Літальний апарат “ма-4″

Формула / Реферат
Літальний апарат, що містить кабіну з опорно-посадочним механізмом, двигун, лопаті, закріплені на осях для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами, регулятор числа оборотів у вигляді гальма для кожного напіввала і пристрій управління лопатями, який відрізняється тим, що кабіна оснащена хвостовим оперенням, кожна лопать виконана плоскої, прямокутної форми і закріплена на осі симетрично, і він забезпечений принаймні двома диференціалами з відповідними напіввалами, кожен напіввал виконаний у вигляді з'єднаних між собою фланцями порожнистих циліндричних секцій, що мають втулки, в яких симетрично з боків кабіни принаймні двома рядами встановлені осі лопатей так, що в кожному ряду вони розташовані радіально до секції напіввала і частково входять в її порожнину, де на кінець осі кожної лопаті посаджений сектор конічної шестірні, призначений для повороту осі лопаті у втулці секції напіввала, пристрій управління лопатями кожного напіввала виконаний у вигляді кулачкових механізмів з пазовими кулачками, які розташовані в порожнинах секцій напіввала, кожен кулачковий механізм містить кулачок у вигляді диска з пазом, який закріплений на штанзі, встановленій з можливістю обертання по куту співвісно напіввалу в його порожнині і кінематично зв'язаній з важелем управління лопатями напіввала, опорний диск, який закріплений в секції напіввала, забезпечений маточиною у вигляді підшипника, в який встановлена штанга і втулками, в яких паралельно штанзі, з можливістю обертання по куту встановлені осі, причому на одному кінці кожної з осей закріплене коромисло з роликом так, що ролик входить в паз кулачка, а на іншому - закріплений сектор конічної шестірні з можливістю зачеплення з сектором конічної шестірні, посадженим на кінець відповідної осі лопаті.
Текст
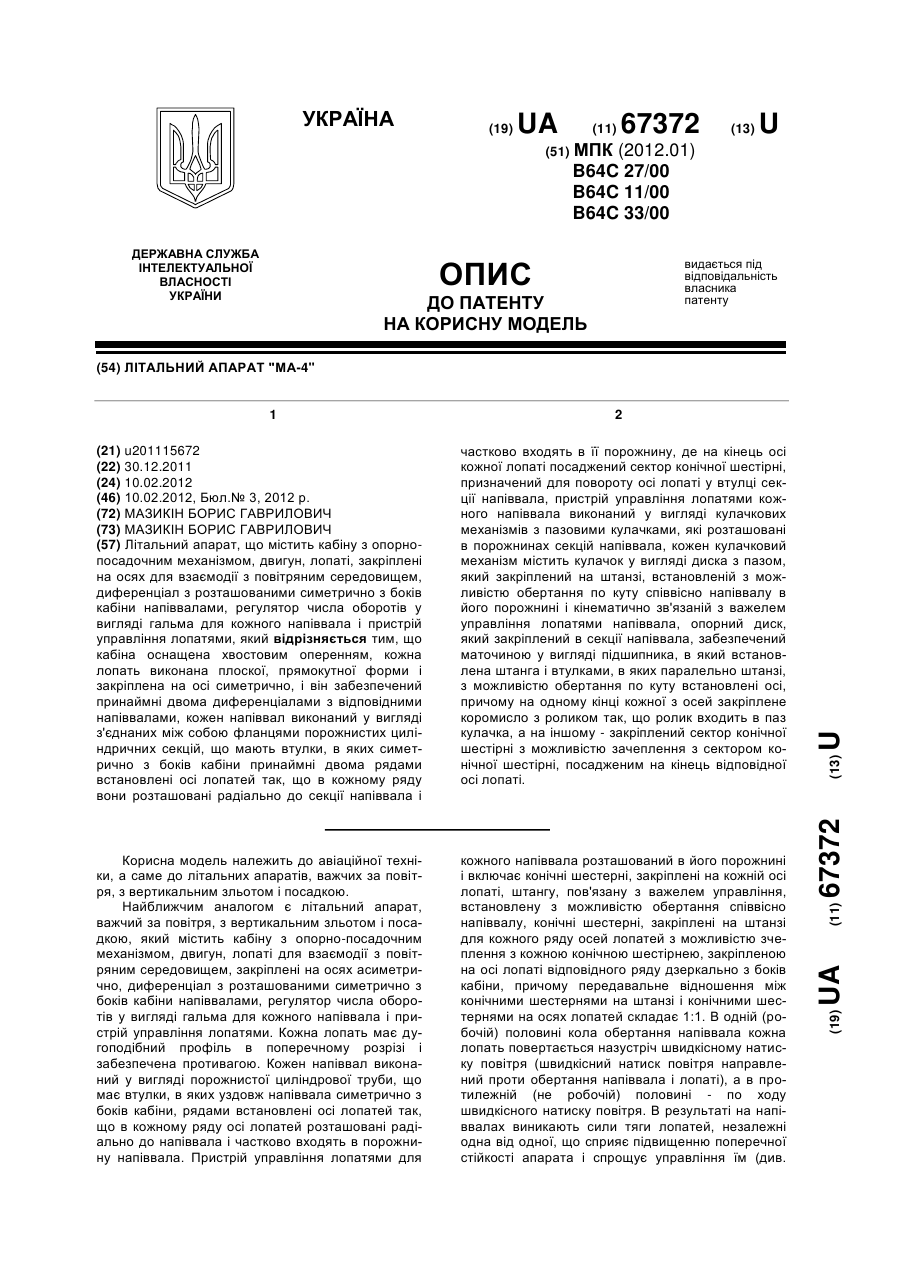
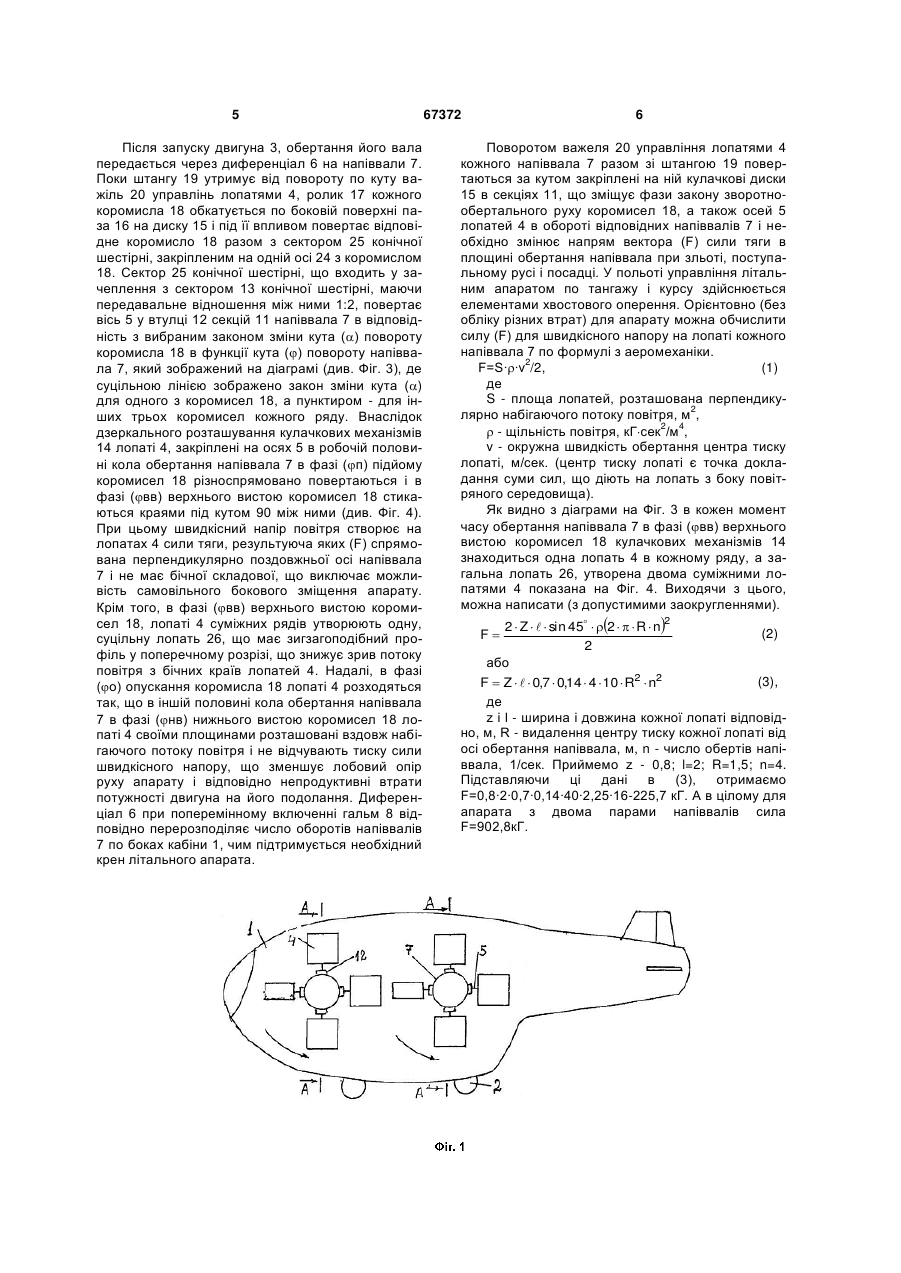
