Пристрій для автоматичного парирування крену літального апарата
Номер патенту: 55407
Опубліковано: 10.12.2010
Автори: Симонов Володимир Федорович, Махітко Володимир Павлович, Кописов Олег Едуардович
Формула / Реферат
Пристрій для автоматичного парирування крену літального апарата, який містить блок порівняння режимів роботи двигунів, перший і другий рульові приводи, перший та другий важелі керування двигунами, який відрізняється тим, що містить два датчики відхилень, до входів яких під'єднані перший та другий важелі керування двигунами відповідно, виходи датчиків відхилень під'єднані до першого та другого входів обчислювального пристрою, перший та другий виходи обчислювального пристрою з'єднані з входами двох підсилювачів потужності відповідно, виходи підсилювачів потужності з'єднані з входами двох рульових приводів, виходи рульових приводів з'єднані з двома елеронами, виходи елеронів з'єднані з входами двох датчиків кутових відхилень, виходи яких під'єднані до першого та другого входів аналого-цифрового перетворювача, вісім датчиків перепаду тиску, виходи яких з'єднані з входами восьми нормуючих перетворювачів, виходи нормуючих перетворювачів з'єднані з третім, четвертим, п'ятим, шостим, сьомим, восьмим, дев'ятим та десятим входами аналого-цифрового перетворювача, вихід якого з'єднаний з обчислювальним пристроєм, перший і другий виходи блока порівняння режимів роботи двигунів, з'єднані з третім і четвертим входами обчислювального пристрою.
Текст
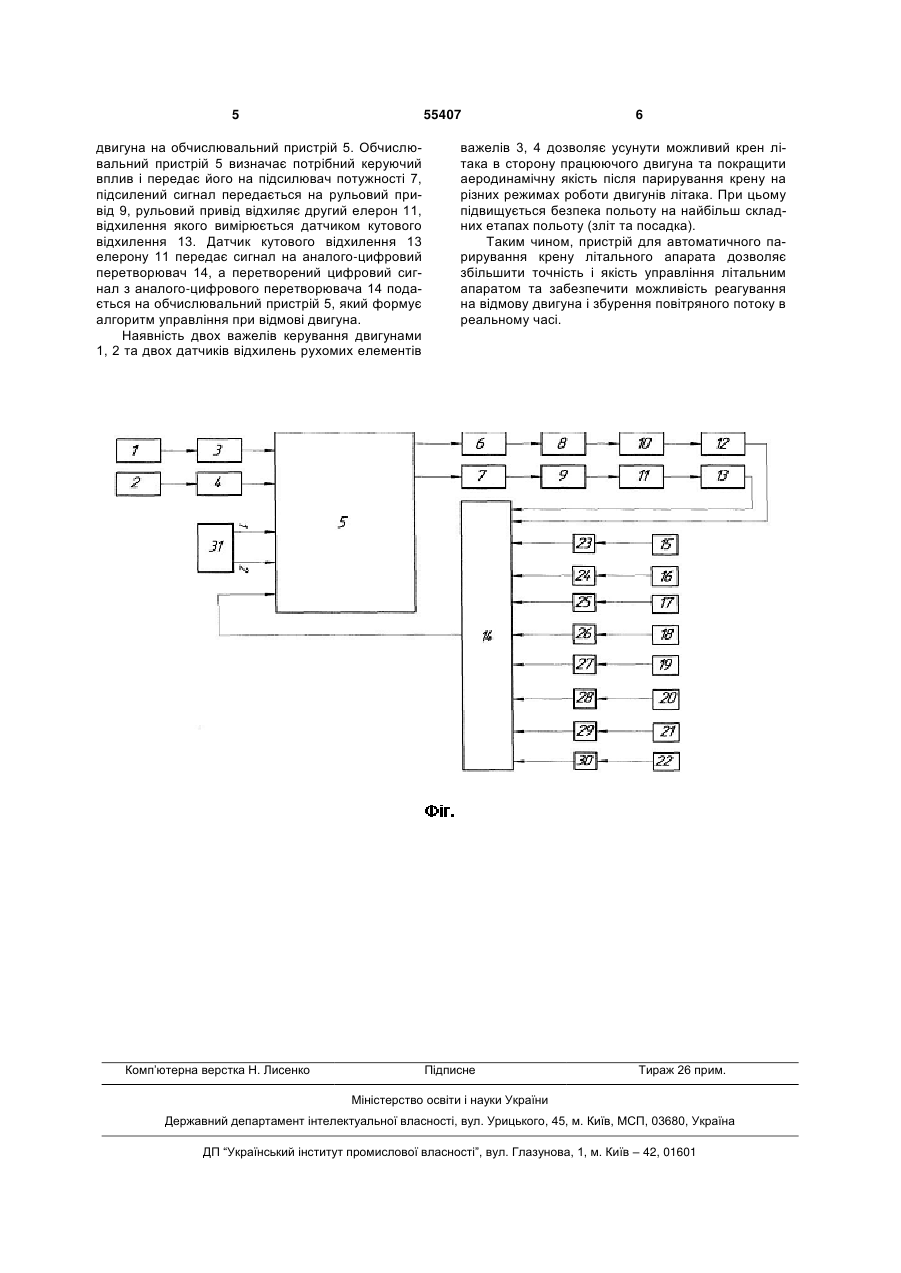
Пристрій для автоматичного парирування крену літального апарата, який містить блок порівняння режимів роботи двигунів, перший і другий рульові приводи, перший та другий важелі керування двигунами, який відрізняється тим, що містить два датчики відхилень, до входів яких під'єднані перший та другий важелі керування двигунами відповідно, виходи датчиків відхилень під'єднані до першого та другого входів обчислю 3 Відомий найбільш близький та вибраний в як прототип пристрій для автоматичного парирування крену літального апарата при відмовах двигунів (патент СССР на изобретение №1838178 М.кл6. В64С13/16, Устройство для автоматического парирования крена летательного апарата при от казах двигателей, Бюл. №32, 1993р.), який містить блок порівняння режимів роботи двигунів, перший, другий, третій ключі, послідовно з'єднані логічний елемент «або», перший вхід якого з'єднаний з другим виходом блока порівняння режимів роботи двигунів і керуючим входом першого ключа, а другий вхід з'єднаний з першим виходом блока порівняння режимів роботи двигунів і керуючим входом другого ключа, блок затримки, вихід якого з'єднаний з керуючим входом третього ключа, послідовно з'єднані перший суматор і перший рульовий привід, вихід якого по сигналу зворотнього зв'язку з'єднаний з другим входом першого суматора, послідовно з'єднані другий суматор і другий рульовий привід, вихід якого по сигналу зворотнього зв'язку з'єднаний з другим входом другого суматора, послідовно з'єднані резистор, перший вивід якого з'єднаний з позитивною шиною джерела живлення, та інтегратор, вихід якого з'єднаний через замикаючі контакти першого ключа з першим входом першого суматора, а через