Пристрій для визначення осадки, крену та диференту плавзасобу
Номер патенту: 61049
Опубліковано: 11.07.2011
Автори: Гордєєв Борис Миколайович, Зівенко Олексій Васильович, Жуков Юрій Даниїлович


Формула / Реферат
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що датчики рівня розташовані довільно, але не в одній вертикальній площині, та їх кількість дорівнює трьом.
Текст
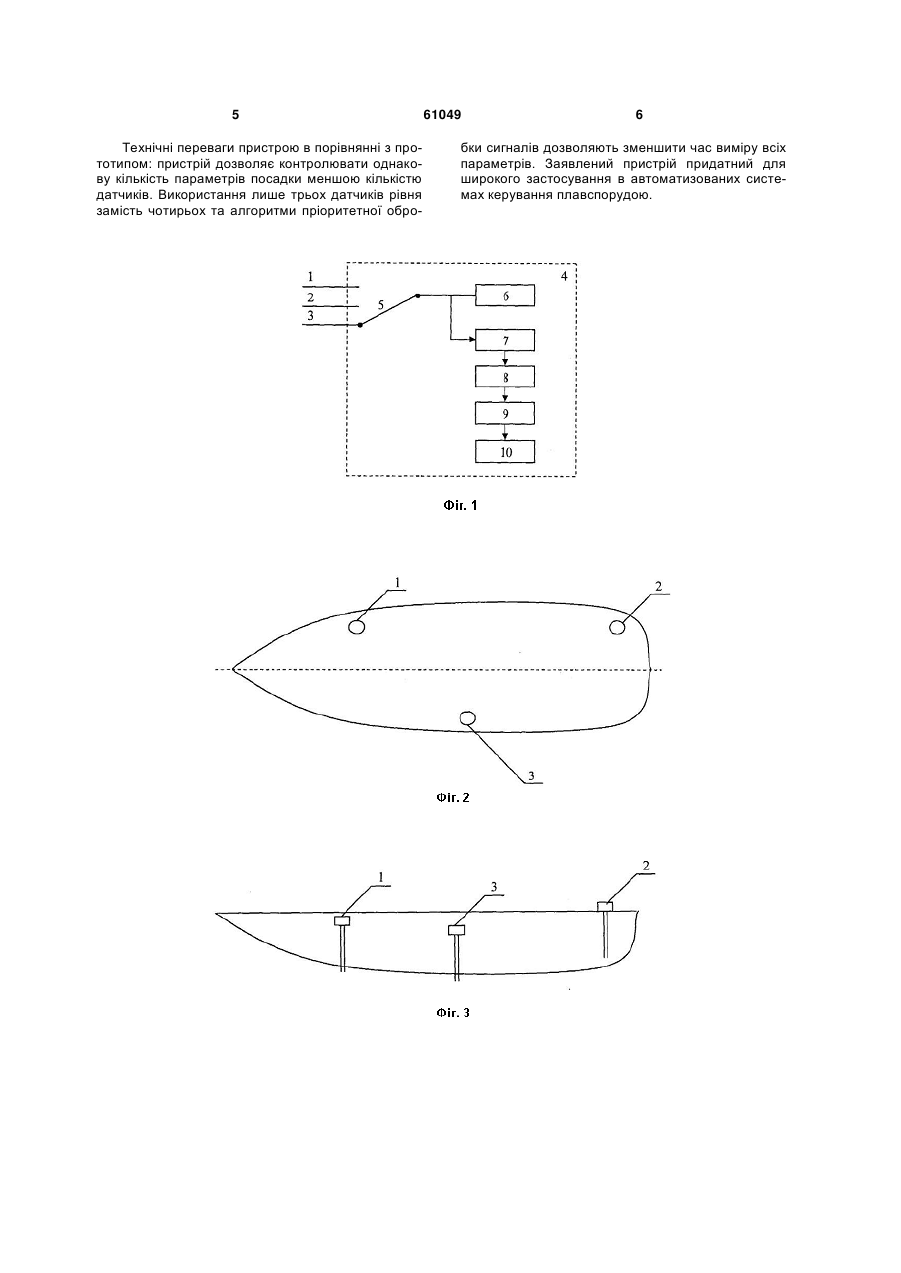
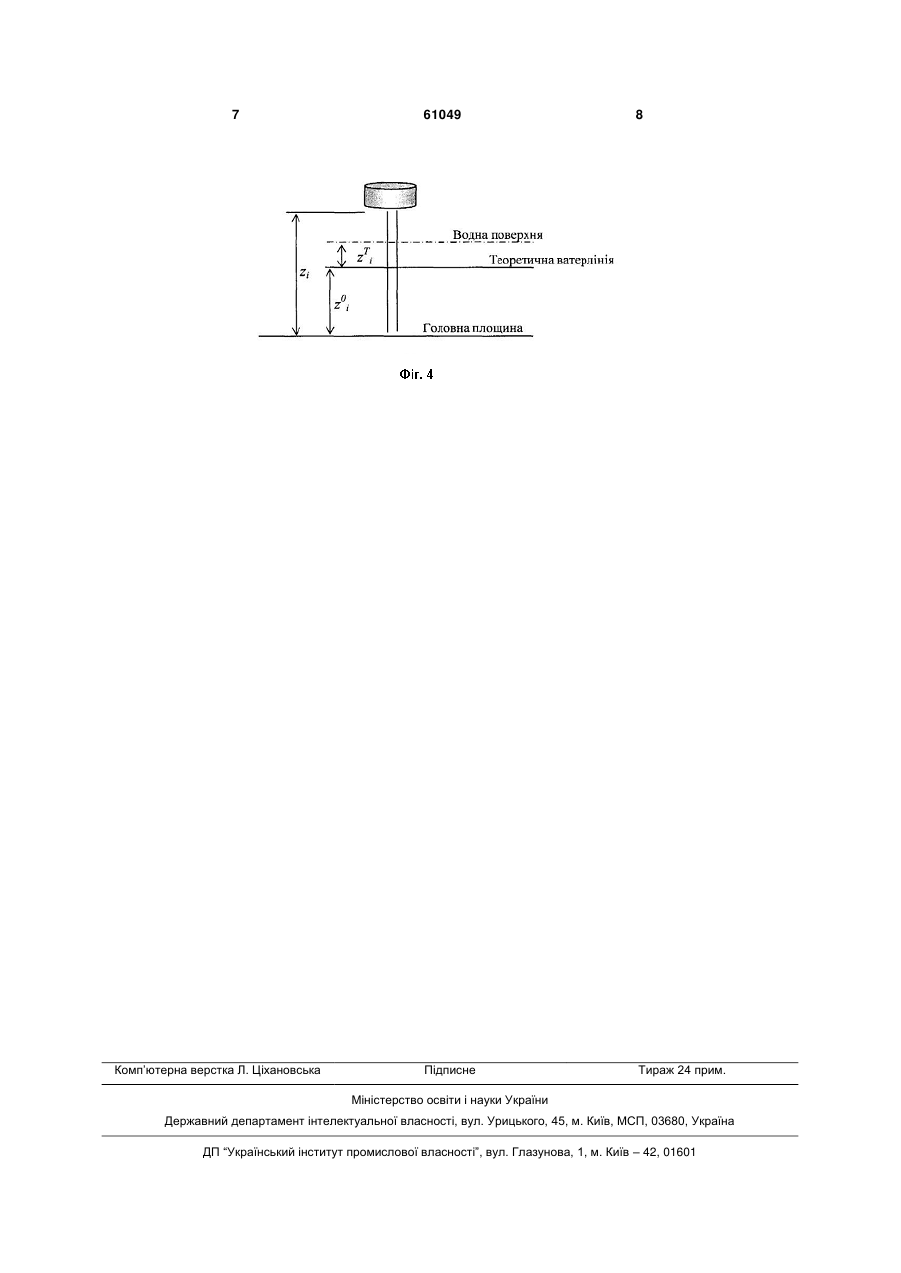
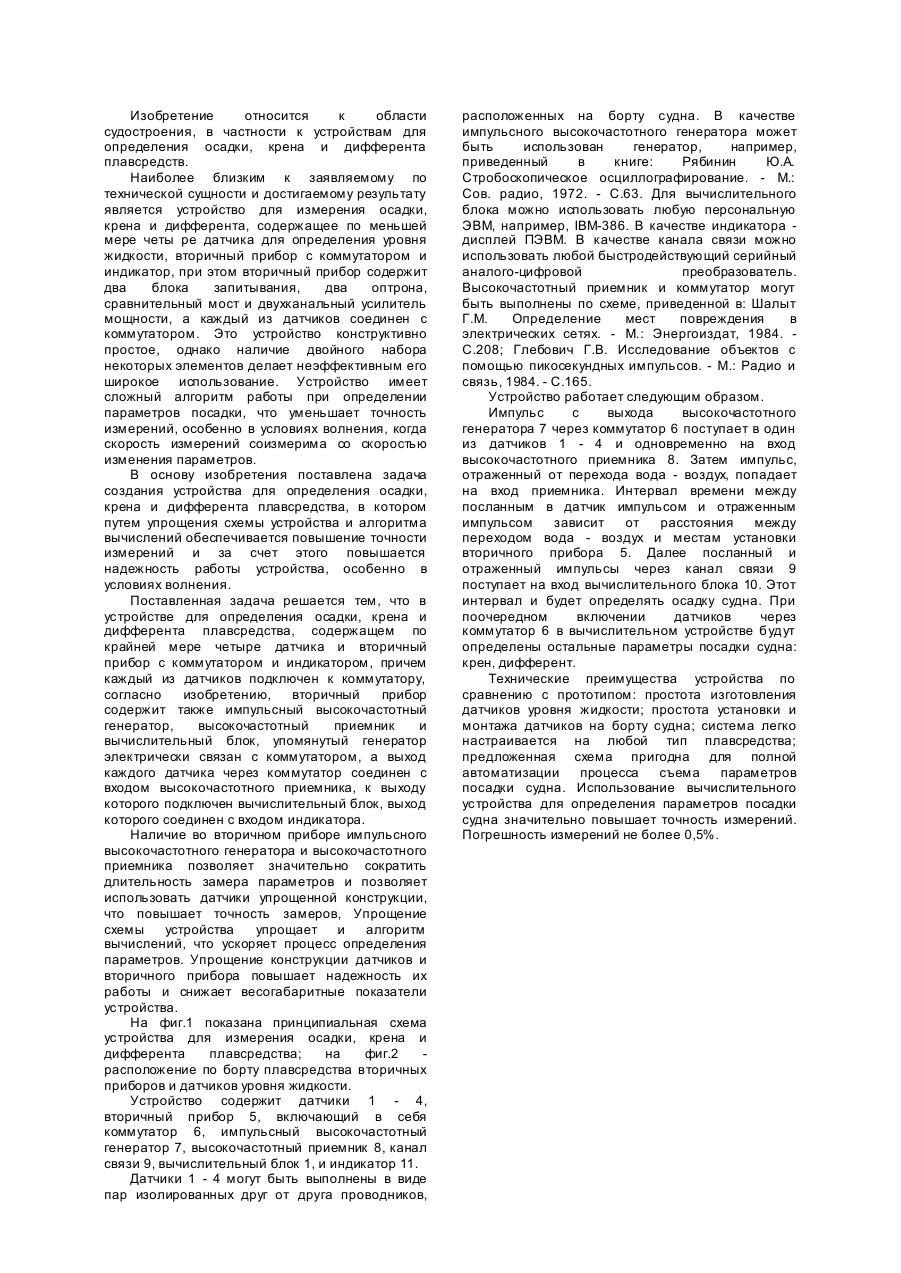
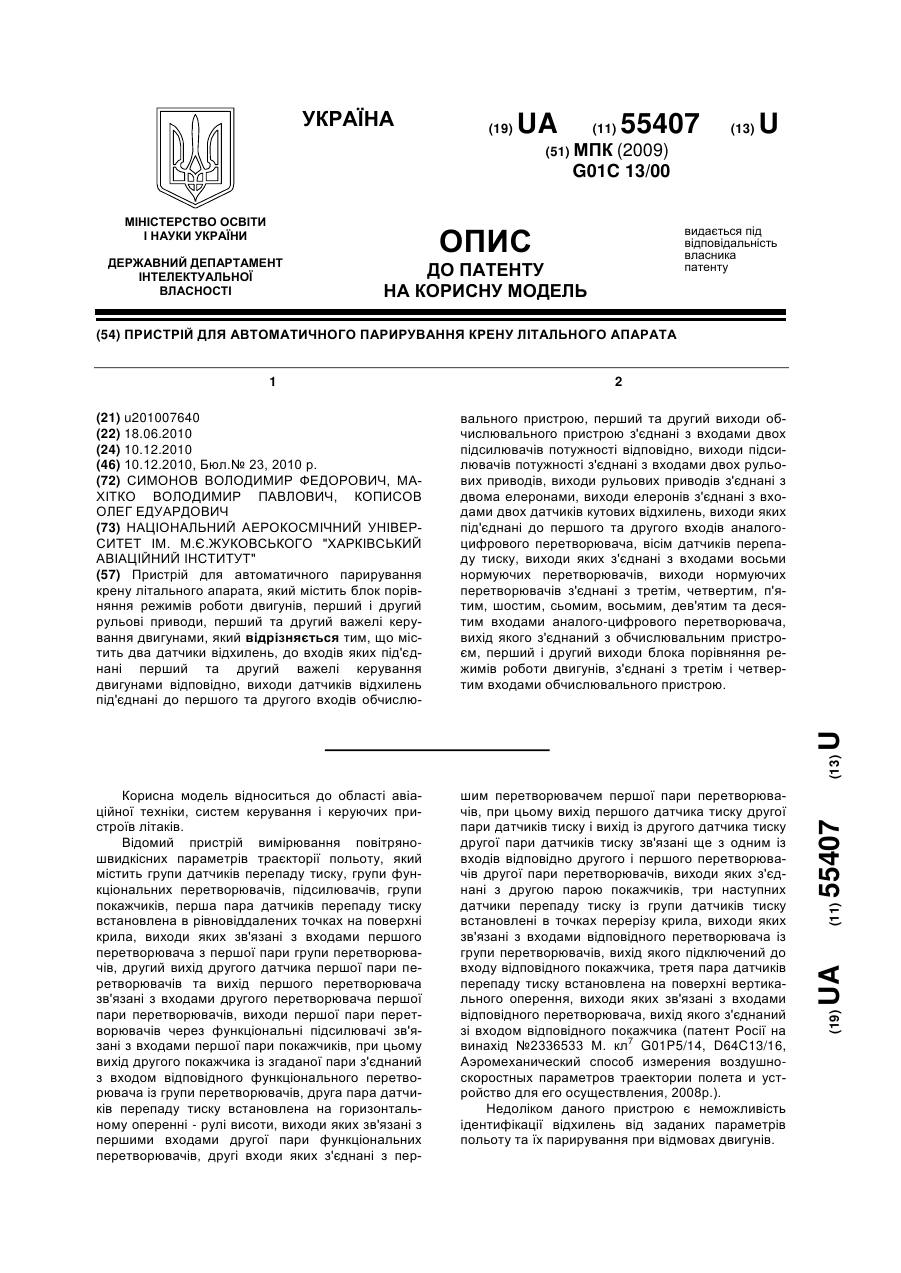
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, 3 61049 трьом. Пристрій визначення осадки, крену та диференту плавзасобу за значеннями відстаней від водної поверхні до датчиків рівня розділу середовищ з використанням лише трьох датчиків передбачає отримання вектора нормалі до водної (горизонтальної) поверхні (Nг) в системі координат плавзасобу (Oxyz). Датчики мають координати: 1(х1, y1, z1); 2(х2,у2, z2) ; 3(х3, у3, z3), що не належать одній вертикальній площині. Кожен датчик вимірює рівень розділу середовищ - відстань від 0 T випромінювача до поверхні води zi+z i+z i, де: zi - висота установки датчика відносно головної площини плавзасобу; 0 z i - висота площини теоретичної ватерлінії (при стандартній осадці); T z i - поточне відхилення висоти поверхні води від розрахункової (при поточних значеннях крену, 4 диференту