Агрегат для транспортування ракети
Номер патенту: 5114
Опубліковано: 15.02.2005
Автори: Мокін Олександр Васильович, Мільченко Віталій Іванович, Петрушевський Віктор Олександрович, Єрохін Віктор Васильович, Руденко Іван Кирилович, Мокін Андрій Олександрович
Формула / Реферат
1. Агрегат для транспортування ракети, переважно "пакетної" схеми, у вертикальному положенні, що містить встановлену на шасі основу з установними вузлами для блоків ракети, ферму обслуговування, на якій змонтовані вертикальні напрямні для рами з приводом переміщення, та вантажопідйомний кран, який відрізняється тим, що на рамі шарнірно змонтована телескопічна стріла з приводом повороту у поперечній площині і з вузлом кріплення блока ракети.
2. Агрегат для транспортування ракети за п. 1, який відрізняється тим, що вузол кріплення блока ракети виконаний у вигляді ложемента з стрічковою стяжкою.
3. Агрегат для транспортування ракети за п. 1, який відрізняється тим, що він оснащений блоком керування приводами переміщення і повороту телескопічної стріли, електрично зв'язаним через пристрій синхронізації з блоком керування вантажопідйомним краном.
Текст
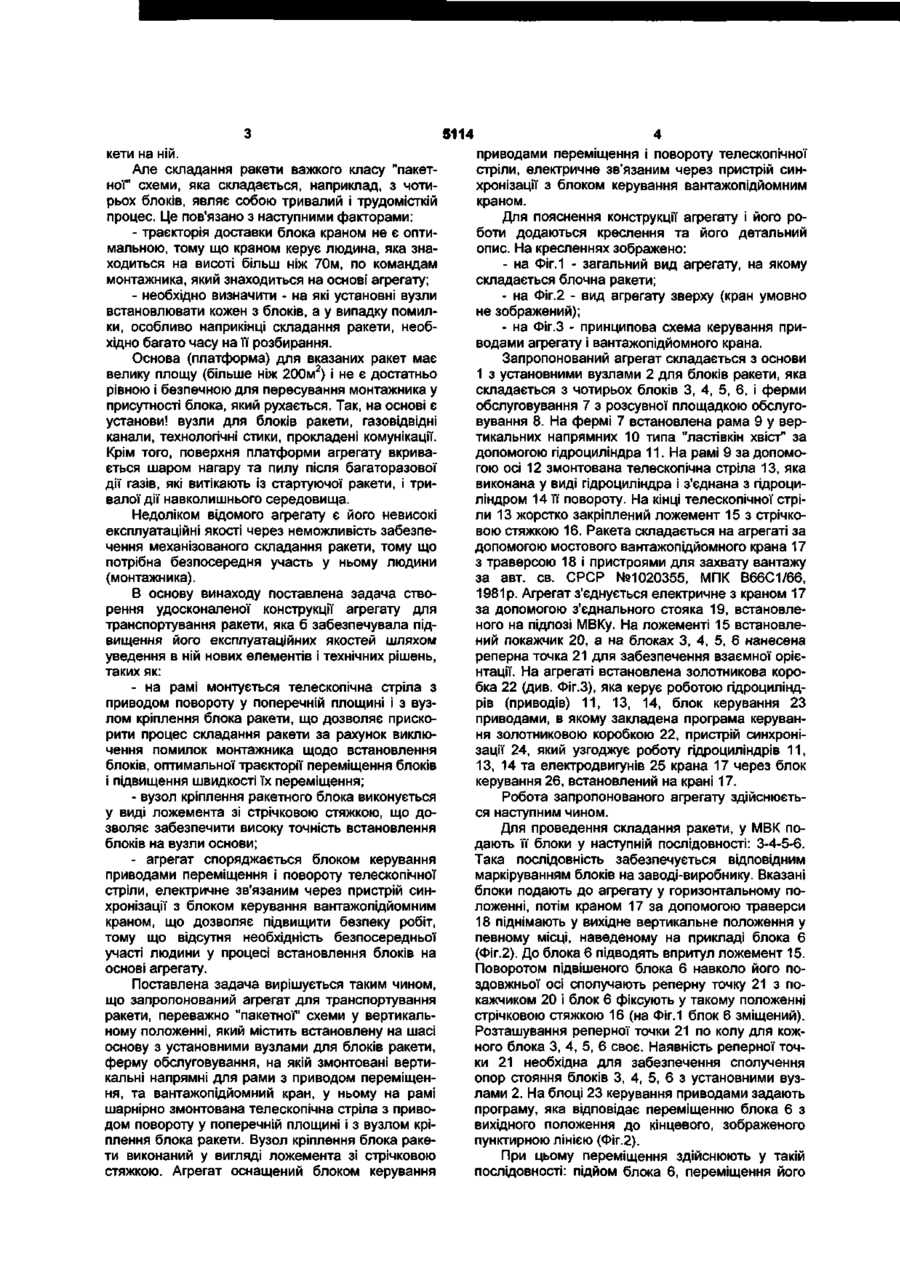
1. Агрегат для транспортування ракети, переважно "пакетної" схеми, у вертикальному положенні, що містить встановлену на шасі основу з установними вузлами для блоків ракети, ферму обслуговування, на якій змонтовані вертикальні напрямні для рами з приводом переміщення, та вантажопідйомний кран, який відрізняється тим, що на рамі шарнірно змонтована телескопічна стріла з приводом повороту у поперечній площині і з вузлом кріплення блока ракети. 2. Агрегат для транспортування ракети за п.1, який відрізняється тим, що вузол кріплення блока ракети виконаний у вигляді ложемента з стрічковою стяжкою. 3. Агрегат для транспортування ракети за п.1, який відрізняється тим, що він оснащений блоком керування приводами переміщення і повороту телескопічної стріли, електрично зв'язаним через пристрій синхронізації з блоком керування вантажопідйомним краном. Корисна модель відноситься до ракетнокосмічної галузі, а більш конкретно - до наземного обладнання і може використовуватися для забезпечення складання ракети, транспортування її на стартову позицію і пуску. Відомим є агрегат для складання ракети, який містить башту (ферму) обслуговування, на якій встановлений вантажопідйомний кран (див. книгу «Космодром» под ред. А.П.Вольского, М., «Воениздат», 1977, с.114, 117). Цей агрегат застосовується для складання ракет безпосередньо на пусковій установці. Для забезпечення складання ракети, на фермі обслуговування можуть монтуватися вертикальні напрямні, в яких за допомогою привода переміщується рама з установними вузлами для ракети (див. патент України №56896 А, МПК B64G5/00, F41F9/00, 2003р.). Недоліком відомого агрегату є його низькі експлуатаційні якості, такі як: - невисокий темп пусків ракет у зв'язку з тривалим перебуванням ракети на пусковій установці; - високі грошові витрати на будівництво стартового комплексу, тому що потрібна велика кіль