замикаючі контакти другого ключа з'єднаний з першим входом другого суматора, вхід інтегратора з'єднаний також з замикаючим контактом третього ключа, перший та другий важелі керування двигунами, четвертий та п'ятий ключі, керуючі входи яких з'єднані відповідно з першим і другим виходами блока порівняння режимів роботи двигунів, перший і другий змінні резистори, перші виводи яких з'єднані з негативною шиною джерела живлення, другі виводи з'єднані зі спільною точкою джерела живлення, а повзуни механічно з'єднані відповідно з першим та другим важелями керування двигунами і електрично з'єднані відповідно через замикаючі контакти четвертого та п'ятого ключів з рухомим контактом третього ключа. Недоліком даного пристрою є відсутність можливості парирування збурення повітряного потоку, низька якість і точність. Задачею корисної моделі є збільшення точності і якості управління літальним апаратом та забезпечення можливості реагування на відмову двигуна і збурення повітряного потоку в реальному часі. Поставлена задача вирішується тим, що в пристрій для автоматичного парирування крену літального апарата який містить блок порівняння режимів роботи двигунів, перший і другий рульові приводи, перший та другий важелі керування двигунами, відповідно до корисної моделі введено два датчики відхилень, до входів яких під'єднані перший та другий важелі керування двигунами відповідно, виходи датчиків під'єднані до першого та другого входів обчислювального пристрою, перший та другий виходи обчислювального пристрою з'єднані з входами двох підсилювачів потужності відповідно, виходи підсилювачів потужності з'єднані з входами двох рульових приводів, виходи рульових приводів з'єднані з двома елеронами, 55407 4 виходи елеронів з'єднані з входами двох датчиків кутових відхилень, виходи яких під'єднані до першого та другого входів аналого-цифрового перетворювача, вісім датчиків перепаду тиску, виходи яких з'єднані з входами восьми нормуючих перетворювачів, виходи нормуючих перетворювачів з'єднані з третім, четвертим, п'ятим, шостим, сьомим, восьмим, дев'ятим та десятим входами аналого-цифрового перетворювача, вихід якого знаний з обчислювальним пристроєм, перший і другий вихід блока порівняння режимів роботи двигунів, з'єднані з третім і четвертим входами обчислювального пристрою. На Фіг. наведена загальна блок-схема запропонованого пристрою автоматичного парирування крену літального апарата. Пристрій для автоматичного парирування крену літального апарата, який містить два важелі керування двигунами 1, 2, до яких під'єднані два датчики відхилень рухомих елементів важелів 3, 4. Виходи датчиків відхилення рухомих елементів 3, 4 під'єднані до першого та другого входів обчислювального пристрою 5. Виходи обчислювального пристрою 5 з'єднані з входами підсилювачів потужності 6, 7. Виходи підсилювачів потужності 6, 7 з'єднані з входами рульових приводів 8, 9 відповідно. Виходи рульових приводів 8, 9 з'єднані з елеронами 10, 11 відповідно. Кути відхилення елеронів 10, 11 вимірюються за допомогою датчиків кутових відхилень 12, 13. Виходи датчиків 12, 13, які пропорційні кутам відхилень елеронів, під'єднані до аналого-цифрового перетворювача 14. Виходи восьми