Екскаватор з робочим обладнанням лопати
Номер патенту: 57289
Опубліковано: 15.08.2005
Автори: Токарев Олексій Захарович, Дзержинський Віталій Олександрович, Слабоспицький Ігор Анатолійович, Хорунжий Володимир Дмитрович
Формула / Реферат
1. Екскаватор з робочим обладнанням лопати, що містить ходові візки з рамою і платформу, що опирається на раму з можливістю обертання і на якій установлена стріла, оснащена приводом хитання рукояті з ковшем, закріпленої на кінці стріли, який відрізняється тим, що рукоять на стрілі закріплена за допомогою установленого з можливістю хитання опорного вузла, виконаного у вигляді циліндричної оболонки, всередині якої установлена з можливістю обертання циліндрична втулка, що охоплює рукоять, а рукоять виконана з поздовжніми напрямними, взаємодіючими з напрямними циліндричної втулки і оснащена додатково приводом поздовжнього переміщення, у вигляді силового циліндра та приводом обертання циліндричної втулки, встановленим в в опорному вузлі рукояті.
2. Екскаватор по п. 1, який відрізняється тим, що в опорному вузлі рукояті встановлений привід обертання циліндричної втулки навколо її поздовжньої осі, виконаний, наприклад, у вигляді черв'ячної пари, колесо якої встановлено на втулці, а черв'як - на оболонці.
3. Екскаватор по п. 1, який відрізняється тим, що привід хитання рукояті виконано у вигляді встановлених на стрілі силових циліндрів, штоки яких зв'язані з рукояттю циліндричним шарніром.
4. Екскаватор по п. 1, який відрізняється тим, що довжина ходу поздовжнього переміщення рукояті визначена за формулою:
Lp=0,2(Нк+Гк):2хНк/Гк,
де: Нк - висота копання;
Гк - глибина копання.
Текст
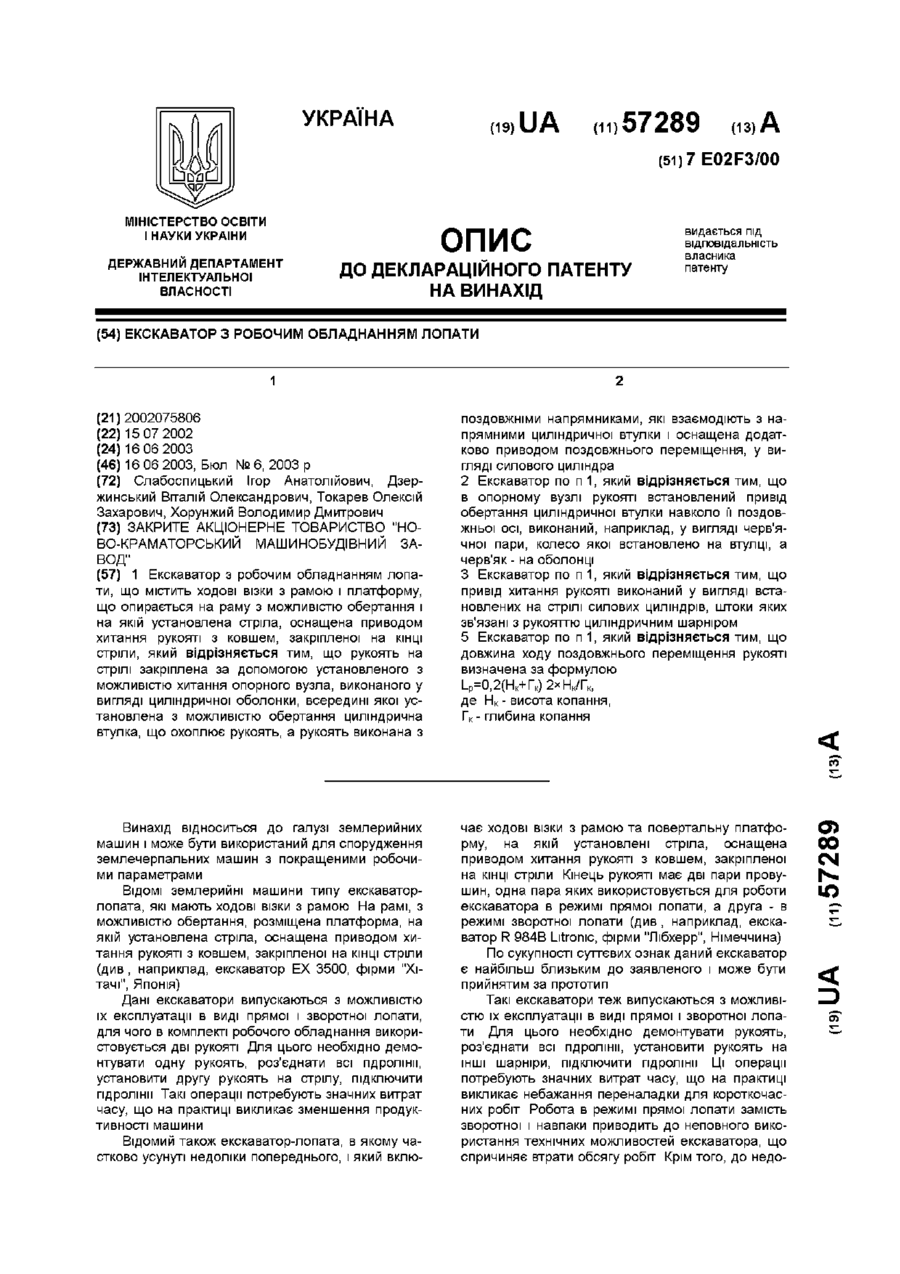
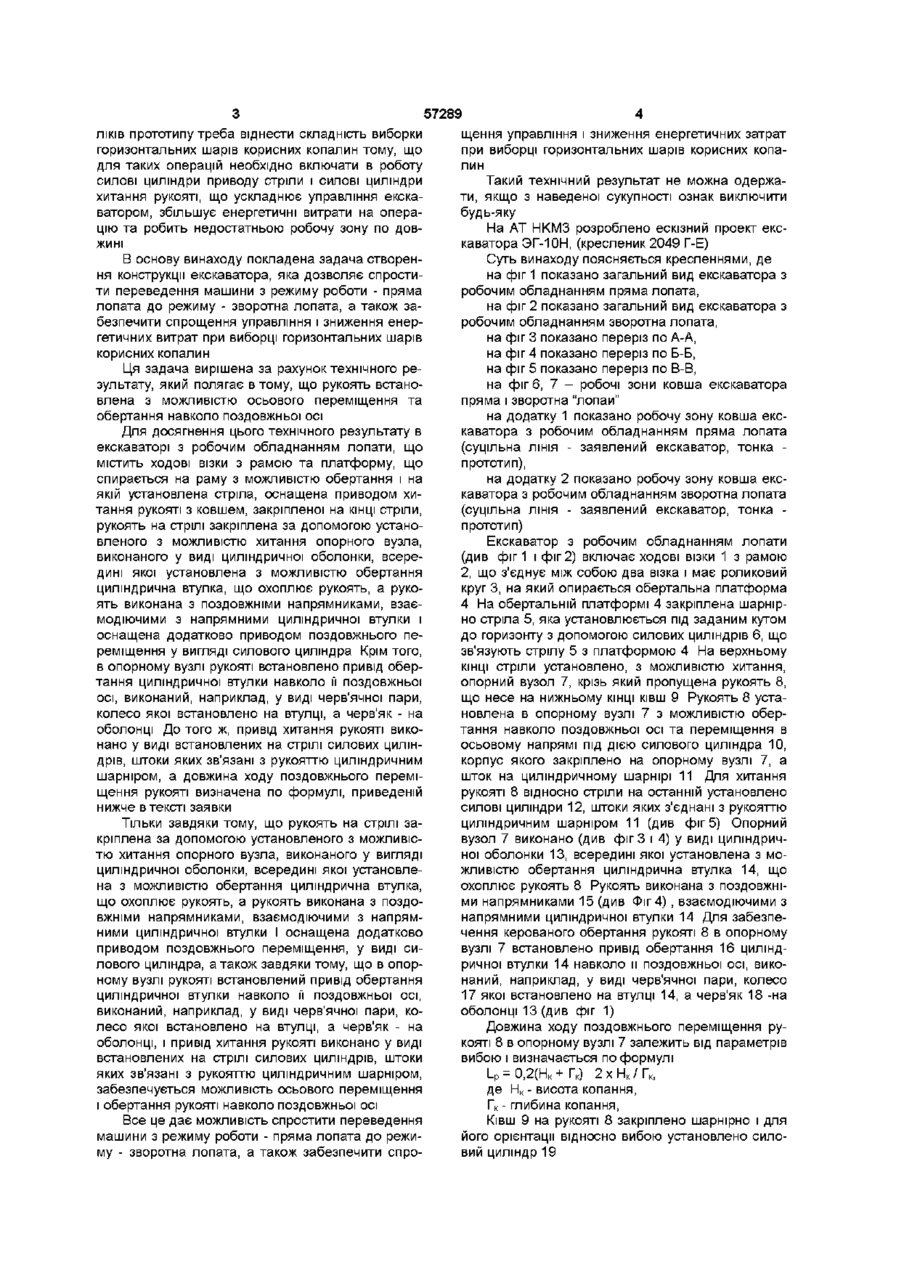
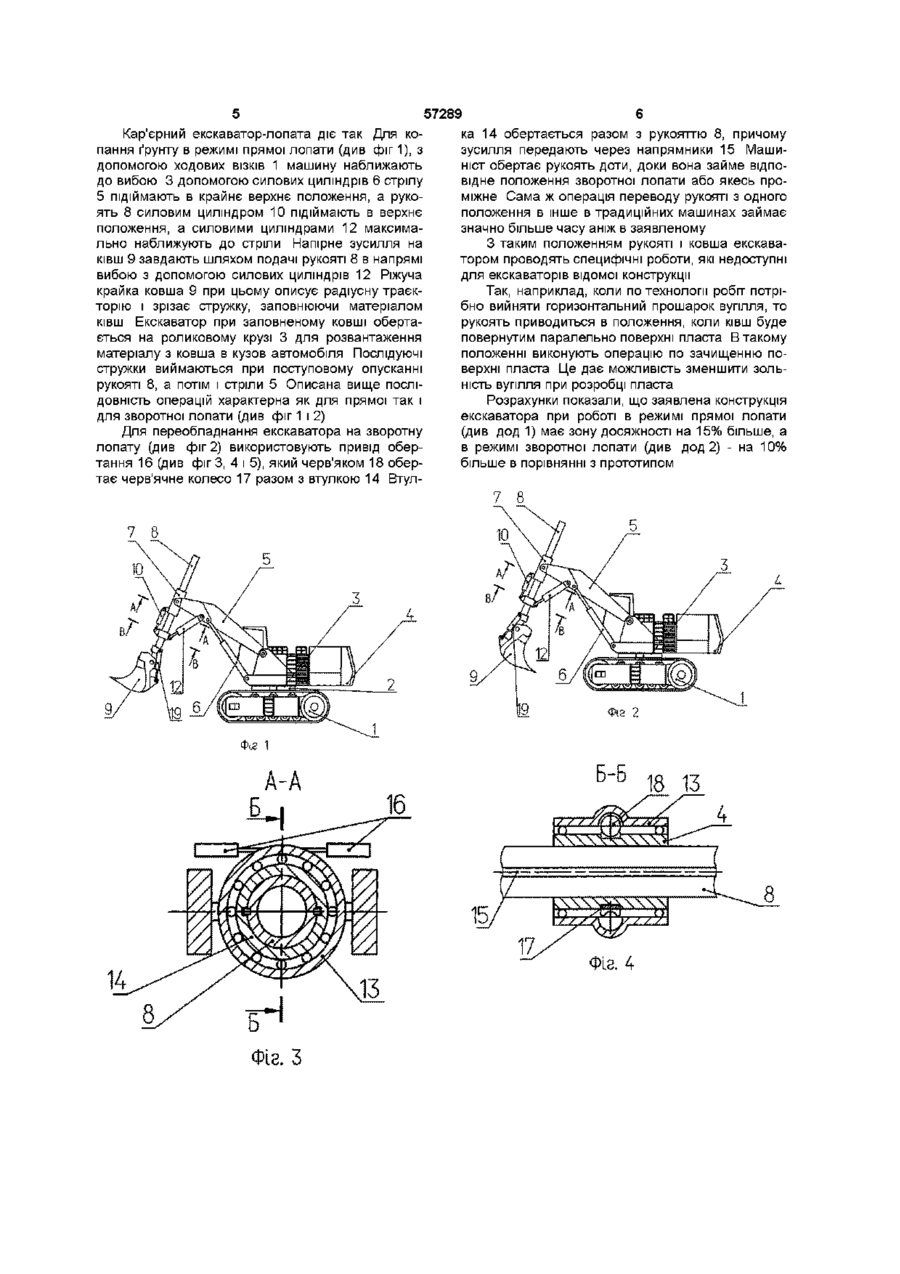
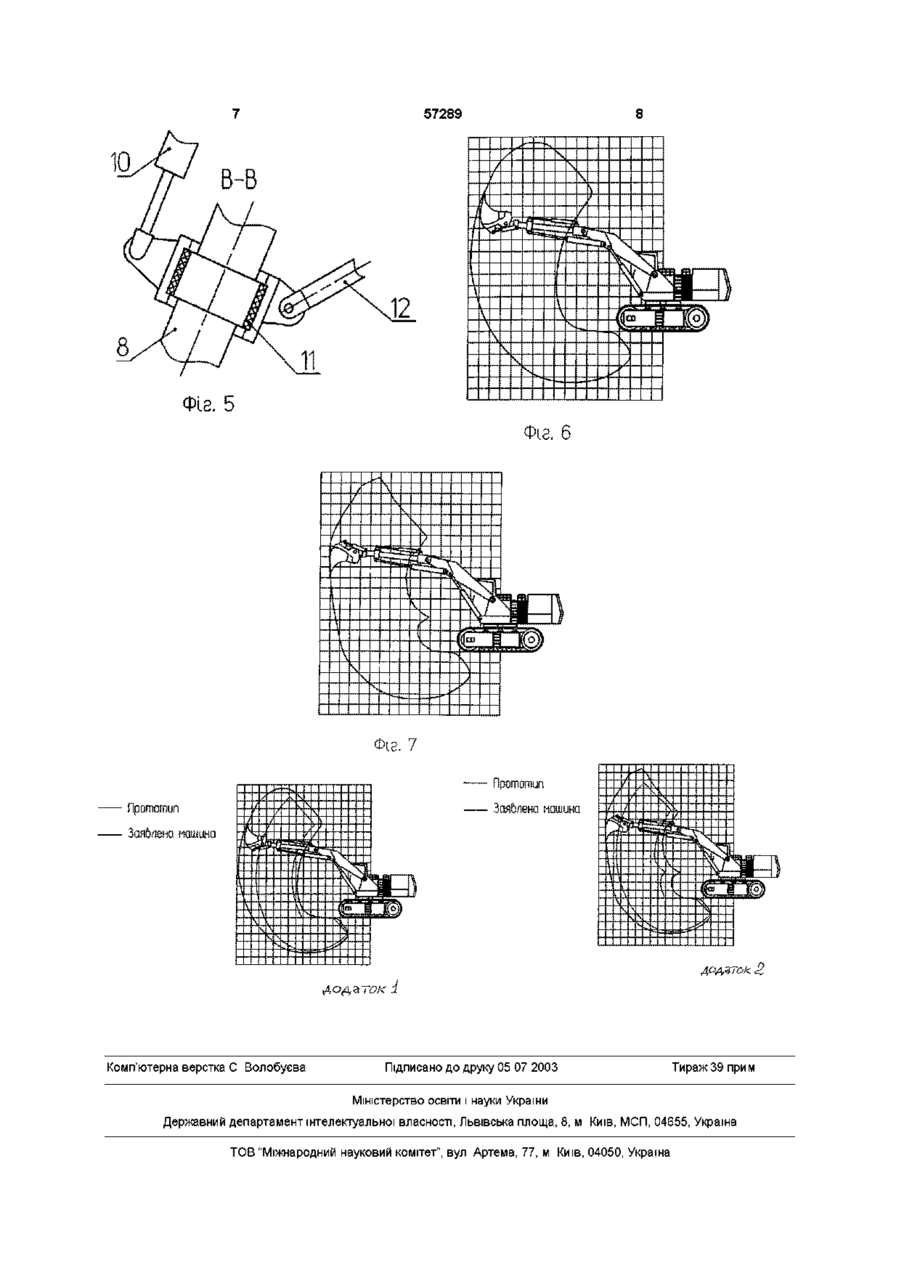
