Відмовостійкий блок акселерометрів
Номер патенту: 47348
Опубліковано: 25.01.2010
Автори: Златкін Олег Юрійович, Давидов Дмитро Володимирович, До Куок Туан, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Бандура Іван Миколайович, Федорчук Ігор Володимирович


Формула / Реферат
Відмовостійкий блок акселерометрів, що складається з трьох акселерометрів, чутливі осі двох з них співпадають з двома осями ортогональної системи координат, який відрізняється тим, що вісь третього акселерометра складає з третьою ортогональною віссю кут 60° у площині XOY, у нього додатково введені два акселерометри, осі яких спрямовані з початку координат по діагоналі куба в 2 та 4 октанти відповідно, виходи акселерометрів послідовно підключені до аналого-цифрових перетворювачів, блока діагностування та блока формування уявних прискорень.
Текст
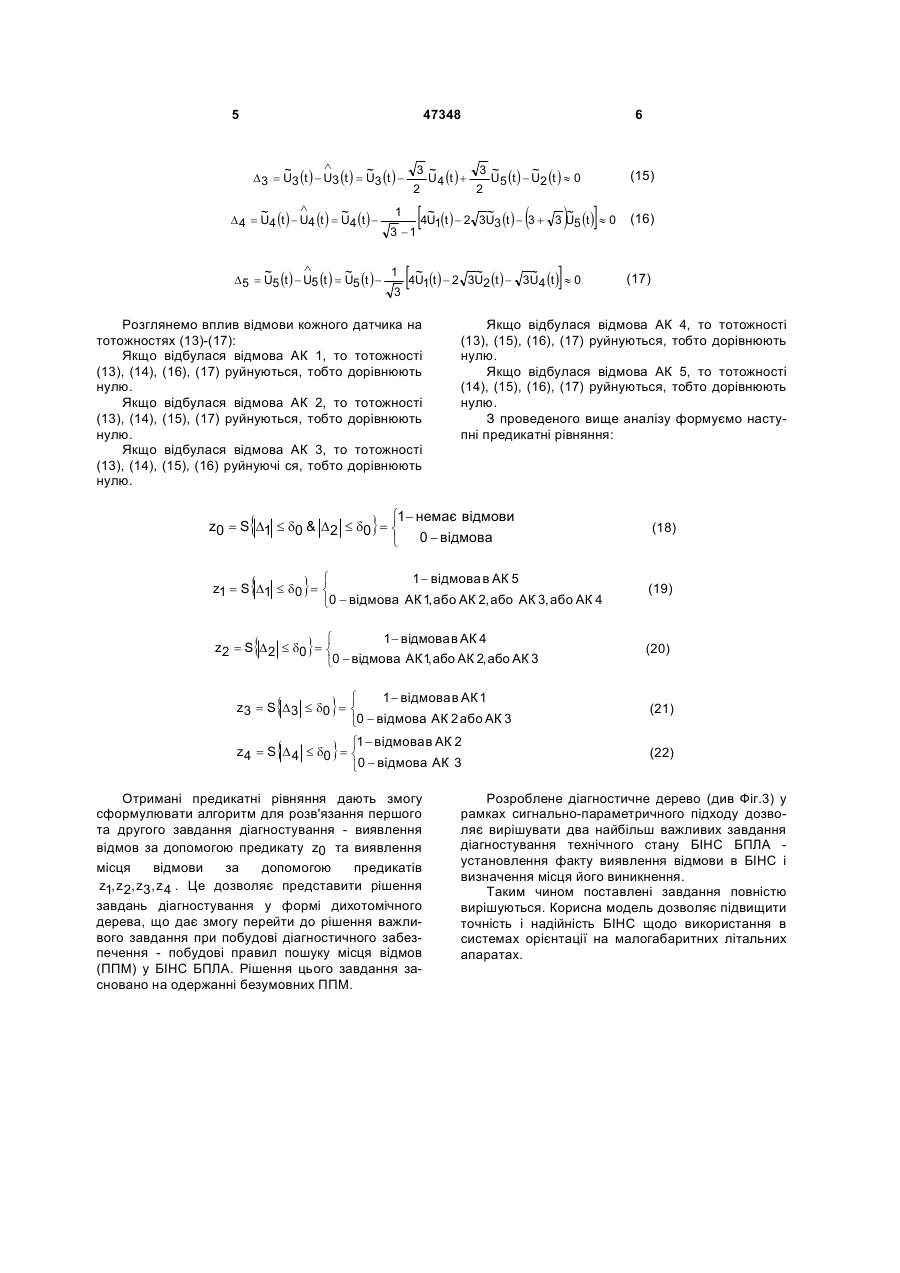
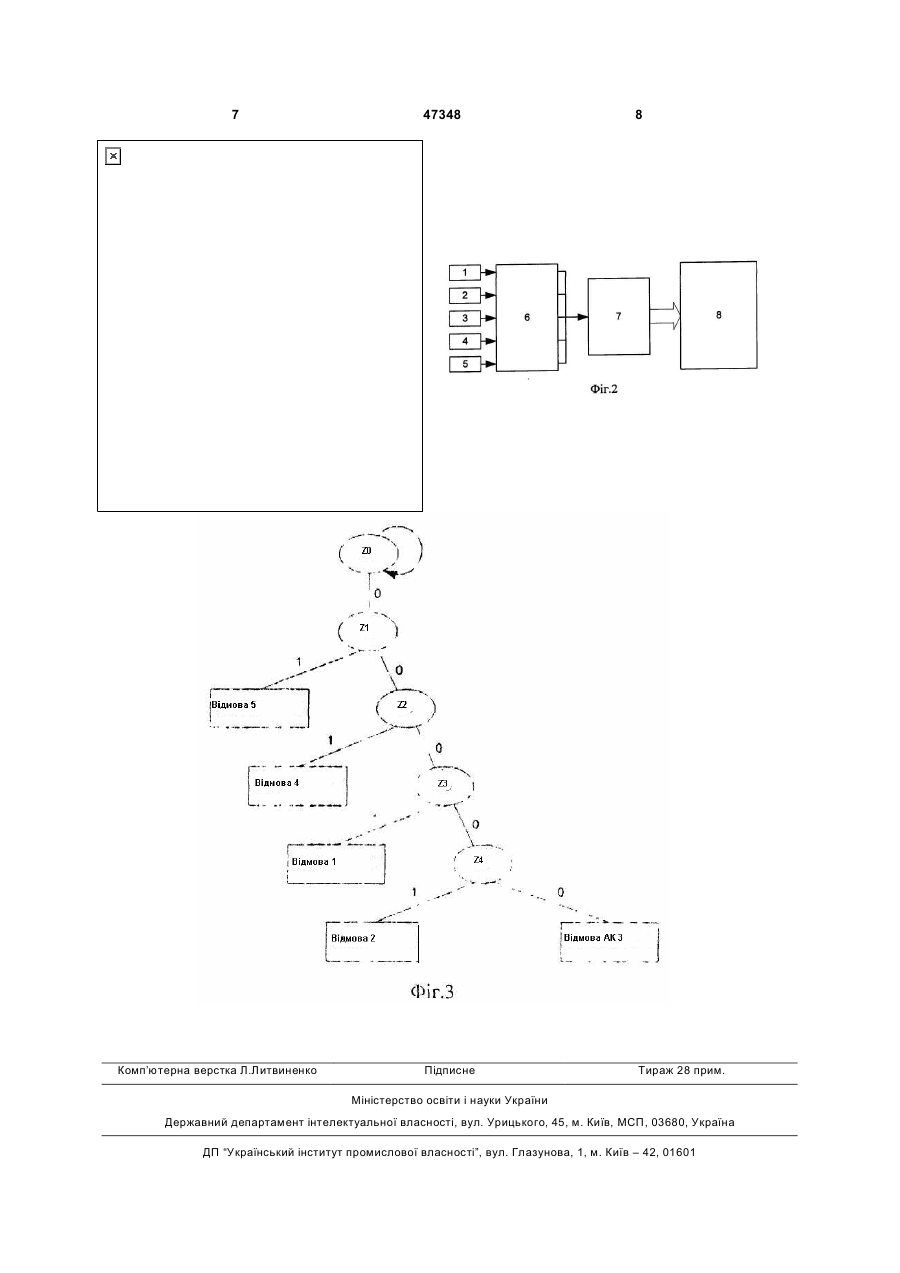
Відмовостійкий блок акселерометрів, що складається з трьох акселерометрів, чутливі осі двох з них співпадають з двома осями ортогональної системи координат, який відрізняється тим, що вісь третього акселерометра складає з третьою ортогональною віссю кут 60° у площині XOY, у нього додатково введені два акселерометри, осі яких спрямовані з початку координат по діагоналі куба в 2 та 4 октанти відповідно, виходи акселерометрів послідовно підключені до аналогоцифрових перетворювачів, блока діагностування та блока формування уявних прискорень. (19) (21) u200908619 (22) 17.08.2009 (24) 25.01.2010 (46) 25.01.2010, Бюл.№ 2, 2010 р. (72) КУЛІК АНАТОЛІЙ СТЕПАНОВИЧ, ФІРСОВ СЕРГІЙ МИКОЛАЙОВИЧ, ЗЛАТКІН ОЛЕГ ЮРІЙОВИЧ, БАНДУРА ІВАН МИКОЛАЙОВИЧ, ДАВИДОВ ДМИТРО ВОЛОДИМИРОВИЧ, ФЕДОРЧУК ІГОР ВОЛОДИМИРОВИЧ, ДО КУОК ТУАН (73) НАЦІОНАЛЬНИЙ АЕРОКОСМІЧНИЙ УНІВЕРСИТЕТ ІМ. М.Є.