кість технологічного обладнання, яке застосовується нецентралізовано. Найближчим до запропонованого по технічному рішенню є вибраний як прототип агрегат для транспортування ракети, який описаний у патенті України №46654А, МПК B64G5/00, 2001р. Вказаний агрегат містить встановлену на шасі основу з установними вузлами для ракети, ферму обслуговування, на якій змонтовані вертикальні напрямні для рами з приводом переміщення, та вантажопідйомний кран. Складання ракети на вказаному агрегаті здійснюється у висотному монтажновипробувальному корпусі (МВКі) за допомогою мостового крана (за патентом України №56935А, МПК B64G5/00, Е04Н5/02, 2002р.) або вантажопідйомного крана, встановленого на фермі обслуговування. Після складання ракети агрегат транспортує ракету до пускової установки, де і здійснюється пуск з агрегату. Застосування вказаного агрегату дозволяє скоротити час перебування ракети на пусковій установці і зменшити кількість технологічного обладнання на пусковій установці, тому що не потрібні операції щодо складання ра (24)15.02.2005 да 5114 кети на ній. Але складання ракети важкого класу "пакетної"" схеми, яка складається, наприклад, з чотирьох блоків, являє собою тривалий і трудомісткій процес. Це пов'язано з наступними факторами: - траєкторія доставки блока краном не є оптимальною, тому що краном керує людина, яка знаходиться на висоті більш ніж 70м, по командам монтажника, який знаходиться на основі агрегату; - необхідно визначити - на які установні вузли встановлювати кожен з блоків, а у випадку помилки, особливо наприкінці складання ракети, необхідно багато часу на її розбирання. Основа (платформа) для вказаних ракет має велику площу (більше ніж 200м2) і не є достатньо рівною і безпечною для пересування монтажника у присутності блока, який рухається. Так, на основі є установи! вузли для блоків ракети, газовідвідні канали, технологічні стики, прокладені комунікації. Крім того, поверхня платформи агрегату вкривається шаром нагару та пилу після багаторазової дії газів, які витікають із стартуючої ракети, і тривалої дії навколишнього середовища. Недоліком відомого агрегату є його невисокі експлуатаційні якості через неможливість забезпечення механізованого складання ракети, тому що потрібна безпосередня участь у ньому людини (монтажника). В основу винаходу поставлена задача створення удосконаленої конструкції агрегату для транспортування ракети, яка б забезпечувала підвищення його експлуатаційних якостей шляхом уведення в ній нових елементів і технічних рішень, таких як: - на рамі монтується телескопічна стріла з приводом повороту у поперечній площині і з вузлом кріплення блока ракети, що дозволяє прискорити процес складання ракети за рахунок виключення помилок монтажника щодо встановлення блоків, оптимальної траєкторії переміщення блоків і підвищення швидкості їх переміщення; - вузол кріплення ракетного блока виконується у виді ложемента зі стрічковою стяжкою, що дозволяє забезпечити високу точність встановлення блоків на вузли основи; - агрегат споряджається блоком керування