнтів тертя на обох або одному із задніх колесах менше заданих порогових значень цих коефіцієнтів протягом заданого проміжку часу. Виконавчий пристрій індивідуально регулює величини гальмівних зусиль на задніх колесах в процесі гальмування залежно від швидкості колеса з меншим коефіцієнтом тертя. Спосіб застосовується для керування процесом екстреного гальмування транспортного засобу. Відомий спосіб регулювання гальмівних сил має ряд переваг в порівнянні із способоманалогом і дозволяє дещо підвищити ефективність регулювання гальмівних сил при екстреному гальмуванні за рахунок реалізації, в основному, особливостей перерозподілу гальмівних сил між передніми і задніми колесами автомобіля і адаптації гальмівної системи до складних дорожніх умов. Разом з тим відомий спосіб регулювання гальмівних сил має ряд суттєвих недоліків, зокрема: - недовикористання гальмівної ефективності, обумовлене вибором як критерій для регулювання гальмівних сил швидкості обертання задніх коліс з меншими величинами коефіцієнтів тертя, що приводить до збільшення гальмівного шляху при екстреному гальмуванні; - нестабільність роботи гальмівної системи в процесі перехідної стадії екстреного гальмування, обумовлене тим, що спосіб не враховує зниження впливу коефіцієнта тертя коліс на гальмівну ефективність на цій стадії гальмування, знижуючи тим самим ефективність регулювання гальмівних сил; - високі витрати на реалізацію способу і обслуговування в експлуатації гальмівної системи, обумовлені застосуванням складних технічних засобів в блоці керування і виконавчому пристрої. В сукупності вказані недоліки не виключають випереджаючого блокування задніх коліс при екстреному гальмуванні, що приводить до зниження стійкості транспортного засобу, при достатньо високих витратах на реалізацію способу, а також зниженні ресурсу його роботи при експлуатації. В основу корисної моделі поставлена задача створення такого способу регулювання гальмівних сил на колесах транспортного засобу, при якому за рахунок іншого регулювання гальмівного тиску на задніх колесах і застосування інших засобів для його здійснення забезпечується недопущення випереджаючого блокування задніх коліс при екстреному гальмуванні і, як наслідок, підвищення стійкості транспортного засобу. Даний технічний результат досягається при зниженні витрат на реалізацію способу і на обслуговування гальмівної системи в експлуатації, а також підвищенні ресурсу його роботи при експлуатації. 5 Поставлена задача вирішується тим, що в способі регулювання гальмівних сил на колесах транспортного засобу, що включає вимірювання за допомогою датчиків заданих параметрів процесу гальмування, обробку сигналів датчиків в блоці керування і зміну гальмівного тиску на задніх колесах за допомогою виконавчого пристрою, згідно корисної моделі вимірювання заданих параметрів процесу гальмування проводять з формуванням різних по величині сигналів, що надходять від датчиків передніх і задніх коліс, обробку сигналів в блоці керування здійснюють шляхом посилення сигналів датчиків передніх коліс, а зміну гальмівного тиску на задніх колесах за допомогою виконавчого пристрою проводять після досягнення зазначеними сигналами рівних по величині значень і здійснюють до моменту блокування передніх коліс, при цьому як блок керування і виконавчий пристрій використовують мехатронну систему гальмування з променевим регулятором гальмівних сил. Для зниження