Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович

Формула / Реферат
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси вращения вращательного элемента, электрически связанные с упомянутыми датчиками и с дифференциальными усилителями сигнала погрешности положения оси вращательного элемента по оси "X" и по оси "Y", отличающееся тем, что оно дополнительно содержит переключатель "опорное - работа", интеграторы выходного напряжения измерителя величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", аналого-цифровые преобразователи, кнопку "старт", источник постоянного напряжения, схему клапанов, регистры хранения кодов постоянной составляющей измерителей величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", схемы задержки сигналов готовности, цифроаналоговые преобразователи, блоки выделения огибающей выходного напряжения измерителей величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", блок формирования опорного напряжения несмещенного положения оси вращения вращательного элемента по оси "X" и по оси "Y", причем, датчик величины смещения оси вращения вала по оси "X" соединен с входом измерителя величины смещения оси вращения вала по оси "X", выход измерителя величины смещения оси вращения вала по оси "X" через переключатель "опорное - работа", в положении "опорное" соединен с входом интегратора выходного напряжения измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с информационным входом аналого-цифрового преобразователя, информационный выход аналого-цифрового преобразователя соединен с информационным входом схемы клапанов, сигнальный выход аналого-цифрового преобразователя соединен с входом схемы задержки сигнала готовности и с сигнальным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X", выход схемы задержки сигнала готовности соединен с сигнальным входом схемы клапанов, выход схемы клапанов соединен с информационным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с входом цифроаналогового преобразователя, выход аналого-цифрового преобразователя соединен с первым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X", выход измерителя величины смещения оси вращения вала по оси "X" через переключатель "опорное - работа" в положение "работа" соединен с входом блока выделения огибающей выходного напряжения измерителя величины, смещения оси вращения вала по оси "X" и со вторым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X", выход блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" соединен со вторым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", датчик величины смещения оси вращения вала по оси "Y" соединен с входом измерителя величины смещения оси вращения вала по оси "Y", выход измерителя величины смещения оси вращения вала по оси "Y" через переключатель "опорное - работа" в положение "опорное"' соединен с входом интегратора выходного напряжения измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с информационным входом аналого-цифрового преобразователя, информационный выход аналого-цифрового преобразователя соединен с информационным входом схемы клапанов, сигнальный выход аналого-цифрового преобразователя соединен с входом схемы задержки сигнала готовности и с сигнальным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", выход схемы задержки сигнала готовности соединен с сигнальным входом схемы клапанов, выход схемы клапанов соединен с информационным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с входом цифроаналогового преобразователя, выход цифроаналогового преобразователя соединен с первым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "Y", а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y", выход измерителя величины смещения оси вращения вала по оси "Y" через переключатель "опорное - работа" в положение "работа" соединен с входом блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" и с вторым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y", выход блока выделения огибающей выходного напряжения измерителя величины смещения вала по оси "Y" соединен с вторым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "Y", первый выход дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X" соединен с компенсатором смещения оси вращения вала, установленным по оси "+YA" и с компенсатором смещения оси вращения вала, установленным по оси "-YB", а его второй выход соединен с компенсатором смещения оси вращения вала, установленным по оси "-YA" и с компенсатором смещения оси вращения вала, установленным по оси "+YB", первый выход дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y" соединен с компенсатором смещения оси вращения вала, установленным по оси "+XA" и с компенсатором смещения оси вращения вала, установленным по оси "-XB", а его второй выход соединен с компенсатором смещения оси вращения вала, установленным по оси "-XA" и с компенсатором смещения оси вращения вала, установленным по оси "+XB", источник постоянного напряжения соединен с кнопкой "старт", кнопка "старт" соединена с сигнальными входами аналого-цифровых преобразователей.
2. Устройство по п.1, отличающееся тем, что регуляторы давления включают толкатели, укрепленные на пьезоэлектрических двигателях быстродействующих регуляторов давления, коромысла, установленные на стойки с возможностью поворота, а регулировочные иглы установлены на коромыслах напротив подводящих каналов регулируемого проходного сечения жиклеров быстродействующих регуляторов давления.
Текст
Изобретение относится к машиностроению и может быть использовано в прецизионных шлифовальных станках. Наиболее близким техническим решением, принятым за прототип, является устройство компенсации гироскопического момента вращательного элемента (Авт. св. СССР №1500805, кл. F16C32/06, опубл. 15.08.89, Бюл. №30) при использовании его в аэростатической шпиндельной опоре. Это устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержит датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси вращения вращательного элемента, электрически связанные с упомянутыми датчиками и с дифференциальными усилителями сигнала погрешности положения оси вращательного элемента по оси "X" и по оси "Y". Работает известное по прототипу устройство следующим образом. При смещении вала под действием радиальной составляющей нагрузки изменяются величины зазоров под датчиками величин зазоров. Сигналы датчиков величин зазоров измерителями величин зазоров преобразуются в напряжения, соответствующие величинам зазоров под этими датчиками, которые поступают на входы соответствующих элементов сравнения. На вторые входы элементов сравнения поступают сигналы задатчиков, соответствующие заданным величинам зазоров под датчиками величин зазоров. При отклонении величин зазоров под датчиками величин зазоров от заданных значений на элементах сравнения возникают сигналы рассогласования. После усиления сигнал рассогласования с каждого элемента сравнения поступает на ту группу параллельно подключенных регуляторов давления, которая расположена симметрично той же оси системы координат, по которой установлен датчик величины зазора, по сигналу которого был сформирован этот сигнал рассогласования. Группы параллельно подключенных регуляторов давления создают в зазорах аэростатической шпиндельной опоре подъемную силу, компенсирующую радиальную составляющую нагрузки, и предотвращают изменение величин зазоров под датчиками величин зазоров, а, следовательно, и смещение оси вращения вала аэростатической шпиндельной опоры. Недостатком устройства прототипа является следующее: вращательные элементы, в данном случае, валы аэростатических шпиндельных опор изготавливаются с погрешностями размеров и формы. Некруглость вала, как правило, составляет (5 - 10)мкм. Из-за некруглости вала зазоры под датчиками величин зазоров постоянно изменяются независимо от воздействия нагрузки. Поэтому сигнал рассогласования имеет место и тогда, когда вал аэростатической шпиндельной опоры, самоцентрировался и вращался без смещения оси вращения. Вал опоры, а следовательно, и его ось вращения системой автоматического управления будет постоянно смещаться на (5 - 10)мкм. Это не позволяет использовать систему автоматического управления положением вала (положением оси вращения вала) прототипа в прецизионных шлифовальных станках. Необходимо исключить влияние некруглости вала опоры на положение ее оси вращения. Кроме того, в устройстве по прототипу смещение вала опоры происходит в направлении действия радиальной составляющей нагрузки. Скорость вращения вала высокооборотной аэростатической опоры шлифовального станка составляет (70000 - 120000)об./мин. Следовательно вал такой опоры является гироскопом. Под действием радиальной составляющей РШ силы шлифования (фиг.1) вал-гироскоп совершает совершенно другое движение, чем вал аэростатической шпиндельной опоры по авт. св. СССР №1500805 (Бутенин Н.В. и др. Курс теоретической механики. - М.: Наука. 1971. - С.301). Момент силы Pш относительно неподвижной точки "q" будет направлен перпендикулярно к плоскости, проходящей через линию действия силы Pш и точку "q". В результате ось вращения вала гироскопа начнет движение в направлении момента , т.