Магнітомодуляційний датчик
Формула / Реферат
Магнітомодуляційний датчик, що містить дві взаємно перпендикулярні пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують функцію модуляторів, який відрізняється тим, що застосовано додаткові дві пари двострижневих диференціальних ферозондів, розташовані перпендикулярно осям основних пар двострижневих диференціальних ферозондів, при цьому на стрижнях ферозондів додаткових пар розміщено обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано послідовно узгоджено з обмотками збудження основних пар двострижневих диференціальних ферозондів.
Текст
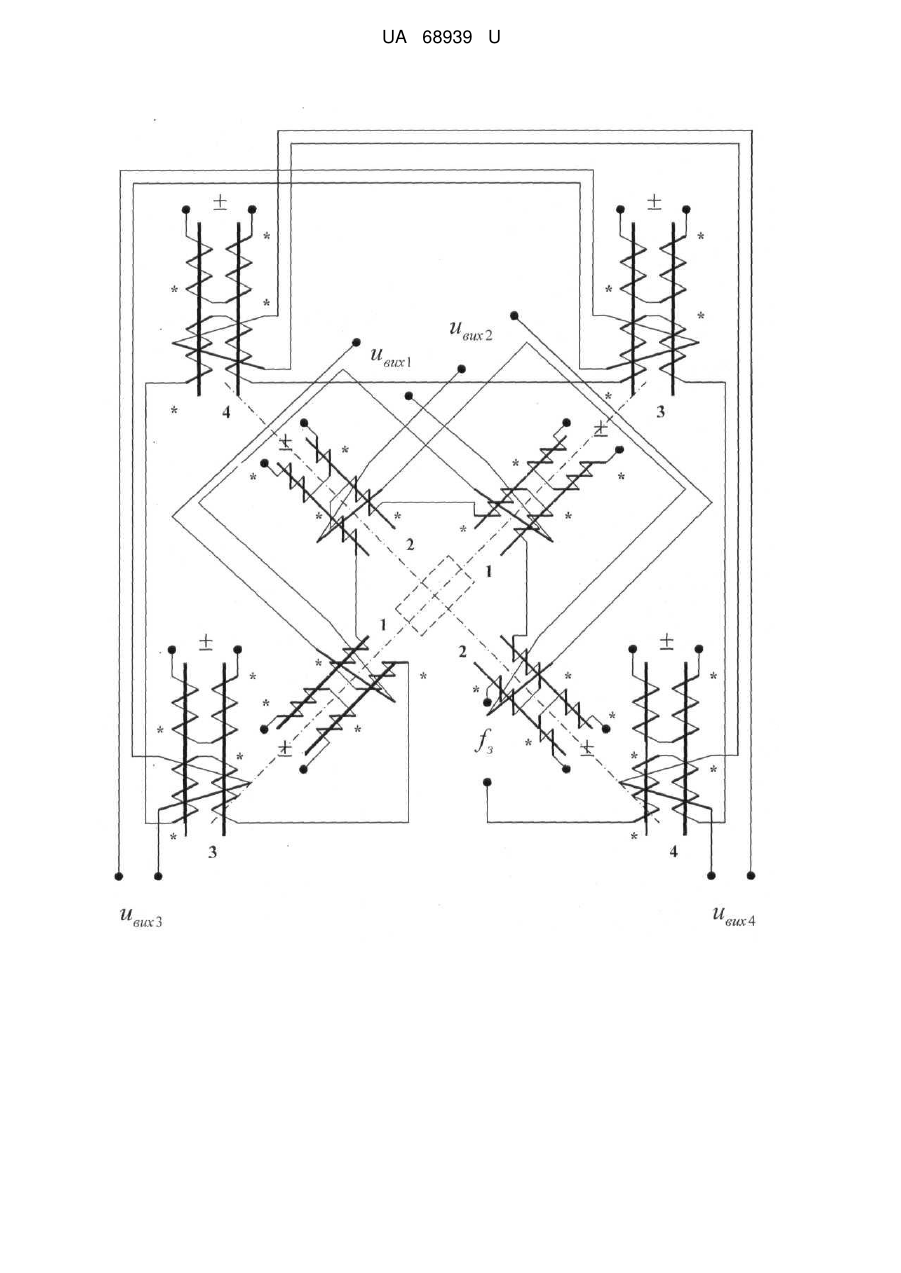
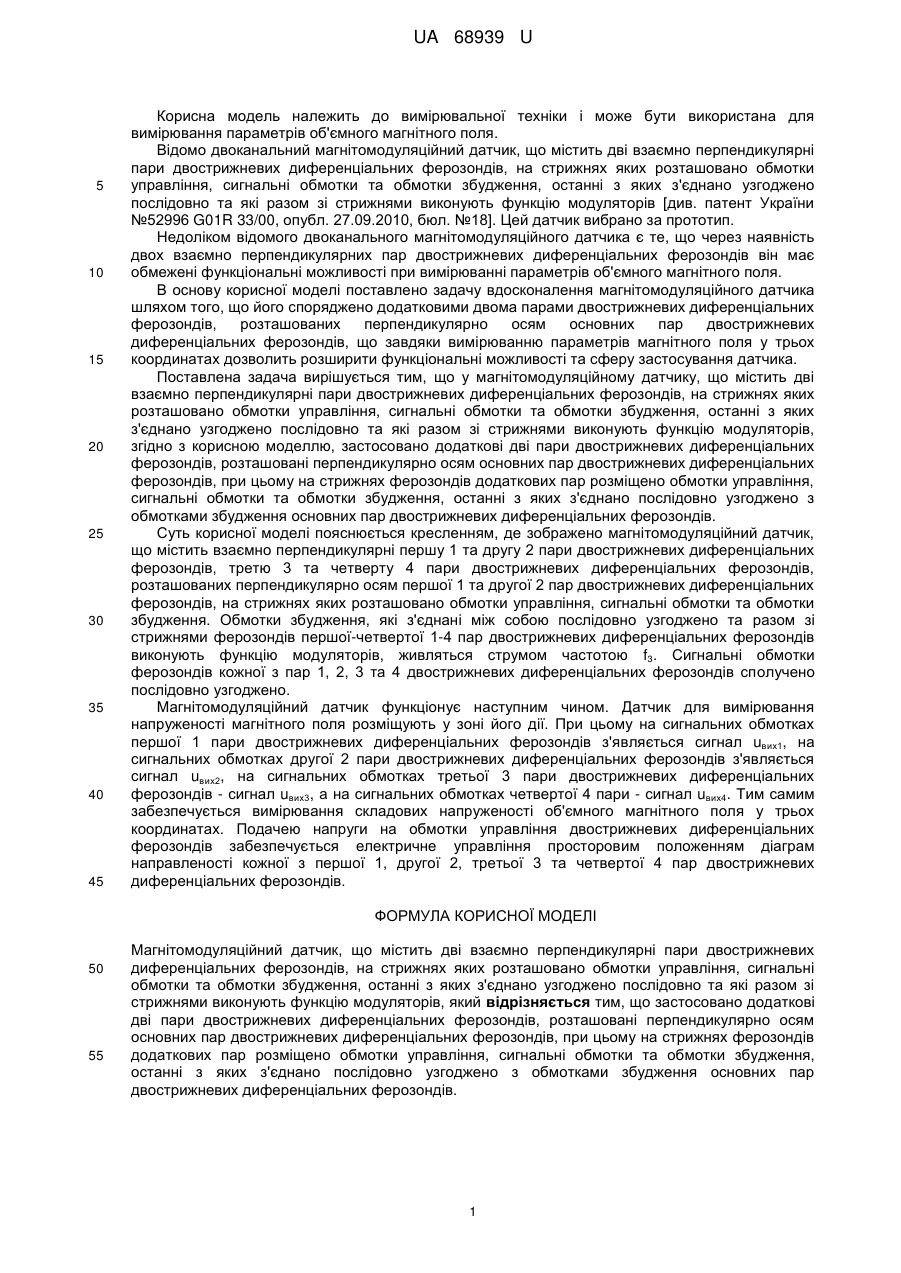
Реферат: UA 68939 U UA 68939 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до вимірювальної техніки і може бути використана для вимірювання параметрів об'ємного магнітного поля. Відомо двоканальний магнітомодуляційний датчик, що містить дві взаємно перпендикулярні пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують функцію модуляторів [див. патент України №52996 G01R 33/00, опубл. 27.09.2010, бюл. №18]. Цей датчик вибрано за прототип. Недоліком відомого двоканального магнітомодуляційного датчика є те, що через наявність двох взаємно перпендикулярних пар двострижневих диференціальних ферозондів він має обмежені функціональні можливості при вимірюванні параметрів об'ємного магнітного поля. В основу корисної моделі поставлено задачу вдосконалення магнітомодуляційного датчика шляхом того, що його споряджено додатковими двома парами двострижневих диференціальних ферозондів, розташованих перпендикулярно осям основних пар двострижневих