ЖУКОВСЬКОГО "ХАРКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ" 3 47348 ì 1 3 ay (t ) + 0az (t ) ï U1(t ) = ax (t ) + 2 2 ï U2 (t ) = 0ax (t ) + 1ay (t ) + 0az (t ) ï ï U3 (t ) = 0ax (t ) + 0ay (t ) + 1az (t ) ï í ïU4 (t ) = 1 ax (t ) - 1 a y (t ) + 1 az (t ) ï 3 3 3 ï 1 1 1 ïU5 (t ) = ax (t ) + a y (t ) az (t ) ï 3 3 3 î А 2 = (U1,U2 , U4 ); А7 = (U1, U3 , U4 ); А 3 = (U1,U2 , U5 ); А8 = (U1, U3 , U5 ); А 4 = (U2, U3, U4 ); А 9 = (U1, U4 , U5 ); З (5) видно, що всі визначники матриці не дорівнюють нулю, тобто даний блок, який складається з п'яти датчиків, може бути повністю діагностований. Для розрахунку запропонованої корисної моделі складемо логічну таблицю для формування предикатів діагностування. Ми можемо скласти 5 множин рівнянь, причому з кожної множини можна формулювати показники з одного датчика через всі інші з другої множини. Позначимо такі множини як S1 = (U1, U2, U3, U4 ); (1) де a x (t ), a y (t ), a z (t ) - проекції уявлених прискорень обертання на осі зв'язаної системи координат. Із систем рівнянь (1) перепишемо в вигляді матричного добутку: é 1 ù 3 0 ú ê 2 ú é U1(t ) ù ê 2 1 0 ú éa (t )ù ú ê 0 ê x U2 (t )ú ê ê 0 0 1 ú êa (t )ú (2) úê y ú êU3 (t )ú = ê 1 1 1 ú êa (t )ú êU4 (t )ú ê 3 3 úë z û êU (t )ú ê 3 ë 5 û ê 1 1 1 ú ê ú ê 3 3 3ú ë û Позначимо: é 1 ù 3 0 ú ê 2 ê 2 ú 1 0 ú ê 0 ê 0 1 ú K=ê 0 (3) 1 1 1 ú ê ú ê 3 3 3 ú ê 1 1 1 ú ê ú ê 3 3 3ú ë û Дослідимо дану матрицю по критерію повного діагностування. З (3) видно, що всі рядки матриці К лінійно незалежні, тобто потрібно перевірити другу умову для всіх симетричних матриць А (3 ´ 3) з матриці К. 5! Маємо C3 = матриць A i, i = 1..10 . 5 3!2! = 10 Розглянемо ці матриці: A1 = (U1, U2, U3 ); А 6 = (U3 , U4 , U5 ); (4) S2 = (U1, U2 , U3 , U5 ); S3 = (U2, U3 , U4 , U5 ); S4 = (U1, U3 , U4 , U5 ); S5 = (U1, U2 , U4 , U5 ); З (8) випливає: 1 1 1 U4 (t ) = 2U1(t ) - 3U2 (t ) U2 (t ) + U3 (t ) (9) 3 3 3 Або 1 U1(t ) = 3U4 (t ) + ( 3 + 1)U2 (t ) - U3 (t ) (10) 2 З (10) можна позначити як оцінне значення по датчику АК 1, тобто Ù 1 ~ ~ ~ (11) U1(t ) = 3U4 (t ) + ( 3 + 1)U2 (t ) - U3 (t ) 2 Значить якщо всі датчики справні, то [ ] [ ] [ ] ~ [ 3U4 (t) + ( ] ~ ~ 3 + 1)U2 (t ) - U3 (t ) » 0 ;(12) Аналогічно ведуться розрахунки для чотирьох інших множин S2, S3, S4 та S5 . Після проведених розрахунків отримаємо: det (A 2 ) = 0.2887; det (A 7 ) = 0.7887; Ù 1 ~ ~ D1 = U1(t ) - U1(t ) = U1(t ) 2 (6) Розглянемо множину S1 = (U1, U2, U3, U4 ) ; Складемо систему рівнянь: ì 1 3 a y (t ) + 0a z (t ) ï U1(t ) = a x (t ) + 2 2 ï U2 (t ) = 0a x (t ) + 1a y (t ) + 0a z (t ) ï (7) í U3 (t ) = 0a x (t ) + 0a y (t ) + 1a z (t ) ï 1 1 1 ï a x (t ) a y (t ) + a z (t ) ïU4 (t ) = 3 3 3 î З системи рівнянь (7) маємо: ì a x (t ) = 2U1(t ) - 3U2 (t ) ï a y (t ) = U2 (t ) ï ï (8) í az (t ) = U3 (t ) ï 1 1 1 ïU4 (t ) = ax (t ) a y (t ) + az (t ) ï 3 3 3 î Ù 1 ~ ~ U1(t ) - U1(t ) = U1(t ) 2 А 5 = (U2, U3 , U5 ); A10 = (U2 , U4 , U5 ); Розрахуємо визначник кожної матриці: det (A1) = 0.5; det (A 6 ) = 0.667; det (A 3 ) = -0.2887; det (A 8 ) = 0.2113; det (A 4 ) = 0.5774; det (A 9 ) = 0.5774; det (A 5 ) = 0.2887; det (A10 ) = 0 .6667 . 4 (5) ~ [ 3U4 (t ) + ( Ù ~ ~ D2 = U2 (t ) - U2 (t ) = U2 (t ) 1 1- 3 ] ~ ~ 3 + 1)U2 (t ) - U3 (t ) » 0 ~ ~ ~ [ 3U5 (t ) - 2U1(t ) + U3 (t )] » 0 (13) (14) 5 47348 6 Ù ~ ~ 3~ 3~ ~ U4 (t ) + U5 (t ) - U2 (t ) » 0 D3 = U3 (t ) - U3 (t ) = U3 (t ) 2 2 Ù ~ ~ ~ ~ ~ 1 4U1(t ) - 2 3U3 (t ) - 3 + 3 U5 (t ) » 0 D 4 = U4 (t ) - U4 (t ) = U4 (t ) 3 -1 [ ) ] ( [ ] Ù 1 ~ ~ ~ ~ ~ D5 = U5 (t ) - U5 (t ) = U5 (t ) 4U1(t ) - 2 3U2 (t ) - 3U4 (t ) » 0 3 Розглянемо вплив відмови кожного датчика на тотожностях (13)-(17): Якщо відбулася відмова АК 1, то тотожності (13), (14), (16), (17) руйнуються, тобто дорівнюють нулю. Якщо відбулася відмова АК 2, то тотожності (13), (14), (15), (17) руйнуються, тобто дорівнюють нулю. Якщо відбулася відмова АК 3, то тотожності (13), (14), (15), (16) руйнуючі ся, тобто дорівнюють нулю. (15) (16) (17) Якщо відбулася відмова АК 4, то тотожності (13), (15), (16), (17) руйнуються, тобто дорівнюють нулю. Якщо відбулася відмова АК 5, то тотожності (14), (15), (16), (17) руйнуються, тобто дорівнюють нулю. З проведеного вище аналізу