Спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою
Номер патенту: 63953
Опубліковано: 25.10.2011

Формула / Реферат
Спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою, який полягає в вимірюванні вертикального переміщення вантажоприймальної платформи відносно рівня дорожнього полотна, причому величину вертикального переміщення вимірюють в ![]() станах завантаженості транспортного засобу, де
станах завантаженості транспортного засобу, де ![]() , і додатково вимірюють вертикальне переміщення при положенні еталонного вантажу заданої маси в цих же
, і додатково вимірюють вертикальне переміщення при положенні еталонного вантажу заданої маси в цих же ![]() станах завантаженості, а масу вантажу
станах завантаженості, а масу вантажу ![]() визначають по формулі:
визначають по формулі:
![]()
де ![]() - маса еталонного вантажу;
- маса еталонного вантажу; ![]() - кількість станів завантаженості транспортного засобу, в яких вимірюють вертикальне переміщення;
- кількість станів завантаженості транспортного засобу, в яких вимірюють вертикальне переміщення; ![]() - середнє вертикальне переміщення вантажоприймальної платформи при накладанні еталонного вантажу в і-тій і (і-1) станах завантаженості:
- середнє вертикальне переміщення вантажоприймальної платформи при накладанні еталонного вантажу в і-тій і (і-1) станах завантаженості:
![]()
де ![]() - середнє вертикальне переміщення вантажоприймальної платформи при завантаженні еталонним вантажем при і-тому стані завантаження;
- середнє вертикальне переміщення вантажоприймальної платформи при завантаженні еталонним вантажем при і-тому стані завантаження; ![]() - максимальна величина вертикального переміщення вантажоприймальної платформи при максимальному завантажені:
- максимальна величина вертикального переміщення вантажоприймальної платформи при максимальному завантажені:
![]()
де ![]() - відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть завантажений колісний транспортний засіб;
- відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть завантажений колісний транспортний засіб; ![]() - відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть розвантажений колісний транспортний засіб;
- відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть розвантажений колісний транспортний засіб; ![]() - різниця відстані від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть колісний транспортний засіб між і-тим і (і-1) станах завантаженості (в подальшому позначається як
- різниця відстані від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть колісний транспортний засіб між і-тим і (і-1) станах завантаженості (в подальшому позначається як ![]() ):
):
![]()
![]() - абсолютна похибка визначення маси
- абсолютна похибка визначення маси ![]() вантажу, а також додатково визначають відносну похибку визначення маси
вантажу, а також додатково визначають відносну похибку визначення маси ![]() вантажу по формулі:
вантажу по формулі:
![]()
де ![]() - середні відносні похибки вимірювання
- середні відносні похибки вимірювання ![]() відповідно, а масу
відповідно, а масу ![]() еталонного вантажу визначають по формулі:
еталонного вантажу визначають по формулі:
де ![]() - вантажоприймальність транспортного засобу;
- вантажоприймальність транспортного засобу; ![]() - задана відносна похибка визначення маси
- задана відносна похибка визначення маси ![]() вантажу, яка відрізняється тим, що для визначення маси вантажу вимірюють відстані від встановлених чотирьох і більше точок вантажоприймальної платформи, до поверхні полотна, на якій стоїть колісний транспортний засіб до і після встановлення вантажу, значення маси вантажу
вантажу, яка відрізняється тим, що для визначення маси вантажу вимірюють відстані від встановлених чотирьох і більше точок вантажоприймальної платформи, до поверхні полотна, на якій стоїть колісний транспортний засіб до і після встановлення вантажу, значення маси вантажу ![]() визначають за зміною виміряної відстані
визначають за зміною виміряної відстані ![]() і визначеної для кожного виду колісного транспортного засобу залежності
і визначеної для кожного виду колісного транспортного засобу залежності ![]() , де
, де ![]() - функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу
- функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу ![]() .
.
