Спосіб автоматичної стабілізації режиму прокатки
Формула / Реферат
Спосіб автоматичної стабілізації режиму прокатки, що включає використання як критерію стану прокату в міжклітьовому проміжку величини прогину прокату для регулювання швидкостей приводів суміжних клітей, який відрізняється тим, що попередньо визначають і запам'ятовують положення осі прокатки, задають максимальну величину прогину прокату щодо осі прокатки і період виміру максимальної величини прогину, а регулювання частоти обертання приводів суміжних клітей здійснюють таким чином, щоб поточна величина прогину не перевищувала його заданої максимальної величини.
Текст
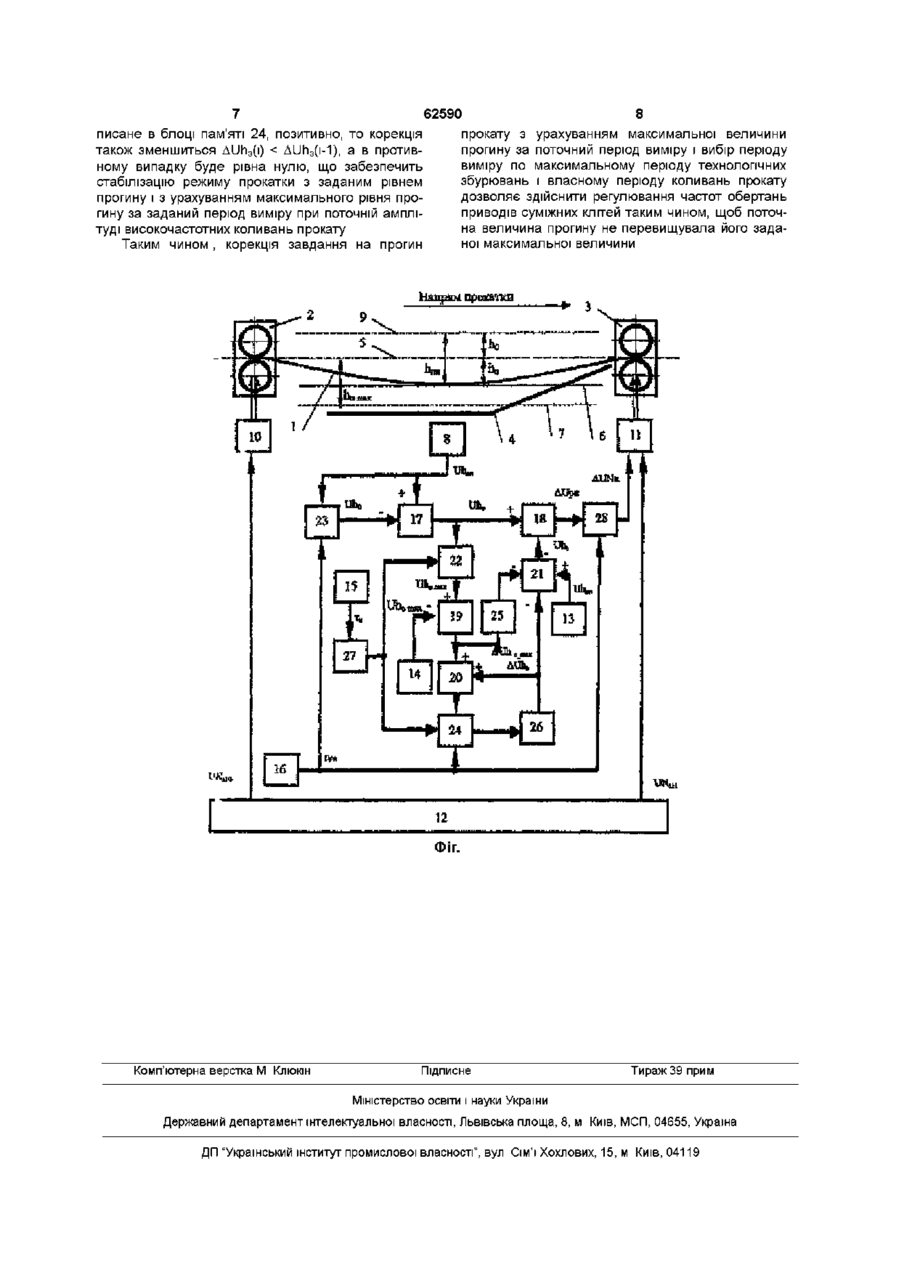
Спосіб автоматичної стабілізації режиму прокатки, що включає використання як критерію стану прокату в міжклітьовому проміжку величини прогину прокату для регулювання швидкостей приводів суміжних клітей, який відрізняється тим, що попередньо визначають і запам'ятовують положення осі прокатки, задають максимальну величину прогину прокату щодо осі прокатки і період виміру максимальної величини прогину, а регулювання частоти обертання приводів суміжних клітей здійснюють таким чином, щоб поточна величина прогину не перевищувала його заданої максимальної величини Винахід відноситься до прокатного виробництва, зокрема до способу стабілізації режиму безперервної прокатки, і може бути використаний для управління швидкісним режимом прокатки на безперервних дрібносортних станах Відомий спосіб стабілізації режиму прокатки, реалізований пристроєм (ас СССР №1094634 «Устройство для регулирования натяжения проката», авторы Е С Быков, Ю П Карпинский О Н Кукушкин, В И Лошкарев, В А Чигринский В И Стахно, А П Егоров, ВН Куваев, 1984г Бюл №20), що полягає у вимірі відстані від нульового рівня вимірника положення прокату до осі прокатки, установки заданої величини протану прокату між клітьми і стабілізації протану прокату на заданому рівні регулюванням швидкостей приводів суміжних клітей Недоліком даного способу є неможливість стабілізації режиму прокатки при великих амплітудах коливань прокату, викликаних, наприклад, биттям (ексцентриситетом) валків або, при великій згинаючій жорсткості прокату, утратою ним сталості під дією стискальних зусиль, необхідних для утворення заданої величини прогину Найбільш близьким по технічній сутності є спосіб автоматичної стабілізації режиму прокатки на безперервних станах, в якому використовується стан металу, що прокатується, у МІЖКЛІТЬОВОМ проміжку для регулювання швидкості приводів суміжних клітей, в якому як критерій стану розкату в МІЖКЛІТЬОВОМ проміжку використовують одночасно чи порізно значення величини прогину і частоти коливання розкату, виміряні по двох окремих