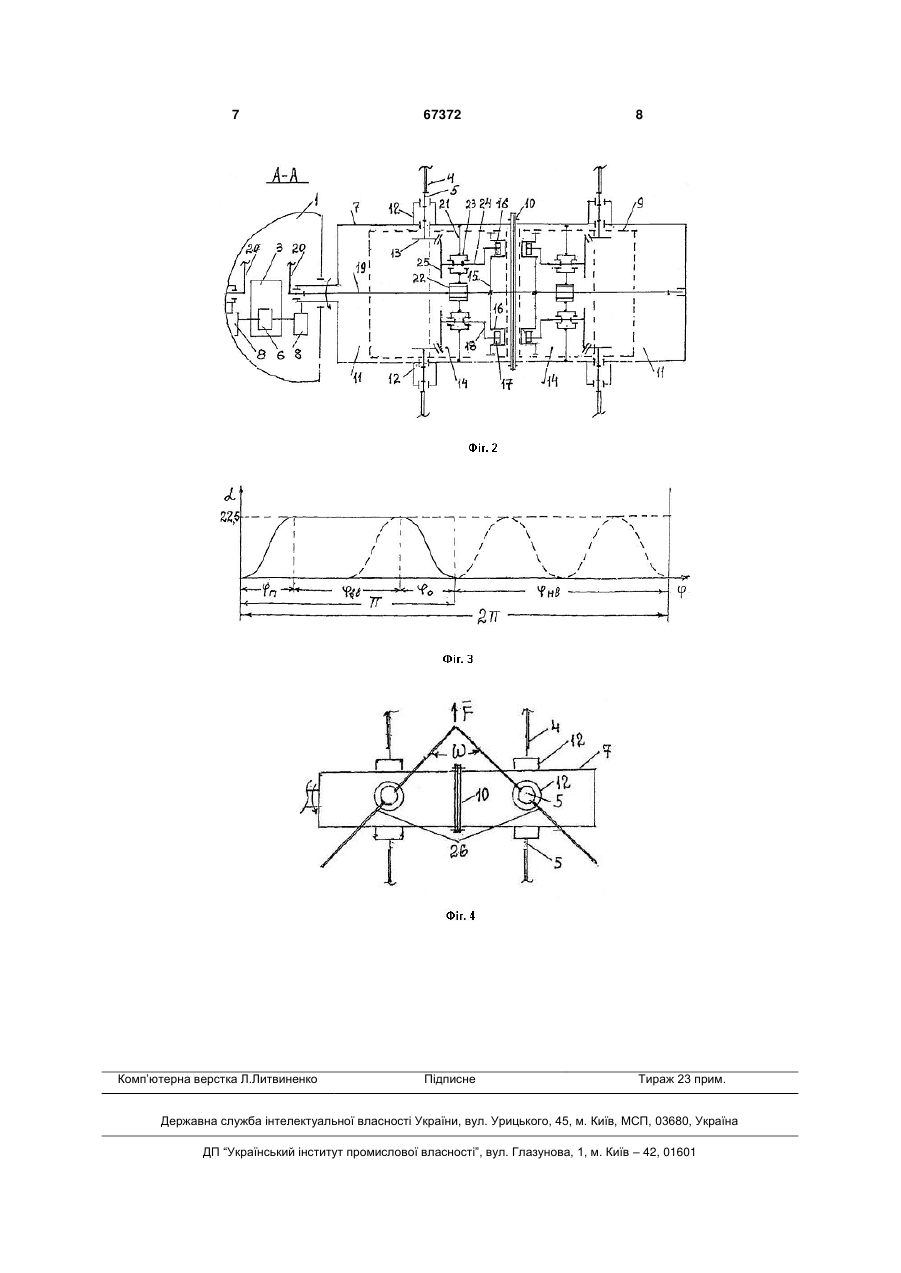
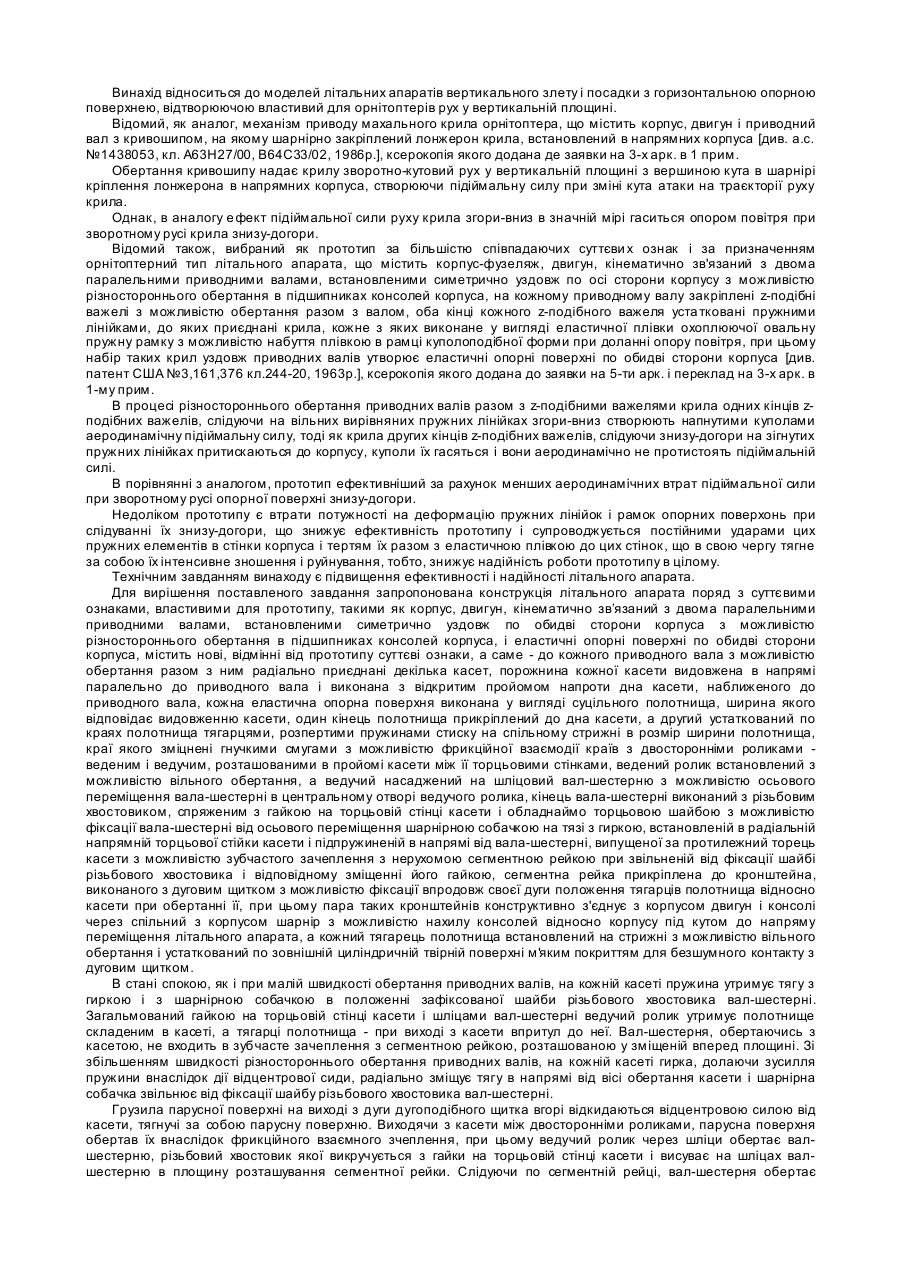
Літальний апарат, що містить кабіну з опорнопосадочним механізмом, двигун, лопаті, закріплені на осях для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами, регулятор числа оборотів у вигляді гальма для кожного напіввала і пристрій управління лопатями, який відрізняється тим, що кабіна оснащена хвостовим оперенням, кожна лопать виконана плоскої, прямокутної форми і закріплена на осі симетрично, і він забезпечений принаймні двома диференціалами з відповідними напіввалами, кожен напіввал виконаний у вигляді з'єднаних між собою фланцями порожнистих циліндричних секцій, що мають втулки, в яких симетрично з боків кабіни принаймні двома рядами встановлені осі лопатей так, що в кожному ряду вони розташовані радіально до секції напіввала і U 2 (19) 1 3 патент UA № 57440 від 10.02.2011, МПК В64С 27/00). Основним недоліком найближчого аналога є те, що із зміною швидкостей обертання лопатей по боках кабіни виникає бічна складова сил тяги лопатей, що спричиняє самовільне зміщення апарата убік напіввалів, що мають більше число оборотів. В основу корисної моделі поставлена задача створити такий літальний апарат, в якому шляхом конструктивних змін лопатей і пристрою управління ними досягається можливість виключити самовільне бічне зміщення апарату при різниці числа оборотів напіввалів по боках кабіни. Для вирішення задачі запропонований літальний апарат, що містить кабіну з опорнопосадочним механізмом, двигун, лопаті, закріплені на осях для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами, регулятор числа оборотів у вигляді гальма для кожного напіввала і пристрій управління лопатями, у якому, згідно з корисною моделлю, кабіна оснащена хвостовим оперенням, кожна лопать виконана плоскої, прямокутної форми і закріплена на осі симетрично, і який оснащений принаймні двома диференціалами з напіввалами. Кожен напіввал