вартості реалізації способу вимірювання заданих параметрів процесу гальмування здійснюють за допомогою датчиків кутової швидкості, у якості яких використовують параметричні датчики, при цьому для вимірювання кутової швидкості на передніх колесах використовують датчики ємностей, а на задніх колесах використовують індукційні датчики. На основі способу, що заявляється, може бути створена достатньо проста система регулювання гальмівних сил на легкових автомобілях з роздільними переднім і заднім контурами гальмівного приводу, наприклад, моделі ВАЗ-2107, що забезпечує виконання вимог Правил ЕЕК ООН №13. Сутність способу регулювання гальмівних сил, що заявляється, пояснюється представленими фігурами креслення: на Фіг.1 - структурна схема способу; на Фіг.2 - блок-схема способу; на Фіг.3 якісна залежність зміни тиску Р1 і Р2 в передньому і задньому контурах гальмівного приводу. Система гальмування (Фіг.1) вмонтовується на базі гальмівної системи легкового автомобіля з роздільними переднім і заднім контурами гальмівного приводу і містить датчики ємностей кутової швидкості 1 і робочі гальмівні циліндри 2, розташовані на передніх колесах 3, індукційні датчики кутової швидкості 4 і робочі гальмівні циліндри 5, розташовані на задніх колесах 6, головний гальмівний циліндр 7 і мехатронний блок керування 8, суміщений з променевим регулятором гальмівних сил 9, розташовані під капотом (не показаний) автомобіля. Передній контур гальмівного приводу складається з робочих гальмівних циліндрів 2, зв'язаних з головним гальмівним циліндром 7 за допомогою гальмівної магістралі 10. Задній контур гальмівного приводу складається з робочих гальмівних циліндрів 5, зв'язаних з головним гальмівним циліндром 7 за допомогою гальмівної магістралі 11, променевого регулятора гальмівних сил 9 і патрубка 12. Виходи датчиків ємностей 1 з'єднані (Фіг.2) електричним колом 13 з входами електричного трансформатора 14, розташованого в мехатронному блоці керування 8, виходи якого, у свою чер 44714 6 гу, з'єднані з катушкою 15 електромагніту, розташованого в променевому регуляторі гальмівних сил 9. Із зазначеною катушкою 15 через мехатронний блок керування 8 електричним колом 16 з'єднані також виходи індукційних датчиків 4. Сердечник електромагніту виконаний у вигляді штока 17 поршня в гідравлічному циліндрі 18 променевого регулятора гальмівних сил 9, за допомогою якого здійснюється регулювання тиску в задньому контурі гальмівного приводу. Для збільшення сили струму вихідного сигналу індукційні датчики 4, розташовані на задніх колесах 6, можуть бути додатково з'єднані з трансформатором струму (не показаний). Параметри датчиків 1 і 4, а також електромеханічні властивості мехатронного блоку керування 8 і променевого регулятора гальмівних сил 9 вибираються з урахуванням недопущення випереджаючого блокування задніх коліс в процесі екстреного гальмування. Спосіб регулювання гальмівних сил здійснюють таким чином. В режимі екстреного гальмування автомобіля водій впливає на педаль гальма з максимальним зусиллям, що викликає відповідний тиск робочого середовища в головному гальмівному циліндрі 7, який через гальмівну магістраль 10 передається в робочі гальмівні циліндри 2 передніх коліс 3. Одночасно за допомогою датчиків 1 і 4 проводиться формування різних по величині сигналів, відповідних фактичним значенням кутової швидкості на передніх 3 і задніх 6 колесах. Вихідні сигнали датчиків