формуємо наступні предикатні рівняння: ì1- немає відмови z0 = S D1 £ d0 & D2 £ d0 = í î 0 - відмова (18) 1 - відмова в АК 5 ì z1 = S D1 £ d0 = í 0 - відмова АК 1, або АК 2, або АК 3, або АК 4 î (19) 1 - відмова в АК 4 ì z2 = S D 2 £ d0 = í 0 - відмова АК 1 або АК 2, або АК 3 , î (20) { } { } { } 1 - відмова в АК 1 ì z3 = S D3 £ d0 = í 0 - відмова АК 2 або АК 3 î ì1 - відмова в АК 2 z4 = S D 4 £ d0 = í î0 - відмова АК 3 { } (21) { } (22) Отримані предикатні рівняння дають змогу сформулювати алгоритм для розв'язання першого та другого завдання діагностування - виявлення відмов за допомогою предикату z0 та виявлення місця відмови за допомогою предикатів z1, z2, z3, z 4 . Це дозволяє представити рішення завдань діагностування у формі дихотомічного дерева, що дає змогу перейти до рішення важливого завдання при побудові діагностичного забезпечення - побудові правил пошуку місця відмов (ППМ) у БІНС БПЛА. Рішення цього завдання засновано на одержанні безумовних ППМ. Розроблене діагностичне дерево (див Фіг.3) у рамках сигнально-параметричного підходу дозволяє вирішувати два найбільш важливих завдання діагностування технічного стану БІНС БПЛА установлення факту виявлення відмови в БІНС і визначення місця його виникнення. Таким чином поставлені завдання повністю вирішуються. Корисна модель дозволяє підвищити точність і надійність БІНС щодо використання в системах орієнтації на малогабаритних літальних апаратах. 7 Комп’ютерна верстка Л.Литвиненко 47348 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFailure-stable block of accelerometers
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Zlatkin Oleh Yuriiovych, Bandura Ivan Mykolaiovych, Davydov Dmytro volodymyrovych, Fedorchuk Ihor Volodymyrovych, Do Kuok Tuan
Назва патенту російськоюОтказоустойчивый блок акселерометров
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Златкин Олег Юрьевич, Бандура Иван Николаевич, Давыдов Дмитрий Владимирович, Федорчук Игорь Владимирович, До Куок Туан
МПК / Мітки