виконаний у вигляді з'єднаних між собою фланцями порожнистих циліндричних секцій, що мають втулки, в яких симетрично з боків кабіни принаймні двома рядами встановлені осі лопатей так, що в кожному ряду вони розташовані радіально до секції напіввала і частково входять в її порожнину, де на кінець осі кожної лопаті посаджений сектор конічної шестірні, призначений для повороту осі лопаті у втулці секції напіввала. Пристрій управління лопатями кожного напіввала виконаний у вигляді кулачкових механізмів з пазовими кулачками, які розташовані в порожнинах секцій напіввала. Кожен кулачковий механізм містить кулачок у вигляді диска з пазом для роликів коромисел, який закріплений на штанзі, встановленій з можливістю обертання по куту співвісно напіввалу в його порожнині і кінематично зв'язаній з важелем управління лопатями напіввала, опорний диск, який закріплений в секції напіввала, оснащений маточиною у вигляді підшипника, в який встановлена штанга і втулками, в яких паралельно штанзі, з можливістю обертання по куту встановлені осі, причому на одному кінці кожної з осей закріплене коромисло з роликом так, що ролик входить в паз кулачка, а на іншому - закріплений сектор конічної шестірні з можливістю зачеплення з сектором конічної шестірні, посадженим на кінець відповідної осі лопаті. Суть конструкції літального апарата, що заявляється, пояснюється кресленнями, де: На фіг. 1 показаний літальний апарат з двома парами напіввалів, що складаються з двох секцій кожен з чотирма лопатями в кожному ряду, вигляд збоку. На фіг. 2 - розріз по А-А фіг. 1. На фіг. 3 представлена діаграма закону зміни кутів повороту коромисел у функції кутів повороту напіввала. 