Спосіб компенсації нелінійності інерційного елемента типу “зона нечутливості”
Номер патенту: 4558
Опубліковано: 17.01.2005
Автори: Ністратов Олександр Олександрович, Кулік Анатолій Степанович, Любинський Петро Леонідович, Дибська Ірина Юр'ївна
Формула / Реферат
Спосіб компенсації нелінійності інерційного елемента типу «зона нечутливості», що полягає у формуванні задавального впливу, формуванні керуючого впливу об'єктом, що має лінійну і нелінійну складові, формуванні зворотного зв'язку, який відрізняється тим, що додатково формують зворотний зв'язок оцінки збудження, для чого одержують сигнал помилки вихідного сигналу і на його основі за допомогою розкладання в ряд Неймона отримують сигнал оцінки збудження.
Текст
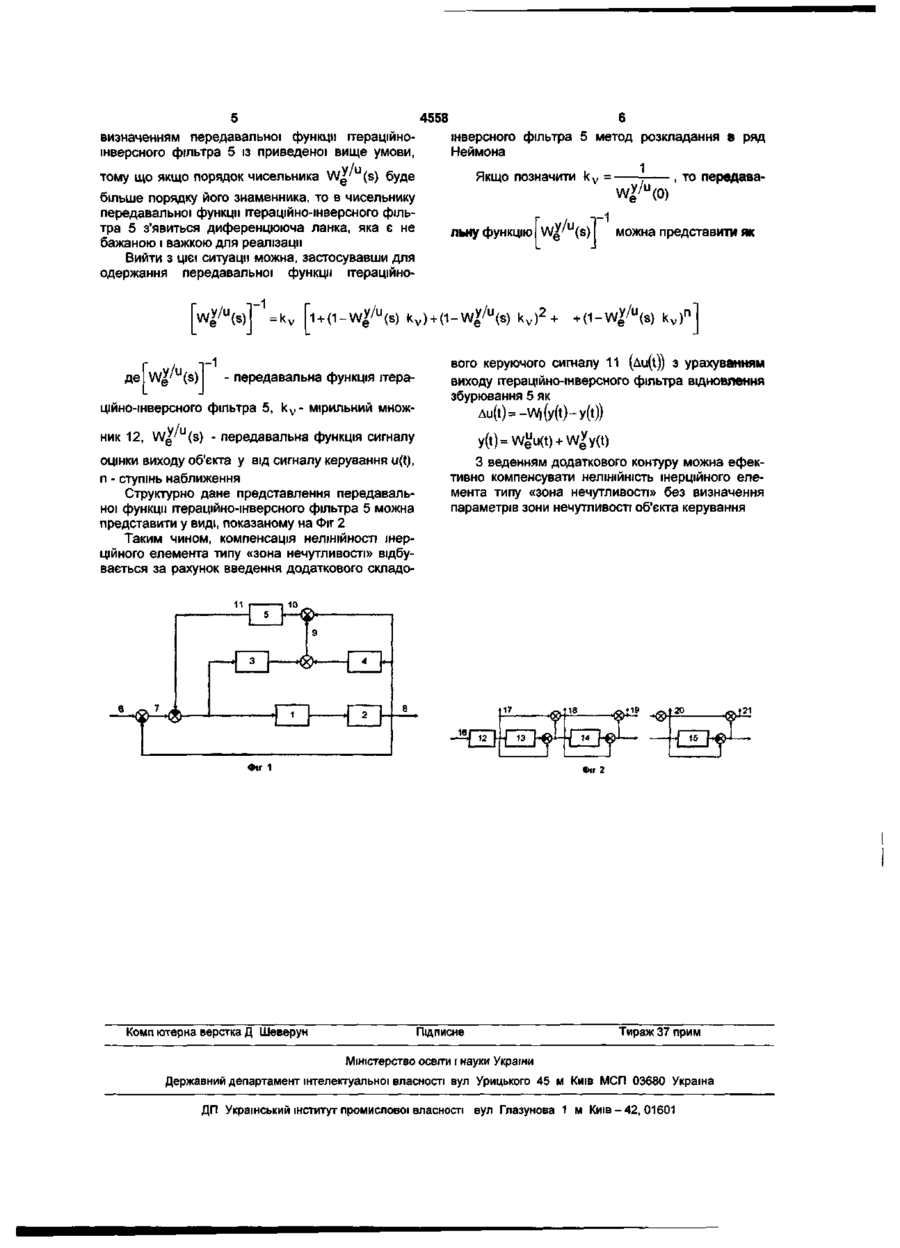
Спосіб компенсації нелініиності інерційного елемента типу «зона нечутливості», що полягає у формуванні задавального впливу, формуванні керуючого впливу об'єктом, що має лінійну і нелінійну складові, формуванні зворотного зв'язку, який відрізняється тим, що додатково формують зворотний зв'язок оцінки збудження, для чого одержують сигнал помилки вихідного сигналу і на його основі за допомогою розкладання в ряд Неймона отримують сигнал оцінки збудження. Корисна модель відноситься до систем автоматичного керування і може бути використана в системах з високими вимогами до якості керування магнітними або гідравлічними підсилювачами, вимірювально-перетворювальними елементами, механізмами з пружинним навантаженням. Відомий спосіб компенсації нелініиності інерційного елемента типу «зона нечутливості» (Следящая система. А.С №407286, Кл. G05B17/02, опубл. 18.10.71, Бюл.№46) полягає у формуванні задаючого впливу, формуванні керуючого впливу двигуном з нелінійністю типу «зона нечутливості», формуванні зворотного зв'язку, формуванні диференцюючого контуру, формуванні контуру адаптації типу пасивна адаптація з еталонною моделлю. До недоліків даного способу можна віднести: необхідність одержання сигналів, що випереджають по фазі вхідні сигнали, одержання додаткової складової керуючого впливу на виході блоку пасивної адаптації, що підвищує точність роботи системи у вузькому діапазоні зміни параметрів двигуна, обумовлених дією збурювань Відомий спосіб компенсації нелініиності інерційного елемента типу «зона нечутливості», узятий як прототип (описаний у Зайцев Г.