Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу
Формула / Реферат
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу, який містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), перший суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння, а також послідовно з'єднані датчик довжини підвіски вантажу , блок добування квадратного кореня, блок множення і блок масштабування, вихід якого підключений до одного із входів першого суматора, який відрізняється тим, що він містить послідовно з'єднані другий суматор, перший і другий інтегратори, перший вхід другого суматора з'єднаний з датчиком швидкості транспортного механізму, а другий вхід підключений до виходу другого інтегратора, вхід якого з'єднаний з другим входом блока множення, а керуючий вхід підключений до виходу датчика довжини підвіски вантажу.
Текст
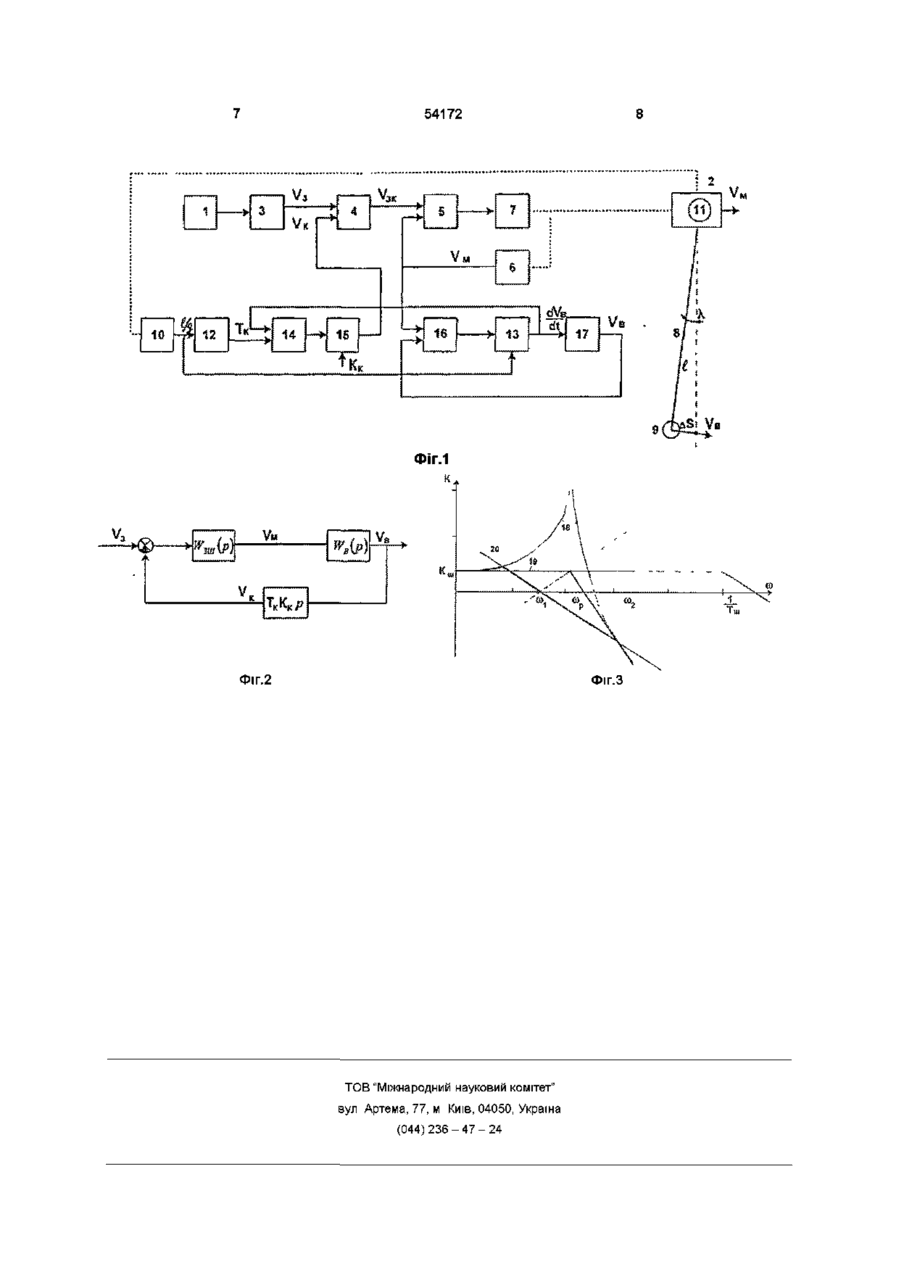
Пристрій для керування приводом транспортного механізму з гнучкою ПІДВІСКОЮ вантажу, який містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), перший суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння, а також послідовно Передбачуваними пристрій належить до галузі машинобудування і, в першу чергу, до систем керування приводом вантажопідіймальних кранів Винахід можна використовувати під час розробки електроприводів транспортних механізмів перевантажуючих та монтажних кранів з підвищеними вимогами до експлуатаційних показників (точність роботи, продуктивність, енергоспоживання) ВІДОМІ різні пристрої, які в тій чи ІНШІЙ мірі ви рішують задачу усування коливань підвішеного на гнучкій ПІДВІСЦІ вантажу під час його транспортування Так, наприклад, в пристрої за а с СРСР №1564103 для вирішення цієї задачі застосовані складні елементи для вимірювання багатьох параметрів, що зменшує його надійність та ускладнює реалізацію Найбільш близьким до запропонованого є пристрій за а с СРСР №1799844 ("Устройство для управления приводом крановой тележки с гибкой подвеской груза") Пристрій містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння Пристрій містить також послідовно з'єднані датчик довжини ПІДВІСКИ ван з'єднані датчик довжини ПІДВІСКИ вантажу , блок добування квадратного кореня, блок множення і блок масштабування, вихід якого підключений до одного із входів першого суматора, який відрізняється тим, що він містить послідовно з'єднані другий суматор, перший і другий інтегратори, перший вхід другого суматора з'єднаний з датчиком швидкості транспортного механізму, а другий вхід підключений до виходу другого інтегратора, вхід якого з'єднаний з другим входом блока множення, а керуючий вхід підключений до виходу датчика довжини ПІДВІСКИ вантажу тажу, блок добування квадратного кореня, блок множення і блок масштабування, вихід якого підключений до одного із входів суматора Крім цього, в пристрої застосований датчик кута відхилення гнучкої ПІДВІСКИ від вертикалі, вихід якого з'єднаний з одним із входів блока множення Недоліком цього пристрою є наявність складного по своїй побудові датчика кута відхилення ПІДВІСКИ від вертикалі, що ускладнює реалізацію пристрою в цілому, та обмежує галузь його використання Сутністю виноходу та його ВІДМІТНИМИ ознаками становить введення в відомий пристрій послідовно сполучених другого суматора, першого і другого інтеграторів При цьому перший вхід другого сумматора з'єднаний з датчиком швидкості транспортного механізму, а другий вхід підключений до виходу другого інтегратора, вхід