і осадці плавзасобу). Координати хi, уi 0 zi z i (i=1, 2, 3) - визначаються конструкцією і в процесі експлуатації не змінюються. Таким чином, точки, які визначають площину водної поверхні (горизонту) в системі координат плавзасобу мають координати: 0 T Мi(xі, уі, zi+z i+z i), (i=1,2,3) 0 Віднявши установочні відстані zi+z i, отримуємо координати точок, які лежать на водній поверхні, в системі координат, де горизонтальна площина співпадає з площиною конструктивної ватерлінії. Лінійне рівняння площини водної поверхні в координатах системи, зв'язаної з плавзасобом (відносно х, у, z), має вигляд: Ax+By+Cz+D=0. Коефіцієнти рівняння ( вони визначають площину) обчислюються за формулами: A y 2 z T y 2 z T y1 z T y 3 z T y 3 z T y1 z T ; 3 1 3 2 1 2 B x1 z T x1 z T x 2 z T x 2 z T x 3 z T x 3 z T ; 3 2 1 3 2 1 C x1 y 2 x1 y 3 x 2 y 3 x 2 y 3 x 2 y1 x 3 y1 x 3 y 2 ; D x1 y 2 z T x1 y 3 z T x 2 y1 z T x 3 y1 z T x 2 y 3 z T x 3 y 2 z T ; 3 2 3 2 1 1 Кут крену знаходять як кут між отриманою вище площиною водної поверхні та діаметральною площиною плавзасобу. A A1 B B1 C C1 cos 2 B 2 C 2 A 2 B 2 C2 A 1 1 1 Загальне рівняння діаметральної площини плавзасобу має вигляд: х=0;(тут A1=1, B1=C1=D1=0). Кут крену: A arccos A 2 B 2 C2 Диферент (): B arccos A 2 B 2 C2 Осадку отримують як відстань від заданої точки судна до площини водної поверхні Мн(хн, ун, zн), Мк(хк, ук, zк) - координати