Маятниковий прилад визначення кутів тангажа і крену рухомого об’єкта (двокоординатний маятник карпачева)
Номер патенту: 56900
Опубліковано: 25.01.2011
Автори: Гусєв Алексій Володимирович, Карпачев Юрій Андрійович, Рудик Юрій Микитович
Формула / Реферат
Маятниковий прилад визначення кутів тангажа і крену рухомого об'єкта, що містить кардановий підвіс, на осьовий шарнір якого підвішений фізичний маятник, на зовнішній осі карданового підвісу встановлений датчик кута тангажа, а на його внутрішній осі встановлений датчик кута крену, який відрізняється тим, що на осі карданового підвісу встановлені статично урівноважені триланкові сателітні механізми з датчиками кута на сателітах, а прилад додатково містить обчислювач для визначення кутів ![]() (тангажа) і
(тангажа) і ![]() (крену) рухомого об'єкта у відповідності з алгоритмами:
(крену) рухомого об'єкта у відповідності з алгоритмами:
![]() ,
,
![]() ,
,
де ![]() - показники (в радіанах) датчика кута зовнішньої осі карданового підвісу;
- показники (в радіанах) датчика кута зовнішньої осі карданового підвісу;
![]() - показники датчика кута сателіта зовнішньої осі карданового підвісу;
- показники датчика кута сателіта зовнішньої осі карданового підвісу;
![]() - показники датчика кута внутрішньої осі карданового підвісу;
- показники датчика кута внутрішньої осі карданового підвісу;
![]() - показники датчика кута сателіта внутрішньої осі карданового підвісу;
- показники датчика кута сателіта внутрішньої осі карданового підвісу;
![]() ,
,
де ![]() - радіус датчиків кутів осей карданового підвісу;
- радіус датчиків кутів осей карданового підвісу;
![]() - радіус датчиків кутів сателітів.
- радіус датчиків кутів сателітів.
Текст
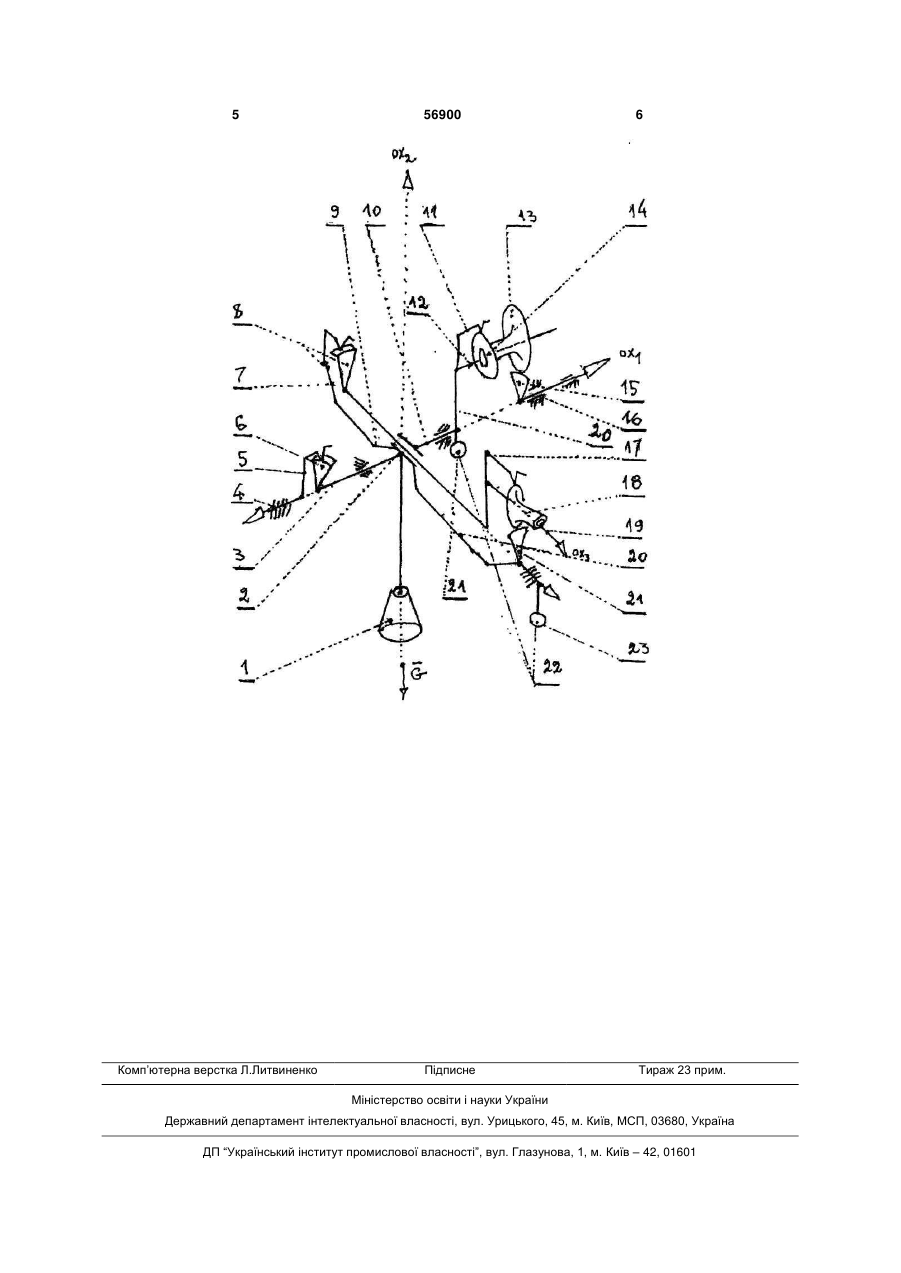
Маятниковий прилад визначення кутів тангажа і крену рухомого об'єкта, що містить кардановий підвіс, на осьовий шарнір якого підвішений фізичний маятник, на зовнішній осі карданового підвісу встановлений датчик кута тангажа, а на його внутрішній осі встановлений датчик кута крену, який відрізняється тим, що на осі карданового підвісу встановлені статично урівноважені триланкові сателітні механізми з датчиками кута на сателітах, а прилад додатково містить обчислювач для визна чення кутів (тангажа) і (крену) рухомого об'єкта у відповідності з алгоритмами: k21 2 , Корисна модель відноситься до приладобудування, а саме до приладів і пристроїв визначення кутів тангажа і крену рухомих об'єктів (літаків, ракет, кораблів, наземного автотранспорту та ін.). Вважається, що об'єкт рухається з прискоренням і крім того, робить обертовий рух. Найближчим аналогом корисної моделі є гіроскопічний авіагоризонт АГБ-3 (АГБ-3к), який призначений для визначення кутів тангажа і крену літаків [О.М. Михайлов. Авиационные приборы. М., Машиностроение. 