якого з'єднаний з другим входом блоком множення, а керуючий вхід підключений до виходу датчика довжини ПІДВІСКИ вантажу Введення в пристрій і з'єднання зазначених складових частин дозволяє сформувати сигнал коректування швидкості транспортного механізму, виключаючий коливання підвішеного вантажу, без застосування датчика кута відхилення ПІДВІСКИ від вертикалі На фіг 1 наведена функціональна схема пристрою, на фіг 2 - структурна схема системи авто 5 ю 54172 матичного керування (САК) швидкості вантажу, на фіг 3 - логарифмічні амплітудно-частотні характеристики (ЛАЧХ) САК швидкості вантажу Пристрій містить задатчик 1 швидкості транспортного механізму 2, підключений до входу задатчика 3 інтенсивності прискорення (гальмування) транспортного механізму, вихід якого з'єднаний з другим входом першого суматора 4 Вихід суматора 4 підключений до другого входу блока 5 порівняння, перший вхід якого з'єднаний з датчиком швидкості транспортного механізму, а вихід підключений до входу виконуючого блока 7, який діє на транспортний механізм На ПІДВІСЦІ 8, з'єднаній з транспортним механізмом, підвішений вантаж 9 Довжина ПІДВІСКИ вимірюється за допомогою датчика 10, з'єднаного з механізмом 11 підіймання вантажу Вихід датчика 10 довжини ПІДВІСКИ підключений до входу блока 12 добування квадратного кореня та до другого входу інтегратора 13, а вихід - до другого входу блока 14 множення, перший вхід якого з'єднаний з виходом інтегратора 13 Вихід блока 14 множення підключений до входу блока 15 масштабування, вихід якого з'єднаний з першим входом першого суматора 4 Вихід датчика швидкості 6 підключений до першого входу другого суматора 16, вихід якого з'єднаний з першим входом першого інтегратора 13, вихід якого підключений до входу другого інтегратора 17, вихід якого з'єднаний з другим входом другого суматора 16 Задатчиком 1 швидкості транспортного механізму може бути, наприклад, командоапарат, формуючий сигнал завдання потрібної величини швидкості транспортного механізму в вигляді напруги, струму або цифрового коду Задатчик 3 інтенсивності прискорення (гальмування) транспортного механізму формує сигнал, який змінюється з часом до величини заданої задатчиком 1 швидкості і може бути, наприклад, виготовлений у вигляді послідовно з'єднаних компаратора та інтегратора, охоплених негативним зворотним зв'язком Блоком 5 порівняння може бути, наприклад, пропорційний регулятор швидкості, який обчислює розузгодження між заданим та фактичним значеннями швидкості транспортного механізму Виконуючий блок 7 містить, наприклад, регульоване джерело постачання електричним струмом та електродвигун, з'єднаний з транспортним механізмом Блок 15 масштабування може бути побудований у вигляді підсилювача з заданим коефіцієнтом підсилення Датчик 10 довжини ПІДВІСКИ може бути побудований у вигляді пристрою, який перетворює кут повороту барабана механізму 11 підіймання вантажу на сигнал, пропорційний довжині випущеного канату Перший інтегратор 13 має керуючий вхід, за допомогою якого можна змінювати сталу часу інтегрування Для опису сутності роботи пристрою його треба розглядати як систему автоматичного регулювання швидкості вантажу До неї входить замкнутий контур регулювання швидкості транспортного механізму, який містить блок 5 порівняння, виконуючий блок 7, датчик 6 швидкості транспортного механізму, і може з достатньою точністю розглядатися як ланка другого порядку з передаточною функцією w3m(p) = VM(P) V3K(P) в