е. перпендикулярно к линии действия силы Pш , пока момент не будет уравновешен моментом, создаваемым газовым слоем высокооборотной аэростатической шпиндельной опоры. Эта особенность смещения оси вращения вала - гироскопа под действием радиальной составляющей Pш силы шлифования также требует модернизации системы автоматического управления положением оси вращения аэростатической шпиндельной опоры по авт. св. СССР №1500805. В основу изобретения поставлена задача такого усовершенствования конструкции устройства компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, при котором за счет введения целого ряда новых элементов обеспечивается предотвращение смещения оси вращения вращательного элемента, преимущественно при высокооборотном вращении, под воздействием радиальной составляющей, а также из-за некруглости вращательного элемента и, как следствие, повышение точности обработки. Решение задачи достигается тем, что устройство компессации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащей датчики величин смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы вращения оси вращения вращательного элемента электрически связанные с упомянутыми датчиками и с дифференциальными усилителями сигнала погрешности положения оси вращательного элемента по оси "X" и по оси "Y", отличающееся тем, что оно дополнительно включает переключатель "опорное - работа", интеграторы выходного напряжения измерителя величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", аналогоцифровые преобразователи, кнопку "старт", источник постоянного напряжения, схему клапанов, регистры хранения кода постоянной составляющей измерителей величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", схемы задержки сигналов готовности, цифроаналоговые преобразователи, блоки выделения огибающей выходного напряжения измерителя величины смещения оси вращения вращательного элемента по оси "X" и по оси "Y", блок формирования опорного напряжения несмещенного положения оси вращения вращательного элемента по оси "X" и по оси "Y", причем, датчик величины смещения оси вращения вала по оси "X" соединен с входом измерителя величины смещения оси вращения вала по оси "X", выход измерителя величины смещения оси вращения вала по оси "X" через переключатель "опорное - работа" в положении "опорное" соединен с входом интегратора выходного напряжения измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с информационным входом аналого-цифрового преобразователя, информационный выход аналогоцифрового преобразователя соединен с информационным входом схемы клапанов, сигнальный выход аналого-цифрового преобразователя соединен с входом схемы задержки сигнала готовности и с сигнальным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения по оси "X", выход схемы задержки сигнала готовности соединен с сигнальным входом схемы клапанов, выход схемы клапанов соединен с информационным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с входом цифроаналогового преобразователя, выход аналого-цифрового преобразователя соединен с первым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X", выход измерителя величины смещения оси вращения вала по оси "X" через переключатель "опорное - работа" в положение "работа" соединен с входом блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" и с вторым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X", выход блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" соединен со вторым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", датчик величины смещения вала по оси "Y" соединен с входом измерителя величины смещения оси вращения вала по оси "Y", выход измерителя величины смещения оси вращения вала по оси "Y" через переключатель "опорное - работа" в положении "опорное" соединен с входом интегратора выходного напряжения измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с информационным входом аналого-цифрового преобразователя, информационный выход аналого-цифрового преобразователя соединен с информационным входом схемы клапанов, сигнальный выход аналого-цифрового преобразователя соединен с входом схемы задержки сигнала готовности и с сигнальным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", выход схемы задержки сигнала готовности соединен с сигнальным входом схемы клапанов, выход схемы клапанов соединен с информационным входом регистра хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с входом цифроаналогового преобразователя, выход цифроаналогового преобразователя соединен с первым входом блока формирователя опорного напряжения несмещенного положения оси вращения вала по оси "Y", а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y", выход измерителя величины смещения оси вращения вала по оси "Y" через переключатель "опорное - работа" в положении "работа" соединен с входом блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" и со вторым входом дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y", выход блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" соединен, со вторым входом блока формирования опорного напряжения несмещенного положения оси вращения вала по оси "Y", первый выход дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "X" соединен с компенсатором смещения оси вращения вала, установленным по оси "+YA" и с компенсатором смещения оси вращения вала, установленным по оси "-YB", а его второй выход соединен с компенсатором смещения оси вращения вала, установленным по оси "-YA" и с компенсатором смещений оси вращения вала, установленным по оси "+YB", первый выход дифференциального усилителя сигнала погрешности положения оси вращения вала по оси "Y" соединен с компенсатором смещения оси вращения вала; установленным по оси "+XA" и с компенсатором смещения оси вращения вала, установленным по оси "-XB", а его второй выход соединен с компенсатором смещения оси вращения вала, установленным по оси "-XA" и с компенсатором смещения оси вращения вала, установленным по оси "+XB", источник постоянного напряжения соединен с кнопкой "старт", кнопка "старт" соединена с сигнальными входами аналого-цифровых преобразователей. Решение задачи достигается также тем, что регуляторы давления включают толкатели, укрепленные на пьезоэлектрических двигателях быстродействующих регуляторов давления, коромысла, установленные на стойках с возможностью поворота, а регулировочные иглы установлены на коромыслах напротив подводящих каналов регулируемого проходного сечения жиклеров быстродействующих регуляторов давления. Причинно-следственная связь между заявляемым техническим решением и достигаемым техническим результатом состоит в следующем. На фиг.1 представлена высокооборотная аэростатическая шпиндельная опора шлифовального станка, скорость вращения вала которой составляет десятки тысяч оборотов в минуту. Эта аэростатическая шпиндельная опора, как и опора прототипа, включает группы параллельно подключенных, образующие компенсаторы смещения оси вращения вала регуляторов давления (по три, в данном примере регулятора давления в каждой группе регуляторов давления), установленные в сечениях по A - A и B - B (фиг.1) опоры. В каждом упомянутом сечении устанавливают четыре группы регуляторов давления (фиг.2), причем, каждую группу регуляторов давления в сечениях по A - A и B - B устанавливают симметрично относительно осей систем координат OAXAYA и OBXBYB, одноименные оси которых параллельны между собой, а их начала лежат на оси симметрии внутренней поверхности корпуса аэростатической шпиндельной опоры. В сечении по C - C аэростатической шпиндельной опоры (фиг.2) по осям X и Y системы координат OXY установлены два датчика величин зазоров между основаниями этих датчиков и поверхностью вала аэростатической шпиндельной опоры (датчик величины смещения оси вращения вала). Начало системы координат OXY также лежит на оси симметрии внутренней поверхности корпуса опоры, а ее оси параллельны осям систем координат OAXAYA и OBXBYB. Пусть вал аэростатической шпиндельной опоры навесом и вместе с внутренней поверхностью корпуса опоры изготовлен без погрешностей. При этих условиях вал в газовом слое опоры займет положение, при котором ось симметрии внутренней поверхности корпуса опоры, ось симметрии вала и ось вращения вала опоры будут совпадать, а присутствие внешних нагрузок вращения вала будет происходить без смещения его оси вращения. Реально вал и внутренняя поверхность корпуса опоры изготавливаются с погрешностями размеров и формы, которые деформируют поле давления в газовом слое этой опоры. Поэтому на каждом фиксированном угловом положении вал смещается в газовом слое опоры и занимает новое равновесное положение, соответствующее нулевому значению главного вектора сил давления в газовом слое опоры. Пусть центр тяжести "q" вала (фиг.3) лежит в плоскости Q, перпендикулярно его оси симметрии, между линиями наддува радиальной аэростатической опоры. "C" - жесткость аэростатической шпиндельной опоры. Зададим валу вращение с возрастающей угловой скоростью от w = 0 до номинальной скорости вращения, например, w = - 1000000об./мин. Пренебрегая малым смещением вала в газовом слое опоры изза деформации ее поля давления погрешностями размеров и формы изготовления, можно считать, что при близкой к нулю скорости вращения вала опоры его геометрическая ось вращения Z неподвижна и определяется положением, которое вал занял в газовом слое при скорости вращения w = 0, 0 - точка пересечения оси вращения вала с плоскостью Q (фиг.3). С увеличением скорости вращения вала растет момент количеств движения вала опоры относительно его оси вращения: где lZ - момент инерции вала аэростатической шпиндельной опоры относительно оси вращения. На вал аэростатической шпиндельной опоры действуют две внешние силы: - сила тяжести вала; - сила упругости (жесткости) газового слоя. Пусть масса вала M сосредоточена в центре тяжести. Тогда производная по времени момента количеств движения вала равна главному моменту внешних сил относительно неподвижной точки q (фиг.3) на оси вращения вала (Бутенин Н.