Ф., Стеклов В.К. «Автоматические системы с дифференциальными связями» Киев «Техника», 1984, стр.43) полягає у формуванні задаючого впливу, формуванні керуючого впливу об'єктом, який має лінійну і нелінійну складову, формуванні зворотнього зв'язку, формуванні додаткового зв'язку типу «диференціальна вилка», введенні компенсуючого прямого зв'язку типу релейна функція з переключенням з зворот нього значення керування - U o у пряме значення керування и 0 в нулі. Недоліком даного способу є неможливість з великою точністю знати поріг нечутливості в кожен момент часу для визначення значення керування U o компенсуючого елемента, що знижає точність керування інерційним елементом з нелінійністю типу «зона нечутливості». Задачею корисної моделі є підвіщення точності керування за рахунок розробки способу компенсації нелініиності інерційного елемента типу «зона нечутливості» без визначення параметрів зони нечутливості об'єкта керування. Поставлена задача вирішується тим, що у спосіб, який полягає у формуванні задаючого впливу, формуванні керуючого впливу об'єктом, що має лінійну і нелінійну складові, формуванні зворотного зв'язку, додатково формують зворотний зв'язок оцінки збурювання, для чого одержують сигнал помилки вихідного сигналу і на його основі за допомогою розкладання в ряд Неймона отримують сигнал оцінки збурювання. Принцип дії пропонованого способу пояснюється блок-схемою адаптації, показаної на Фіг.1, та блок-схемою реалізації ітераційно-інверсного фільтра, показаної на Фіг.2. На блок-схемі адаптації позначені: нелінійна статична частина 1 (N(u(t))), лінійна динамічна частина виконавчого пристрою 2 з передавальною функцією W0(s), спостерігач стану по керуванню З з передавальною функцією \NQ (S) , спостерігач стану вихідного параметра об'єкта керування 4 з 00 ю ю о> 4558 передавальною функцією W^ (s), ітераційно інверсний фільтр 5 з передавальною функцією W|(s), задаючий вплив 6 (д), сигнал керування 7 (и), ВИХІДНИЙ сигнал 8 (у), сигнал оцінки виходу об'єкта 9 (y(t)), сигнал помилки вихідного сигналу 10 (ду), сигнал оцінки збурювання 11 (v) На блок-схемі реалізації ітераційно-інверсного фільтра показані мірильний множник 12 1 (kv = ), нелінійні фільтри 13-15 з передавальними функціями ,Ф k v , помилка вихід ного сигналу 16 (ду), 1-ше наближення сигналу оцінки збурювання 17 ( у і ) , 2-ге наближення