1 Екскаватор з робочим обладнанням лопати, що містить ходові візки з рамою і платформу, що опирається на раму з можливістю обертання і на якій установлена стріла, оснащена приводом хитання рукояті з ковшем, закріпленої на КІНЦІ стріли, який відрізняється тим, що рукоять на стрілі закріплена за допомогою установленого з можливістю хитання опорного вузла, виконаного у вигляді циліндричної оболонки, всередині якої установлена з можливістю обертання циліндрична втулка, що охоплює рукоять, а рукоять виконана з поздовжніми напрямниками, які взаємодіють з напрямними циліндричної втулки і оснащена додатково приводом поздовжнього переміщення, у вигляді силового циліндра 2 Екскаватор по п 1, який відрізняється тим, що в опорному вузлі рукояті встановлений привід обертання циліндричної втулки навколо м поздовжньої осі, виконаний, наприклад, у вигляді черв'ячної пари, колесо якої встановлено на втулці, а черв'як - на оболонці 3 Екскаватор по п 1, який відрізняється тим, що привід хитання рукояті виконаний у вигляді встановлених на стрілі силових циліндрів, штоки яких зв'язані з рукояттю циліндричним шарніром 5 Екскаватор по п 1, який відрізняється тим, що довжина ходу поздовжнього переміщення рукояті визначена за формулою І_р=0,2(Нк+Гк)2хНк/Гк, де Нк - висота копання, Гк - глибина копання Винахід відноситься до галузі землерийних машин і може бути використаний для спорудження землечерпальних машин з покращеними робочими параметрами ВІДОМІ землерийні машини типу екскаваторлопата, які мають ходові візки з рамою На рамі, з можливістю обертання, розміщена платформа, на якій установлена стріла, оснащена приводом хитання рукояті з ковшем, закріпленої на КІНЦІ стріли (див , наприклад, екскаватор ЕХ 3500, фірми "Хітачі", Японія) Дані екскаватори випускаються з можливістю їх експлуатації в виді прямої і зворотної лопати, для чого в комплекті робочого обладнання використовується дві рукояті Для цього необхідно демонтувати одну рукоять, роз'єднати всі гідроліті, установити другу рукоять на стрілу, підключити пдролінм Такі операції потребують значних витрат часу, що на практиці викликає зменшення продуктивності машини Відомий також екскаватор-лопата, в якому частково усунуті недоліки попереднього, і який вклю чає ходові візки з рамою та повертальну платформу, на якій установлені стріла, оснащена