В. и др. Курс теоретической механики. - Т.II. - М.: Наука, 1971. - С.173): Рост момента количеств движения при увеличении скорости вращения вала опоры вызывает изменение главного момента внешних сил за счет того, что вал стремясь самоцентрироваться изменяет свое положение в газовом слое аэростатической опоры, что в свою очередь вызывает изменение силы упругости газового слоя, воздействующей на вал. Пусть при скорости вращения вала положение Z1 (фиг.3). Тогда , причем ось вращения вала сместится на величину "r" и займет где C - жесткость газового слоя; M - масса вала: e- эксцентриситет вала, равного расстоянию между осью вращения Z и центром тяжести "q1" вала аэростатической шпиндельной опоры (фиг.3) (Бать М.И. и др. Теоретическая механика в размерах и задачах. - М.: Наука, 1985. - С.279). В зависимости от угловой скорости вращения вала расстояние (фиг.3) между начальным положением оси Z вращения вала и центром тяжести "q1" определяется выражением (см. там же, с.279). При и его центр тяжести приближается к оси вращения. Следовательно вал в упругом газовом слое аэростатической шпиндельной опоры самостоятельно центрируется. В силу того, что на каждом угле поворота вала сила давления в газовом слое опоры из-за деформации поля давления изменяется по направлению и при больших оборотах вала воздействует на него кратковременно, ось вращения самоцентрировавшегося вала аэростатической шпиндельной опоры при отсутствии внешних нагрузок не изменяет своего положения (Бутенин Н.В. и др. Курс теоретической механики. - Т.II. - М.: Наука, 1971. - С.301). Отметим, что при скоростях вращения вала w = 70000 - 120000об./мин вал аэростатической шпиндельной опоры является гироскопом [см. там же, с.298]. Пусть высокооборотная аэростатическая шпиндельная опора используется в качестве элемента формообразующей системы шлифовального станка. Пусть также Pш - радиальная составляющая силы шлифования (фиг.1), направленная перпендикулярно оси вращения вала опоры по оси "X" неподвижной системы координат OXY (фиг.4) в направлении полуоси OX и приложена к шлифовальному кругу (фиг.1). Если бы вал опоры не был гироскопом и не имел запаса по самоцентровке, то под действием силы Pш он перемещался бы в направлении действия этой силы. В данном случае, когда угловая скорость вращения вала составляет (70000 - 120000)об./мин, вал опоры является гироскопом и под действием момента силы Pш относительно неподвижной точки "q", который направлен перпендикулярно к плоскости, проходящей через линию действия силы Pш и неподвижную точку "q" (фиг.3), ось вращения вала опоры будет поворачиваться в плоскости действия момента . При этом зазор под датчиком C2 (фиг.4) установленным по оси Y системы координат OXY в сечении аэростатической шпиндельной опоры по C - C будет увеличиваться. Вал опоры с угловой скоростью прецессии будет поворачиваться до положения, при котором момент радиальной составляющей силы шлифования Pш будет уравновешен моментом сил, возникающим в смазочном газовом слое аэростатической шпиндельной опоры при повороте вала. Следовательно, процесс шлифования будет происходить со смещением оси вращения вала опоры, что приводит к увеличению погрешности изготовления изделия шлифованием. Для предотвращения смещения оси вращения вала высокооборотной аэростатической шпиндельной опоры при воздействии радиальной составляющей силы Pш шлифования необходимо выполнить следующее. Заменим радиальную составляющую силы шлифования Pш парой сил Q1 и Q2, приложенных к валу в плоскостях установки групп регуляторов давления (в сечениях опора по A - A и B - B) и создающих момент пары сил относительно неподвижной точки "q", вокруг которой происходит поворот оси вращения вала, . равный моменту На основании третьего закона Ньютона вал-гироскоп будет воздействовать на газовый слой опоры с силами F1 и F2 (также отнесенных к плоскостям установки групп регуляторов давления), равных по модулю и противоположно направленных силам Q и Q1 (фиг.3). Момент этих сил называется гироскопическим моментом , причем (см. там же, с.303): где W Z - угловая скорость вращения оси симметрии вала. Следовательно, если при увеличении зазора под датчиком C2 величины зазора с помощью группы регуляторов давления, установленной в сечении опоры по A - A на полуоси - OAXA системы координат OAXAYA создать силу давления P k1 на вал, равную по величине и направлению силе F1, а с помощью группы регуляторов давления, установленной в сечении опоры по B - B на полуоси +OBXB системы координат OBXBYB создать силу давления Pk2 на вал, равную по величине и направлению силе F2, пара сил Pk1 и Pk2 создать компенсирующий момент направлению моменту равный по величине и противоположный по поворачивающему вал при воздействии на шлифовальный круг радиальной будет компенсирован моментом и составляющей силы шлифования Pш , следовательно момент процесс шлифования будет происходить без смещения (прецессии) оси вращения вала аэростатической шлифовальной опоры. Если при воздействии силы Pш зазор по датчикам C2 величины зазора уменьшается, для компенсации момента , так как при этом силы F1 и F2 изменяют направление, силу давления Pk3 на вал, равную F1, создают группой регуляторов, установленной по оси +OAXA системы координат OAXAYA, а силу Pk4 на вал, равную F2, создают группой регуляторов давления, установленной по оси -OBXB системы координат OBXBYB. В том случае, если радиальная составляющая сила шлифования Pш направлена по оси Y системы координат OCXCYC в направлении полуоси -OCYC, вал опоры под воздействием момента поворачивается так, что увеличивается зазор под датчиком C1 величины зазора. В этом случае для компенсации момента , создаваемого силой Pш , силу давления Pk5 = F1 на вал опоры создают группой регуляторов давления; установленной на полуоси -OAYA системы координат OAXAYA, а силу давления Pk6 = F2 на вал опоры создают группой регуляторов давления, установленной на полуоси +OBYB системы координат OBXBYB. Если сила Pш направлена в направлении полуоси +OCYC, как и в первом случае, силы F1 и F2 изменяют направление. Поэтому силу Pk7 = F1 создают группой регуляторов давления, установленной по оси +OAYA, а силу давления Pk8 = F2 на вал опоры создают группой регуляторов давления, установленной на полуоси OBYB системы координат OBXBYB. Если радиальная составляющая Pш сила шлифования не совпадает с направлением осей систем координат OAXAYA, OBXBYB, OXY, силу давления на вал опоры создают в соответствии с величиной и направлением составляющих Pшx и Pшy силы Pш по осям "X" и "Y" названных систем координат по приведенному выше правилу. Как показано выше, компенсация момента радиальной составляющей силы шлифования Pш выполняется при изменении величин зазоров под датчиками C1 и C2, установленных по осям системы координат OXY в сечении опоры по C - C, от их значений, соответствующих несмещенному положению оси вращения вала опоры. Однако из-за некруглости вала (фиг.4) величина зазоров под датчиками C и C2 будут изменяться и тогда, когда вал вращается без смещения оси вращения, то есть самоцентрировался, а радиальная составляющая сила шлифования Pш = 0. Положение оси вращения вала опоры определяется средними значениями напряжений Uср.x и Uср.y (фиг.5) на выходах измерителей величин зазоров. Устройство автоматического управления положением оси вращения вала высокооборотной аэростатической шпиндельной опоры, если величина зазоров под датчиками C1 и C2 изменяются только изза некруглости вала (без смещения оси вращения самоцентрировавшегося вала), не должно изменять положение оси вращения вала опоры. Исключить влияниенекруглости вала на работу устройства можно следующим образом. Одному обороту вала опоры соответствует два периода переменной составляющей напряжений Uизм.x и Uизм.y на выходах измерителей величин зазоров Z1 и Z2 под датчиками C1 и C2, установленных по осям XC и YC системы координат XCOCYC соответственно (фиг.5). Причем, если вал самоцентрировался, амплитуды переменных составляющих на выходах измерителей величин зазоров не зависят от положения оси вращения вала опоры и определяются только величиной некруглости вала. Для выделения средних значений напряжений на выходах измерителей величин зазоров подадим напряжения Uизм.x и Uизм.y измерителей на входы интеграторов. Как известно (Чесноков А.