якій Кш - коефіцієнт підсилення замкнутого контуру регулювання швидкості транспортного механізму, VM - швидкість механізму, \/зк - сигнал заданої швидкості механізму, Т ш - стала часу замкнутого контуру регулювання швидкості транспортного механізму, q - коефіцієнт затухання Підвішений вантаж можна розглядати як консервативну ланку з передаточною функцією WB(p) = v B ( P )_ і в якій VB - швидкість вантажу, Тк - стала часу ланки, яка виражається виразом Тк (3) в якому І - довжина ПІДВІСКИ, g - прискорення вільного падіння Резонансна частота консервативної ланки визначається виразом 1 1 Т К 11 (4) Прискорення вантажу в результаті дії на нього сили, яка виникає при відхиленні ПІДВІСКИ ВІД вертикалі, визначається виразом avb = gsinA,, (5) at в якому X - кут відхилення ПІДВІСКИ від вертикалі, Ураховуючи, що sinA,= вираз (5) можна записати у вигляді (6) в якому AS - розузгодження по шляху транспортного механізму та вантажу Під час роботи пристрою передаточна функція (2) реалізується за допомогою послідовно з'єднаних інтеграторів 13 і 17, охоплених через суматор 16 негативним зворотним зв'язком На виході інтегратора 13 формується сигнал av b пропорційний ПОХІДНІЙ ВІД at ШВИДКОСТІ вантажу, а на виході інтегратора 17 сигнал, пропорційний швидкості вантажу Vb Блоком 12 виконується обчислення сталої часу Тк консервативної ланки ВІДПОВІДНО ДО виразу (3), і сигнал, пропорційний цьому параметру, подається на вхід блока 14 множення В блоці 14 виконується перемноження сигналу похідної на сталу at часу Тк, і сформований на виході сигнал подається на вхід блоку 15 масштабування, в якому підсилюється з коефіцієнтом Кк і надходить на перший вхід першого суматора 4 як сигнал корекції заданої швидкості Уз транспортного механізму, обчисле 54172 ний ВІДПОВІДНО до виразу у к,. Т., = — (7) Цей сигнал алгебраїчне додається до сигналу Уз, сформованого задатчиком З інтенсивності прискорення (гальмування) Таким чином, пристрій являє собою САК з зворотним зв'язком по ПОХІДНІЙ від швидкості вантажу (див Фіг 2) Оскільки стала часу Тк здебільшого значно перевищує величину Тш, можна знехтувати впливом коливань вантажу на швидкість транспортного механізму і вважати, що прямий канал регулювання швидкості вантажу містить послідовно з'єднані замкнутий контур регулювання швидкості транспортного механізму з передаточною функцією (1) і консервативну ланку з передаточною функцією (2), а ланцюг зворотного зв'язку містить диференціючу ланку з передаточною функцією W 3 3 ( P ) = ^ = T33p (8) в якій Т 3 3 - стала часу диференціювання, яка визначається ВІДПОВІДНО до виразу Т 3 3 = Кк х Т к (9) ЛАЧХ 18 прямого каналу регулювання (див фіг 3) має горизонтальну ділянку з коефіцієнтом підсилення Кш і резонансний сплеск на частоті Ю Асимптотична характеристика 19 на цій частоті р має злам і далі проходить з ухилом 40дб/дек Для визначення коефіцієнта підсилювання Кк блока масштабування, який забезпечує аперіодичний характер перехідного процесу змінення швидкості вантажу, на фіг 3 побудована ЛАЧХ 20 ланцюга зворотного зв'язку, яка відповідає умовам (02 = 2(01, сор К, 00) со2 І ю2 з яких знаходимо =Ю Кщ Тс (11) З врахуванням (4), (9) і (11) знаходимо К, = 2~ (12) На фіг 3 жирною ЛІНІЄЮ показана ЛАЧХ замкнутої системи регулювання швидкості вантажу Пристрій працює так В початковому стані транспортний механізм і піднятий на деяку висоту вантаж знаходяться в стані спокою При цьому довжина ПІДВІСКИ дорівнює величині