приводом хитання рукояті з ковшем, закріпленої на КІНЦІ стріли Кінець рукояті має дві пари провушин, одна пара яких використовується для роботи екскаватора в режимі прямої лопати, а друга - в режимі зворотної лопати (див , наприклад, екскаватор R 984В Litromc, фірми "Лібхерр", Німеччина) По сукупності суттєвих ознак даний екскаватор є найбільш близьким до заявленого і може бути прийнятим за прототип Такі екскаватори теж випускаються з можливістю їх експлуатації в виді прямої і зворотної лопати Для цього необхідно демонтувати рукоять, роз'єднати всі пдролінм, установити рукоять на ІНШІ шарніри, підключити пдролінм Ці операції потребують значних витрат часу, що на практиці викликає небажання переналадки для короткочасних робіт Робота в режимі прямої лопати замість зворотної і навпаки приводить до неповного використання технічних можливостей екскаватора, що спричиняє втрати обсягу робіт Крім того, до недо 00 1 ю 57289 ЛІКІВ прототипу треба віднести складність виборки горизонтальних шарів корисних копалин тому, що для таких операцій необхідно включати в роботу силові циліндри приводу стріли і силові циліндри хитання рукояті, що ускладнює управління екскаватором, збільшує енергетичні витрати на операцію та робить недостатньою робочу зону по довжині В основу винаходу покладена задача створення конструкції екскаватора, яка дозволяє спростити переведення машини з режиму роботи - пряма лопата до режиму - зворотна лопата, а також забезпечити спрощення управління і зниження енергетичних витрат при виборці горизонтальних шарів корисних копалин Ця задача вирішена за рахунок технічного результату, який полягає в тому, що рукоять встановлена з можливістю осьового переміщення та обертання навколо поздовжньої осі Для досягнення цього технічного результату в екскаваторі з робочим обладнанням лопати, що містить ходові візки з рамою та платформу, що спирається на раму з можливістю обертання і на якій установлена стріла, оснащена приводом хитання рукояті з ковшем, закріпленої на КІНЦІ стріли, рукоять на стрілі закріплена за