канапах від того самого датчика положення металу шляхом виділення низькочастотної і високочастотної складових сигналу цього датчика, а уставками стабілізуючих величин протану і частоти коливань служать запам'ятовані значення тих величин, що мали місце під час ручного настроювання стану в момент переключення на режим автоматичної стабілізації прокатки (а с СССР №256840 «Способ автоматической стабилизации режима прокатки на непрерывних станах» В В Гетманец, С Д Гринберг, О Н Кукушкин , 1969г, Бюл №35) Недоліком даного способу є те, що він не може бути застосований, коли високочастотна складова коливань прокату в міжклітьовому проміжку накликана різними причинами, як то, його власними вільними коливаннями, биттям валків, затиранням розкату в проводці і т і , а и амплітуда порівнянна чи перевищує амплітуду низькочастотної складової, тобто коли відсутній однозначний зв'язок між частотою коливань прокату і поточною величиною прогину прокату з рівнем МІЖКЛІТЬОВИХ зусиль у ньому Крім того, він не може бути застосований на сучасних дрібносортних станах, де через конструктивні особливості прокатного стану оператор не може візуально оцінити стан прокату для переходу від режиму ручного настроювання в режим автоматичної стабілізації прокатки О ю (О 62590 ртання приводами 10 і 11 ВІДПОВІДНО з частотою обертання, що задається задатчиком частоти обертання приводів 12 Перед початком прокатки величини завдань частот обертань приводів 10, 11 UN3io і UN3n встановлюються оператором з такою неузгодженістю, щоб прокат 1 після захоплення його валками КЛІТІ 3 свідомо знаходився на осі прокатки 4 Тоді ж оператор задає робочу величину прогину Uh3H прокату 1 щодо осі прокатки 5 - задатчиком прогину 13, максимально припустиму величину прогину прокату 1 щодо осі прокатки 5 Uh3max - задатчиком максимального рівня прогину 14, період виміру максимальної величини прогину - задатчиком 15, а задатчиком режиму стабілізації прогину 16 устаноПоставлена задача досягається тим, що в влює режим контролю положення осі прокатки 5 способі автоматичної стабілізації режиму прокат(DPn = "0") При цьому, період виміру максимальної ки, що використовує як критерій стану прокату в величини прогину вибирається таким чином, щоб міжклітьовому проміжку величину прогину прокату виконувалася нерівність х, £ тах{ГВ2, Твз, Т п і}, тобдля регулювання швидкостей приводів суміжних то період виміру був більше періоду обертання клітей, ВІДПОВІДНО до винаходу попередньо визнавалків клітей 2, 3 і періоду власних коливань прочають і запам'ятовують положення осі прокатки, кату, робоча величина прогину - виходячи з необзадашь максимальну величину прогину прокату хідного рівня МІЖКЛІТЬОВИХ зусиль у прокаті, макщодо осі