1997 г., стр. 102-105]. Недоліком найближчого аналога є його складність, ненадійність та, найголовніше, залежність показань від лінійного прискорення руху об'єкта, тобто наявність у показаннях приладу так званих балістичних девіацій, що призводить до великих помилок визначення кутів тангажа і крену об'єкта. Ця корисна модель виключає згадані недоліки найближчого аналога. Задачею корисної моделі є створення маятникового приладу визначення кутів тангажа і крену рухомого об'єкта, який дозволив би підвищити його надійність за рахунок зменшення залежності показань маятника від лінійного прискорення руху об'єкта шляхом нівелювання так званих балістичних девіацій, які призводять до помилок у визначенні кутів тангажа і крену рухомого об'єкта. Поставлена задача вирішується тим, що в маятниковому приладі визначення кутів тангажа і крену рухомого об'єкта (двокоординатний маятник Карпачова), який містить карданів підвіс, на осьовий шарнір якого підвішений фізичний маятник, на зовнішній осі карданового підвісу встановлений датчик кута тангажа, а на його внутрішній осі встановлений датчик кута крену, згідно корисної моделі, на осі карданового підвісу встановлені статично урівноважені триланкові сателітні механізми з датчиками кута на сателітах, а прилад додатково містить обчислювач для визначення кутів θ (тангажа) і φ (крену) рухомого об'єкту у відповідності з алгоритмами θ = k21 + 2 k23 4 , (19) UA (11) 56900 (13) де r1 - радіус датчиків кутів осей карданового підвісу; r2 - радіус датчиків кутів сателітів. U де 1 - показники (в радіанах) датчика кута зовнішньої осі карданового підвісу; 2 - показники датчика кута сателіта зовнішньої осі карданового підвісу; 3 - показники датчика кута внутрішньої осі карданового підвісу; 4 - показники датчика кута сателіта внутрішньої осі карданового підвісу; k2 r1 r2 / r2 , 3 φ = k23 + 4, де 1 - покази (в радіанах) датчика кута зовнішньої осі карданового підвісу; 2 - покази датчика кута сателіта зовнішньої осі карданового підвісу; 3 - покази датчика кута внутрішньої осі карданового підвісу; 4 - покази датчика кута сателіта внутрішньої осі карданового підвісу; k2=(r1+r2)/r2, де r1 - радіус датчиків кутів осей карданового підвісу; r2 - радіус датчиків кутів сателітів. Суть корисної моделі пояснюється кінематичною схемою приладу, яка представлена на кресленні, де позначено: 1 - маятник, вісь підвісу якого жорстко кріпиться до осьового шарніра 2; 3, 10 - зовнішня вісь карданового підвісу, жорстко зв'язана з осьовим шарніром 2; 4, 16 - корпус рухомого об'єкта; 5 - скоба зі струмознімачами датчика кута 6 з резистивною поверхнею: датчик кута жорстко кріпиться до зовнішньої осі 3; 7 - скоба, яка жорстко кріпиться до осьового шарніра 2, до датчика кута і до струмознімача датчика кута 8; 9 - внутрішня вісь карданового підвісу маятника; 11 - водило зі струмознімачем, жорстко зв'язані з внутрішньою віссю 10 карданового підвісу; 12 - вісь обертання сателітного колеса 13, що має осьовий шарнір і жорстко зв'язана із скобою 11; вісь обертання 12 паралельна до зовнішньої осі 3, 10; 13 - сателітний датчик кута; 14 - осьовий шарнір; 15 - зубчастий сектор, вісь обертання якого збігається з віссю 10, жорстко зв'язаною з корпусом основи 16; 17 - струмознімач датчика сателіта з водилом, яке жорстко кріпиться до осі 9 і до якої кріпиться вісь обертання сателітного колеса; вісь обертання сателіта паралельна до осі 9; 18 - втулка з внутрішньою віссю і