67372 4 На фіг. 4 показаний напіввал з лопатями у фазі верхнього вистою коромисел, вид спереду апарата. Літальний апарат (один з можливих варіантів) містить кабіну 1 з хвостовим оперенням і опорнопосадочним механізмом 2 (показані тільки колеса), двигун 3, лопаті 4, закріплені на осях 5 для взаємодії з повітряним середовищем, диференціал 6 з розташованими симетрично з боків кабіни 1 напіввалами 7, регулятор числа оборотів напіввалів 7 у вигляді гальма 8 і пристрій 9 управління лопатями 4 для кожного з них. Кожна лопать 4 виконана плоскою, прямокутної форми і закріплена на осі 5 симетрично. Кожний напіввал 7 (див. фіг. 2) виконаний у вигляді зв'язаних між собою фланцями 10 порожнистих циліндричних секцій 11, що мають втулки 12, в яких симетрично з боків кабіни 1, рядами встановлені осі 5 лопатей 4 так, що в кожному ряду осі 5 лопатей 4 розташовані радіально до секції 11 напіввала 7 і частково входять в її порожнину, де на кінець кожної осі 5 лопаті 4 посаджений сектор 13 конічної шестірні, призначений для повороту осі 5 лопаті 4 у втулці 12 секції 11 напіввала 7. Пристрій 9 управління лопатями 4 кожного напіввала 7 виконаний у вигляді кулачкових механізмів 14 з пазовими кулачками, які розташовані в порожнині кожної секції 11 напіввала 7. Кожний кулачковий механізм 14 містить кулачок у вигляді диска 15 з пазом 16 для роликів 17 коромисел 18, який закріплений на штанзі 19, встановленої співвісно напіввалу 7 з можливістю обертання по куту і кінематично пов'язаної з важелем 20 управління лопатями 4, опорний диск 21, який закріплений в секції 11 напіввала 7, забезпечений маточиною у вигляді підшипника 22, в який встановлена штанга 19 і втулками 23, в яких паралельно штанзі 19 з можливістю обертання по куту встановлені осі 24. На одному кінці кожної з осей 24 закріплено коромисло 18 так, що його ролик 17 входить в паз 16 на диску 15 кулачка, а на іншому, з іншого боку опорного диска 21, закріплений сектор 25 конічної шестірні з можливістю зчеплення з сектором 13 конічної шестірні, посадженим на кінець відповідної осі 5 лопаті 4 в порожнині секції 11 напіввала 7. Профілі кулачків і параметри ланок механізму 14 виконані так, що максимальний