прокатки і період виміру максимальної симально припустима величина прогину величини прогину, а регулювання частот обертань виходячи з положення дна передатного жолоба 4 приводів суміжних клітей роблять таким чином, щодо осі прокатки 5 щоб поточна величина прогину не перевищувала його заданої максимальної величини У процесі прокатки положення прокату 1 у веСукупність суттєвих ознак дозволяє одержати ртикальній площині контролюється датчиком протехнічний результат завдяки іншому визначенню гину 8 щодо своєї верхньої межі візування 9 У стабілізуючої величини, а саме стабілізації велипочатковий момент прокатки, коли задатчиком чини протану прокату щодо осі прокатки з обліком режиму стабілізації прогину 16 встановлено у рейого максимальної величини, обмірюваної за зажим контролю положення осі прокатки, поточний даний період часу Характерною рисою даного рівень прогину 6 збігається з положенням осі проспособу є те, що при визначені стабілізуючої векатки 5 ( h m - ho),і сигнал Uh m пропорційний відличини враховується максимальна величина простані від верхньої межі візування 9 датчика прогигину, обмірюваного за заданий період, і дозволяє ну 8 до поточного рівня прогину 6, відповідає забезпечити мінімальні МІЖКЛІТЬОВІ зусилля в проположенню осі прокатки 5 у полі зору датчика прокаті, які обмежені конструктивними особливостями гину 8 щодо його верхньої межі візування 9 (Uh m передаточних жолобів, незалежно від амплітуди і Uho) частоти високочастотних коливань прокату, а раСигнал Uh m надходить на підсумовуючий вхід зом з попереднім визначенням і запам'ятовуванблоку порівняння 17 і на вхід даних першого блоку ням положення осі прокатки дозволяють здійснюпам'яті 23, і сигналом режиму контролю положення вати як перехід у режим стабілізації, так і сам осі прокатки DPn = "0", що надходить від задатчика процес автоматичної стабілізації процесу прокатки режиму стабілізації прогину 16 на керуючий вхід в умовах відсутності візуального контролю прокату першого блоку пам'яті 23, з'являється в останній оператором На виході блоку пам'яті 23 Уявляється сигнал Uho, що відповідає положенню осі прокатки 5, що надНа фіг приведена одна з можливих схем здійходить на від'ємний ВХІД блоку порівняння 17 Таснення запропонованого способу ким чином, у режимі контролю положення осі проНа фіг, представлені 1 - прокат, 2, 3 - прокатні катки на підсумовуючому і від'ємному входах КЛІТІ, 4 - передатний жолоб, 5 - вісь прокатки 6 блоку порівняння 17 присутні рівні сигнали (Uh m поточний рівень прогину прокату 1,7- максимальUh0) і сигнал на його виході буде дорівнювати нуно припустимий рівень прогину прокату 1,8- датлю (Uhn = 0) чик прогину прокату 1,9- верхня границя візування датчика протану 8, 