сиг 4 N(u H (t)+Au(t)) - нелінійна статична частина 1 з врахуванням додаткового компенсаційного керування, u H (t) - сигнал номінального керування Якщо прийняти W| = , що можливо при виконанні умов інверсії оператора або оборотності системи по входу, то представлене вище рівняння спрощується до взаємозв'язку статичних характеристик N(u H (t)+Au(t))-K H u H (t) = O, де К н - коефіцієнт пропорційності, що описує номінальну нелінійнють об'єкта керування Представимо нелінійнють об'єкта в наступному вигляді = |K((t)-Audz(t)),u(t)>0 налу оцінки збурювання 18 (v2), 3-тє наближення [K((t) + A u d z ( t ) ) , u ( t ) 0 [ = -Audz(t),u(t) 0 l w ^ ( u H ( t ) - A u d z ( t ) + Au d2 т ч y(t) = WgU H (t) Таким чином, одержуємо збіг виходів нелінійного об'єкта і номінальної моделі і тим самим забезпечуємо компенсацію розглянутої нелінійності Проте, залишається питання з реалізацією передатної функції ітераційно-інформаційного фільтра 5 Передатні функції системи по збурюванню і керуванню мають вигляд Wn(s) ( 1 - ^ W y v (s) = W y u (s) = 1 + W-i (s) W o (s) - W-i (s) W 0 (s) Wp(s) 1 + Wi(s) W0(s)-W-|(s) W0(s) ' Щ ' - WyIй Щ де Wg'' (s) - передавальна функція сигналу оцінки виходу об'єкта у від сигналу керування u(t), W ^ ' ^ - передавальна функція сигналу оцінки виходу об'єкта у від вихідного сигналу Виходячи з передавальної функції системи по збурюванню, якщо забезпечити виконання умови V\^(s)= wjf/ u (s) , то система стане інваріант ною щодо збурювання Труднощі складаються з 4558 визначенням передавальної функції ітераційноінверсного фільтра 5 із приведеної вище умови, інверсного фільтра 5 метод розкладання в ряд Неймона тому що якщо порядок чисельника W e / ' u (s) буде більше порядку його знаменника, то в чисельнику передавальної функції ітераційно-інверсного фільтра 5 з'явиться диференцююча ланка, яка є не бажаною і важкою для реалізації Вийти з цієї ситуації можна, застосувавши для одержання передавальної функції ітераційно Якщо позначити k v = льну функцію \N)£'u(s) -1 Г1 - передавальна функція ітера де] W^[' u (s) I ційно-інверсного фільтра 5, k v - мірильний множ вого керуючого сигналу 11 (Au(t)) з урахуванням виходу ітераційно-інверсного фільтра відновлення збурювання 5 як Au(t)=-W,(y(t)-y(t)) ник 12, V\l£'u(s) - передавальна функція сигналу оцінки виходу об'єкта у від сигналу керування u(t), п - ступінь