Регулюючий мікропроцесорний контролер
Номер патенту: 44799
Опубліковано: 12.10.2009
Автори: Бунке Олександр Сергійович, Голінко Ігор Михайлович, Ковриго Юрій Михайлович, Коновалов Михайло Андрійович
Формула / Реферат
Регулюючий мікропроцесорний контролер, що містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтно-імпульсний модулятор, який відрізняється тим, що цифровий обчислювальний пристрій містить перший швидкодіючий канал керування; функціональна структура (ФС1) якого реалізує функцію:
![]() ,
,
де К1, К2, К3 - пропорційна, інтегральна та диференціальна частини налагодження ПІД-регулятора,
Т - час квантування,
z - символ дискретного перетворення;
другий інерційний канал керування, функціональна структура (ФС2) якого реалізує функцію:
![]() ,
,
де К4 - пропорційна частина П-регулятора,
z - символ дискретного перетворення,
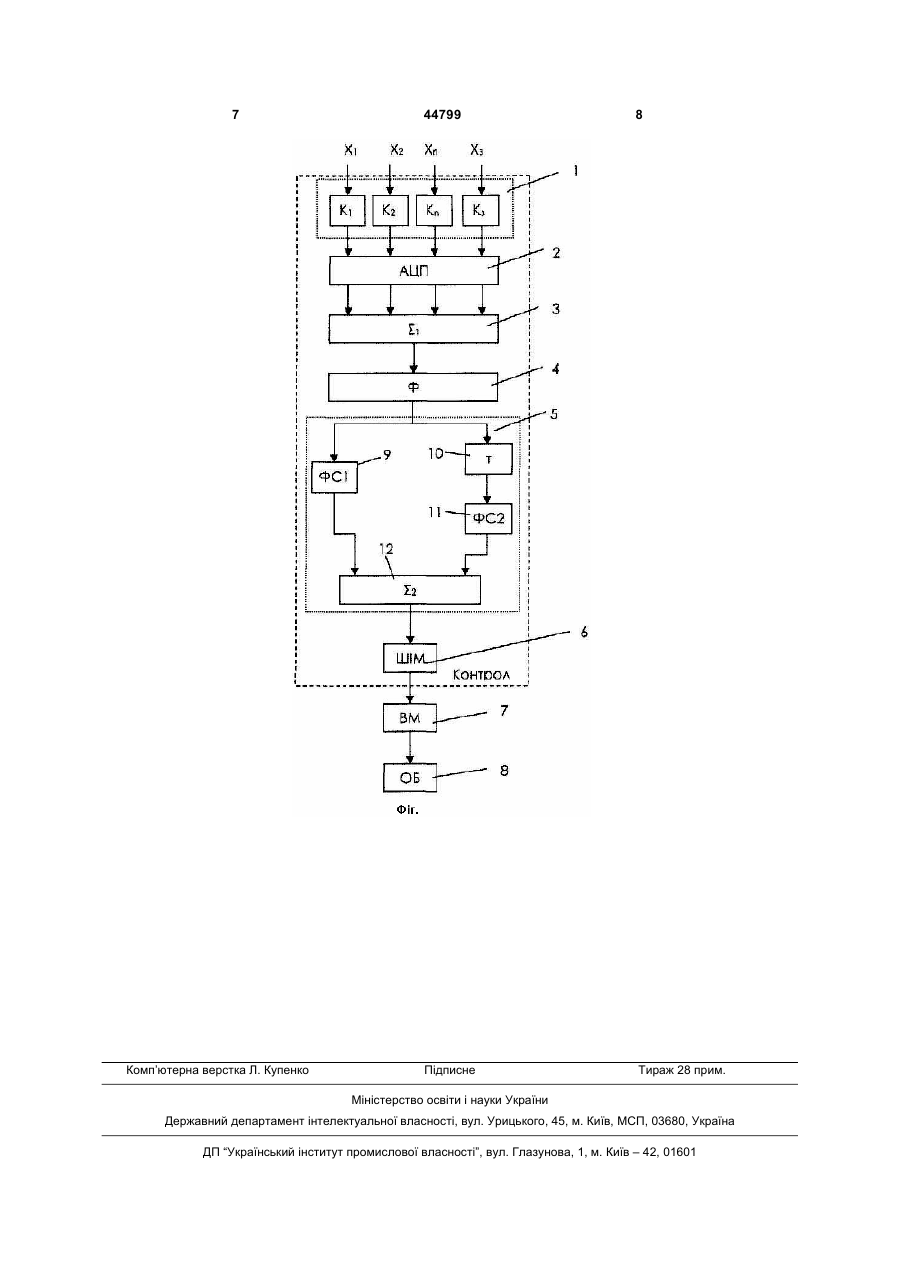
n - параметр, що характеризує дискретний час запізнення; причому входи ФС1 першого каналу та блока запізнення другого каналу підключені до виходу фільтра, а виходи їх відповідно підключені до першого входу другого суматора та входу ФС2 другого каналу, вихід якого підключено до другого входу другого суматора, вихід якого підключено до входу широтно-імпульсного модулятора.