Текст
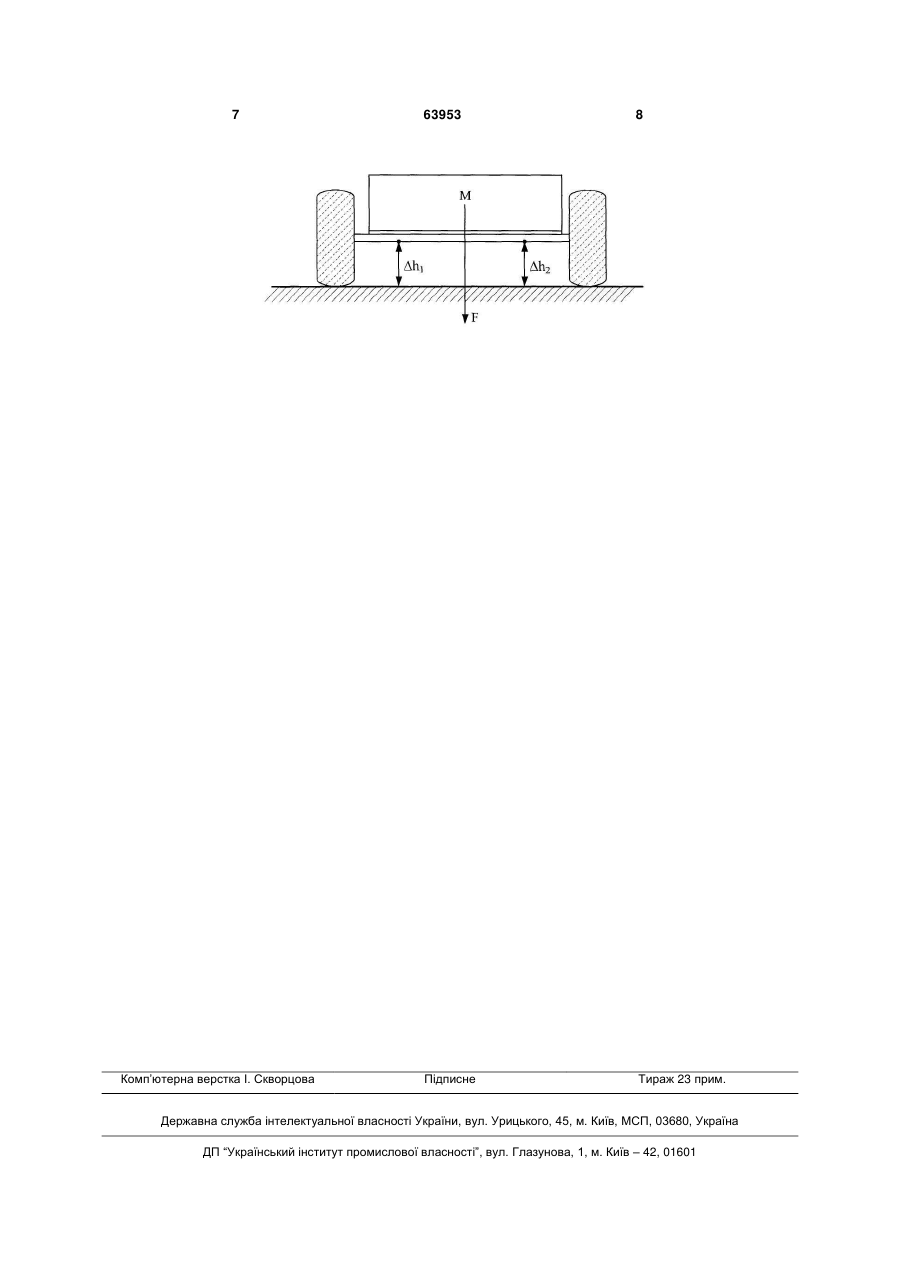
УКРАЇНА (19) UA (11) 63953 (13) U (51) МПК G01G 19/08 (2006.01) ДЕРЖАВНА СЛУЖБА ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ УКРАЇНИ видається під відповідальність власника патенту ОПИС ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (54) СПОСІБ ВИЗНАЧЕННЯ МАСИ ВАНТАЖУ В КОЛІСНОМУ ТРАНСПОРТНОМУ ЗАСОБІ З РУХОМОЮ ПІДВІСКОЮ 1 де m - маса еталонного вантажу; n - кількість станів завантаженості транспортного засобу, в яких вимірюють вертикальне переміщення; di середнє вертикальне переміщення вантажоприймальної платформи при накладанні еталонного вантажу в і-тій і (і-1) станах завантаженості: ( i 1 ) di i , 2 де i - середнє вертикальне переміщення вантажоприймальної платформи при завантаженні еталонним вантажем при і-тому стані завантаження; I - максимальна величина вертикального переміщення вантажоприймальної платформи при максимальному завантажені: I Iз Iп , де Iз - відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть ня Ii, m, di відповідно, а масу m еталонного вантажу визначають по формулі: M* d m 2 2 2 2 , U де m , I, d - середні відносні похибки вимірюван (13) i 1 2 2 M 1 2 m l 2 d , M d n M* ( I m ) де м * - вантажоприймальність транспортного засобу; М* - задана відносна похибка визначення маси M вантажу, який відрізняється тим, що для визначення маси вантажу вимірюють відстані від встановлених чотирьох і більше точок вантажоприймальної платформи, до поверхні полотна, на якій стоїть колісний транспортний засіб до і після встановлення вантажу, значення маси вантажу M визначають за зміною виміряної відстані I і визначеної для кожного виду колісного транспортного засобу залежності M f (I,M) , де f (I,M) функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу M . 63953 M (11) M m Ii M, di M - абсолютна похибка визначення маси M вантажу, а також додатково визначають відносну похибку визначення маси M вантажу по формулі: UA n завантажений колісний транспортний засіб; Iп відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть розвантажений колісний транспортний засіб; Ii - різниця відстані від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть колісний транспортний засіб між і-тим і (і-1) станах завантаженості (в подальшому позначається як I ): I (Ii Ii 1), (19) (21) u201103787 (22) 29.03.2011 (24) 25.10.2011 (46) 25.10.2011, Бюл.№ 20, 2011 р. (72) БАБІЙ СЕРГІЙ МИКОЛАЙОВИЧ, ФОЛЮШНЯК ОЛЕНА ДМИТРІВНА (73) ВІННИЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (57) Спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою, який полягає в вимірюванні вертикального переміщення вантажоприймальної платформи відносно рівня дорожнього полотна, причому величину вертикального переміщення вимірюють в n станах завантаженості транспортного засобу, де n 3 , і додатково вимірюють вертикальне переміщення при положенні еталонного вантажу заданої маси в цих же n станах завантаженості, а масу вантажу M визначають по формулі: 2 3 Корисна модель належить до транспортної індустрії. Відомий спосіб вимірювання ваги вантажу засобу [патент № 53005А, МПК G01G19/08, опубл. 