допомогою установленого з можливістю хитання опорного вузла, виконаного у виді циліндричної оболонки, всередині якої установлена з можливістю обертання циліндрична втулка, що охоплює рукоять, а рукоять виконана з поздовжніми напрямниками, взаємодіючими з напрямними циліндричної втулки і оснащена додатково приводом поздовжнього переміщення у вигляді силового циліндра Крім того, в опорному вузлі рукояті встановлено привід обертання циліндричної втулки навколо її поздовжньої осі, виконаний, наприклад, у виді черв'ячної пари, колесо якої встановлено на втулці, а черв'як - на оболонці До того ж, привід хитання рукояті виконано у виді встановлених на стрілі силових циліндрів, штоки яких зв'язані з рукояттю циліндричним шарніром, а довжина ходу поздовжнього переміщення рукояті визначена по формулі, приведеній нижче в тексті заявки Тільки завдяки тому, що рукоять на стрілі закріплена за допомогою установленого з можливістю хитання опорного вузла, виконаного у вигляді циліндричної оболонки, всередині якої установлена з можливістю обертання циліндрична втулка, що охоплює рукоять, а рукоять виконана з поздовжніми напрямниками, взаємодіючими з напрямними циліндричної втулки І оснащена додатково приводом поздовжнього переміщення, у виді силового циліндра, а також завдяки тому, що в опорному вузлі рукояті встановлений привід обертання циліндричної втулки навколо її поздовжньої осі, виконаний, наприклад, у виді черв'ячної пари, колесо якої встановлено на втулці, а черв'як - на оболонці, і привід хитання рукояті виконано у виді встановлених на стрілі силових циліндрів, штоки яких зв'язані з рукояттю циліндричним шарніром, забезпечується можливість осьового переміщення і обертання рукояті навколо поздовжньої осі Все це дає можливість спростити переведення машини з режиму роботи - пряма лопата до режиму - зворотна лопата, а також забезпечити спро щення управління і зниження енергетичних затрат при виборці горизонтальних шарів корисних копалин Такий технічний результат не можна одержати, якщо з наведеної сукупності ознак виключити будь-яку