наближення Структурно дане представлення передавальної функції ітераційно-інверсного фільтра 5 можна представити у виді, показаному на Фіг 2 Таким чином, компенсація нелінійності інерційного елемента типу «зона нечутливості» відбувається за рахунок введення додаткового складо можна представити як kv)n kv)2+ =k , то передава y(t)=Wgu(t) + w|y(t) З веденням додаткового контуру можна ефективно компенсувати нелінійність інерційного елемента типу «зона нечутливості» без визначення параметрів зони нечутливості об'єкта керування .—ф* ^••WW4>UIII»|^« *Оч І ЩГМІІИ.МВ /і К Фіг 1 Комп ютерна верстка Д Шеверун Фіг 2 Підписне Тираж 37 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності вул Урицького 45 м Київ МСП 03680 Україна ДП Український інститут промислової власності вул Глазунова 1 м Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of compensating the nonlinearity of an inertial element with a dead band
Автори англійськоюKulik Anatolii Stepanovych
Назва патенту російськоюСпособ компенсации нелинейности инерционного элемента с зоной нечувствительности
Автори російськоюКулик Анатолий Степанович
МПК / Мітки
МПК: H03H 21/00
Мітки: зона, інерційного, нечутливості, елемента, типу, нелінійності, компенсації, спосіб
Код посилання
<a href="https://ua.patents.su/4-4558-sposib-kompensaci-nelinijjnosti-inercijjnogo-elementa-tipu-zona-nechutlivosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації нелінійності інерційного елемента типу “зона нечутливості”</a>
Формувач зони нечутливості
Номер патенту: 66543
Опубліковано: 17.05.2004
Автор: Ткачов Анатолій Іванович
МПК: G06G 7/25
Мітки: зони, нечутливості, формувач
Формула / Реферат:
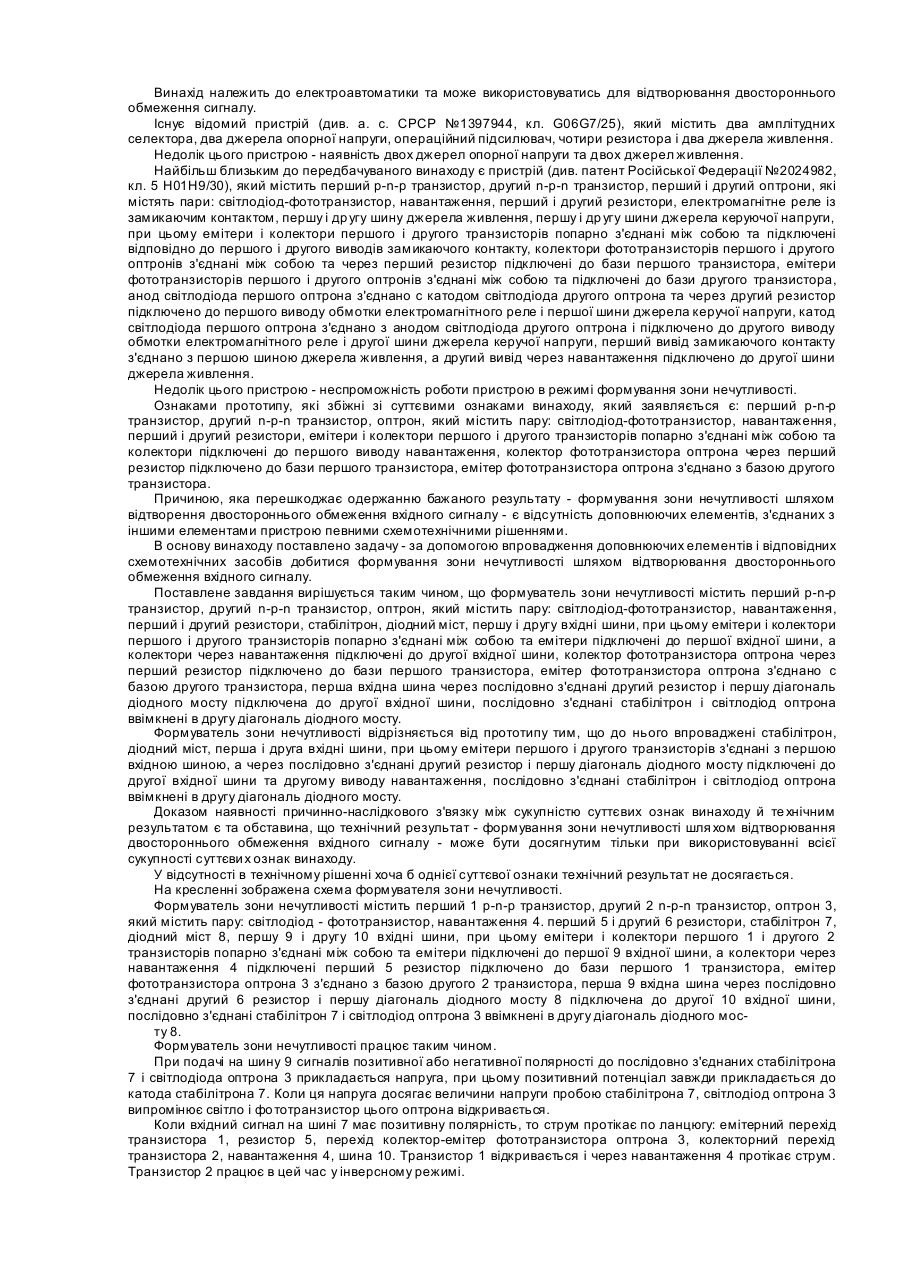
Формувач зони нечутливості, який містить перший р-n-р транзистор, другий n-р-n транзистор, оптрон, який містить пару світлодіод-фототранзистор, навантаження, перший і другий резистори, емітери і колектори першого і другого транзисторів, попарно з'єднані між собою, та колектори підключені до першого виводу навантаження, колектор фототранзистора оптрона через перший резистор підключено до бази першого транзистора, емітер фототранзистора оптрона...
Спосіб виготовлення фільтрувального елемента трубчастого типу
Номер патенту: 47685
Опубліковано: 15.07.2002