29.01.2002], який полягає у тому, що визначають частотну характеристику, за якою складають математичну модель транспортного засобу, визначають частотну характеристику й температуру кожної шини транспортного засобу, а також значення атмосферного тиску до і після завантаження, і за результатами цих вимірювань по математичній моделі транспортного засобу визначають масу його вантажу. Недолік полягає в складності практичного застосування і низькій надійності експлуатації запропонованого способу. Найбільш близьким є спосіб визначення маси вантажу в транспортному засобі [патент РФ № 2110047, МПК G01G19/08, опубл. 27.04.1998], який полягає у вимірюванні маси вантажу в транспортному засобі, оснований на зміні вертикального переміщення вантажоприймальної платформи відносно рівня дорожнього полотна, причому величину вертикального переміщення вимірюють в n станах завантаженості транспортного засобу, де n3, і додатково вимірюють вертикальне переміщення при положенні еталонного вантажу заданої маси в цих же n станах завантаженості, а масу вантажу М визначають по формулі: n M m Ii i 1 di M, де m - маса еталонного вантажу; n - кількість станів завантаженості транспортного засобу, в яких вимірюють вертикальне переміщення; di середнє вертикальне переміщення вантажоприймальної платформи при накладанні еталонного вантажу в і-тій і (і-1) станах завантаженості: ( i 1 ) di i, 2 де i - середнє вертикальне переміщення вантажоприймальної платформи при завантаженні еталонним вантажем при і-тому стані завантаження; I - максимальна величина вертикального переміщення вантажоприймальної платформи при максимальному завантаженні: I Iз Iп , де Iз - відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть завантажений колісний транспортний засіб; Iп відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть розвантажений колісний транспортний засіб; Ii - різниця відстані від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть колісний транспортний засіб між і-тим і (і-1) станах завантаженості (в подальшому позначається як I ): I (Ii Ii 1), 63953 4 M - абсолютна похибка визначення маси М вантажу, а також додатково визначають відносну похибку визначення маси М вантажу по формулі: M 2 2 M 1 2 m l d , M d2 де m , I, d - середні відносні похибки вимірювання li, m, di відповідно, а масу m еталонного вантажу визначають по формулі M* d m 2 2 2 2 , n M * ( I m ) де м * - вантажоприймальність транспортного засобу; М* - задана відносна похибка визначення маси М вантажу. Недоліком цього способу є його не досить висока точність вимірювання. В основу корисної моделі поставлена задача створення способу визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою, в якому за рахунок вимірювання відстаней встановлених чотирьох точок вантажоприймальної платформи до поверхні полотна, на якій стоїть колісний транспортний засіб, визначають стани завантаженості колісного транспортного засобу з рухомою підвіскою. Поставлена задача вирішується тим, що спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою полягає в вимірюванні вертикального переміщення вантажоприймальної платформи відносно рівня дорожнього полотна, причому величину вертикального переміщення вимірюють в n станах завантаженості транспортного засобу, де n3, і додатково вимірюють вертикальне переміщення при положенні еталонного вантажу заданої маси в цих же n станах завантаженості, а масу вантажу М визначають по формулі: I M, i 1 di де m - маса еталонного