носової и кормової марок: A x H B y H C zH D TH ; A 2 B 2 C2 A x K B y K C zK D Tk A 2 B2 C2 Таким чином, за рахунок використання спеціальної схеми розташування датчиків рівня (розташування датчиків відоме заздалегідь в координатах будівельних осей плавзасобу і не належить вертикальній площині) досягається зменшення кількості датчиків на 25%. Всі датчики посадки у своїй роботі використовують метод імпульсної рефлектометри й мають єдине електронне й конструктивне виконання. Використання лише трьох датчиків рівня замість чотирьох та алгоритми пріоритетної обробки сигналів дозволяють зменшити час виміру всіх параметрів, що важливо в умовах сильного хвилювання, або спуску/підйому судна плавдоком. На фіг.1 показано принципову схему пристрою для визначення осадки, крену та диференту плавзасобу. На фіг.2 представлено схему розміщення датчиків, вид зверху. На фіг.3 представлено схему розміщення датчиків, вид збоку. На фіг. 4 представлено позначення висот в термінах датчиків рівня. Пристрій містить датчики рівня 1-3, вторинний прилад 4 містить у собі комутатор 5, високочастотний генератор 6 та приймач 7, послідовно з'єднані каналом зв'язку 8, обчислювальний блок 9 та індикатор 10. Датчики 1-3, вторинний прилад можуть бути виконані як зазначено в найближчому аналозі. Пристрій працює наступним чином. Зондувальний імпульс із виходу високочастотного