датчиків перепаду тиску 15, 16, 17, 18, 19, 20, 21, 22 з'єднані з нормуючими перетворювачами 23, 24, 25, 26, 27, 28, 29, 30. Виходи нормуючих перетворювачів 23, 24, 25, 26, 27, 28, 29, 30 з'єднані з входами аналого-цифрового перетворювача 14. Вихід аналого-цифрового перетворювача 14 з'єднаний з обчислювальним пристроєм 5. Два виходи блока порівняння режимів роботи двигунів 31 з'єднані з обчислювальним пристроєм 5. Пристрій працює наступним чином. При дії потоку повітря, із-за якого відбувається перепад тиску, наприклад, під правим крилом літака, зміну тиску регіструють датчики перепаду тиску 15, 16, 17, 18. Аналогові вихідні сигнали з датчиків 15, 16, 17, 18 передаються на нормуючі перетворювачі 23, 24, 25, 26, які перетворюють їх в діапазон напруг для роботи аналого-цифрового перетворювача 14. Цифровий сигнал з аналогоцифрового перетворювача 14 передається до обчислювального пристрою 5, який обробляє отриману інформацію і формує відповідний сигнал управління і передає його на підсилювач потужності 6, з якого підсилений сигнал передається на рульовий привід 8. Рульовий привід 8 відхиляє перший елерон 10, відхилення якого вимірюється датчиком кутового відхилення 12, сигнал з якого через аналого-цифровий перетворювач 14 подається до обчислювального пристрою 5, за допомогою якого мінімізується вплив перепаду тиску. Коли відбувається відмова одного із двигунів, наприклад, лівого, блок порівняння режимів роботи двигунів 31 формує сигнал про відмову лівого 5 55407 двигуна на обчислювальний пристрій 5. Обчислювальний пристрій 5 визначає потрібний керуючий вплив і передає його на підсилювач потужності 7, підсилений сигнал передається на рульовий привід 9, рульовий привід відхиляє другий елерон 11, відхилення якого вимірюється датчиком кутового відхилення 13. Датчик кутового відхилення 13 елерону 11 передає сигнал на аналого-цифровий перетворювач 14, а перетворений цифровий сигнал з аналого-цифрового перетворювача 14 подається на обчислювальний пристрій 5, який формує алгоритм управління при відмові двигуна. Наявність двох важелів керування двигунами 1, 2 та двох датчиків відхилень рухомих елементів Комп’ютерна верстка Н. Лиcенко 6 важелів 3, 4 дозволяє усунути можливий крен літака в сторону працюючого двигуна та покращити аеродинамічну якість після парирування крену на різних режимах роботи двигунів літака. При цьому підвищується безпека польоту на найбільш складних етапах польоту (зліт та посадка). Таким чином, пристрій для автоматичного парирування крену літального апарата дозволяє збільшити точність і якість управління літальним апаратом та забезпечити можливість реагування на відмову двигуна і збурення повітряного потоку в реальному часі. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated parry of aircraft tilt
Автори англійськоюSymonov Volodymyr Fedorovych, Makhitko Volodymyr PAvlovych, Kopysov Oleh Eduardovych
Назва патенту російськоюУстройство для автоматического парирования крена летательного аппарата
Автори російськоюСимонов Владимир Федорович, Махитко Владимир Павлович, Кописов Олег Эдуардович
МПК / Мітки
МПК: G01C 13/00
Мітки: крену, апарата, автоматичного, літального, пристрій, парирування
Код посилання