10, 11 - привода клітей 2 і З Сигнал з виходу блоку порівняння 17 надхоВІДПОВІДНО, 12 - задатчик частоти обертання придить на вхід вибірки даних опоку вибірки максимаводів 10, 11 клітей 2, 3, 13 - задатчик прогину прольного протну 22, тому на виході блоку вибірки кату 1, 14 - задатчик максимально припустимого даних 22 буде присутній нульовий сигнал (Uhnmax рівня прогину 7 прокату 1, 15 - задатчик період 0) Якщо сигнал на виході блоку порівняння 19 виміру максимальної величини прогину прокату 1, дорівнює різниці сигналів на його входах, розділь16 - задатчик режиму стабілізації прогину прокату но підключених до виходів блоку вибірки 22 і зада1, 17, 18, 19, 20, 21 - суматори, 22 - блок вибірки тчика максимальної величини прогину 14, то на максимального прогину прокату 1, 23, 24 - блоки виході блоку порівняння 19 у режимі контролю пам'яті, 25, 26 - детектори, 27 - керований генераположення осі прокатки буде негативний сигнал тор одиничних імпульсів, 28 - регулятор прогину В основу винаходу поставлена задача удосконалення способу автоматичної стабілізації режиму прокатки, що забезпечує стабілізацію режиму прокатки при коливаннях прокату в міжклітьовому проміжку шляхом регулювання швидкостей приводів суміжних клітей з урахуванням максимальної величини прогину прокату щодо осі прокатки за заданий період виміру, у результаті чого мінімізується вплив на процес стабілізації режиму прокатки факторів , що викликають коливання прокату, а перехід у режим автоматичної стабілізації режиму прокатки може бути здійснений без безпосереднього візуального контролю прокату в міжклітьовому проміжку оператором Спосіб реалізується таким чином Прокат 1 прокатується в клітях 2 і 3, що приводяться в обе Проходження негативного сигналу з виходу блоку порівняння 19 на перший від'ємний вхід опо ку порівняння 21 блокується детектором 25, і на цьому вході блоку порівняння 21 буде присутній нульовий сигнал Одночасно негативний сигнал з виходу блоку порівняння 19 надходить на підсумовуючий вхід блоку порівняння 20 У режимі контролю положення осі прокатки сигнал Dpn = "0", що надходить від задатчиком режиму с стабілізації прогину 16 на вхід скидання блоку пам'яті 24, скидає вміст останнього в нуль, і на виході детектора 26 режимі контролю положення осі прокатки буде нульовий сигнал Таким чином , на усіх від'ємних входах блоку порівняння 21 у режимі контролю положення осі прокатки будуть присутні нульові сигнали Оскільки підсумовуючий вхід блоку порівняння 21 підключений до виходу задатчика прогину 13, то на його виході буде присутній сигнал завдання робочої величини прогину прокату 1 щодо осі прокатки 5 (Uh3 = Uh3H), який, надходячи на від'ємний вхід блоку порівняння 18 віднімається з