Система керування нестаціонарним нелінійним об’єктом
Номер патенту: 45234
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Тарасова Аліна Сергіївна, Дибська Ирина Юріївна
Формула / Реферат
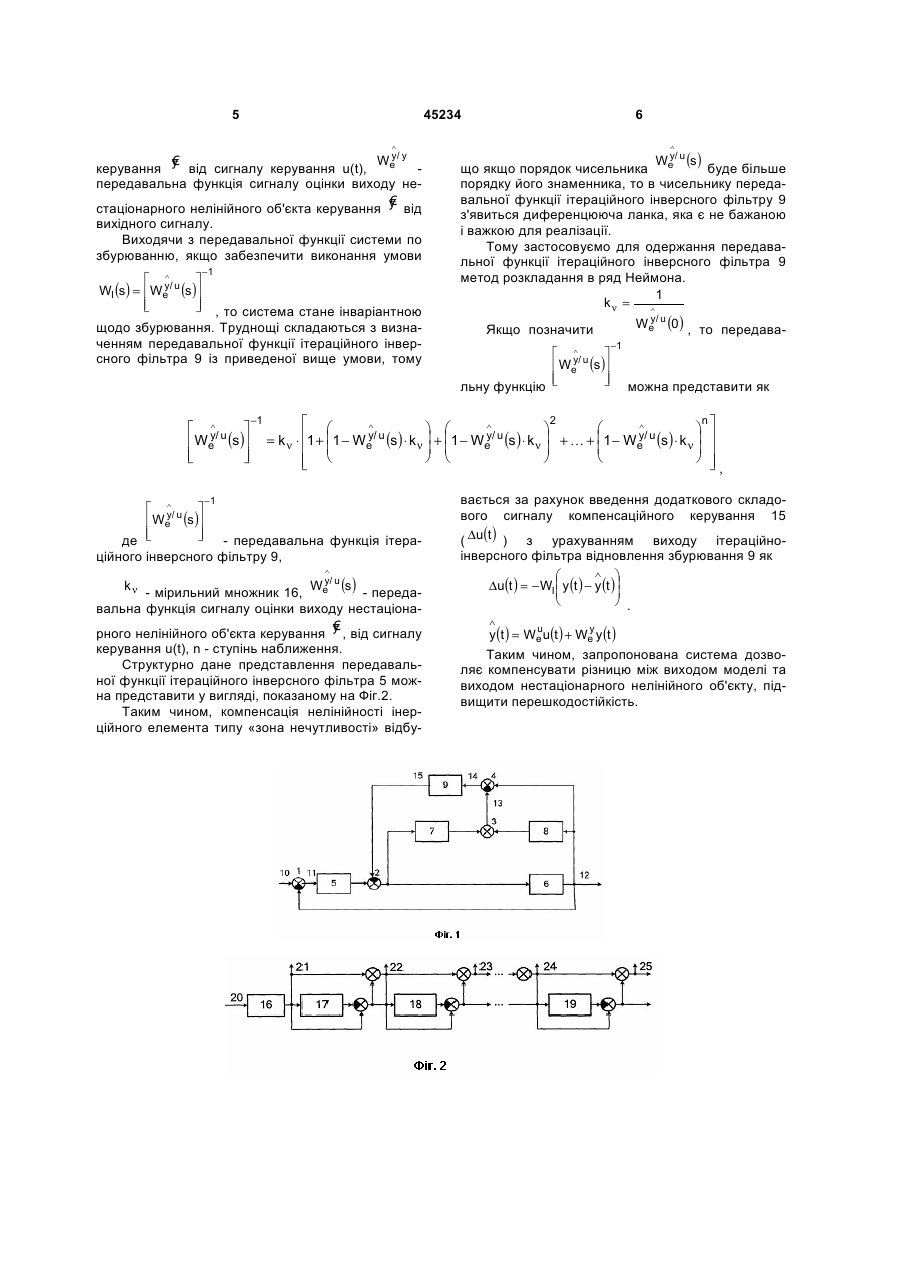
Система керування нестаціонарним нелінійним об'єктом, що містить два суматори, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вихід якого сполучений з першим входом третього суматора, другий вхід якого з'єднаний з виходом спостерігача стану вихідного параметра об'єкта керування, причому вихід третього суматора та вихід нестаціонарного нелінійного об'єкта сполучені з четвертим суматором, вихід якого через ітераційний інверсний фільтр підключений до другого входу другого суматора, вихід якого підключений до входів спостерігача стану по керуванню та нестаціонарного нелінійного об'єкта, при цьому до першого входу другого суматора підключений вихід регулятора, вихід з першого суматора сполучений з входом регулятора, до першого входу першого суматора підключений задавальний вплив, а до другого входу першого суматора підключений вихід нестаціонарного нелінійного об'єкта.