МПК: G01C 21/00
Мітки: акселерометрів, блок, відмовостійкий
Код посилання
<a href="https://ua.patents.su/4-47348-vidmovostijjkijj-blok-akselerometriv.html" target="_blank" rel="follow" title="База патентів України">Відмовостійкий блок акселерометрів</a>
Відмовостійкий блок акселерометрів

Номер патенту: 36546
Опубліковано: 27.10.2008
Автори: Златкін Олег Юрійович, Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Аблаєв Тімур Асанович
МПК: G01C 21/00
Мітки: блок, відмовостійкий, акселерометрів
Формула / Реферат:
Відмовостійкий блок акселерометрів, що складається з акселерометрів, три з яких розташовані у вигляді правильної трикутної піраміди, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що четвертий акселерометр розташований по діагоналі куба на відстані , де
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 45149
Опубліковано: 26.10.2009
Автори: Фірсов Сергій Миколайович, Челядін В'ячеслав Олександрович, Златкін Олег Юрійович, Сухіцький Ігор Володимирович, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: G01C 21/00
Мітки: кутових, швидкостей, відмовостійкий, датчиків, блок
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі перших двох датчиків кутових швидкостей співпадають з двома осями ортогональної системи координат, який відрізняється тим, що додатково введені три датчики кутової швидкості, вісь третього датчика кутової швидкості направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого датчиків кутових швидкостей...
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 36480
Опубліковано: 27.10.2008
Автори: Златкін Олег Юрійович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Пилев Михайло Юрійович, Бандура Іван Миколайович
МПК: G01C 21/00
Мітки: блок, датчиків, кутових, швидкостей, відмовостійкий
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що додатково введений четвертий датчик кутової швидкості, розташований по діагоналі куба на відстані , де R - відстань від центру системи до інших датчиків, виходи...