осьовим підшипником сателітного колеса, на зовнішній поверхні якого знаходиться резистивний шар датчика кута сателіта; 19 - вісь обертання сателіта; 56900 4 20 - скоба, яка жорстко кріпиться до осі обертання сателіта; 21 - зубчастий сектор, який зчіплюється з сателітом 18, при цьому вісь обертання сектора зв'язана зі скобою 22; 22, 23 - балансири, статично врівноважують маси сателітів щодо осей карданового підвісу. Обертання коліс сателітів і секторів відбувається без прослизання за рахунок зубчастого зчеплення останніх, фрикційних передач та ін. Поставлене завдання з визначення кутів тангажа і крену об'єкта вирішується наступним чином. При повороті об'єкта на кут тангажа навколо осі ОХ2 проти годинникової стрілки датчика кута 6 вимірюють кут (1) 1= θ - 1 де 1 - кут відхилення осі маятника відносно вертикалі (вектор q) проти годинникової стрілки, а датчик кута сателіта 13 вимірює кут 2 = - r1/r2+ 1 (r1+r2)/r2, (2) Дозволяючи рівняння (1), (2) щодо 1, θ, отримаємо 1 1k1 2 , (3) 1 1k2 2 де k1 - r1/r2; k2=(r1+r2)/r2. При повороті об'єкта проти годинникової стрілки навколо поздовжньої осі ОХ1 на кут крену φ1 датчик кута 8 вимірює кут 3, який дорівнює (4) 3 = φ - 2 де 2 - кут відхилення маятника відносно вертикалі Землі, у площині, ортогональній площині відліку кута 1, а датчик кута сателіта вимірює кут 4 4 k1 k22 (5) Розв'язуючи рівняння (4), (5) відносно кутів 2, φ, отримаємо 2 k13 4 , (6) k23 4 . Елементи приладу по позиціях 1115 і по позиціях 1721 утворюють триланкові сателітні механізми, а елементи приладу по позиціях 23 і 9 утворюють внутрішній кардановий підвіс. Юстирування (установка) нулів датчиків по позиціях 5, 6, 7, 8, 11, 13, 17 і 18 проводиться, як і всіх маятникових приладів, на нерухомій горизонтальній відносно поверхні Землі основі. 5 Комп’ютерна верстка Л.Литвиненко 56900 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPendulum device for determination of angles of pitch and heel of movable object (two-coordinate karpachovs pendulum)
Автори англійськоюKarpachov Yurii Andriiovych, Husev Aleksii Volodymyrovych, Rudyk Yurii Mykytovych
Назва патенту російськоюМаятниковый прибор определения углов тангажа и kpeha подвижного объекта (двухкоординатный маятник карпачева)
Автори російськоюКарпачов Юрий Андреевич, Гусев Алексей Владимирович, Рудик Юрий Никитович
МПК / Мітки
МПК: G01B 7/00
Мітки: маятниковий, кутів, тангажа, прилад, маятник, крену, двокоординатний, об'єкта, визначення, рухомого, карпачева
Код посилання
<a href="https://ua.patents.su/3-56900-mayatnikovijj-prilad-viznachennya-kutiv-tangazha-i-krenu-rukhomogo-obehkta-dvokoordinatnijj-mayatnik-karpacheva.html" target="_blank" rel="follow" title="База патентів України">Маятниковий прилад визначення кутів тангажа і крену рухомого об’єкта (двокоординатний маятник карпачева)</a>
Маятниковий прилад для визначення вертикалі землі та кутів тангажу і крену на рухомому об’єкті (маятник карпачева)

Номер патенту: 56722
Опубліковано: 25.01.2011
Автор: Карпачев Юрій Андрійович
МПК: G01B 7/00
Мітки: об'єкти, маятник, визначення, рухомому, крену, вертикалі, землі, прилад, тангажу, кутів, маятниковий, карпачева