Текст
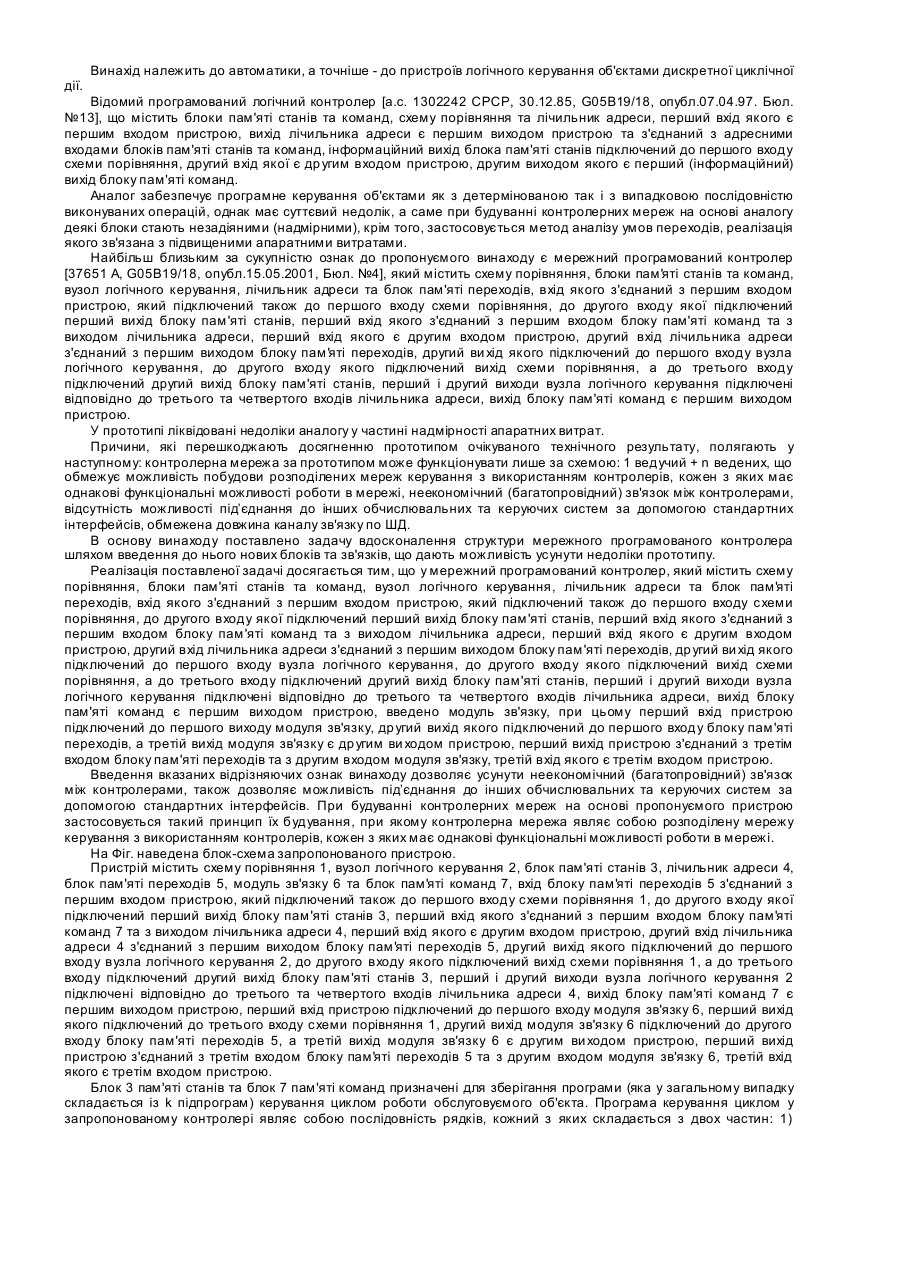
Регулюючий мікропроцесорний контролер, що містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтноімпульсний модулятор, який відрізняється тим, що цифровий обчислювальний пристрій містить перший швидкодіючий канал керування, функціональна структура (ФС1) якого реалізує функцію: 2 3 ристаних у регуляторах «МИНИТЕРМ» не містить функціональних елементів, забезпечуючих стабілізуючий ефект перехідного процесу. Задовольнити обом вимогам, щоб одночасно забезпечити високу якість перехідних процесів при збереженні гарантованої стійкості в одноканальній функціональній структурі сформованих законів керування практично неможливо. Також відомо, що у будь-яких систем регулювання існує декілька важливих показників, що характеризують ступінь їх досконалості: швидкодія регулятора та запас стійкості системи керування. Перевага надається тим системам, де між цими показниками не існує «технічного протиріччя», яке полягає у тому, що збільшення швидкодії регулятора зменшує його запас стійкості. Технічне протиріччя, що властиве регуляторам «МИНИТЕРМ», знижує ефективність їх використання на складних теплоенергетичних об'єктах (τ>>0, Т>>0). Тому відомі регулятори «МИНИТЕРМ», мало придатні для якісного регулювання параметрів інерційних об'єктів. В основу корисної моделі поставлена задача усунути вказані недоліки, вирішити проблему технічного протиріччя та удосконалити функціональну структуру управління відомих регуляторів шляхом введення двоканальної структури управління виконавчим механізмом, що забезпечує підвищення швидкодії системи при збереженні її стійкості. Поставлена задача вирішується тим, що в регулюючому мікроконтролері, який містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтно-імпульсний модулятор новим є те, що цифровий обчислювальний пристрій містить перший швидкодіючий канал управління функціональна структура (ФС1) якого реалізує функцію: z −1 Tz + K3 Wp (z ) = K 1 + K 2 Tz , z −1 де К1, К2, К3 - пропорційна, інтегральна та диференціальна частини налагодження ПІДрегулятора, Т - час квантування, z - символ дискретного перетворення; другий інерційний канал управління функціональна структура (ФС2) якого реалізує функцію: Wp(z)=K4z-n, де К4 - пропорційна частина П-регулятора, z - символ дискретного перетворення, n - параметр, що характеризує дискретний час запізнення; причому входи ФС1 першого каналу та блоку запізнення другого каналу підключені до виходу фільтра, а виходи їх відповідно підключені до першого входу другого суматора (Σ2) та входу ФС2 другого каналу, вихід якого підключено до другого входу другого суматора, вихід якого підключено до входу широтно-імпульсного модулятора. На Фіг. представлена функціональна структурна схема мікропроцесорного контролера. 44799 4 Контролер містить апаратний пристрій вводу інформації 1 від аналогових вхідних сигналів. Вхідні сигнали Х1, Х1, Х3...