Стенд для градуювання акселерометрів
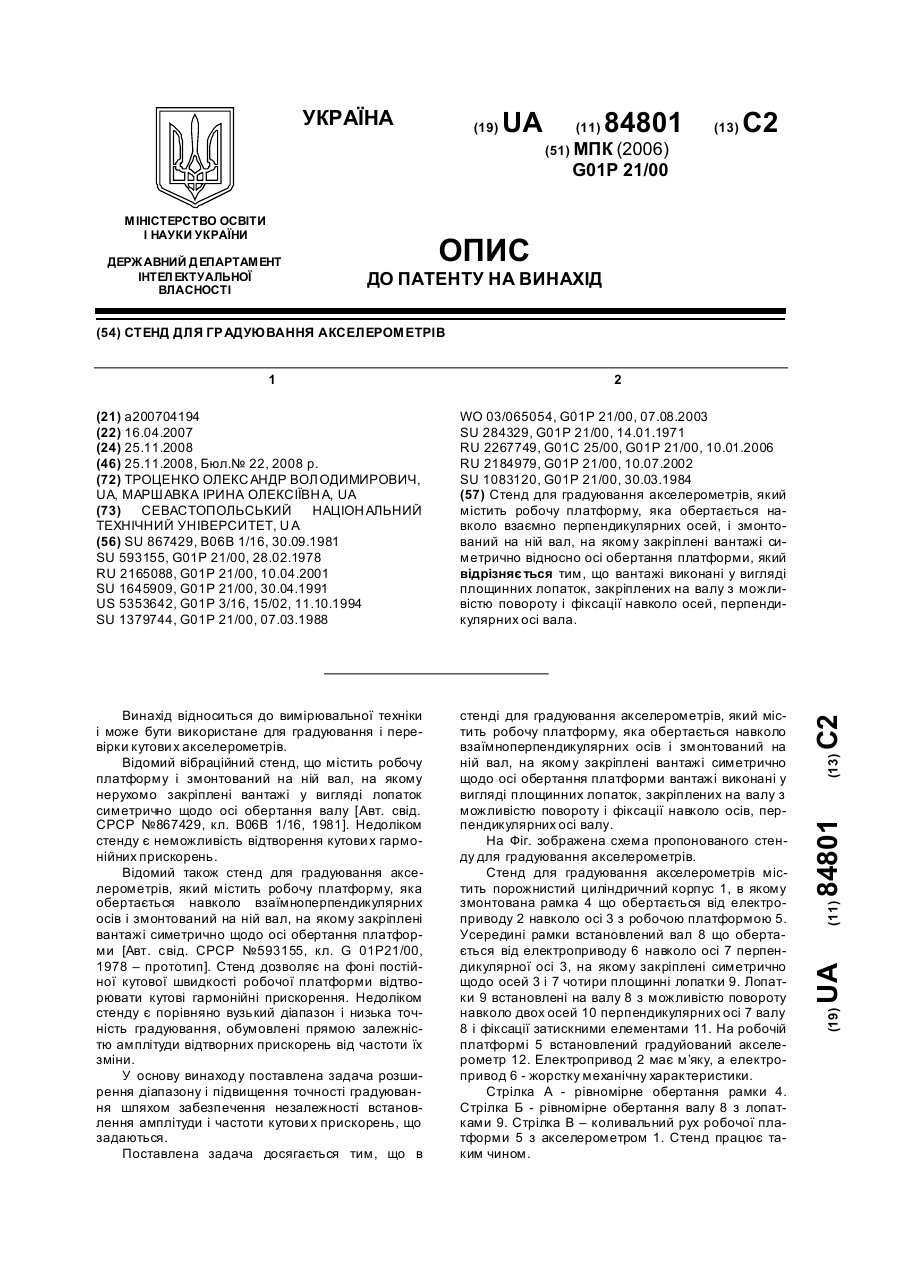
Номер патенту: 84801
Опубліковано: 25.11.2008
Автори: Маршавка Ірина Олексіївна, Троценко Олександр Володимирович
МПК: G01P 21/00
Мітки: стенд, градуювання, акселерометрів
Формула / Реферат:
Стенд для градуювання акселерометрів, який містить робочу платформу, яка обертається навколо взаємно перпендикулярних осей, і змонтований на ній вал, на якому закріплені вантажі симетрично відносно осі обертання платформи, який відрізняється тим, що вантажі виконані у вигляді площинних лопаток, закріплених на валу з можливістю повороту і фіксації навколо осей, перпендикулярних осі вала.