На AT HKM3 розроблено ескізний проект екскаватора ЭГ-10Н, (кресленик 2049 Г-Е) Суть винаходу поясняється кресленнями, де на фіг 1 показано загальний вид екскаватора з робочим обладнанням пряма лопата, на фіг 2 показано загальний вид екскаватора з робочим обладнанням зворотна лопата, на фіг 3 показано переріз по А-А, на фіг 4 показано переріз по Б-Б, на фіг 5 показано переріз по В-В, на фіг 6, 7 - робочі зони ковша екскаватора пряма і зворотна "лопай" на додатку 1 показано робочу зону ковша екскаватора з робочим обладнанням пряма лопата (суцільна ЛІНІЯ - заявлений екскаватор, тонка прототип), на додатку 2 показано робочу зону ковша екскаватора з робочим обладнанням зворотна лопата (суцільна ЛІНІЯ - заявлений екскаватор, тонка прототип) Екскаватор з робочим обладнанням лопати (див фіг 1 і фіг 2) включає ходові візки 1 з рамою 2, що з'єднує між собою два візка і має роликовий круг 3, на який опирається обертальна платформа 4 На обертальній платформі 4 закріплена шарнірно стріла 5, яка установлюється під заданим кутом до горизонту з допомогою силових циліндрів 6, що зв'язують стрілу 5 з платформою 4 На верхньому КІНЦІ стріли установлено, з можливістю хитання, опорний вузол 7, крізь який пропущена рукоять 8, що несе на нижньому КІНЦІ КІВШ 9 Рукоять 8 установлена в опорному вузлі 7 з можливістю обертання навколо поздовжньої осі та переміщення в осьовому напрямі під дією силового циліндра 10, корпус якого закріплено на опорному вузлі 7, а шток на циліндричному шарнірі 11 Для хитання рукояті 8 відносно стріли на останній установлено силові циліндри 12, штоки яких з'єднані з рукояттю циліндричним шарніром 11 (див фіг 5) Опорний вузол 7 виконано (див фіг 3 і 4) у виді циліндричної оболонки 13, всередині якої установлена з можливістю обертання циліндрична втулка 14, що охоплює рукоять 8 Рукоять виконана з поздовжніми напрямниками 15 (див Фіг 4) , взаємодіючими з напрямними циліндричної втулки 14 Для забезпечення керованого обертання рукояті 8 в опорному вузлі 7 встановлено привід обертання 16 циліндричної втулки 14 навколо