Хn перетворюються аналого-цифровим перетворювачем 2 у їх цифрові еквіваленти. Перший суматор 3 (Σ1) вираховує суму вхідних сигналів з урахуванням їх масштабних коефіцієнтів Кх, після чого вираховує загальну неузгодженість є, що потім оброблюється фільтром 4. Цифровий обчислювальний пристрій 5 містить мікро-ЕОМ, оперативний та постійний запам'ятовуючий пристрої, бібліотеку функціональних блоків, достатню для того, щоб вирішувати відносно складні задачі автоматичного регулювання, а також елементи для передачі та обробки інформації (на кресленні не показано). Цифровий обчислювальний пристрій 5 реалізую перший швидкодіючий канал управління, що містить функціональну структуру 9 (ФС1), другий інерційний канал управління, що містить блок запізнення 10 та функціональну структуру 11 (ФС2) і вихідні сигнали яких подаються на другий суматор 12 (Σ2). Вихідний сигнал цифрового обчислювального пристрою поступає на широтно-імпульсний модулятор 6, який здійснює керування виконавчим механізмом 7, що діє на об'єкт керування 8. Формування імпульсних сигналів на виході контролера виконується за допомогою цифрового обчислювального пристрою і широтно-імпульсного модулятору. Ці сигнали поступають на виконавчий механізм через дискретні виходи контролера. За допомогою апаратури оперативного керування можна налаштовувати параметри контролеру та контролювати сигнали у проміжних внутрішніх точках його структури. Регулюючий мікропроцесорний контролер працює наступним чином. Вхідні сигнали Х1, Х2, ... Хn, Хзд, що поступають на пристрій вводу інформації 1 перетворюються аналого-цифровим перетворювачем 2 в їх цифрові еквіваленти. При відхиленні регульованого параметру Хn від заданого значення Хзд - на виході суматора 3 з'являється сигнал неузгодження ε. Оброблений фільтром 4, сигнал неузгодження надходить у цифровий обчислювальний пристрій, в якому сформована функціональна структура двох незалежних каналів керування: швидкодіючого та інерційного. При величині сигналу неузгодження ε, що перевищує порогове значення чутливості, контролер починає вираховувати керуючий сигнал. Першим вступає в роботу швидкодіючий ФС1-канал, що формує сигнал керування у відповідності до закону регулювання. Вихідний сигнал швидкодіючого каналу, перетворений ШІМ, надходить на виконавчий механізм, що переміщує регулюючий орган на величину, достатню для компенсації відхилення регулюємого параметра. Вихідний сигнал другого ФС2-каналу призначений для обмеження дії на регулюючий орган, «гальмування» на заключному етапі перехідного процесу, після того, як вже виконано регулюючий вплив, достатній для повної компенсації величини відхилення параметру, що регулюється. Це допомагає уникнути перерегулювання на інерційних 5 об'єктах з запізненням, що викликається першим (швидкодіючим) ФС1-каналом