кут повороту () кожного коромисла 18 в обороті напіввала 7 становить 22,5°. Передавальне відношення між секторами 25 і 13 конічних шестерень обраний рівним 1:2. Лопаті 4 виконані з можливістю збіжності в робочій половині кола обертання напіввала 7 до взаємного дотику бічними краями у фазі верхнього вистою коромисел 18 під кутом () рівним 90. На кресленнях не розкриті конструкція хвостового оперення кабіни 1, а також елементи 2, 3, 6, 8, які відомі в різних варіантах їх виконання. Передача обертання вала двигуна 3 на напіввали 7 і зв'язок штанги 19 з важелем 20 керування лопатями 4 можуть бути здійснені різними способами. Число диференціалів 6 з напіввалами 7, секцій 11 і осей 5 із лопатями 4 на них залежить від призначення і необхідної вантажопідйомності літального апарата. Робота літального апарата. 5 Після запуску двигуна 3, обертання його вала передається через диференціал 6 на напіввали 7. Поки штангу 19 утримує від повороту по куту важіль 20 управлінь лопатями 4, ролик 17 кожного коромисла 18 обкатується по боковій поверхні паза 16 на диску 15 і під її впливом повертає відповідне коромисло 18 разом з сектором 25 конічної шестірні, закріпленим на одній осі 24 з коромислом 18. Сектор 25 конічної шестірні, що входить у зачеплення з сектором 13 конічної шестірні, маючи передавальне відношення між ними 1:2, повертає вісь 5 у втулці 12 секцій 11 напіввала 7 в відповідність з вибраним законом зміни кута () повороту коромисла 18 в функції кута () повороту напіввала 7, який зображений на діаграмі (див. Фіг. 3), де суцільною лінією зображено закон зміни кута () для одного з коромисел 18, а пунктиром - для інших трьох коромисел кожного ряду. Внаслідок дзеркального розташування кулачкових механізмів 14 лопаті 4, закріплені на осях 5 в робочій половині кола обертання напіввала 7 в фазі (п) підйому коромисел 18 різноспрямовано повертаються і в фазі (вв) верхнього вистою коромисел 18 стикаються