генератора 6 через комутатор 5 надходить в один із датчиків 1-3 (вибір датчика визначається спеціальним алгоритмом обчислювального пристрою 9) і одночасно на вхід високочастотного приймача 7. Потім імпульс, відбитий від неоднорідності вода-повітря (або кінця датчика), потрапляє на вхід приймача 7. Інтервал часу між зондувальним і відбитим імпульсами залежить від відстані між переходом водаповітря й місцем установки вторинного приладу 4. Далі зондувальний і відбитий імпульси через канал зв'язку 8 надходять на вхід обчислювального блоку 9, представляючи таким чином рефлектограму датчика. На підставі обмірюваного інтервалу часу обчислювальний блок 9 розраховує відстані до водної поверхні. Розраховані значення осадки та кутів крену і диференту, візуальна сигналізація критичних значень параметрів відображаються на індикаторі 10. 5 Технічні переваги пристрою в порівнянні з прототипом: пристрій дозволяє контролювати однакову кількість параметрів посадки меншою кількістю датчиків. Використання лише трьох датчиків рівня замість чотирьох та алгоритми пріоритетної обро 61049 6 бки сигналів дозволяють зменшити час виміру всіх параметрів. Заявлений пристрій придатний для широкого застосування в автоматизованих системах керування плавспорудою. 7 Комп’ютерна верстка Л. Ціхановська 61049 8 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining draft, heel and trim of vessel