керування та збільшує запас стійкості замкненої системи регулювання. Розподілення у часі взаємодії каналів керування виконавчим механізмом, та розподілені параметри налаштування кожного каналу дозволяють забезпечити оптимальну швидкодію контролера в початковій фазі перехідного процесу, і, таким чином отримати мінімальне відхилення параметру, що регулюється, від заданого значення, а також зберегти стійкість системи на заключному етапі перехідного процесу, своєчасно обмеживши переміщення регулюючого органу. В приведеному описі функціональна структура контролера, що пропонується, по складу апаратних пристроїв не відрізняється від багатьох відомих мікропроцесорних контролерів, у тому числі й прийнятих за найближчий аналог, регуляторів «МИНИТЕРМ» (ОАО «МЗТА»). Відмінність полягає у функціональній структурі способу формування сигналу керування виконавчим механізмом. Удосконалення контролера з метою забезпечити його оптимальну швидкодію при збереженні стійкості системи, є можливим тільки шляхом зміни функціональної структури керування, що дає можливість сформувати нові, більш якісні режими керування виконавчим механізмом. Функціональна структура ФС1 першою вступає в роботу і реалізує швидкісний режим керування виконавчим механізмом. Формування ПІД-закону та швидкодія регулятора забезпечується параметрами налаштування першого каналу (К1, К2, К3). Друга (додаткова) функціональна структура ФС2 також містить набір стандартних модулів, що містяться в бібліотеці функціональних блоків і реалізує системну функцію. На відміну від першої, друга функціональна структура підключається в систему регулювання не одразу, а після часу запізнення. Друга функціональна структура реалізує інерційний режим керування виконавчим механізмом і забезпечує стійкість процесу на заключному етапі шляхом додаткового обмеження швидкості переміщення регулюючого органу. Запас стійкості системи забезпечується параметрами налаштування другого каналу (К4, n). За допомогою двох незалежних каналів, в кожному з яких наявні свої індивідуальні параметри налаштування, з'явилася можливість усунути недоліки відомих одноканальних контролерів, шля 44799 6 хом структурного розділення у часі задач швидкодії та стійкості. Технічна реалізація двоканальної функціональної структури керування виконавчим механізмом дозволить вирішити протиріччя між швидкодією та стійкістю замкненої системи регулювання, на відміну від одноканальної структури керування, де налаштування системи є компромісом між швидкодією та стійкістю. Компроміс - це лише незначне покращення одного з показників перехідного процесу за рахунок погіршення іншого показника, що не є прийнятним для об'єктів з високими вимогами до якості перехідного процесу. Двоканальна структура дозволяє розділити одну недостатньо гнучку функціональну структуру на дві відносно самостійні