Текст
Система керування нестаціонарним нелінійним об'єктом, що містить два суматори, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вихід якого сполучений з першим входом третього суматора, другий вхід якого з'єднаний з виходом спостерігача стану вихідного па 3 45234 ∧ збурювання 15 ( ν ) . До ітераційного інверсного фільтру входять: 1 (k ν = ) ∧ y We / u (0 ) , нелінійні мірильний множник 16 фільтра 17-19 з передавальними функціями ∧ y We / u ⋅ k ν , помилка вихідного сигналу 20 (∆y ) , 1ше наближення сигналу оцінки збурювання 21 ∧ ( ν1) , 2-ге наближення сигналу оцінки збурювання ∧ 22 ( ν 2 ) , 3-тє наближення сигналу оцінки збурю∧ вання 23 ( ν 3 ) , n-1-ше наближення сигналу оцінки ∧ збурювання 24 (νn−1) , n-не наближення сигналу ∧ оцінки збурювання 25 ( νn ) . Система керування нестаціонарним нелінійним об'єктом працює таким чином. Формується додатково сигнал компенсаційного керування 15( ∆ u(t)) з урахуванням виходу ітераційного інверсного фільтру відновлення збурювання 9 як ∧ ⎞ ⎛ ∆u(t ) = − WI ⎜ y (t ) − y (t )⎟ ⎜ ⎟ ⎝ ⎠ , W ( s) де I - передавальна функція ітераційного ∧ інверсного фільтру 9, y - вихідний сигнал 12, y (t ) - оцінка виходу нестаціонарного нелінійного об'єкту 13, отримана на основі спостерігача стану по управлінню 7 і спостерігача стану вихідного параметра об'єкта керування 8 виду ∧ u y y(t ) = We u(t ) + We y(t ) , у якому позначені u We (s) = C(sI − A + LC)−1Bu + Du y We (s) = C(sI − A + LC)−1L , , A - матриця стану нестаціонарного неліде нійного об'єкту, B - матриця керування, C - матриця виміру, D - матриця обходу, L - поліном W u ( s) - переспостерігача, І - одинична матриця, e давальна функція спостерігача стану по управлінW y ( s) ню 7, e - передавальна функція спостерігача стану вихідного параметра об'єкта керування 8. Сигнал компенсаційного керування 15 у замкнутій системі визначається з наступного операторного рівняння, отриманого у відповідності зі структурною схемою двоконтурного керування (див. Фіг.1) (I − W W )∆u(t ) = W (I − W )[W N(u (t ) + ∆u(t ))]− W W u (t ) , I де u e I u We u e u e н I u e н - передавальна функція спостерігача стану по управлінню 7, y We - передавальна функ 4 ція спостерігача стану вихідного параметра об'єкту керування 8, І - одинична матриця, ∆u(t ) - сигнал N(uн (t ) + ∆u(t )) компенсаційного керування 15, нелінійна статична частина 1 з врахуванням комu (t ) - сигнал номінальпенсаційного керування, н ного керування. [ ] −1 u WI = We Якщо прийняти , що можливо при виконанні умов інверсії оператора або оборотності системи по входу, то представлене вище рівняння спрощується до взаємозв'язку статичних характеристик N(uн (t ) + ∆u(t )) − Kнuн (t ) = 0 , Kн - коефіцієнт пропорційності, що описує де номінальну нелінійність нестаціонарного нелінійного об'єкту керування. Представимо нелінійність нестаціонарного нелінійного об'єкту керування в наступному вигляді: ⎧K (u(t ) − ∆udz (t )), u(t )〉 0 N(u(t )) = ⎨ ⎩K (u(t ) + ∆udz (t )), u(t )〈0 , а для номінальної моделі приймаємо Nн (u(t )) = Kнu(t ) . Запишемо для даного типу нелінійності операторне рівняння u ⎧We (uн (t ) + ∆u(t ) − ∆udz (t )) − We uн (t ) = 0, u(t )〉0 ⎪ u ⎨ u u ⎪We (uн (t ) + ∆u(t ) + ∆udz (t )) − We uн (t ) = 0, u(t )〈0 ⎩ , ∆udz (t ) - сигнал, де u(t ) - сигнал керування, що описує зону нечутливості. Рішення останнього рівняння має вигляд ⎧ ∆u(t ) = ∆udz (t ), u(t )〉 0 ⎨ ⎩∆u(t ) = − ∆udz (t ), u(t )〈0 , підстановка якого у вихід об'єкту дає ⎧ ⎪W u (u (t ) + ∆udz (t ) − ∆udz (t )), u(t )〉0 y(t ) = ⎨ e н ⎪ u ⎩We (uн (t ) − ∆udz (t ) + ∆udz (t )), u(t )〈0 , u y(t ) = We uн (t ) . т.