ємностей 1 по електричному колу 13 поступають на електричний трансформатор 14 в мехатронний блок керування 8 і після їх посилення подаються на катушку 15 електромагніту променевого регулятора гальмівних сил 9. По електричному колу 16 через мехатронний блок керування 8 на цю ж катушку 15 електромагніту поступають вихідні сигнали від індукційних датчиків 4 задніх коліс 6. На початковому етапі екстреного гальмування (ділянка І на Фіг.3), при якому сила струму сигналів індукційних датчиків 4 дещо вища сили струму посилених сигналів датчиків ємностей 1, променевий регулятор гальмівних сил 9 забезпечує пропорційне збільшення гальмівного тиску в передньому і задньому контурах гальмівного приводу. В момент, передуючий блокуванню передніх коліс (крапка А на Фіг.3), вихідні сигнали датчиків ємностей 1, посилені електричним трансформатором 14 в мехатронному блоці керування 8, на котушці 15 електромагніту досягають рівності по величині сили струму з сигналами індукційних датчиків 4. В цьому положенні штока 17 поршня в гідравлічному циліндрі 18 підвищення тиску в задньому контурі гальмівного приводу припиняється (ділянка II на Фіг.3), що запобігає випереджаючому блокуванню задніх коліс до моменту блокування передніх коліс. Після блокування передніх коліс (крапка Б на Фіг.3) променевий регулятор гальмівних сил 9 знов починає збільшувати тиск в задньому контурі до повного блокування задніх коліс (ділянка III на Фіг.3). Таким чином, запізнювання і подальше пропорційне наростання тиску в задньому контурі гальмівного приводу дозволяє за 7 44714 безпечити одночасне блокування передніх і задніх коліс при екстреному гальмуванні Перевагою пропонованого способу регулювання гальмівних сил є те, що він здійснюється на основі прямої залежності між зміною тиску в задньому контурі гальмівного приводу і величиною заданих параметрів процесу гальмування, що виключає випереджаюче блокування задніх коліс при екстреному гальмуванні і, як наслідок, підвищення Комп’ютерна верстка О. Рябко 8 стійкості транспортного засобу. Пропонований спосіб не вимагає застосування в блоці керування і у виконавчому пристрої дорогих технічних засобів, що суттєво знижує витрати на його реалізацію і на обслуговування гальмівної системи в процесі експлуатації. При цьому, при реалізації пропонованого способу виключаються циклічні навантаження на конструкцію автомобіля, що сприяє підвищенню ресурсу його роботи при експлуатації. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adjustment of brake forces on wheels of transport vehicle
Автори англійськоюAltukhov Petro Mykolaiovych, Arnaut Maksym Serhiiovych, Yefymchuk Valentyn Mykhailovych
Назва патенту російськоюСпособ регулирования тормозных сил на колесах транспортного средства
Автори російськоюАлтухов Петр Николаевич, Арнаут Максим Сергеевич, Ефимчук Валентин Михайлович
МПК / Мітки
МПК: B60T 8/00
Мітки: регулювання, гальмівних, спосіб, колесах, засобу, транспортного, сіль
Код посилання
<a href="https://ua.patents.su/4-44714-sposib-regulyuvannya-galmivnikh-sil-na-kolesakh-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання гальмівних сил на колесах транспортного засобу</a>
Полігон для випробувань гальмівних якостей транспортного засобу
Номер патенту: 28518
Опубліковано: 10.12.2007
Автори: Митрофанов Олександр Петрович, Бондарев Євген Ілліч
МПК: G01M 15/02
Мітки: гальмівних, полігон, якостей, засобу, випробувань, транспортного