І, а кут відхилення ПІДВІСКИ від вертикалі дорівнює нулю Для транспортування вантажу по команді оператора механізму на вхід задатчика 3 інтенсивності прискорення за допомогою задатчика 1 швидкості подається сигнал задания потрібної швидкості механізму На виході задатчика 3 сигнал V3 починає ЛІНІЙНО збільшуватись Сигнал V3 через суматор 4 проходить на другий вхід блока 5 порівняння, який є входом САК швидкості транспортного механізму Під ДІЄЮ САК, яка відпрацьовує за вдання по швидкості, механізм починає рухатись і фактична швидкість відповідає сигналу завдання Уз Під час руху механізму із стану спокою підвіска, яка підтримує вантаж, відхиляється від вертикалі на деякий кут X, в результаті чого виникає сила, яка діє на вантаж і він також починає рухатись На виході інтегратора 13 з'являється сигнал, пропорційний розузгодженню по шляху механізму і вантажу, а на виході блока 15 масштабування формується сигнал Ук ВІДПОВІДНО до виразу (7) Цей сигнал подається на вхід суматора 4 зі знаком, протилежним знаку сигналу Узк, і цим зменшує сумарний сигнал задания швидкості Узк Завдяки такій дії негативного зворотного зв'язку по прискоренню вантажу, стала часу якого визначається ВІДПОВІДНО до виразу (9), рух вантажу здійснюється плавно, без коливань швидкості як під час прискорення (гальмування), так і під час транспортування вантажу При цьому довжина ПІДВІСКИ може змінюватися на будь-якому етапі руху механізму, не впливаючи на якість перехідного процесу, а величина переміщення і рівень швидкості можуть змінюватися в широкому діапазоні Таким чином, завдяки переліченим! ознакам галузь застосування пристрою значно розширюється Крім того, відсутність в пристрої Датчика для вимірювання кута відхилення ПІДВІСКИ ВІД вертикалі значно спрощує його реалізацію і підвищує надійність в роботі Відсутність коливань вантажу під час його транспортування усуває коливання струму електродвигуна, що зменшує його нагрівання Ці фактори покращують експлуатаційні і енергетичні характеристики пристою і є джерелом позитивного ефекту 54172 • 2 10 12 15 16 13 д 17 ФІГ.1 к Фіг.2 Фіг.З TOB "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for drive control of a transport mechanism with flexible suspension bracket of cargo
Автори англійськоюKholodnyi Valerii Ivanovych
Назва патенту російськоюУстройство для управления приводом транспортного механизма с гибкой подвеской груза
Автори російськоюХолодный Валерий Иванович
МПК / Мітки
МПК: B66C 13/04
Мітки: механізму, приводом, пристрій, вантажу, гнучкою, керування, підвіскою, транспортного
Код посилання
<a href="https://ua.patents.su/4-54172-pristrijj-dlya-keruvannya-privodom-transportnogo-mekhanizmu-z-gnuchkoyu-pidviskoyu-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу</a>
Пристрій для управління пневматичною підвіскою транспортного засобу
Номер патенту: 50545
Опубліковано: 15.10.2002
Автор: Олєфір Ігорь Анатольєвіч
МПК: B60G 21/00
Мітки: підвіскою, транспортного, пристрій, пневматичною, управління, засобу
Формула / Реферат:
Пристрій для управління пневматичною підвіскою транспортного засобу, що містить перемикальний золотниковий пристрій з принаймні двома отворами для проходу стисненого повітря і принаймні однією золотниковою парою з золотником, що має змогу повороту відносно вищезгаданих отворів для комутації проходу через них стисненого повітря, який відрізняється тим, що для ущільнення і зниження тертя робочих поверхонь золотникової пари поверхні...