приводами переміщення і повороту телескопічної стріли, електричне зв'язаним через пристрій синхронізації з блоком керування вантажопідйомним краном, що дозволяє підвищити безпеку робіт, тому що відсутня необхідність безпосередньої участі людини у процесі встановлення блоків на основі агрегату. Поставлена задача вирішується таким чином, що запропонований агрегат для транспортування ракети, переважно "пакетної" схеми у вертикальному положенні, який містить встановлену на шасі основу з установними вузлами для блоків ракети, ферму обслуговування, на якій змонтовані вертикальні напрямні для рами з приводом переміщення, та вантажопідйомний кран, у ньому на рамі шарнірно змонтована телескопічна стріла з приводом повороту у поперечній площині і з вузлом кріплення блока ракети. Вузол кріплення блока ракети виконаний у вигляді ложемента зі стрічковою стяжкою. Агрегат оснащений блоком керування приводами переміщення і повороту телескопічної стріли, електричне зв'язаним через пристрій синхронізації з блоком керування вантажопідйомним краном. Для пояснення конструкції агрегату і його роботи додаються креслення та його детальний опис. На кресленнях зображено: - на Фіг. 1 - загальний вид агрегату, на якому складається блочна ракети; - на Фіг.2 - вид агрегату зверху (кран умовно не зображений); - на Фіг.З - принципова схема керування приводами агрегату і вантажопідйомного крана. Запропонований агрегат складається з основи 1 з установними вузлами 2 для блоків ракети, яка складається з чотирьох блоків 3, 4, 5, 6, і ферми обслуговування 7 з розсувної площадкою обслуговування 8. На фермі 7 встановлена рама 9 у вертикальних напрямних 10 типа "ластівкін хвіст" за допомогою гідроциліндра 11. На рамі 9 за допомогою осі 12 змонтована телескопічна стріла 13, яка виконана у виді гідроциліндра і з'єднана з гідроциліндром 14 її повороту. На кінці телескопічної стріли 13 жорстко закріплений ложемент 15 з стрічковою стяжкою 16. Ракета складається на агрегаті за допомогою мостового вантажопідйомного крана 17 з траверсою 18 і пристроями для захвату вантажу за авт. св. СРСР №1020355, МПК В66С1/66, 1981р. Агрегат з'єднується електричне з краном 17 за допомогою з'єднального стояка 19, встановленого на підлозі МВКу. На ложементі 15 встановлений покажчик 20, а на блоках 3, 4, 5, 6 нанесена реперна точка 21 для забезпечення взаємної орієнтації. На агрегаті встановлена золотникова коробка 22 (див. Фіг.З), яка керує роботою гідроциліндрів (приводів) 11, 13, 14, блок керування 23 приводами, в якому закладена програма керування золотниковою коробкою 22, пристрій синхронізації 24, який узгоджує роботу гідроциліндрів 11, 13, 14 та електродвигунів 25 крана 17 через блок керування 26, встановлений на крані 17. Робота запропонованого агрегату здійснюється наступним чином. Для проведення складання ракети, у МВК подають її блоки у наступній послідовності: 3-4-5-6. Така послідовність забезпечується відповідним маркіруванням блоків на заводі-виробнику. Вказані блоки подають до агрегату у горизонтальному положенні, потім