Формула / Реферат:
1. Полігон для випробуваньгальмівних якостей транспортного засобу, який складається з рівної площадки з твердим покриттям, на початку якої встановлений стенд для пробігових випробувань з переднім і заднім барабанами, які встановлені один за одним в одній горизонтальній площині та в двох паралельних вертикальних площинах, барабани з обох сторін мають цапфи, котрі встановлені з можливістю безперешкодного обертання у підшипниках, закріплених в...
Регулятор гальмівних важільних передач залізничного транспортного засобу
Номер патенту: 64760
Опубліковано: 15.03.2004
Автори: Агапкін Валєрій Алєксєєвіч, Сіпягін Євгєній Сєргєєвіч, Тужилкін Іван Івановіч, Марочкін Євгєній Сємьоновіч
МПК: B61H 15/00
Мітки: залізничного, транспортного, передач, важільних, засобу, регулятор, гальмівних
Формула / Реферат:
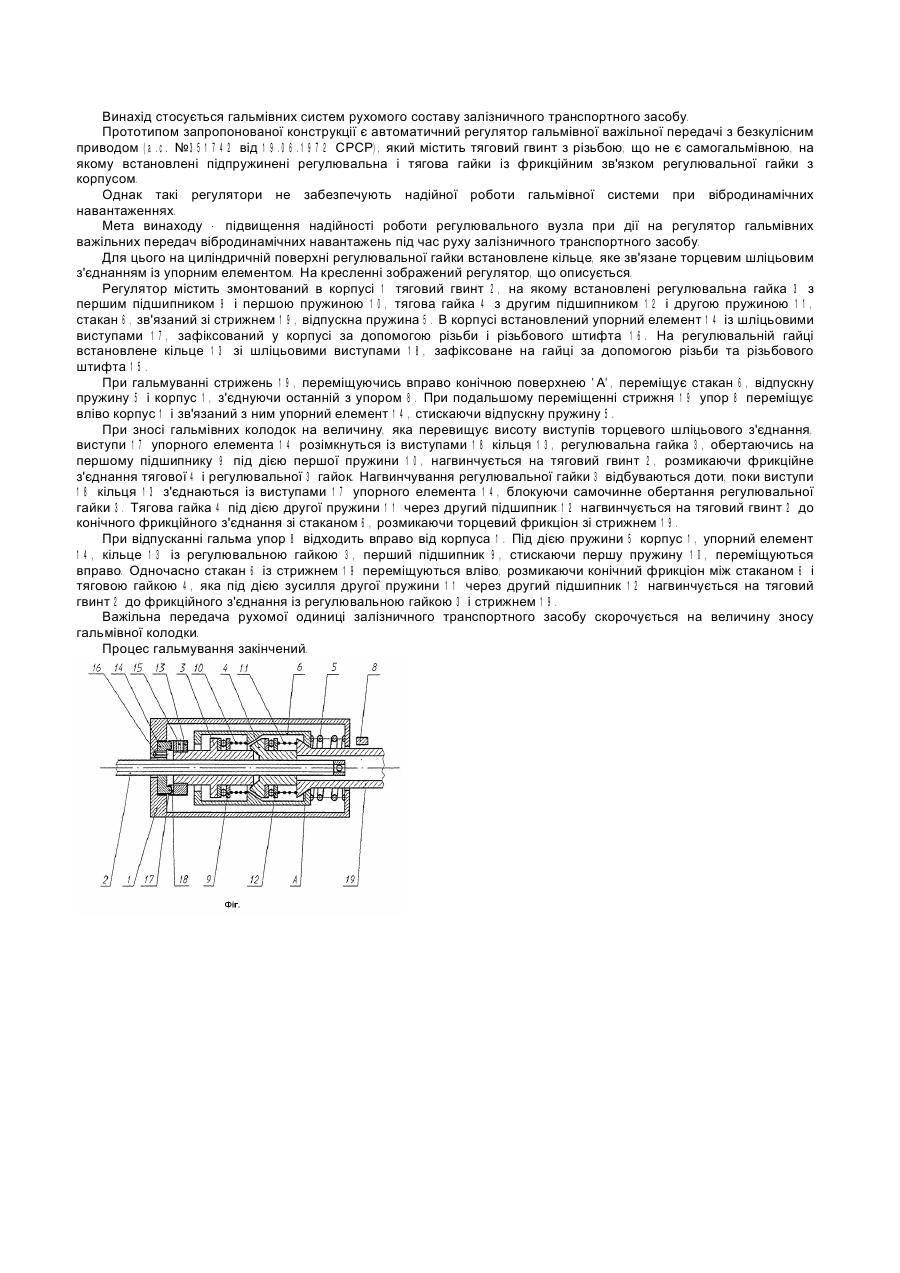
Регулятор гальмівних важільних передач залізничного транспортного засобу, що містить корпус, в якому розміщений тяговий гвинт із різьбою, що не є самогальмівною, на якому встановлені підпружинені регулювальна і тягова гайки, який відрізняється тим, що на регулювальній гайці встановлено кільце, зафіксоване від осьового переміщення на гайці за допомогою різьби і різьбового штифта, у корпусі встановлений упорний елемент, зафіксований від...
Спосіб регулювання гальмових сил транспортного засобу
Номер патенту: 13174
Опубліковано: 28.02.1997
Автори: Бадалов Гєоргій Парсамовіч, Восковец Сергій Валентинович, Папашев Олег Харуллович, Подригало Михайло Абович, Федосов Олександр Сергійович
МПК: B60T 8/26
Мітки: засобу, сіль, регулювання, спосіб, гальмових, транспортного
Формула / Реферат:
(57) Способ регулирования тормозных сил транспортного средства, заключающийся в ограничении и последующем скачкообразном увеличении темпа нарастания тормозных сил на задних колесах, отличающийся тем, что в начальный момент торможения создают равный темп нарастания тормозных сил на передних и задних колесах и при достижении суммарной тормозной силой величины, составляющей 10-20% от общего веса транспортного средства, ограничивают тормозную...
Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Лавріненко Олександр Сергійович, Богатиренко Костянтин Іванович, Тимофєєв Віталій Сергійович
МПК: B60T 8/88
Мітки: курсовою, засобу, гальмуванням, спосіб, підвищеною, керування, антиблокувального, транспортного, стійкістю
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім...
Пристрій і спосіб для регулювання тиску в шинах транспортного засобу
Номер патенту: 45501
Опубліковано: 15.04.2002
Автор: Кіс Янос
МПК: B60C 23/00
Мітки: транспортного, спосіб, тиску, пристрій, засобу, шинах, регулювання
Формула / Реферат:
1. Пристрій для регулювання тиску щонайменше в одній шині (12, 13) транспортного засобу, що включає пневматичний блок управління (22), датчик тиску (44), що обертається, прохідний з'єднувач (26), приєднаний щонайменше до однієї з шин (12, 13) і обертається разом із шиною (12, 13), регульований колісний вентильний пристрій (28) шин (12, 13), який може займати різні положення, причому пристрій (10) сполучений з джерелом стислого повітря (20), а...
Попередній патент: Спосіб лікування хворих на хронічний коліт на тлі остеохондрозу хребта
Наступний патент: Спосіб ідентифікації особи по черепу та фотопортрету
Випадковий патент: Спосіб відновлення цілісності порожнистих органів у невідкладній гастроентерологічній хірургії