Автори англійськоюHordeiev Borys Mykolaiovych, Zhukov Yurii Danylovych, Zivenko Oleksii Vasyliovych
Назва патенту російськоюУстройство для определения осадки, крена и дифферента плавсредства
Автори російськоюГордеев Борис Николаевич, Жуков Юрий Данилович, Зивенко Алексей Васильевич
МПК / Мітки
МПК: B63B 39/00
Мітки: осадки, визначення, плавзасобу, крену, пристрій, диференту
Код посилання
<a href="https://ua.patents.su/4-61049-pristrijj-dlya-viznachennya-osadki-krenu-ta-diferentu-plavzasobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення осадки, крену та диференту плавзасобу</a>
Пристрій для визначення осадки, крену і диференту плавзасобу
Номер патенту: 18570
Опубліковано: 25.12.1997
Автори: Гордєєв Борис Миколайович, Алєксандров Михайло Миколайович, Половніков Валєрій Алєксандровіч, Жуков Юрій Даниїлович
МПК: B63B 39/00
Мітки: плавзасобу, пристрій, визначення, крену, диференту, осадки
Формула / Реферат:
Устройство для определения осадки, крена и дифферента плавсредства, содержащее по меньшей мере четыре датчика и вторичный прибор с коммутатором и индикатором, причем каждый из датчиков подключен к коммутатору, отличающееся тем, что вторичный прибор содержит вычислительный блок им последовательно соединенные импульсный высокочастотный генератор и высокочастотный приемник, причем упомянутый генератор электрически связан с коммутатором, а выход...