ч. Таким чином, одержуємо збіг виходів нестаціонарного нелінійного об'єкта керування і номінальної моделі і тим самим забезпечуємо компенсацію розглянутої нелінійності. Проте, залишається питання з реалізацією передавальної функції ітераційного інверсного фільтра 9. Передавальні функції системи по збурюванню і управлінню мають вигляд: Wyν (s ) = Wyu (s) = ∧ ⎛ ⎞ y W0 (s ) ⋅ ⎜ 1 − We / u (s ) ⋅ W1(s )⎟ ⎜ ⎟ ⎝ ⎠ ∧ ∧ ∧ ∧ y y 1 + W1(s ) ⋅ W0 (s ) − W1(s ) ⋅ W0 (s ) ⋅ We / y − We / u ⋅ W1 W0 (s) y y 1 + W1(s) ⋅ W0 (s) − W1(s) ⋅ W0 (s) ⋅ We / y − We / u ⋅ W1 , ∧ y We / u (s) де - передавальна функція сигналу оцінки виходу нестаціонарного нелінійного об'єкта 5 45234 6 ∧ y € We / y керування y від сигналу керування u(t), передавальна функція сигналу оцінки виходу не€ стаціонарного нелінійного об'єкта керування y від вихідного сигналу. Виходячи з передавальної функції системи по збурюванню, якщо забезпечити виконання умови ∧ ⎡ y ⎤ WI (s) = ⎢ We / u (s)⎥ ⎢ ⎥ ⎣ ⎦ −1 , то система стане інваріантною щодо збурювання. Труднощі складаються з визначенням передавальної функції ітераційного інверсного фільтра 9 із приведеної вище умови, тому ∧ y We / u (s) що якщо порядок чисельника буде більше порядку його знаменника, то в чисельнику передавальної функції ітераційного інверсного фільтру 9 з'явиться диференцююча ланка, яка є не бажаною і важкою для реалізації. Тому застосовуємо для одержання передавальної функції ітераційного інверсного фільтра 9 метод розкладання в ряд Неймона. 1 kν = ∧ y We / u (0 ) , то передаваЯкщо позначити льну функцію ∧ ⎡ y/ u ⎤ We (s)⎥ ⎢ ⎢ ⎥ ⎣ ⎦ −1 −1 можна представити як 2 n ⎡ ⎛ ∧ ∧ ∧ ⎞ ⎛ ⎞ ⎛ ⎞ ⎤ y y y = k ν ⋅ ⎢1 + ⎜1 − We / u (s) ⋅ k ν ⎟ + ⎜1 − We / u (s ) ⋅ k ν ⎟ + K + ⎜1 − We / u (s) ⋅ k ν ⎟ ⎥ ⎟ ⎜ ⎟ ⎜ ⎟ ⎥ ⎢ ⎜ ⎠ ⎝ ⎠ ⎝ ⎠ ⎥ ⎢ ⎣ ⎝ ⎦, −1 ∧ ⎡ y/ u ⎤ We (s)⎥ ⎢ ⎢ ⎥ ⎦ - передавальна функція ітераде ⎣ ційного інверсного фільтру 9, ∧ W y/ u (s) - мірильний множник 16, e - передавальна функція сигналу оцінки виходу нестаціона€ рного нелінійного об'єкта керування y , від сигналу керування u(t), n - ступінь наближення. Структурно дане представлення передавальної функції ітераційного інверсного фільтра 5 можна представити у вигляді, показаному на Фіг.2. Таким чином, компенсація нелінійності інерційного елемента типу «зона нечутливості» відбу kν ∧ ⎡ y/ u ⎤ ⎢ We (s)⎥ ⎢ ⎥ ⎣ ⎦ вається за рахунок введення додаткового складового сигналу компенсаційного керування 15 ( ∆u(t ) ) з урахуванням виходу ітераційноінверсного фільтра відновлення збурювання 9 як ∧ ⎞ ⎛ ∆u(t ) = − WI ⎜ y (t ) − y (t )⎟ ⎜ ⎟ ⎝ ⎠ . ∧ u y y(t ) = We u(t ) + We y(t ) Таким чином, запропонована система дозволяє компенсувати різницю між виходом моделі та виходом нестаціонарного нелінійного об'єкту, підвищити перешкодостійкість. 7 Комп’ютерна верстка Л. Купенко 45234 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of non-stationary non-linear object
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych, Tarasova Alina Serhiivna
Назва патенту російськоюСистема управления нестационарным нелинейным объектом