краном 17 за допомогою траверси 18 піднімають у вихідне вертикальне положення у певному місці, наведеному на прикладі блока 6 (Фіг.2). До блока 6 підводять впритул ложемент 15. Поворотом підвішеного блока 6 навколо його поздовжньої осі сполучають реперну точку 21 з покажчиком 20 і блок 6 фіксують у такому положенні стрічковою стяжкою 16 (на Фіг. 1 блок 6 зміщений). Розташування реперної точки 21 по колу для кожного блока 3, 4, 5, 6 своє. Наявність реперної точки 21 необхідна для забезпечення сполучення опор стояння блоків 3, 4, 5, 6 з установними вузлами 2. На блоці 23 керування приводами задають програму, яка відповідає переміщенню блока 6 з вихідного положення до кінцевого, зображеного пунктирною лінією (Фіг.2). При цьому переміщення здійснюють у такій послідовності: підйом блока 6, переміщення його 5114 паралельно ПІДЛОЗІ ПО наикоротшіи траєкторії, яка забезпечує одночасно безударність блока 6 з елементами агрегату і з встановленими блоками З, 4, 5, та опускання блока 6 на установні вузли 2. Потім стрічкову стяжку 16 знімають і телескопічну стрілу 13 повертають у вихідне положення Відстикування траверси 18 від блоків 3, 4, 5, 6 здійснюють з розсувної площадки обслуговування 8. На період транспортування і пуску телескопічна стрі Комп'ютерна верстка Н Лисенко 6 ла 13 розташовується вздовж бічної .поверхні ферми обслуговування 7, що дозволяє забезпечити збереження телескопічної стріли 13 під час пуску ракети. Таким чином, запропонований агрегат, який має просту і надійну конструкцію, забезпечує механізоване складання ракети "пакетної" схеми у МВКі. Підписне Тираж 37 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAssembly for transportation of rocket
Автори англійськоюYerokhin Viktor Vasyliovych, Mokin Andrii Oleksandrovych, Mokin Oleksandr Vasyliovych, Petrushevskyi Viktor Oleksandrovych
Назва патенту російськоюАгрегат для транспортировки ракеты
Автори російськоюЕрохин Виктор Васильевич, Мокин Андрей Александрович, Мокин Александр Васильевич, Петрушевский Виктор Александрович
МПК / Мітки
МПК: B64G 5/00
Мітки: ракети, агрегат, транспортування
Код посилання
<a href="https://ua.patents.su/4-5114-agregat-dlya-transportuvannya-raketi.html" target="_blank" rel="follow" title="База патентів України">Агрегат для транспортування ракети</a>
Агрегат для транспортування ракети

Номер патенту: 56896
Опубліковано: 15.05.2003
Автори: Трушин Володимир Миколайович, Харченко Єлена Олександрівна, Левіна Ірина Львівна, Мокін Олександр Васильович, Мокін Андрій Олександрович, Репетя Євген Іванович
Мітки: ракети, агрегат, транспортування
Формула / Реферат:
Агрегат для транспортування ракети, переважно у вертикальному положенні, що містить встановлену на шасі основу, ферму обслуговування і раму з установними вузлами для ракети, який відрізняється тим, що він оснащений закріпленими на фермі обслуговування вертикальними напрямними, у яких встановлена рама з можливістю переміщення за допомогою приводу, при цьому рама виконана П-подібної форми, а її вільні кінці орієнтовані у напрямку від ферми...