гілки ФС1 та ФС2, що формують у визначеній послідовності свої складові керуючого впливу на виконавчий механізм. Така побудова функціональної структури керування мікропроцесорних контролерів забезпечить їх універсальну ефективність для широкого спектру інерційних теплоенергетичних об'єктів. Таким чином, суть корисної моделі полягає в тому, що у запропонованому мікропроцесорному контролері цифровий обчислювальний пристрій реалізує двоканальну функціональну структуру керування виконавчим механізмом по принципу розділення однієї недостатньо гнучкої структури керування, що використовується у відомих контролерах, на дві відносно незалежні гілки, кожна з яких вирішує свою окрему логічно завершену задачу по швидкодії та стійкості системи. Удосконалення лише конструкції (нова форма), без одночасного удосконалення функціональної структури керування мікропроцесорних контролерів (нова суть), є значною, але недостатньою умовою для підвищення ефективності систем автоматичного регулювання, які використовуються для автоматизації інерційних теплоенергетичних об'єктів з несприятливими динамічними характеристиками (τоб>>0, Тоб>>0). Новий рівень техніки запропонованої корисної моделі полягає в удосконалені функціональної структури мікропроцесорного контролеру. Регулюючий мікропроцесорний контролер зменшує динамічну помилку регулювання на 2025%, а також забезпечує гарантовану стійкість системи при зміні динамічних характеристик об'єкту регулювання у 1,5-2 рази. 7 Комп’ютерна верстка Л. Купенко 44799 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl microprocessor controller
Автори англійськоюKovryho Yurii Mykhailovych, Konovalov Mykhailo Andriiovych, Holinko Ihor Mykhailovych, Bunke Oleksandr Serhiiovych
Назва патенту російськоюРегулирующий микропроцессорный контроллер
Автори російськоюКовриго Юрий Михайлович, Коновалов Михаил Андреевич, Голинко Игорь Михайлович, Бунке Александр Сергеевич
МПК / Мітки
МПК: G05B 11/00
Мітки: контролер, регулюючий, мікропроцесорний
Код посилання
<a href="https://ua.patents.su/4-44799-regulyuyuchijj-mikroprocesornijj-kontroler.html" target="_blank" rel="follow" title="База патентів України">Регулюючий мікропроцесорний контролер</a>
Контролер аналого-цифрової системи

Номер патенту: 34886
Опубліковано: 26.08.2008
Автор: Крупінов Юрій Олександрович
МПК: G01S 7/280
Мітки: аналого-цифрової, системі, контролер
Формула / Реферат:
Контролер аналого-цифрової системи, що містить аналого-цифровий перетворювач, на перший вхід якого надходить аналоговий сигнал, а другий вхід з'єднаний із першим виходом блока керування, на вхід якого надходить імпульс початкової установки, а четвертий вихід з'єднаний із другим входом блока обчислювання, який відрізняється тим, що в нього додатково введені перший та другий комутатори, генератор тестової послідовності, регістр зсуву зі...