Пристрій для контролю витрати палива транспортного засобу з електричною передачею потужності
Номер патенту: 43110
Опубліковано: 15.11.2001
Автори: Шелковий Олександр Володимирович, Манзюк Сергій Викторович, Заскалько Олексій Петрович, Азаров Руслан Володимирович
МПК: B61C 15/00
Мітки: транспортного, пристрій, передачею, електричною, палива, засобу, контролю, потужності, витрати
Формула / Реферат:
Пристрій для контролю витрат палива транспортного засобу з електричною передачею потужності, який містить блок визначення потужності, який відрізняється тим, що включає у себе датчик напруги та датчик струму генератора, які поєднані своїми виходами зі входами блока визначення потужності, а також визначник режиму роботи двигуна, вихід якого з'єднаний через блок вибору апроксимуючої функції з другим входом арифметичного пристрою, перший вхід...
Пристрій для кріплення вантажу на платформі транспортного засобу
Номер патенту: 4600
Опубліковано: 28.12.1994
Автори: Малов Арнольд Дмітрієвіч, Лавренов Борис Миколайович, Завгородній Іван Павлович, Шінкарєнко Владімір Ніколаєвіч
МПК: B60P 7/06
Мітки: платформи, пристрій, засобу, вантажу, транспортного, кріплення
Формула / Реферат:
1. Устройство для крепления груза на платформе транспортного средства, содержащее жестко закрепленное на грузе основание и элемент крепления основания к платформе, представляющий собой соединенный с основанием стяжными болтами вертикальный кронштейн, один конец которого расположен с возможностью взаимодействия с нижней поверхностью боковой балки платформы, отличающееся тем, что основание выполнено в виде L-образного кронштейна, к верхней...
Пристрій автоматичного керування приводом подачі електрода-інструмента в електроерозійних станках
Номер патенту: 16288
Опубліковано: 29.08.1997
Автори: Беслік Олексій Іванович, Полуянов Володимир Сергійович, Отто Марк Шмульович, Васильєв Юрій Вікторович
МПК: B23H 7/00
Мітки: електроерозійних, станках, електрода-інструмента, пристрій, подачі, керування, автоматичного, приводом
Формула / Реферат:
Устройство автоматического управления приводом подачи электрода-инструмента в электроэрозионных станках, содержащее устройство выделения сигнала, пропорционального сопротивлению эрозионного промежутка, блок задания эталонного сигнала, подключенный к устройству сравнения, усилитель, привод подачи, отличающееся тем, что, с целью повышения производительности обработки, в него введены устройство выделения сигнала, пропорционального напряжению на...
Пристрій для адаптивного керування процесом металообробки
Номер патенту: 35845
Опубліковано: 16.04.2001
Автор: Коцюбинський Віктор Семенович
МПК: G05B 13/02
Мітки: адаптивного, металообробки, процесом, пристрій, керування
Формула / Реферат:
Пристрій для адаптивного керування процесом металообробки, до складу якого входить блок завдання, вихід якого з'єднаний з першим входом суматора , вихід суматора з'єднаний зі входом електроприводу подачі, підключеного виходом зі входом датчика швидкості подачі, і зі входом редуктора приводу подачі, вихід редуктора з'єднаний із верстатом, який містить електродвигун приводе шпинделя верстати, який містить датчик потужності, вихід якого...
Попередній патент: Котел
Наступний патент: Пристрій для топометрії пухлин у голові
Випадковий патент: Спосіб інтенсифікації дегазації та видобутку метану з навантажених вугільних пластів