Автори: Сова Ромен Юхимович, Прушанський Максим Йосипович, Карпенко Петро Олександрович, Луцько Василь Степанович, Шаповал Олександр Євгенович, Загороднюк Юрій Вікторович
МПК: B01D 29/00, B01D 27/00, B01D 39/02
Мітки: трубчастого, типу, фільтрувального, елемента, спосіб, виготовлення
Формула / Реферат:
Спосіб виготовлення фільтрувального елемента трубчастого типу, який включає розміщення між підкладками, що виготовлені з нетканого пористого волокна на основі поліетилену і/або поліпропілену, послідовно розміщених шарів фільтрувального матеріалу, один з яких являє собою папір, виготовлений із карбоксиметилцелюлози з бентонітом і/або палигорскітом, а наступний - шар паперу, виготовлений із фосфатцелюлози, причому підкладки формують...
Формувач зони нечутливості та обмеження
Номер патенту: 68662
Опубліковано: 16.08.2004
Автор: Ткачов Анатолій Іванович
МПК: G06G 7/25
Мітки: формувач, зони, обмеження, нечутливості
Формула / Реферат:
Формувач зони нечутливості та обмеження, що містить джерело опорної напруги, перший і другий транзистори, перший і другий резистори, першу і другу вхідні шини, при цьому бази транзисторів з‘єднані між собою і підключені до першого виводу джерела опорної напруги, емітери першого і другого транзисторів підключені до другого виводу джерела опорної напруги відповідно через перший і другий резистори, який відрізняється тим, що додатково він...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: аеростатичної, вала, обертового, шпиндельної, компенсації, гіроскопічного, моменту, елемента, пристрій, наприклад, опори
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Блок-схема сенсорного нейроподібного елемента
Номер патенту: 3636
Опубліковано: 15.12.2004
Автор: Івановський Олександр Володимирович
МПК: G06G 7/60
Мітки: сенсорного, елемента, нейроподібного, блок-схема
Формула / Реферат:
Блок-схема сенсорного нейроподібного елемента, що містить синаптичний канал для надходження вхідного сигналу, технічно реалізований у вигляді компаратора, логічний елемент І, яка відрізняється тим, що в неї додатково введено елемент пам’яті, вхід якого зв’язаний з виходом логічного елемента І, а вихід синаптичного каналу зв'язаний з входом логічного елемента І.
Попередній патент: Спосіб стабілізації одержання рибопродуктивності ставів
Наступний патент: Пристрій для контролю ресурсу групи повітряних високовольтних вимикачів
Випадковий патент: Провід неізольований зрівноважений