и поздовжньої осі, виконаний, наприклад, у виді черв'ячної пари, колесо 17 якої встановлено на втулці 14, а черв'як 18 -на оболонці 13 (див фіг 1) Довжина ходу поздовжнього переміщення рукояті 8 в опорному вузлі 7 залежить від параметрів вибою і визначається по формулі І_р = 0,2(Н к +Г к ) 2 х Н к / Г к , де Нк - висота копання, Гк - глибина копання, Ківш 9 на рукояті 8 закріплено шарнірно і для його орієнтації відносно вибою установлено силовий циліндр 19 57289 Кар'єрний екскаватор-лопата діє так Для копання ґрунту в режимі прямої лопати (див фіг 1), з допомогою ходових ВІЗКІВ 1 машину наближають до вибою 3 допомогою силових циліндрів 6 стрілу 5 підіймають в крайнє верхнє положення, а рукоять 8 силовим циліндром 10 підіймають в верхнє положення, а силовими циліндрами 12 максимально наближують до стріли Напірне зусилля на ківш 9 завдають шляхом подачі рукояті 8 в напрямі вибою з допомогою силових циліндрів 12 Ріжуча крайка ковша 9 при цьому описує радіусну траєкторію і зрізає стружку, заповнюючи матеріалом ківш Екскаватор при заповненому ковші обертається на роликовому крузі 3 для розвантаження матеріалу з ковша в кузов автомобіля Послідуючі стружки виймаються при поступовому опусканні рукояті 8, а потім і стріли 5 Описана вище ПОСЛІДОВНІСТЬ операцій характерна як для прямої так і для зворотної лопати (див фіг 1 і 2) Для переобладнання екскаватора на зворотну лопату (див фіг 2) використовують привід обертання 16 (див фіг 3, 4 і 5), який черв'яком 18 обертає черв'ячне колесо 17 разом з втулкою 14 Втул ка 14 обертається разом з рукояттю 8, причому зусилля передають через напрямники 15 Машиніст обертає рукоять доти, доки вона займе відповідне положення зворотної лопати або якесь проміжне Сама ж операція переводу рукояті з одного положення в інше в традиційних машинах займає значно більше часу аніж в заявленому З таким положенням рукояті і ковша екскаватором проводять специфічні роботи, які недоступні для екскаваторів відомої конструкції Так, наприклад, коли по технології робіт потрібно вийняти горизонтальний прошарок