Пристрій для автоматичного парирування крену літального апарата
Номер патенту: 55407
Опубліковано: 10.12.2010
Автори: Симонов Володимир Федорович, Махітко Володимир Павлович, Кописов Олег Едуардович
МПК: G01C 13/00
Мітки: автоматичного, крену, парирування, літального, апарата, пристрій
Формула / Реферат:
Пристрій для автоматичного парирування крену літального апарата, який містить блок порівняння режимів роботи двигунів, перший і другий рульові приводи, перший та другий важелі керування двигунами, який відрізняється тим, що містить два датчики відхилень, до входів яких під'єднані перший та другий важелі керування двигунами відповідно, виходи датчиків відхилень під'єднані до першого та другого входів обчислювального пристрою, перший та другий...
Маятниковий прилад визначення кутів тангажа і крену рухомого об’єкта (двокоординатний маятник карпачева)
Номер патенту: 56900
Опубліковано: 25.01.2011
Автори: Карпачев Юрій Андрійович, Гусєв Алексій Володимирович, Рудик Юрій Микитович
МПК: G01B 7/00
Мітки: маятниковий, тангажа, крену, прилад, карпачева, кутів, визначення, об'єкта, рухомого, двокоординатний, маятник
Формула / Реферат:
Маятниковий прилад визначення кутів тангажа і крену рухомого об'єкта, що містить кардановий підвіс, на осьовий шарнір якого підвішений фізичний маятник, на зовнішній осі карданового підвісу встановлений датчик кута тангажа, а на його внутрішній осі встановлений датчик кута крену, який відрізняється тим, що на осі карданового підвісу встановлені статично урівноважені триланкові сателітні механізми з датчиками кута на сателітах, а прилад...
Маятниковий прилад для визначення вертикалі землі та кутів тангажу і крену на рухомому об’єкті (маятник карпачева)

Номер патенту: 56722
Опубліковано: 25.01.2011
Автор: Карпачев Юрій Андрійович
МПК: G01B 7/00
Мітки: маятниковий, вертикалі, кутів, рухомому, тангажу, маятник, об'єкти, визначення, карпачева, крену, прилад, землі
Формула / Реферат:
1. Маятниковий прилад для визначення вертикалі Землі та кутів тангажу і крену на рухомому об'єкті, який містить однокоординатний фізичний маятник, механічно з'єднаний з датчиком кута, датчиком моменту, демпфером механічних коливань та посилювачем зворотного зв'язку, причому датчик кута маятника жорстко з'єднаний з основою рухомого об'єкта, який відрізняється тим, що він додатково містить триланковий сателітний механізм, в якому вісь...
Система охолодження силової установки плавзасобу
Номер патенту: 80569
Опубліковано: 10.10.2007
Автори: Федоровський Костянтин Юрійович, Владецький Дмитро Олегович
МПК: B63H 21/00, F01P 3/20
Мітки: система, плавзасобу, установки, охолодження, силової
Формула / Реферат:
1. Система охолодження силової установки плавзасобу, що включає в себе омиваний забортною водою теплообмінник, у нижній частині котрого уздовж його теплообмінних поверхонь встановлені в забортній воді перфоровані газові колектори, з'єднані трубопроводом з джерелом стиснутого газу, яка відрізняється тим, що над теплообмінником встановлений газозбірний пристрій, з'єднаний трубопроводом з джерелом стиснутого газу з утворенням контуру циркуляції...
Попередній патент: Модуль для піролізу органічних побутових відходів
Наступний патент: Спосіб контролю критичної забрудненості масляного фільтра з основним фільтруючим елементом і фільтруючим елементом перепускного клапана
Випадковий патент: Активатор вулканізації