вантажу; n - кількість станів завантаженості транспортного засобу, в яких вимірюють вертикальне переміщення; di n M m середнє вертикальне переміщення вантажоприймальної платформи при накладанні еталонного вантажу в і-тій і (і-1) станах завантаженості: ( i 1 ) di i , 2 де di - вертикальне переміщення вантажоприймальної платформи при завантаженні еталонним вантажем при і-тому стані завантаження; I максимальна величина вертикального переміщення вантажоприймальної платформи при максимальному завантаженні: I Iз Iп , де Iз - відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть 5 63953 завантажений колісний транспортний засіб; Iп відстань від точки вантажоприймальної платформи до поверхні полотна, на якому стоїть розвантажений колісний транспортний засіб; I - різниця відстані від відповідної точки вантажоприймальної платформи до поверхні полотна, на якому стоїть колісний транспортний засіб між і-тим і (і-1) станах завантаженості: I (Ii Ii 1), M - абсолютна похибка визначення маси М вантажу, а також додатково визначають відносну похибку визначення маси М вантажу по формулі: M 2 2 M 1 2 m l d , M d2 де m , I, d - середні відносні похибки вимірювання li, m, di відповідно, а масу m еталонного вантажу визначають по формулі: M* d m 2 2 2 2 , n M * ( I m ) де м * - вантажоприймальність транспортного засобу; М* - задана відносна похибка визначення маси М вантажу, причому додатково для визначення маси вантажу вимірюють відстані від встановлених чотирьох і більше точок вантажоприймальної платформи, до поверхні полотна, на якій стоїть колісний транспортний засіб до і після встановлення вантажу, значення маси вантажу М визначають за зміною виміряної відстані I і визначеної для кожного виду колісного транспортного засобу залежності M f (I,M) , де f (I,M) - функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу M . На кресленні наведено фронтальний переріз однієї колісної пари колісного транспортного засобу з встановленими відповідно двома точками на вантажоприймальній платформі. Від цих точок здійснюють вимірювання відстаней до поверхні полотна, на якій стоїть колісний транспортний засіб. Напрямок сили F показує силу, з якою діє вантаж масою М на площину дотику колісних шин з поверхнею полотна, на якій стоїть колісний транспортний засіб. Величина сили F, за рахунок зміни вантажу масою М, забезпечує різні стани завантаженості колісного транспортного засобу. На всій вантажоприймальній платформі колісного транспортного засобу встановлюють чотири відповідних точки, від яких здійснюють вимірювання відповідних відстаней до завантаження і після завантаження вантажу колісного транспортного засобу. По отриманих даних визначають різницю відстаней (I1, I2 , I3 , I4 , Im ) до встановлення вантажу і після встановлення вантажу в чотирьох відповідних точках вантажоприймальної платформи. Визначення значення маси вантажу М визначають за зміною виміряної відстані в відповідних 6 чотирьох і більше точках I1, I2 , I3 , I4 , Im і визначеної для кожного виду колісного транспортного засобу залежності М=f (I1, I2 , I3 , I4 , Im ) , M ), ( де f ( (I1, I2 , I3 , I4 , Im ) ), M ) - функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу M . Спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою виконується наступним