вугілля, то рукоять приводиться в положення, коли ківш буде повернутим паралельно поверхні пласта В такому положенні виконують операцію по зачищенню поверхні пласта Це дає можливість зменшити зольність вугілля при розробці пласта Розрахунки показали, що заявлена конструкція екскаватора при роботі в режимі прямої лопати (див дод 1) має зону досяжності на 15% більше, а в режимі зворотної лопати (див дод 2) - на 10% більше в порівнянні з прототипом 7 8 Б-Б 18 13 4 57289 N - / / чїа ? -Aft N ) / щ Ті S Г \ \ \ Ч / N {D ) C V \ > \ ч **— Фіг. 5 — Фіг. 6 Фіг. 7 Прототип Прототип Заяблена иашина ЗояЬшно машина Комп'ютерна верстка С Волобуєва Підписано до друку 05 07 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюExcavator with executive equipment of the shovel
Автори англійськоюDzerzhynskyi Vitalii Oleksandrovych, Tokarev Oleksii Zakharovych, Khorunzhyi Volodymyr Dmytrovych
Назва патенту російськоюЭкскаватор с рабочим оборудованием лопаты
Автори російськоюДзержинский Виталий Александрович, Токарев Алексей Захарович, Хорунжий Владимир Дмитриевич
МПК / Мітки
МПК: E02F 3/30
Мітки: обладнанням, робочим, екскаватор, лопати
Код посилання
<a href="https://ua.patents.su/4-57289-ekskavator-z-robochim-obladnannyam-lopati.html" target="_blank" rel="follow" title="База патентів України">Екскаватор з робочим обладнанням лопати</a>
Робоче обладнання екскаватора-лопати

Номер патенту: 33550
Опубліковано: 15.02.2001
Автори: Вакуленко Анатолій Васильович, Калашніков Олег Юрієвич, Бобух Юрій Георгієвич, Токарєв Олексій Захарович
МПК: E02F 3/30
Мітки: робоче, екскаватора-лопати, обладнання
Текст:
...для запобігання виходу р укояті 5 з сідлового підшипника 4. Упор 9 виконано у вигляді бруска, який закріплено на нижній поверхні рукояті 5 з допомогою осі 10. Упор 9 на осі 10 установлено з можливістю повертання. В робочому стані упор 9 повернутий перпендикулярно поздовжній осі рукояті 5. Довжина упору 9 більша від ширини рукояті, тому при підході до корпусу сідлового підшипника 4 його кінці упираються в бокові щоки корпусу 11 (див. фіг....