краями під кутом 90 між ними (див. Фіг. 4). При цьому швидкісний напір повітря створює на лопатах 4 сили тяги, результуюча яких (F) спрямована перпендикулярно поздовжньої осі напіввала 7 і не має бічної складової, що виключає можливість самовільного бокового зміщення апарату. Крім того, в фазі (вв) верхнього вистою коромисел 18, лопаті 4 суміжних рядів утворюють одну, суцільну лопать 26, що має зигзагоподібний профіль у поперечному розрізі, що знижує зрив потоку повітря з бічних країв лопатей 4. Надалі, в фазі (о) опускання коромисла 18 лопаті 4 розходяться так, що в іншій половині кола обертання напіввала 7 в фазі (нв) нижнього вистою коромисел 18 лопаті 4 своїми площинами розташовані вздовж набігаючого потоку повітря і не відчувають тиску сили швидкісного напору, що зменшує лобовий опір руху апарату і відповідно непродуктивні втрати потужності двигуна на його подолання. Диференціал 6 при поперемінному включенні гальм 8 відповідно перерозподіляє число оборотів напіввалів 7 по боках кабіни 1, чим підтримується необхідний крен літального апарата. 67372 6 Поворотом важеля 20 управління лопатями 4 кожного напіввала 7 разом зі штангою 19 повертаються за кутом закріплені на ній кулачкові диски 15 в секціях 11, що зміщує фази закону зворотнообертального руху коромисел 18, а також осей 5 лопатей 4 в обороті відповідних напіввалів 7 і необхідно змінює напрям вектора (F) силитяги в площині обертання напіввала при зльоті, поступальному русі і посадці. У польоті управління літальним апаратом по тангажу і курсу здійснюється елементами хвостового оперення. Орієнтовно (без обліку різних втрат) для апарату можна обчислити силу (F) для швидкісного напору на лопаті кожного напіввала 7 по формулі з аеромеханіки. 