Мережний програмований контролер
Номер патенту: 79363
Опубліковано: 11.06.2007
Автори: Фурман Ілля Олександрович, Радченко Станіслав Станіславович
МПК: G05B 19/04, G05B 19/05, G05B 19/18
Мітки: мережний, програмований, контролер
Формула / Реферат:
Мережний програмований контролер, який містить схему порівняння, блоки пам'яті станів та команд, вузол логічного керування, лічильник адреси та блок пам'яті переходів, перший вхід якого з'єднаний з першим входом контролера, який підключений також до першого входу схеми порівняння, до другого входу якої підключений перший вихід блока пам'яті станів, перший вхід якого з'єднаний з першим входом блока пам'яті команд та з виходом лічильника...
Програмований логічний контролер
Номер патенту: 71200
Опубліковано: 15.05.2006
Автори: Бовчалюк Станіслав Ярославович, Фурман Ілля Олександрович, Малиновський Михайло Леонідович
МПК: G06F 9/00, G05B 19/05
Мітки: контролер, логічний, програмований
Формула / Реферат:
Ствол газового пістолета, виконаний з набійником і має на зовнішній поверхні поперечну канавку проти початку спрямовувальної частини каналу ствола, який відрізняється тим, що виконаний з дульним розширенням і містить на внутрішній поверхні спрямовувальної частини каналу ствола розсікаючі вставки зрізаної пірамідальної форми, основа яких витягнута вздовж вісі каналу ствола, при цьому вершини пірамідальних вставок направлені одна до другої і...
Програмований логічний контролер
Номер патенту: 39306
Опубліковано: 15.10.2002
Автори: Малиновський Михаїл Леонідович, Фурман Ілля Олександрович, Загарій Генадій Іванович
МПК: G06F 9/22, G05B 19/18
Мітки: програмований, логічний, контролер
Формула / Реферат:
Програмований логічний контролер, що містить блоки пам'яті станів та команд, лічильник адреси, схему порівняння та блок індикації, причому перший (встановлювальний) вхід лічильника адреси є першим входом пристрою, інформаційний вихід лічильника адреси підключений до адресних входів блоків пам'яті станів та команд, а також до першого входу блока індикації, другий вхід якого з'єднаний з першим виходом схеми порівняння, перший вхід якої...
Програмований логічний контролер
Номер патенту: 82759
Опубліковано: 12.05.2008
Автори: Малиновський Михайло Леонідович, Кулик Петро Дем'янович, Фурман Ілля Олександрович, Філіппович Валерій Петрович
МПК: G05B 19/18
Мітки: контролер, програмований, логічний
Формула / Реферат:
Програмований логічний контролер, що містить блок індикації, блок аналізу ситуацій і блок пам'яті команд, причому перший вихід блока аналізу ситуацій підключений до входу блока індикації, який відрізняється тим, що в нього введений блок пам'яті поточних станів, перетворювач форми вхідних сигналів, перетворювач форми вихідних сигналів, вихід якого є виходом пристрою, перший вхід пристрою підключений до перетворювача форми вхідних сигналів,...
Попередній патент: Полива
Наступний патент: Підводний світловий прилад
Випадковий патент: Спосіб лікування генералізованого пародонтиту у пацієнтів із хронічною хламідійною інфекцією