Формула / Реферат:
1. Маятниковий прилад для визначення вертикалі Землі та кутів тангажу і крену на рухомому об'єкті, який містить однокоординатний фізичний маятник, механічно з'єднаний з датчиком кута, датчиком моменту, демпфером механічних коливань та посилювачем зворотного зв'язку, причому датчик кута маятника жорстко з'єднаний з основою рухомого об'єкта, який відрізняється тим, що він додатково містить триланковий сателітний механізм, в якому вісь...
Двокоординатний датчик кутів нахилу

Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Мрачковський Олег Дмитрович, Худяков Борис Сергійович
МПК: G01C 9/00
Мітки: двокоординатний, нахилу, датчик, кутів
Формула / Реферат:
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних...
Пристрій для визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин
Номер патенту: 40039
Опубліковано: 25.03.2009
Автори: Куценок Яків Борисович, Гайко Оксана Георгіївна, Вовченко Ганна Яківна
МПК: A61B 8/00
Мітки: визначення, фронтально, ультразвукового, площин, сагітальної, датчика, апарата, кутів, нахилу, пристрій
Формула / Реферат:
Пристрій для визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин, який має вертикальну мітку на боковій грані датчика та фіксований на верхній його грані напрямляч для нитки з вантажем на кінцях, при цьому нитка проходить на рівні мітки, який відрізняється тим, що додатково на задній грані датчика виконана вертикальна мітка, на рівні якої закріплена нитка з вантажем, до того ж на боковій та задній...
Спосіб визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин

Номер патенту: 40040
Опубліковано: 25.03.2009
Автори: Вовченко Ганна Яківна, Гайко Оксана Георгіївна, Куценок Яків Борисович
МПК: A61B 8/00
Мітки: нахилу, ультразвукового, сагітальної, апарата, визначення, спосіб, фронтально, площин, кутів, датчика
Формула / Реферат:
Спосіб визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин, який включає нанесення вертикальної мітки на бокову грань датчика, фіксацію нитки з вантажем на верхній його грані на рівні мітки, розташування та переміщення датчика на шкірі обстежуваної ділянки, який відрізняється тим, що додатково на задню грань датчика наносять вертикальну мітку і на її рівні закріплюють нитку з вантажем, на бокову та...
Спосіб визначення кутів зсуву між фазами в трифазній системі електричних величин
Номер патенту: 35179
Опубліковано: 15.03.2001
Автори: Ходос Олександр Петрович, Дзюбко Мирослав Петрович, Сподін Андрій Іванович, Резніченко Тимофій Пилипович
МПК: H02H 3/38
Мітки: трифазній, спосіб, визначення, зсуву, фазами, системі, величин, кутів, електричних
Формула / Реферат:
Спосіб визначення кутів зсуву між фазами в трифазній системі електричних величин, при якому кути зсуву між фазами відраховуються відносно вектора фази А, який відрізняється тим, що кути зсуву jAB та jAC обчислюють за формулами:де АA, AB, АC - амплітудні значення величини відповідно в...
Попередній патент: Спосіб виробництва оцту спиртового харчового натурального
Наступний патент: Пристрій супроводження цілей
Випадковий патент: Рекомбінантний вірус мvа