Блок відмовостійких сервоприводів для каналу тангажа
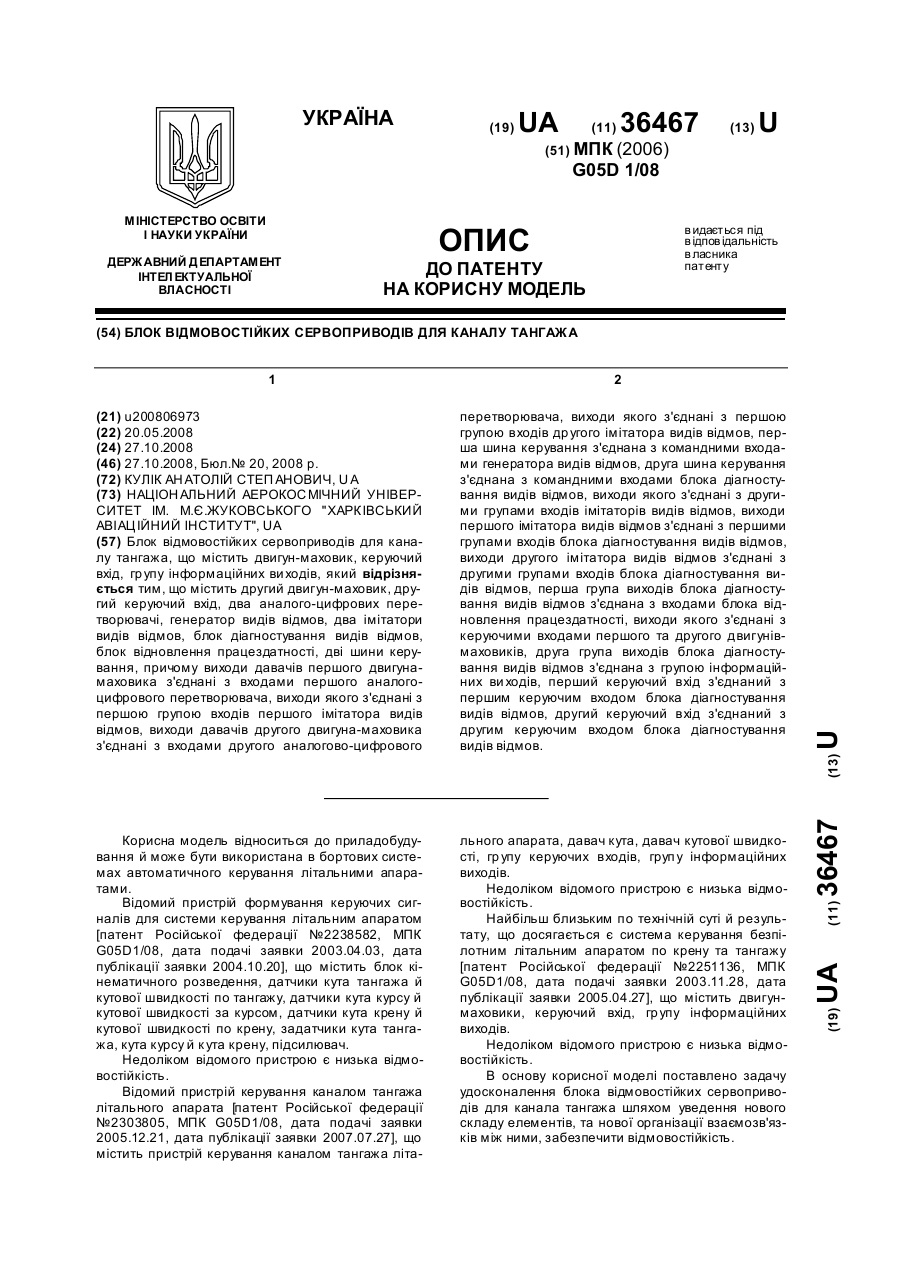
Номер патенту: 36467
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/08
Мітки: сервоприводів, каналу, тангажа, відмовостійких, блок
Формула / Реферат:
Блок відмовостійких сервоприводів для каналу тангажа, що містить двигун-маховик, керуючий вхід, групу інформаційних виходів, який відрізняється тим, що містить другий двигун-маховик, другий керуючий вхід, два аналого-цифрових перетворювачі, генератор видів відмов, два імітатори видів відмов, блок діагностування видів відмов, блок відновлення працездатності, дві шини керування, причому виходи давачів першого двигуна-маховика з'єднані з входами...
Попередній патент: Лінія для виготовлення брикетів з відходів переробки сталеплавильного шлаку
Наступний патент: Адаптивний спосіб стабілізації космічного літального апарата
Випадковий патент: Спосіб внесення мікроелемента міді на посівах сої