А. Решающие усилители. - Л.: Энергия, 1969. - С.45) напряжение на выходе интегратора изменяется по закону: где A - коэффициент усиления интегратора в разомкнутом состоянии. Пусть скорость вращения вала опоры w = 100000об./мин. Тогда период вращения вала опоры а время tпер., за которое переменная составляющая измерителя величины зазора изменяется от среднего значения выходного напряжения измерителя до максимального значения Пусть амплитуда переменной составляющей на выходе измерителя Uпер.m, а допустимое значение отклонения выходных напряжений измерителей из-за некруглости вала от средних значений выходных напряжений, соответствующих данному положению оси вращения вала, равно DU. Тогда для расчета постоянной времени Tи интегратора можно воспользоваться выражением (6) На фиг.5 показаны выходные напряжения измерителей величин зазоров под датчиками C1 и C2 при самоцентрировавшемся вале и нулевом значении Pш = 0 радиальной составляющей силы шлифования. При подаче в момент времени t = 0 этих напряжений на входы интеграторов при достаточно большом Tи напряжения на их выходах достигнут значений Uинт.x = A × Uп.с.x и Uинт.y = A × Uп.с.y и не изменяются из-за некруглости вала. Выделяют постоянные составляющие напряжений на выходах измерителей при самоцентрировавшемся вале и запоминают их (на фиг.6 показана Uп.с.x). Выделив также переменные составляющие Uог.изм.x и Uог.изм.y выходных напряжений Uизм.x и Uизм.y измерителей (без сдвига по фазе) и, промодулировав ими постоянные составляющие Uп.с.x и Uп.с.y получают Теперь для получения разностности напряжения, по которому формируются сигналы управления на группы регуляторов давления, сравнивают Uоп.x и Uоп.y с выходными напряжениями измерителей Uизм.x и Uизм.y (фиг.6). При этом величина разностного сигнала уже не зависит от некруглости вала и определяется средними значениями (постоянными составляющими) напряжений Uп.с.x и Uп.с.y, которые соответствуют несмещенному и смещенному положению оси вращения вала по осям X и Y, соответственно. Если разностный сигнал не равен нулю, что свидетельствует о прецессии оси вращения вала под воздействием радиальной составляющей силы Pш шлифования, по приведенному выше правилу соответствующими группами регуляторов давления создают компенсирующий момент и предотвращают смещение оси вращения вала высокооборотной аэростатической шпиндельной опоры. В состав каждого регулятора давления входит пьезоэлектрический двигатель. Пьезоэлектрический двигатель регулятора давления из-за большой емкости между пьезоэлектрическими пластинами является апериодическим (инерционным) звеном устройства автоматического управления. Напряжение UПЭД на пьезоэлектрическом двигателе становится равным с погрешностью 0,01% приложенному к нему напряжению при ступенчатом изменении последнего с задержкой на время t = 6,2T по закону: где T - постоянная времени апериодического звена, что вносит дополнительную погрешность обработки шлифованием. Для повышения быстродействия регуляторов давления они могут оснащаться пропорциональным звеном, реализованным в виде коромысла, с установленной на нем регулировочной иглой (фиг.7). При коэффициенте передаточного звена, равном, например, n = 10, время запаздывания уменьшается на порядок. Изобретение поясняется чертежами, где на фиг.1 изображен общий вид заявляемого устройства (механическая часть) при использовании в высокооборотной аэростатической шпиндельной опоре; на фиг.2 - функциональная схема заявляемого устройства; на фиг.3 - иллюстрация принципа самоцентровки вала высокооборотной аэростатической шпиндельной опоры; на фиг.4 - иллюстрация принципа компенсации момента радиальной составляющей силы шлифования; на фиг.5 - эпюры напряжений на выходах измерителей смещения оси вращения вала по осям "X" и "Y" и интеграторов выходных напряжений измерителей величин смещения оси вращения вала по осям "X" и "Y"; на фиг.6 - эпюры формирования разностного сигнала (сигнала погрешности положения оси вращения вала) на входе дифференциального усилителя; на фиг.7 - вариант заявляемого устройства с быстродействующим регулятором давления (по п.2 формулы); на фиг.8 - вариант выполнения функциональной схемы блока выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала. Устройство компенсации гироскопического момента вала 1 высокооборотной шпиндельной опоры 2 (фиг.1, 2) включает датчик 3 величины смещения оси вращения вала по оси X и датчик 4 величины смещения оси вращения вала по оси Y, предназначенные для измерения величины смещения оси вращения вала 1 путем измерения величин зазоров между основаниями этих датчиков и поверхностью вала 1 опоры 2. Датчик 3 и датчик 4 установлены в сечении по C - C опоры 2 по полуосям "+X" и "+Y" неподвижной системы координат OXY, совмещенной с плоскостью сечения опоры 2 по C - C. Устройство компенсации гироскопического момента вала высокооборотной аэростатической шпиндельной опоры может быть использовано так же для компенсации гироскопического момента вала высокооборотной шпиндельной опоры на радиальных опорах качения. Причем, датчики 3 и 4 могут устанавливаться в отдельной обойме. В сечениях опоры 2 по A - A и B - B (фиг.1, 2) по внешним сторонам радиальной аэростатической опоры 5 размещены регуляторы 6 давления в зазоре 7 опоры 2, предназначенные для создания компенсирующего момента регуляторов давления, равного по величине и противоположного по направлению моменту , создаваемого приложенной к валу 1 радиальной составляющей силы шлифования Pш . Каждый регулятор 6 давления включает пьезоэлектрический двигатель 8 (ПЭД), на котором укреплена регулировочная игла 9, предназначенная для измерения давления на выходах жиклеров 10 с подводящими каналами регулируемого проходного сечения. В каждом упомянутом сечении опоры 2 (фиг.2) регуляторы 6 давления объединены в четыре группы, каждая из которых образует компенсатор смещения оси вращения вала. В сечении опоры 2 по A - A по осям систему координат OAXAYA размещены: по оси "+XA" - компенсатор 11 смещения оси вращения вала; по оси "-YA" - компенсатор 12 смещения оси вращения вала; по оси "-XA" компенсатор 13 смещения оси вращения вала; по оси "+UA" - компенсатор 14 смещения оси вращения вала. В сечении опоры 2 по B - B по осям системы OBXBYB размещены: по оси "+XB" - компенсатор 15 смещения оси вращения вала; по оси "-YB" - компенсатор 16 смещения оси вращения вала; по оси "-XB" компенсатор 17 смещения оси вращения вала; по оси "+YB" - компенсатор 18 смещения оси вращения вала. Компенсаторы 11 - 18 могут быть выполнены в отдельных обоймах, прикрепленных к корпусу шпиндельной опоры 2. Причем в каждом компенсаторе 11, 12, 13, 14, 15, 16, 17 и 18 смещения оси вращения вала 1 регуляторы 6 давления включены параллельно. Кроме того, каждый упомянутый компенсатор смещения оси вращения вала 1 размещен симметрично относительно оси соответствующей системы координат OAXAYA или OBXBYB, оси которых параллельны между собой. Измеритель 19 величины смещения оси вращения вала по оси "X" и измеритель 20 величины смещения оси вращения вала по оси "Y" предназначены для преобразования величин зазоров под датчиками 3 и 4 величины смещения оси вращения вала, соответственно, в напряжения Uизм.x и Uизм.y, соответствующие величинам этих зазоров. В качестве измерителей 19 и 20 могут использоваться измерители, приведенные в книге Гриневича Б.Ф. Измерительные компенсационно-мостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987. Переключатель 21 "опорное - работа" служит для коммутации сигналов измерителя 19 величины зазора по оси X и измерителя 20 величины зазора по оси Y. В положении "опорное" с помощью переключателя 21 выходы измерителей 19 и 20 подключены ко входам интеграторов 22 и 23 соответственно. Интегратор 22 выходного напряжения измерителя величины смещения оси вращения вала по оси "X" (Uизм.x) и интегратор 23 выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" (Uизм.y) служат для выделения постоянных составляющих выходных напряжений измерителей 19 и 20 величины смещения Uп.с.x и Uп.