чином. Для виконання визначення маси вантажу М в колісному транспортному засобі з рухомою підвіскою вимірюють вертикальне переміщення вантажоприймальної платформи відносно рівня дорожнього полотна, на якому стоїть колісний транспортний засіб, при і=1,2,3…n станах завантаженості транспортного засобу, до і після встановлення вимірюваного та еталонного вантажу. Вимірювання вертикального переміщення виконують в чотирьох і більше точках вантажоприймальної платформи (I1,I2 ,I3 ,I4 , Im ) . По отриманих даних для різних станів завантаженості визначають різницю відстаней (I1, I2 , I3 , I4 , Im ) до встановлення вантажу і після встановлення вантажу в чотирьох і більше відповідних точках вантажоприймальної платформи. Дії повторюються також для еталонного вантажу. Значення маси вантажу М визначають за зміною виміряної відстані I, для кожної з чотирьох і більше точок, і визначеної для кожного виду колісного транспортного засобу залежності M f (I,M) , де f (I,M) - функціональна залежність, виведена на основі закону Гука для конкретної марки транспортного засобу М'. Вертикальне переміщення вантажоприймальної платформи при стиснення ресорних пружин для відповідної марки колісного транспортного засобу під дією навантаження описується законом Гука: x x0 F , x0 K(M) x x0 x0 де - вертикальне переміщення вантажоприймальної платформи та x 0 - стан заванта ження, x - стан розвантаження вантажоприймальної платформи; K(M) - коефіцієнт пружності, який залежить від конкретної марки колісного транспортного засобу M ; F - сила з якою діє вантаж масою М на площину дотику колісних шин з поверхнею полотна, на якій стоїть колісний транспортний засіб: . F=M g, де g - прискорення вільного падіння (g=9,8 . 2 м с ). 7 Комп’ютерна верстка І. Скворцова 63953 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of cargo weight in a wheel transportation mean with movable suspension
Автори англійськоюBabii Serhii Mykolaiovych, Foliushniak Olena Dmytrivna
Назва патенту російськоюСпособ определения массы груза в колесном транспортном средстве с подвижной подвеской
Автори російськоюБабий Сергей Николаевич, Фолюшняк Елена Дмитриевна
МПК / Мітки
МПК: G01G 19/08
Мітки: спосіб, колісному, маси, визначення, транспортному, рухомою, підвіскою, засоби, вантажу
Код посилання
<a href="https://ua.patents.su/4-63953-sposib-viznachennya-masi-vantazhu-v-kolisnomu-transportnomu-zasobi-z-rukhomoyu-pidviskoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення маси вантажу в колісному транспортному засобі з рухомою підвіскою</a>
Спосіб розміщення і кріплення штабеля вантажу на транспортному засобі
Номер патенту: 76070
Опубліковано: 15.06.2006
Автор: Петрухін Володимир Миколайович
МПК: B65G 57/00, B63B 25/00, B60P 7/06
Мітки: транспортному, вантажу, спосіб, штабеля, засоби, розміщення, кріплення
Формула / Реферат:
1. Спосіб розміщення і кріплення штабеля вантажу на транспортному засобі або транспортній одиниці, що включає розміщення його навалом або в пакетованому вигляді та кріплення одиниць вантажу чи пакетів верхньої частини штабеля чи їх притискання до транспортного засобу або транспортної одиниці гнучкими кріпильними елементами, який відрізняється тим, що в процесі навантаження в штабель укладають додаткові гнучкі кріпильні елементи вільними...