нульового сигналу (Uhn = 0) контролю, що надходить у режимі контролю положення осі прокатки з виходу блоку порівняння 17 Від'ємний сигнал ДІІрп = -Uh3 = -Uh3H з виходу блоку порівняння 18 надходить на вхід регулятора прогину 28, однак сигнал Dpn = "0", надходячи від задатчика режиму стабілізації прогину 16 на керуючий вхід регулятора прогину 28, блокує його, сигнал на виході регулятора прогину 28 дорівнює нулю (ДШЧк = 0), частота обертання приводу 11 КЛІТІ З не змінюється, і прокат 1 залишається в натягнутому стані на осі прокатки 4 Після ТОГО, ЯК задатчик режиму стабілізації прогину 16 буде переведений у режим автоматичної стабілізації режиму прокатки (D pn = "1") перший блок пам'яті 23 переходить у режим збереження даних, і на його виході в режимі стабілізації прогину (Dpn = "1") буде постійно присутній сигнал Uho, який відповідає положенню осі прокатки 5, записаний у ньому в режимі контролю положення осі прокатки, що забезпечує, ВІДПОВІДНО ДО винаходу, попереднє визначення і запам'ятовування положення осі прокатки Сигнал Dpn = " 1 " , надходячи з виходу задатчика режиму стабілізації прогину 16 на керуючий вхід регулятора прогину 28, розблокує його, а так ж на його вході присутній негативний сигнал Ди р п Uh3max) Тоді на виході блоку порівняння 19 з'явиться позитивний сигнал AUhnmax, що відразу надійде через детектор 25 на перший від'ємний вхід блоку порівняння 21 і зменшить завдання прогину на виході блоку порівняння 21 на цю величину (Uh3 = Uh3H Uhnmax), ЩО, У С О Чергу, ВИКЛИЧЄ ЧЄрЄЗ бЛОК ПОВЮ РІВНЯННЯ 18 і регулятор прогину 28 таке регулювання частоти обертання приводу 11 КЛІТІ, щоб поточна величина прогину не перевищувала його заданої максимальної величини Після завершення заданого задатчиком 15 поточного періоду виміру і, максимальної величини прогину прокату 1, одиничний імпульс генератора 27 запише в блок пам'яті 24 суму сигналів UUhnmax і UUh3, тобто при UUhnmax £ 0 і Uh 3m £ 0 - максимальну, у поточному періоді виміру, величину корекції встановленого оператором завдання прогину Одночасно цей же імпульс скидає вихід блоку вибірки 22 у нуль Тому в початковий момент наступного періоду виміру максимальної величини прогину на виході блоку порівняння 21 зберігається завдання на прогин, сформоване в попередньому періоді виміру з обліком фактичної максимальної величини прогину Якщо в поточному періоді виміру максимальний рівень прогину 7, заданий задатчиком 14, знову буде перевищений, то завдання прогину Uh3 знову буде зменшено на величину, що забезпечує таку стабілізацію процесу прокатки щоб поточна величина прогину не перевищувала його заданої максимальної величини Якщо, внаслідок приробітку валків, зменшення технологічних збурювань і т і , амплітуда