с.y, соответствующих несмещенному положению оси вращения вала 1, когда вал 1 самоцентрировался, а радиальная составляющая силы шлифования Pш = 0, то есть вращение вала происходит без смещения оси вращения. Этим исключается влияние некруглости вала 1 на положение оси вращения вала 1 в процессе компенсации радиальной нагрузки. Аналогоцифровой преобразователь 24 (АЦП24) и аналого-цифровой преобразователь 25 (АЦП25) предназначены для преобразования выходных напряжений интеграторов 22 и 23, равных постоянным составляющим измерителей 12 и 20, соответственно, в цифровые двоичные коды. В качестве АЦП24 и АЦП25 могут быть использованы, например, АЦП на базе микросхемы К572ПВ1 (Гутников B.C. Интегральная электроника в измерительных устройствах. - Л.: Энергоатомиздат, 1988. - С.239). Кнопка 26 "Старт" служит для запуска АЦП24 и АЦП25 путем подключения к ним в качестве сигнала запуска источника 27 постоянного напряжения. Схема 28 клапанов и схема 29 клапанов предназначены для записи по сигналам готовности АЦП24 и АЦП25, соответственно, двоичных кодов постоянных составляющих выходных напряжений измерителей 12 и 20 величины смещения оси вращения вала 1 с выходов этих АЦП24 и АЦП25 в регистр 30 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X" и в регистр 31 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y". Схема 32 задержки сигнала готовности и схема 33 задержки сигнала готовности обеспечивают задержку поступления сигналов готовности АЦП24 и АЦП25 на схемы 28 и 29 клапанов, необходимое для очистки резисторов 30 и 31 хранения кодов постоянных составляющих. В качестве схем 32 и 33 задержки сигнала готовности могут использоваться, например, линии задержки. Цифроаналоговый преобразователь 34 (ЦАП34) и цифроаналоговый преобразователь 35 (ЦАП35) предназначены для преобразования двоичных кодов постоянных составляющих, хранящихся в регистре 30 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X" и в регистре 31 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", соответственно, в соответствующие этим кодам напряжения. В качестве ЦАП34 и ЦАП35 могут использоваться ЦАП, выполненные, например, на базе микросхемы К594ПА1 (Гутников B.C. Интегральная электроника в измерительных устройствах. - Л.: Энергоатомиздат, 1988. - С.230). Блок 36 выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" и блок 37 выделения огибающей выходного напряжения измерителя величины смещения вращения вала по оси "Y" обеспечивают выделение огибающей (переменных составляющих) выходных напряжений Uог.изм."XC" и Uог.изм."YC" измерителей 19 и 20 величины смещения вала. Причем, амплитуды этих огибающих определяются исключительно величиной некруглости вала 1 опоры 2. Каждый блок 36 и 37 выделения огибающей включает (фиг.8) дифференцирующий RC - контур 38 постоянного тока, обеспечивающий выделение огибающей. Причем, передаточная функция контура где t - постоянная времени контура, а выделенные огибающие опережают по фазе огибающие выходные напряжения измерителей на величину Для совмещения по фазе огибающих на выходах блоков 36 и 37 с огибающими выходных напряжений измерителей 19 и 20 дифференцирующей RC-контур 38 нагружают на дифференцирующий трансформатор 39 (фиг.8), обеспечивающий запаздывание по фазе на Y(w ). Для обеспечения режима холостого хода дифференцирующего трансформатора его нагружают на катодный повторитель 40 (Зайцев Г.Ф. Основы теории систем автоматического регулирования и управления. - Т.II. Изд-во КВИРТУ ПВО, 1963. - С.61 - 65). Усилитель 41 служит для выравнивании амплитуд огибающих на выходах блоков 36 и 37 и огибающих выходных напряжений измерителей 19 и 20. Блок 42 формирования опорного напряжения несмещенного положения оси вращения вала 1 по оси "X" и блок 43 формирования опорного напряжения несмещенного положения оси вращения вала 1 по оси "Y" предназначены для формирования опорных напряжений Uоп.x и Uоп.y (фиг.6), соответствующих несмещенному положению оси вращения вала 1. В качестве блоков 42 и 53 могут использоваться алгебраические сумматоры электрических аналоговых сигналов (Ялышева А.У. и др. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981. - С.158). Выходные сигналы блоков 42 и 43 соответствуют выражениям Дифференциальный усилитель 44 сигнала погрешности положения оси вращения вала по оси "X" Uразн.x = Uизм.x - Uоп.x и дифференциальный усилитель 45 сигнала погрешности положения оси вращения вала по оси "Y" Uразн.y = Uизм.y - Uоп.y предназначены для формирования сигналов управления на компенсаторы 11, 12, 13, 14, 15, 16, 17 и 18 смещения оси вращения вала 1 опоры 2, пропорциональных величине смещения оси вращения вала 1 по осям X и Y системы координат OXY относительно несмещенного положения вала 1 (положения оси вращения самоцентрировавшегося вала 1), обеспечивающих возврат оси вращения вала 1 в несмещенное положение. Причем датчик 3 величин смещения оси вращения вала по оси "X" соединен с входом измерителя 19 величины смещения оси вращения вала по оси "X", выход измерителя 19 величины смещения оси вращения вала по оси X через переключатель 23 "опорное - работа" в положении "опорное" соединен с входом интегратора 22 выходного напряжения измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с информационным входом аналого-цифрового преобразователя 24, информационный выход аналого-цифрового преобразователя 24 соединен с информационным входом схемы 28 клапанов, сигнальный выход аналого-цифрового преобразователя 24 соединен с входом схемы 32 задержки сигнала готовности и с сигнальным входом регистра 30 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X", выход схемы 32 задержки сигнала готовности соединен с сигнальным входом схемы 28 клапанов, выход схемы 28 клапанов соединен с информационным входом регистра 30 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X", а его выход соединен с входом цифроаналогового преобразователя 34, выход цифроаналогового преобразователя 34 соединен с первым входом блока 42 формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", а его выход соединен с первым входом дифференциального усилителя 44 сигнала погрешности положения оси вращения вала по оси "X", выход измерителя 19 величины смещения оси вращения вала по оси "X" через переключатель 21 "опорное - работа" в положении "работа" соединен с входом блока 36 выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" и со вторым входом дифференциального усилителя 44 сигнала погрешности положения оси вращения вала по оси "X", выход блока 36 выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "X" соединен со вторым входом блока 42 формирования опорного напряжения несмещенного положения оси вращения вала по оси "X", датчик 4 величины смещения оси вращения вала по оси "Y" соединен с входом измерителя 20 величины смещения оси вращения вала по оси "Y", выход измерителя 20 величины смещения оси вращения вала по оси "Y" через переключатель 21 "опорное работа" в положений "опорное" соединен с входом интегратора 23 выходного напряжения измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с информационным входом аналого-цифрового преобразователя 25, информационный выход аналого-цифрового преобразователя 25 соединен с информационным входом схемы 29 клапанов, сигнальный выход аналого-цифрового преобразователя 25 соединен с входом схемы 33 задержки сигнала готовности и с сигнальным входом регистра 31 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", выход схемы 33 задержки сигнала готовности соединен с сигнальным входом схемы 29 клапанов, выход схемы 29 клапанов соединен с информационным входом регистра 31 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y", а его выход соединен с входом цифроаналогового преобразователя 35, выход цифроаналогового преобразователя 35 соединен с первым входом блока 43 формирования опорного напряжения несмещенного положения оси вращения вала по оси "Y", a его выход соединен с первым входом дифференциального усилителя 45 сигнала погрешности положения оси вращения вала по оси "Y", выход измерителя 20 величины смещения оси вращения вала по оси "Y" через переключатель 21 "опорное - работа" в положении "работа" соединен с входом блока 37 выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" и со вторым входом дифференциального усилителя 45 сигнала погрешности положения оси вращения вала по оси "Y", выход блока 37 выделения огибающей выходного напряжения измерителя величины смещения оси вращения вала по оси "Y" соединен со вторым входом блока 43 формирования опорного напряжения несмещенного положения оси вращения вала по оси "Y", первый выход дифференциального усилителя 44 сигнала погрешности положения оси вращения вала по оси "X" соединен с компенсатором 14 смещения оси вращения вала, установленным по оси "+YA" и с компенсатором 16 смещения оси вращения вала, установленным по оси "-YB", а его второй выход соединен с компенсатором 12 смещений оси вращения вала, установленным по оси "-YA" и с компенсатором 18 смещения оси вращения вала, установленным по оси "+YB", первый выход дифференциального усилителя 45 сигнала погрешности положения оси вращения вала по оси "Y" соединен с компенсатором 11 смещения оси вращения вала, установленным по оси "+XA" и с компенсатором 17 смещения оси вращения вала, установленным по оси "-XB", а его второй выход соединен с компенсатором 13 смещения оси вращения вала, установленным по оси "-XA" и с компенсатором 15 смещения оси вращения вала, установленным по оси "+XB", источник 27 постоянного напряжения соединен с кнопкой 26 "Старт", кнопка 26 "Старт" соединена с сигнальным входом аналого-цифрового преобразователя 24 и с сигнальным входом аналогоцифрового преобразователя 25. Работает устройство компенсации гироскопического момента вала 1 высокооборотной аэростатической шпиндельной опоры 2 следующим образом. Задают валу 1 опоры 2 вращения с номинальной скоростью. Переключатель 21 "опорное - работа" устанавливают в положение "опорное". Величины