<a href="https://ua.patents.su/3-55407-pristrijj-dlya-avtomatichnogo-pariruvannya-krenu-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного парирування крену літального апарата</a>
Пристрій для автоматичного парирування крену літального апарата при відмовах двигунів
Номер патенту: 19069
Опубліковано: 25.12.1997
Автори: Старинський Віктор Васильович, Мухін Євген Георгійович
МПК: B64C 13/00
Мітки: парирування, автоматичного, відмовах, апарата, пристрій, літального, крену, двигунів
Формула / Реферат:
Устройство для автоматического парирования крена летательного аппарата при отказах двигателей, содержащее блок сравнения режимов работы двигателей, первый, второй, третий ключи, последовательно соединенные логический элемент ИЛИ, первый вход которого соединен со вторым выходом блока сравнения режимов работы двигателей и управляющим входом первого ключа, а второй вход соединен с первым выходом блока сравнения режимов работы двигателей и...
Пристрій автоматичного управління спрацюванням палива літального апарата

Номер патенту: 9861
Опубліковано: 30.09.1996
Автори: Борисевич Володимир Павлович, Попов Валентин Георгійович, Спірідонов Владімір Ніколаєвіч, Соколовський Микола Миколайович, Торгов Юрій Фьодоровіч
МПК: B64D 37/00
Мітки: автоматичного, пристрій, палива, літального, апарата, спрацюванням, управління
Формула / Реферат:
(57) Устройство автоматического управления выработкой топлива летательного аппарата, содержащее установленные в каналах управления выработкой из трех очередей насосы, датчики уровня и давления топлива в баках, логические элементы "И-НЕ", "ИЛИ-НЕ", счетчик времени, усилители, коммутационные элементы, отличающееся тем, что в нем канал управления выработкой топлива первой очереди снабжен дополнительным логическим элементом...
Система автоматичного керування, контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 48884
Опубліковано: 15.02.2005
Автори: Безсчастний Микола Олексійович, БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: керування, установки, апарата, система, контролю, автоматичного, літального, реєстрації, параметрів, силової
Формула / Реферат:
Группа изобретений относится к области получения энергии за счет естественных факторов. Энергокомплекс имеет воздушную тяговую гелиоприемную трубу в виде трубопровода, проложенного по горному образованию. В трубе установлена первая ветротурбина. Выход трубы расположен на уровне холодного атмосферного воздуха. Секция подогрева насыщенного парами воды воздушного потока расположена на входе трубы возле подножия горы. На конечном участке трубы...
Система керування безпілотного літального апарата
Номер патенту: 53726
Опубліковано: 11.10.2010
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Єрмакова Вікторія Валеріївна, Бекетов Антон Сергійович, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: літального, безпілотного, керування, апарата, система
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, апарата, літального, система, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Попередній патент: Електричний нагрівач
Наступний патент: Система автоматичного виявлення місцезнаходження рухомого об’єкта
Випадковий патент: Сушильна установка