високочастотних коливань прогину зменшиться так, що НапрИКІНЦІ ПОТОЧНОГО, 1-ГО П е р і о д у ВИМіріВ Uhnmax(l) = < Uh 3max , то корекція прогину прокату в цьому періоді виміру буде дорівнювати величині AUh3(i1), записаної наприкінці попереднього періоду виміру, а одиничний імпульс генератора 16 запише в блок пам'яті 24 нове, зменшене значення рівне AUh3(i-1) + (Uhnmax(i) - Uh3max) Якщо значення, за 62590 писане в блоці пам'яті 24, позитивно, то корекція також зменшиться ДІ)п3(і) < AUh3(i-1), а в противному випадку буде рівна нулю, що забезпечить стабілізацію режиму прокатки з заданим рівнем прогину і з урахуванням максимального рівня прогину за заданий період виміру при поточній амплітуді високочастотних коливань прокату Таким чином , корекція завдання на прогин 8 прокату з урахуванням максимальної величини прогину за поточний період виміру і вибір періоду виміру по максимальному періоду технологічних збурювань і власному періоду коливань прокату дозволяє здійснити регулювання частот обертань приводів суміжних клітей таким чином, щоб поточна величина прогину не перевищувала його заданої максимальної величини кв U J+ І? 25 12 Фіг. Комп'ютерна верстка М Клюкш Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic stabilization of rolling mode
Автори англійськоюBabenko Mykhailo Antonovych, Kekukh Anatolii Volodymyrovych, Sheremet Volodymyr Oleksandrovych, Shchur Vitalii Andriiovych
Назва патенту російськоюСпособ автоматической стабилизации режима прокатки
Автори російськоюБабенко Михаил Антонович, Кэкух Анатолий Владимирович, Шеремет Владимир Александрович, Щур Виталий Андреевич
МПК / Мітки
МПК: B21B 1/00
Мітки: автоматичної, режиму, прокатки, спосіб, стабілізації
Код посилання
<a href="https://ua.patents.su/4-62590-sposib-avtomatichno-stabilizaci-rezhimu-prokatki.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичної стабілізації режиму прокатки</a>
Пристрій автоматичної стабілізації механізмів, що рухаються
Номер патенту: 5853
Опубліковано: 29.12.1994
Автори: Козачок Борис Дмитрович, Бадовський Василь Степанович, Булін Мирон Васильович, Волобой Володимир Іванович
МПК: A01G 25/00, A01G 25/02, G01C 9/00
Мітки: стабілізації, пристрій, автоматичної, рухаються, механізмів
Формула / Реферат:
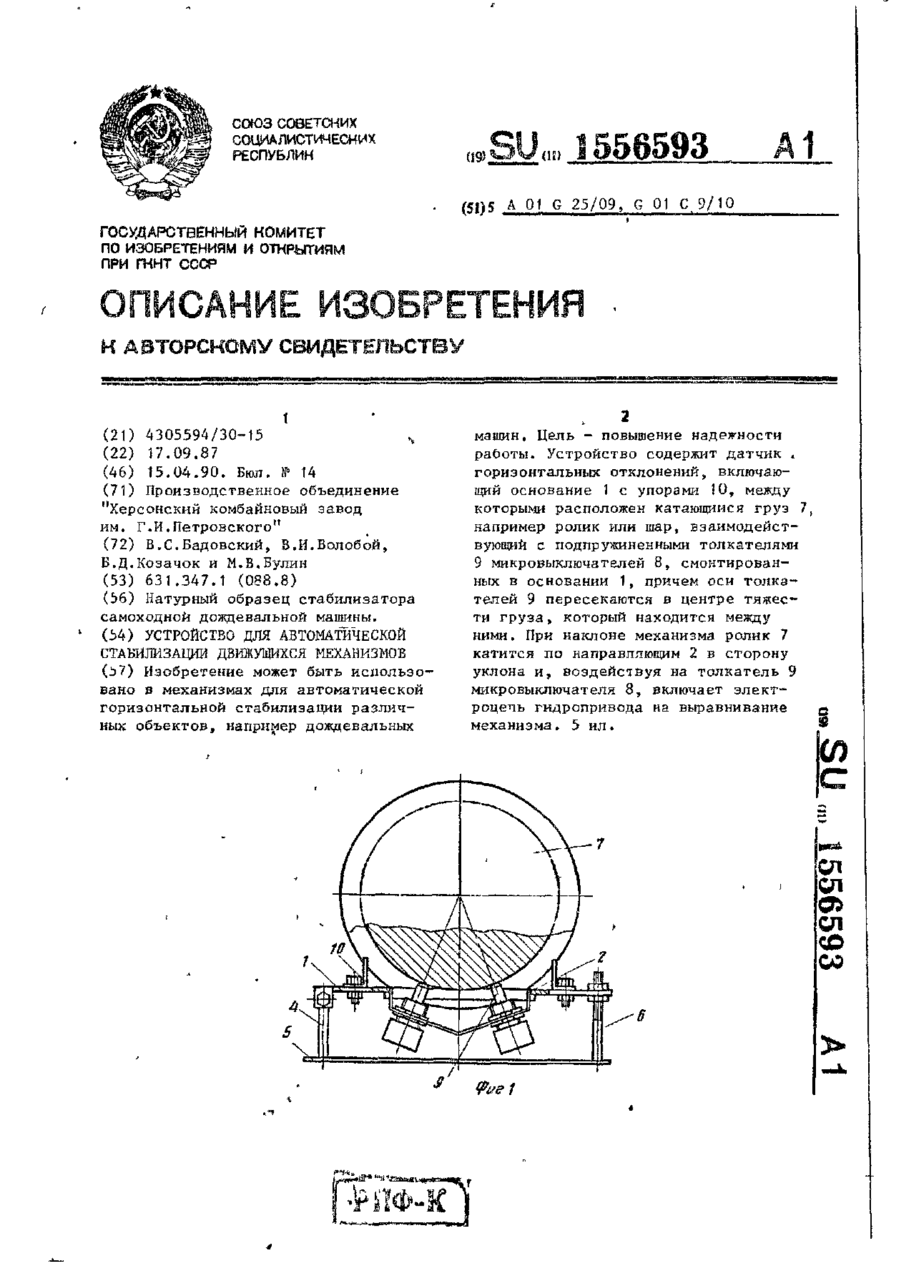
Устройство для автоматической стабилизации движущихся механизмов, включающее основание с упорами и расположенный между ними катающийся груз, взаимодействующий с контактами, отличающееся тем, что, с целью повышения надежности работы, контакты выполнены в виде микровыключателей с подпружиненными толкателями, которые смонтированы в основании под углом к нему, обеспечивающим пересечение осей толкателей в центре тяжести груза.