зазоров под датчиком 3 величины смещения оси вращения вала по оси "X" и под датчиком 4 величины смещения оси вращения вала по оси "Y" измерителями 19 и 20 величин смещения вала по осям "X" и "Y", соответственно, постоянно преобразуются в напряжения, соответствующие величинам этих зазоров, которые через переключатель 21 "опорное - работа" в положение "опорное" поступают на входы интеграторов 22 и 23 выходных напряжений измерителей величин смещения оси вращения вала по осям "X" и "Y" соответственно. После выхода вала 1 на номинальную скорость вращения и самоцентровки, напряжения, снимаемые с нагрузок интеграторов 22 и 23, равные постоянным составляющим выходных напряжений измерителей 19 и 20 величин смещения вала по осям "X" и "Y" и соответствуют положению оси вращения самоцентривовавшегося вала 1, которое (при отсутствии радиальной составляющей силы шлифования) принимают в качестве невозмущенного положения вала 1 опоры 2. Напряжения с выходов интеграторов 22 и 23 поступают на информационные входы АЦП 24 и 25, соответственно. Нажимают кнопку 26 "Старт". Напряжение источника 27 постоянного напряжения через кнопку 26 "Старт" в качестве сигнала запуска поступает на сигнальные входы аналого-цифровых преобразователей 24 и 25. На выходах аналого-цифровых преобразователей 24 и 25 формируются двоичные коды постоянных составляющих выходных напряжений измерителей 19 и 20 величины смещения оси вращения вала по осям "X" и "Y", соответствующие невозмущенному положению оси вращения вала 1 опоры 2. В момент времени окончания преобразования напряжений постоянных составляющих измерителей 19 и 20 смещения оси вращения вала на специальных выходах АЦП 24 и 25 появляются сигналы готовности. Сигнал готовности с выхода аналого-цифрового преобразователя 24 поступает на сигнальный вход регистра 30 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "X" и устанавливает его в "ноль", а также через схему 32 задержки сигнала готовности поступает на сигнальный вход схемы 28 клапанов. В результате двоичный код постоянной составляющей измерителя 19 величины смещения вала по оси "X" с выхода аналого-цифрового преобразователя 24 через схему 28 клапанов поступает в регистр 30 хранения кода постоянной составляющей. Сигнал готовности с выхода аналого-цифрового преобразователя 24 поступает на сигнальный вход регистра 31 хранения кода постоянной составляющей измерителя величины смещения оси вращения вала по оси "Y" и устанавливает его в "ноль", а также через схему 33 задержки сигнала готовности поступает на сигнальный вход схемы 29 клапанов. В результате двоичный код постоянной составляющей измерителя 20 величины смещения оси вращения вала по оси "Y" с выхода аналого-цифрового преобразователя 25 через схему 29 клапанов поступает в регистр 31 хранения кода постоянной составляющей. С выходов регистров 30 и 31 двоичные коды постоянных составляющих поступают на входы цифроаналоговых преобразователей 34 и 35, соответственно. С выходов цифроаналоговых преобразователей 34 и 35 постоянные напряжения, соответствующие невозмущенному положению оси вращения самоцентрировавшегося вала 1 поступают на первые входы блоков 42 и 43 формирования опорного напряжения несмещенного положения оси вращения вала по оси "X" и по оси "Y", соответственно. Переключатель 21 "опорное - работа" устанавливают в положение "работа". В положении переключателя 21 "работа" выходы измерителей 19 и 20 величин смещения оси вращения вала по осям "X" и "Y" поступают на входы блоков 36 и 37 выделения огибающих выходных напряжений измерителей величин смещения оси вращения по осям "X" и "Y" и на вторые входы дифференциальных усилителей 44 и 45 сигналов погрешностей положения оси вращения вала по осям "X" и "Y", соответственно. С выходов блоков 36 и 37 огибающие выходных напряжений измерителей 19 и 20, амплитуды которых определяются величиной некруглости вала, поступают на вторые входы блоков 42 и 43 формирования опорных напряжений несмещенного положения оси вращения вала по осям "X" и "Y" соответственно. Опорные напряжения с выходов блоков 42 и 43 поступают на первые входы дифференциальных усилителей 44 и 45 сигналов погрешностей положения оси вращения вала по осям "X" и "Y", соответственно. При отсутствии радиальной нагрузки на вал 1 высокооборотной аэростатической шпиндельной опоры 2 величины опорных напряжений на первых входах дифференциальных усилителей 44 и 45 равны напряжениям на их вторых входах, поступающих с измерителей 19 и 20 величин смещения оси вращения вала по осям "X" и "Y", соответственно. Следовательно разность потенциалов между первыми и вторыми выходами дифференциальных усилителей 44 и 45, прикладываемая к соответствующим компенсаторам смещения оси вращения вала 1, равна нулю, т.е. сигналы управления положением оси вращения вала 1 по осям "X" и "Y" равны нулю. Пусть радиальная составляющая Pш силы шлифования, воздействующая на вал 1 в момент времени начала шлифования, приложена к шлифовальной головке (фиг.1) и направлена в направлении "-X" системы координат OXY. Под воздействием момента сила Pш ось вращения вала 1 опоры 2 будет поворачиваться в плоскости действия момента , которая перпендикулярна плоскости, проходящей через линию действия силы Pш и центр тяжести вала "q" (фиг.4). В результате зазор под датчиком 4 величины смещения оси вращения вала по оси "Y" будет увеличиваться. Поэтому увеличится напряжение на выходе измерителя 20 величины смещения оси вращения вала по оси "Y". Под воздействием разностного сигнала (фиг.6) между выходами дифференциального усилителя 45 сигнала погрешности положения оси вращения вала по оси "Y" возникнет разность потенциалов, которая поступает на компенсаторы 11, 13, 15 и 17 смещения оси вращения вала, установленные по осям "XA", "-XA", "XB" и "-XB" (фиг.2), соответственно. Полярность подключения компенсаторов 11 и 13 к дифференциальному усилителю 45 такая, что сила давления на вал 1 компенсатора 11 смещения оси вращения вала увеличится, а сила давления на вал 1 компенсатора 13 смещения оси вращения вала уменьшится. В результате компенсаторы 11 и 13, установленные в сечении вала 1 по A - A создают силу давления Pk на вал 1, действующую в направлении полуоси "+XA" системы координат OAXAYA (фиг.2). Полярность подключения компенсаторов 15 и 17 к дифференциальному усилителю 45 такая, что сила давления на вал 1 компенсатора 15 смещения оси вращения вала увеличится, а сила давления на вал 1 компенсатора 17 смещения оси вращения вала уменьшится. В результате компенсаторы 15 и 17, установленные в сечении вала 1 по B - B создают силу давления Pk на вал 1, действующую в направлении полуоси "-XB" системы координат OBXBYB (фиг.2). Пара сил Pk1 и Pk2 создает компенсирующий момент Mk, равный по величине и противоположный по направлению моменту радиальной составляющей Pш силы шлифования. Смещение оси вращения вала 1 опоры 2 под воздействием радиальной составляющей силы шлифования будет предотвращено. Величина смещения погрешности положения оси вращения вала 1 опоры 2 из несмещенного положения в сечении вала 1 по оси C - C под воздействием радиальной составляющей силы шлифования определяется чувствительностью измерителей 19 и 20 величин смещения оси вращения вала по осям "X" и "Y" и коэффициентом усиления устройства в разомкнутом состоянии и может не превышать 0,03мкм. В том случае, если радиальная составляющая Pш силы шлифования невелика и для создания компенсирующего момента достаточно иметь компенсаторы 11, 12, 13 14 смещения оси вращения вала, установленные в сечении по A - A опоры 2, компенсаторы 15, 16, 17, 18 в сечении опоры 2 по B - B не устанавливают. При этом функциональная схема устройства (фиг.2) никаких изменений не претерпевает. Как упоминалось при рассмотрении причинно-следственных связей, пьезоэлектрические двигатели 8 регуляторов 6 давления являются апериодическим звеном устройства автоматического управления. Для повышения быстродействия регуляторов 6 давления установленных в сечениях по A - A и B - B опоры 1, они могут оснащаться пропорциональным звеном, реализованным (фиг.7) в виде коромысла 46, установленного в камере наддува регулятора 6 давления на стойке 47 с возможностью поворота вокруг оси 48. Причем, регулировочные иглы 9 укреплены на коромыслах 46 напротив подводящих каналов жиклеров 10, а на пьезоэлектрических двигателях 8 установлены толкатели 49. Постоянное прилегание коромысел 46 к толкателям 49 обеспечивается пружинами 50. Точка упора толкателя 49 в коромысло 46 делит расстояние между осью симметрии регулировочной иглы 9 и осью 48 в заданном соотношении "K". Следовательно, быстродействие регулятора давления повышается в "K" раз. Коромысло 46, установленное с возможностью поворота на стойке 47, пьезоэлектрический двигатель 8, толкатель 49, регулировочная игла 9 и жиклер 10 образуют быстродействующий регулятор 51 давления в зазоре 7 опоры 2. Причем, быстродействующие регуляторы давления, как и обычные регуляторы 6 давления могут устанавливаться по обеим сторонам опоры 2 (фиг.7) или только с одной стороны опоры 2, прилегающей к шлифовальному инструменту 52.