Пристрій для кріплення вантажу на транспортному засобі

Номер патенту: 57890
Опубліковано: 10.03.2011
Автори: Греков Володимир Васильович, Кузнецов Валентин Володимирович, Мокін Олександр Васильович, Матета Надія Володимирівна, Туров Валентин Олексійович, Мокін Андрій Олександрович
Мітки: транспортному, кріплення, пристрій, вантажу, засоби
Формула / Реферат:
1. Пристрій для кріплення вантажу на транспортному засобі, що містить встановлену на рамі транспортного засобу опору, котра взаємодіє з кронштейном, встановленим на торці вантажу, який відрізняється тим, що він споряджений закріпленою на опорі з можливістю повороту в поперечній площині вилкою, проріз котрої звернений вгору, встановленим у порізі вилки з можливістю вертикального і поздовжнього переміщення гвинтом, на якому закріплений...
Пристрій для кріплення довгомірного вантажу на транспортному засобі
Номер патенту: 59974
Опубліковано: 10.06.2011
Автори: Мокін Андрій Олександрович, Мокін Олександр Васильович, Клименков Володимир Іванович, Нелюбін Лев Миколайович, Булатов Анатолій Вячеславович, Семенков Єфим Семенович
МПК: B60P 7/06
Мітки: вантажу, довгомірного, транспортному, пристрій, кріплення, засоби
Формула / Реферат:
1. Пристрій для кріплення довгомірного вантажу на транспортному засобі, що містить передній і задній ложементи, один з котрих виконаний у вигляді встановленої на опорі рами транспортного засобу криволінійної балки з напрямними, і захоплювачі, який відрізняється тим, що в ньому ложемент, виконаний у вигляді криволінійної балки, закріплений на опорі рами нерухомо, а захоплювачі виконані у вигляді системи гнучких елементів, наприклад тросів, що...
Пристрій для кріплення вантажу на транспортному засобі
Номер патенту: 52607
Опубліковано: 25.08.2010
Автори: Джур Євген Олексійович, Мокін Олександр Васильович, Жавиркін Віктор Петрович, Новиков Лев Дмитрович, Мокін Андрій Олександрович, Карасьов Володимир Іванович
Мітки: вантажу, транспортному, засоби, кріплення, пристрій
Формула / Реферат:
1. Пристрій для кріплення вантажу на транспортному засобі, що містить встановлений на рамі транспортного засобу кронштейн, котрий взаємодіє з розтяжкою, зв'язаною з елементом кріплення, встановленим на вантажі, який відрізняється тим, що він споряджений різноплечим важелем, шарнірно закріпленим на кронштейні за допомогою осі з можливістю повороту у площині, що перпендикулярна поздовжній осі вантажу, при цьому кожне плече важеля споряджено...
Спосіб розміщення та кріплення труб на залізничному транспортному засобі
Номер патенту: 55392
Опубліковано: 15.04.2003
Автори: Петрухіна Тетяна Іванівна, Петрухін Володимир Миколайович
МПК: B61D 3/08
Мітки: залізничному, розміщення, труб, кріплення, транспортному, спосіб, засоби
Формула / Реферат:
1. Спосіб розміщення та кріплення труб на залізничному транспортному засобі, що включає штабельне складання труб вздовж транспортного засобу в утвореному його боковими стояками навантажувальному прорізі та поперечне затягання штабелів гнучкими кріпильними елементами, який відрізняється тим, що як транспортний засіб використовують платформу, бокові стояки якої утворюють навантажувальний проріз, що звужується зверху донизу, а штабелі труб...
Попередній патент: Двотактний симетричний підсилювач струму
Наступний патент: Пристрій для контролю вводів із внутрішньою ізоляцією конденсаторного типу силового трансформатора
Випадковий патент: Спосіб отримання бетонної суміші