Спосіб регулювання режиму роботи енергооб’єднання
Номер патенту: 50434
Опубліковано: 15.10.2002
Автори: Кацадзе Теймураз Луарсабович, Сулейманов Віктор Миколайович, Баженов Володимир Андрійович
МПК: H02J 3/24
Мітки: регулювання, енергооб'єднання, роботи, спосіб, режиму
Формула / Реферат:
Спосіб регулювання режиму роботи енергооб'єднання, який включає вимірювання величини напруги в контрольованих вузлах електричної мережі, струмів в перерізах, який відрізняється тим, що додатково вимірюють значення частоти в системі, визначають чутливість параметрів режиму роботи системи до зміни вузлових потужностей, формують сигнал, пропорційний до економічного збитку від відхилення величини частоти від номінальної величини, сумують його з...
Спосіб безперервної прокатки дроту
Номер патенту: 60840
Опубліковано: 15.10.2003
Автори: Кравець Михайло Леонідович, Петров Володимир Володимирович, Сергєєв Віктор Володимирович, Ковалевський Андрій Олегович, Правдін Юрій Михайлович, Лобанов Олександр Іванович, Бестужева Надія Михайлівна, Крижановський Віталій Анатолійович
МПК: B21B 1/16
Мітки: спосіб, безперервної, прокатки, дроту
Формула / Реферат:
Спосіб безперервної прокатки дроту, що включає багаторазову холодну деформацію круглої заготовки в клітях із тривалковими калібрами при зниженні ступеня деформації металу дроту по ходу прокатки, який відрізняється тим, що дріт у процесі деформації піддають натягу між клітями, величину якого по ходу прокатки зменшують в інтервалі від 7 до 1% пропорційно зниженню величини деформації дроту в калібрі кожної кліті.
Спосіб регулювання натягу штаби в процесі прокатки між клітями багатоклітьового стана з пічними моталками
Номер патенту: 59700
Опубліковано: 15.09.2003
Автори: Барабаш Андрій Володимирович, Остапенко Арнольд Леонтійович, Каушанський Ігор Борисович, Білобров Юрій Миколайович, Стеч Володимир Станіславович, Леонідов-Каневський Євген Володимирович, Гагарін Павел Павлович
МПК: B21B 37/48
Мітки: штаби, клітями, прокатки, натягу, стана, спосіб, процесі, багатоклітьового, пічними, регулювання, моталками
Формула / Реферат:
1. Спосіб регулювання натягу смуги в процесі прокатки між клітями багатоклітьового стана з пічними моталками, що включає зміну частоти обертання ведених клітей по відхиленню міжклітьових натягів, який відрізняється тим, що обчислюють потужність прокатки кожної кліті, з цієї потужності виділяють потужність прокатки без натягу, а потім і потужність, обумовлену натягами, яку використовують для визначення величини натягів, при цьому міжклітьові...
Спосіб регулювання режиму теплового агрегату
Номер патенту: 52695
Опубліковано: 15.01.2003
Автори: Дудін Ігор Леонідович, Трубеко Олександр Володимирович, Чуйко Віктор Андрійович
МПК: F23N 1/00
Мітки: теплового, регулювання, режиму, спосіб, агрегату
Формула / Реферат:
Спосіб регулювання режиму теплового агрегату, наприклад тунельної печі, устаткованого газовими пальниками для випалу вогнетривких виробів, шляхом зміни витрати газу пальниками, який відрізняється тим, що зміну здійснюють шляхом чергування імпульсів номінальної і зниженої витрати газу, причому величину зниженої витрати встановлюють в межах 0,1-0,2 номінальної витрати газу, і тривалістю імпульсу 0,2-0,3 постійної часу нагрівання теплового...
Попередній патент: Спосіб ведення доменної плавки
Наступний патент: Електродна стрічка для наплавлення
Випадковий патент: Пристрій для анігіляції вітру