ДивитисяДодаткова інформація
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: аеростатичної, наприклад, вала, опори, пристрій, обертового, елемента, шпиндельної, компенсації, моменту, гіроскопічного
Код посилання
<a href="https://ua.patents.su/13-25540-pristrijj-kompensaci-giroskopichnogo-momentu-obertovogo-elementa-napriklad-vala-aerostatichno-shpindelno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори</a>
Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори
Номер патенту: 25727
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B23B 19/00, F16C 32/06
Мітки: навантажень, вал, радіальної, радіальних, пристрій, компенсації, аеростатичної, опори
Формула / Реферат:
Устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры, включающее электрически связанные между собой датчики величин зазоров, измерители величин зазоров, дифференциальные усилители сигналов рассогласования, регуляторы давления, отличающееся тем, что оно снабжено компенсаторами радиального смещения оси вращения вала радиальной аэростатической опоры, расположенными по внешним сторонам системы питающих сопел...
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: пристрій, стабілізації, аеростатичної, елемента, положення, рухомого, плоскої, опори
Формула / Реферат:
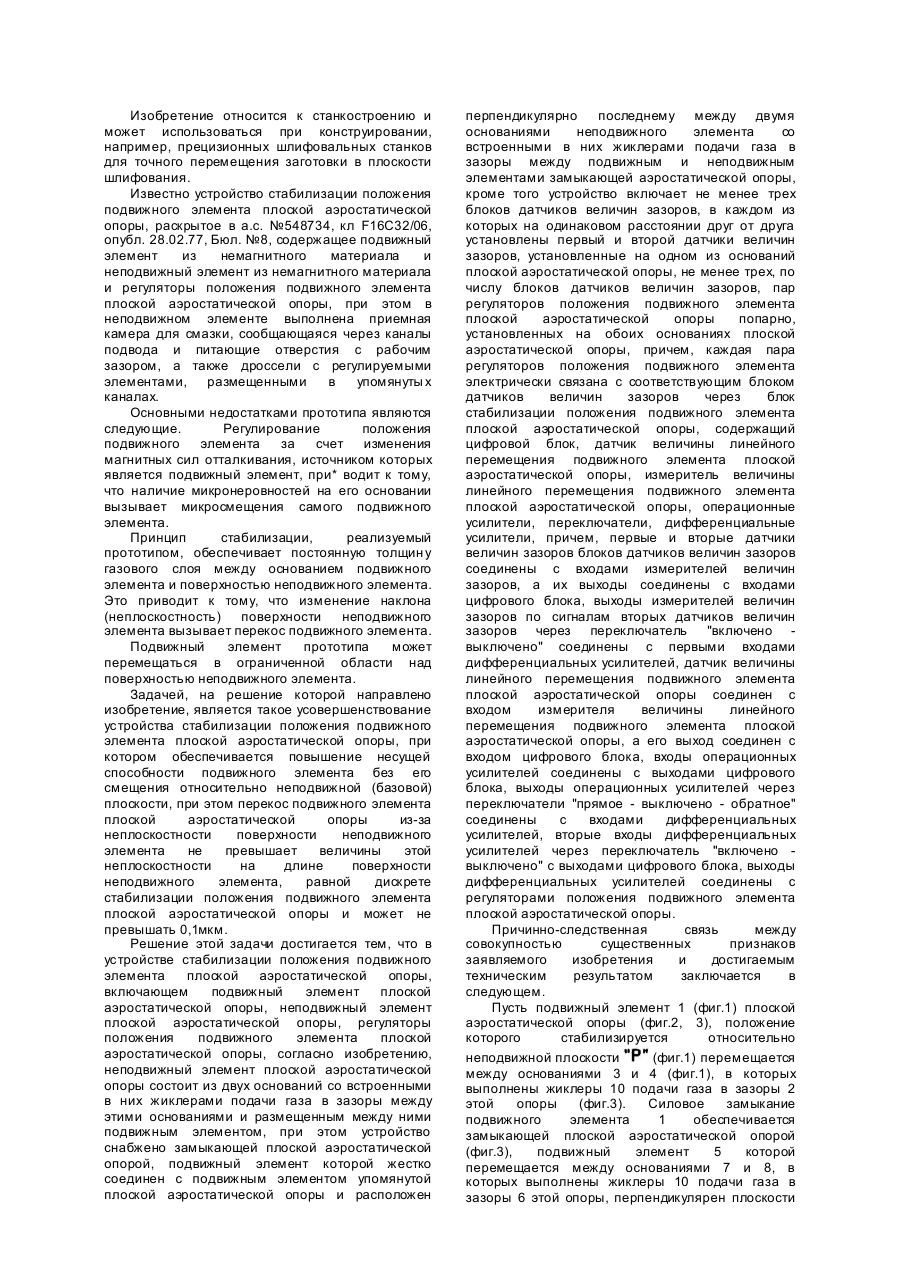
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: спосіб, аеростатичної, пристрій, напрямної, стабілізації, елемента, положення, здійснення, рухомого
Формула / Реферат:
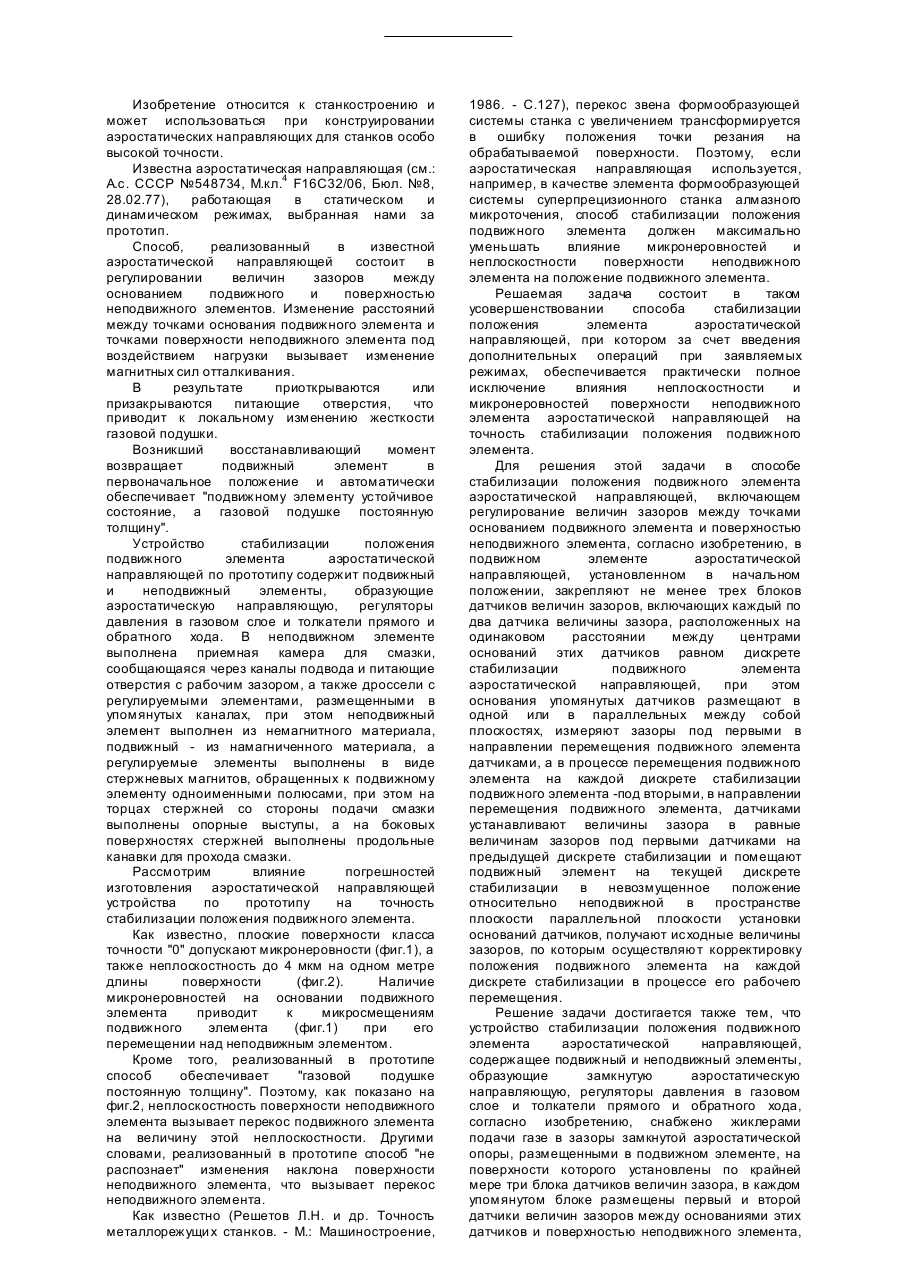
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Пристрій для стабілізації швидкості обертання ведучого вала стрічкопротяжного механізму магнітофона