2 (1) F=S∙∙v /2, де S - площа лопатей, розташована перпендику2 лярно набігаючого потоку повітря, м , 2 4 - щільність повітря, кГсек /м , v - окружна швидкість обертання центра тиску лопаті, м/сек. (центр тиску лопаті є точка докладання суми сил, що діють на лопать з боку повітряного середовища). Як видно з діаграми на Фіг. 3 в кожен момент часу обертання напіввала 7 в фазі (вв) верхнього вистою коромисел 18 кулачкових механізмів 14 знаходиться одна лопать 4 в кожному ряду, а загальна лопать 26, утворена двома суміжними лопатями 4 показана на Фіг. 4. Виходячи з цього, можна написати (з допустимими заокругленнями). 2 Z sin 45 2 R n2 2 або F (2) (3), F Z 0,7 0,14 4 10 R2 n2 де z і l - ширина і довжина кожної лопаті відповідно, м, R - видалення центру тиску кожної лопаті від осі обертання напіввала, м, n - число обертів напіввала, 1/сек. Приймемо z - 0,8; l=2; R=1,5; n=4. Підставляючи ці дані в (3), отримаємо F=0,8∙2∙0,7∙0,14∙40∙2,25∙16-225,7 кГ. А в цілому для апарата з двома парами напіввалів сила F=902,8кГ. 7 Комп’ютерна верстка Л.Литвиненко 67372 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft "ma-4"
Автори англійськоюMazykin Borys Havrylovych
Назва патенту російськоюЛетательный аппарат "ма-4"
Автори російськоюМазыкин Борис Гаврилович
МПК / Мітки
МПК: B64C 33/00, B64C 27/00, B64C 11/00
Мітки: ма-4, літальний, апарат
Код посилання
<a href="https://ua.patents.su/4-67372-litalnijj-aparat-ma-4.html" target="_blank" rel="follow" title="База патентів України">Літальний апарат “ма-4″</a>
Літальний апарат “ма-3″

Номер патенту: 57240
Опубліковано: 10.02.2011
Автор: Мазикін Борис Гаврилович
МПК: B64C 27/00, B64C 33/00, B64C 11/00
Мітки: ма-3, літальний, апарат
Формула / Реферат:
Літальний апарат, що містить кабіну з опорно-посадочним механізмом, двигун, лопаті, встановлені на осях асиметрично для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами і пристрій керування лопатями, який відрізняється тим, що кожна лопать на осі має в поперечному перерізі дугоподібний профіль і оснащена противагою, кожен напіввал виконаний у вигляді порожнистої циліндричної труби, що має...