Агрегат для транспортування ракети
Номер патенту: 46654
Опубліковано: 15.05.2002
Автори: Козак Ігор Львович, Баранов Євген Юр'євич, Легеза Володимир Семенович, Мокін Олександр Васильович, Мікаєв Володимир Сергійович, Мокін Андрій Олександрович
МПК: B64G 5/00
Мітки: ракети, транспортування, агрегат
Формула / Реферат:
Агрегат для транспортування ракети, переважно у вертикальному положенні, що містить встановлену на шасі прямокутну основу, на якій змонтовані ферма обслуговування, установні вузли й вузли зв'язку ракети з наземним обладнанням, який відрізняється тим, що у ньому прямокутна основа складається з двох частин, одна з яких виконана з поздовжним вирізом, переважно П-подібної форми, в якому розміщена змінна частина, на якій змонтовані установні вузли...
Агрегат для стикування заправних магістралей пускової установки ракети
Номер патенту: 69213
Опубліковано: 16.08.2004
Автори: Мокін Андрій Олександрович, Тітов Анатолій Вікторович, Обрубов Віктор Михайлович, Красницький Йосип Якович, Грачьов Віктор Васильович, Мокін Олександр Васильович
Мітки: ракети, стикування, установки, магістралей, пускової, заправних, агрегат
Формула / Реферат:
1. Агрегат для стикування заправних магістралей пускової установки ракети, що містить каретку з нижнім і верхнім заправними патрубками, які взаємодіють з заправними горловинами, змонтованими на корпусі ракети, закріплені на підлозі ніші пускової установки радіальні напрямні для роликів каретки, напрямні штирі, встановлені на верхньому заправному патрубку, пружинні тяги та привід каретки, який відрізняється тим, що ролики змонтовані за...
Авіаційний ракетний комплекс для транспортування і запуску в повітрі ракети
Номер патенту: 43737
Опубліковано: 15.11.2004
Автори: Сідельников Леонід Павлович, Гончаренко Віктор Миколайович, Майданюк Дмитро Вікторович, Конюхов Станіслав Миколайович, Коваленко Борис Якович, Мащенко Олександр Миколайович, Легеза Володимир Семенович, Лепескин Ігор Борисович, Брильов Юрій Петрович, Бойчун Сергій Євгенович
МПК: B64D 5/00, B64D 1/00, F41F 3/00
Мітки: комплекс, повітрі, ракети, запуску, авіаційний, транспортування, ракетний
Формула / Реферат:
1. Авіаційний ракетний комплекс для транспортування і запуску в повітрі ракети, що містить літак, прилади й устаткування, необхідне для підготовки до запуску і керування стартом ракети, а також транспортно-пусковий контейнер з ракетою і встановленими усередині транспортно-пускового контейнера напрямними для установлення ракети, зміщеними відносно одна одної, який відрізняється тим, що транспортно-пусковий контейнер виконаний як транспортний...
Авіаційний ракетний комплекс для транспортування і запуску в повітрі ракети

Номер патенту: 45171
Опубліковано: 15.03.2002
Автори: Корчменко Юрій Іванович, Сердюк Іван Іванович, Брильов Юрій Петрович, Гончаренко Віктор Миколайович, Сідельников Леонід Павлович, Легеза Володимир Семенович, Коваленко Борис Якович, Ус Сергій Станіславович, Попруга Дмитро Володимирович, Лепескин Ігор Борисович, Майданюк Дмитро Вікторович, Бойчун Сергій Євгенович, Конюхов Станіслав Миколайович
МПК: B64D 5/00
Мітки: ракети, транспортування, запуску, комплекс, авіаційний, повітрі, ракетний
Формула / Реферат:
1. Авіаційний ракетний комплекс для транспортування і запуску в повітрі ракети, що містить літак, який має прилади й устаткування, необхідні для підготовки до запуску і керування стартом ракети, ракету, а також встановлені усередині фюзеляжу опори і напрямні для установлення в літаку ракети і скидання її, який відрізняється тим, що опори і напрямні для установлення ракети виконані у вигляді транспортно-пускової платформи, що складається з...
Попередній патент: Спосіб лікування системного червоного вовчака
Наступний патент: Лікувально-профілактичний напій
Випадковий патент: Спосіб сортування та подрібнення використаних полімерних пляшок