Номер патенту: 11689
Опубліковано: 25.12.1996
Автор: Юрасов Віктор Семенович
МПК: G11B 15/43
Мітки: швидкості, магнітофона, механізму, обертання, стабілізації, ведучого, стрічкопротяжного, пристрій, вала
Формула / Реферат:
Устройство для стабилизации частоты вращения ведущего вала лентопротяжного механизма магнитофона, содержащее источник питания и последовательно соединенные частотный дискриминатор, усилитель-преобразователь, усилитель мощности и электродвигатель, ротор которого кинематически связан с ведущим валом и измерителем частоты вращения, отличающееся тем, что, с целью повышения точности стабилизации частоты вращения ведущего вала, в него введены...
Ущільнення обертового вала шестеренної гідромашини
Номер патенту: 959
Опубліковано: 15.12.1993
Автори: Лесючок Вадим Іванович, Аскері Мухамед Алі син Наги, Переверзєв Олександр Іванович
МПК: F16J 15/32
Мітки: обертового, вала, ущільнення, шестеренної, гідромашини
Формула / Реферат:
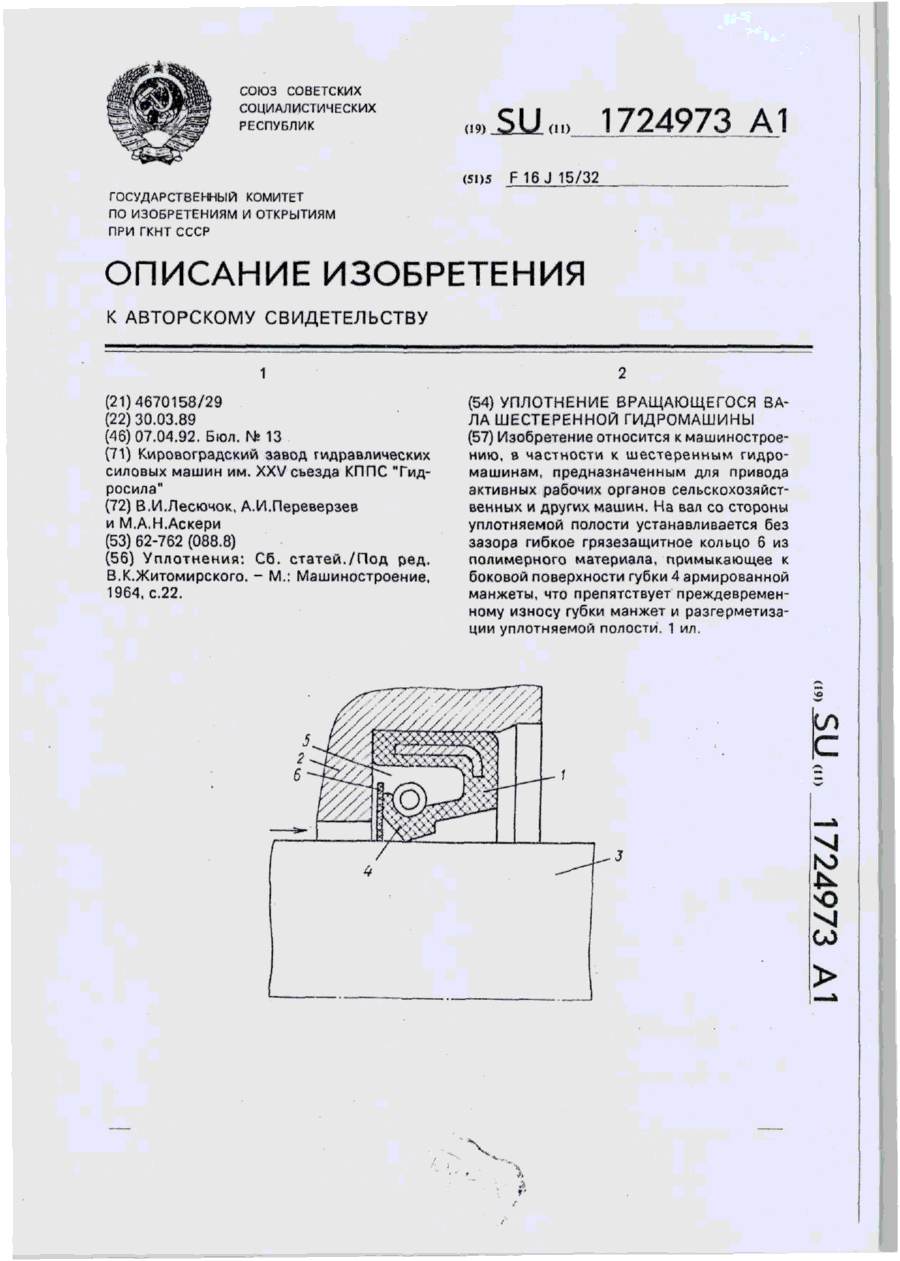
Формула изобретенияУплотнение вращающегося вала шестеренной гидромашины, содержащее уплотнительную манжету, установленную в корпусе, и неподвижное грязезащитное кольцо, отличающееся тем, что, с целью повышения надежности работы уплотнения, грязезащитное кольцо выполнено гибким из полимерного материала и установлено без зазора относительно вала со стороны уплотнительной полости касательно к боковой поверхности губки манжеты.
Попередній патент: Спосіб отримання резорбтивного шовного матеріалу
Наступний патент: Спосіб обробки бочкоподібних зубців
Випадковий патент: Спосіб виготовлення грибного супу з лапшою