Літальний апарат

Номер патенту: 51793
Опубліковано: 16.12.2002
Автор: Мазикін Борис Гаврилович
МПК: B64C 39/00
Формула / Реферат:
1. Літальний апарат, який має кабіну з посадочно-опорним механізмом, двигун, кінематично зв'язаний з взаємодіючими з повітряним середовищем лопатями, і прилад управління, який відрізняється тим, що він має лопаті, які попарно установлені щонайменше на двох спільних осях, які мають важелі, з зсувом між лопатями на кут 90°, причому осі лопатей закріплені симетрично і перпендикулярно щодо центрального піввала з можливістю повороту у втулках на...
Безпілотний літальний апарат (бпла)

Номер патенту: 63124
Опубліковано: 26.09.2011
Автори: Харченко Володимир Петрович, Священко Юрій Іванович, Корченюк Вячеслав Павлович
МПК: B64C 3/38
Мітки: апарат, безпілотний, бпла, літальний
Формула / Реферат:
1. Безпілотний літальний апарат (БПЛА), що містить крило із центропланною та від'ємною частинами, внутрішні та зовнішні секції елеронів із протифлатерним вантажем на носках їх нерв'юр, який відрізняється тим, що протифлатерний вантаж виконаний у вигляді вузла приводу-рознімання секцій елерона.2. Безпілотний літальний апарат за п. 1, який відрізняється тим, що вказаний вузол приводу-рознімання виконаний у вигляді двох елементів,...
Безкільовий літальний апарат

Номер патенту: 13450
Опубліковано: 17.04.2006
Автор: Цюренко Валентин Андрійович
МПК: B64C 39/02, B64C 29/00
Мітки: апарат, літальний, безкільовий
Формула / Реферат:
1. Безкільовий літальний апарат, що складається зі зв’язаних в єдиний робочий комплекс кабіни для пілотів з приладами для навігації, відсіку для ємностей з паливом та з речовинами, необхідними для життєдіяльності людей, рухомої платформи з закріпленим двигуном, турбіни вертикального зльоту та посадки з автономним приводом від двигуна та висувних штанг для приземлення, що містить самогравітаційну турбіну, яка знаходиться зовні робочого...
Літальний апарат
Номер патенту: 78859
Опубліковано: 25.04.2007
Автор: Охримович Роман Володимирович
МПК: B64C 27/00, B64C 33/00
Формула / Реферат:
Літальний апарат, що має корпус, двигун, кінематично зв'язаний з двома паралельними привідними валами, встановленими симетрично уздовж по обидві сторони корпуса з можливістю різностороннього обертання в підшипниках консолей корпуса, і парусні поверхні по обидві сторони корпуса, який відрізняється тим, що до кожного привідного вала з можливістю обертання разом з ним радіально приєднані касети, видовжені в напрямі, паралельному до привідного...
Попередній патент: Футерівка барабанного млина
Наступний патент: Складаний предмет меблів
Випадковий патент: Комбінована гальмова система без елементів тертя із системою авs