Кар’єрний екскаватор-лопата
Номер патенту: 50897
Опубліковано: 15.11.2002
Автори: Грохоткін Валерій Іванович, Токарєв Олексій Захарович, Хорунжий Володимир Дмитрович, Невідомський Володимир Олександрович, Калужський Дмитро Юлійович, Калашніков Олег Юрієвич
МПК: E02F 3/04
Мітки: кар'єрний, екскаватор-лопата
Формула / Реферат:
1. Кар'єрний екскаватор-лопата, що містить ходові візки з рамою та поворотну платформу, на якій установлені стріла, механізм підйому, зв'язаний канатами з ковшем, установленим на рукояті, шарнірно закріпленій на коливній стійці, з якою взаємодіє напірний механізм, установлений на надбудові, який відрізняється тим, що напірний механізм виконаний у вигляді силового циліндра, а коливна стійка - у вигляді тригранної призми, яка одною гранню...
Одноківшовий двогусеничний екскаватор

Номер патенту: 57216
Опубліковано: 16.06.2003
Автори: Бугайов Сергій Семенович, Бугайов Семен Петрович
МПК: E02F 3/28
Мітки: екскаватор, одноківшовий, двогусеничний
Формула / Реферат:
1. Одноківшовий двогусеничний екскаватор /двоходовий/ «пряма лопата», що містить нижню та гусеничні рами, опорно-поворотний пристрій, платформу з механізмами, надбудову, стрілу, сідлові підшипники напірного механізму на стрілі, рукоять, щелепний ківш, який відрізняється тим, що всередині П-подібної нижньої рами між гусеничними ходами розташований пластинчатий конвеєр з прийомним лотком під сідловими підшипниками напірного механізму.2....
Екскаватор-драглайн
Номер патенту: 6732
Опубліковано: 16.05.2005
Автори: Калашніков Олег Юрієвич, Дзержинський Віталій Олександрович, Буренко Олександр Георгійович, Чижик Володимир Васильович, Борніков Леонід Миколайович
МПК: E02F 3/46
Мітки: екскаватор-драглайн
Формула / Реферат:
1. Екскаватор-драглайн, що містить встановлені на поворотній платформі робочі механізми, зрівноважуючий вантаж і стрілу ґратчастої конструкції, на нижньому поясі якої закріплені стійки, на які опирається стягуючий канат, оснащений натяжним пристроєм, який відрізняється тим, що натяжний пристрій виконано тягаревим, при цьому для тягаря використана частина зрівноважуючого вантажу, підвішена до стягуючого каната, пропущеного через систему...
Екскаваторне робоче обладнання телескопічного типу
Номер патенту: 65783
Опубліковано: 15.04.2004
Автори: Соколов Ігор Анатолійович, Сухий Сергій Борисович, Хмара Леонід Андрійович
МПК: E02F 3/36
Мітки: екскаваторне, робоче, обладнання, телескопічного, типу
Формула / Реферат:
Екскаваторне робоче обладнання телескопічного типу, що містить телескопічну стрілу, закріплену на поворотній колонці, телескопічну рукоять, ківш, механізми приводу стріли, рукояті, ковша, яке відрізняється тим, що воно додатково обладнане висувною секцією стріли з механізмом її приводу та додатковою висувною секцією рукояті з механізмом її приводу.
Наступний патент: Спортивна гра з кулями
Випадковий патент: Гідрокумулятивний пристрій