Автори російськоюДыбская Ирина Юрьевна, Бандура Иван Николаевич, Тарасова Алина Сергеевна
МПК / Мітки
МПК: G05B 13/00
Мітки: нестаціонарним, система, керування, нелінійним, об'єктом
Код посилання
<a href="https://ua.patents.su/4-45234-sistema-keruvannya-nestacionarnim-nelinijjnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Система керування нестаціонарним нелінійним об’єктом</a>
Система керування літаком
Номер патенту: 37288
Опубліковано: 25.11.2008
Автори: Ільченко Олексій Владиславович, Дибська Ирина Юріївна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: керування, система, літаком
Формула / Реферат:
Система керування літаком, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, сервопривід, паралельно підключений до золотникової тяги і електрично зв'язаний з датчиком кута, вмонтованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, датчик кутової швидкості, датчик кутового прискорення...
Система компенсації впливу нелінійності
Номер патенту: 25479
Опубліковано: 10.08.2007
Автори: Зимовін Анатолій Якович, Козлова Олена Миколаївна, Бандура Іван Миколайович, Дибська Ирина Юріївна
МПК: H03H 21/00
Мітки: система, впливу, компенсації, нелінійності
Формула / Реферат:
Система компенсації впливу нелінійності, яка містить послідовно з'єднані формувач задавального впливу, перший, другий суматори, лінійну динамічну і нелінійну статичну частини виконавчого пристрою, формувач вихідного сигналу, від'ємний зворотний зв'язок, підключений до другого входу першого суматора, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вхід якого підключений до виходу другого суматора, а вихід через перші...
Спосіб автоматичного керування нелінійним об’єктом
Номер патенту: 6507
Опубліковано: 16.05.2005
Автори: Мариношенко Олександр Петрович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: G05B 13/00
Мітки: спосіб, автоматичного, об'єктом, керування, нелінійним
Формула / Реферат:
Спосіб автоматичного керування нелінійним об’єктом, який полягає в тому, що вимірюють регульовану координату, отриманий сигнал порівнюють з сигналом завдання, результат порівняння підсумовують з сигналом компенсації нелінійності, який відрізняється тим, що результат порівняння перетворюють в пропорційний сигнал на виході моделі, результат перетворення масштабують і алгебраїчно підсумовують з сигналом керування, вимірюють сигнал завдання,...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Бандура Іван Миколайович, Шпак Ганна Сергіївна, Дибська Ирина Юріївна
МПК: G05B 13/00
Мітки: система, управління, адаптивна, нелінійна
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Семенов Леонід Антонович, Косовенко Євген Вікторович, Доценко Борис Іванович, Комендантова Людмила Степанівна, Сайног Максим Борисович, Смішко Григорій Павлович, Кузьмін В'ячеслав Павлович, Егліт Микола Олександрович, Яковенко Петро Олексійович
МПК: F42B 15/01
Мітки: аеродинамічного, спосіб, система, апаратом, зміни, компонування, керування, літальним
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Попередній патент: Адаптивна система стабілізації космічного літального апарата
Наступний патент: Спосіб запису і зберігання інформації безконтактної електронної картки
Випадковий патент: Спосіб дезактивації фумонізинів та похідних фумонізинів з використанням мікроорганізмів для дезактивації фумонізинів та кормова домішка, що містить цей мікроорганізм