диференціальних ферозондів, що завдяки вимірюванню параметрів магнітного поля у трьох координатах дозволить розширити функціональні можливості та сферу застосування датчика. Поставлена задача вирішується тим, що у магнітомодуляційному датчику, що містить дві взаємно перпендикулярні пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують функцію модуляторів, згідно з корисною моделлю, застосовано додаткові дві пари двострижневих диференціальних ферозондів, розташовані перпендикулярно осям основних пар двострижневих диференціальних ферозондів, при цьому на стрижнях ферозондів додаткових пар розміщено обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано послідовно узгоджено з обмотками збудження основних пар двострижневих диференціальних ферозондів. Суть корисної моделі пояснюється кресленням, де зображено магнітомодуляційний датчик, що містить взаємно перпендикулярні першу 1 та другу 2 пари двострижневих диференціальних ферозондів, третю 3 та четверту 4 пари двострижневих диференціальних ферозондів, розташованих перпендикулярно осям першої 1 та другої 2 пар двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження. Обмотки збудження, які з'єднані між собою послідовно узгоджено та разом зі стрижнями ферозондів першої-четвертої 1-4 пар двострижневих диференціальних ферозондів виконують функцію модуляторів, живляться струмом частотою f3. Сигнальні обмотки ферозондів кожної з пар 1, 2, 3 та 4 двострижневих диференціальних ферозондів сполучено послідовно узгоджено. Магнітомодуляційний датчик функціонує наступним чином. Датчик для вимірювання напруженості магнітного поля розміщують у зоні його дії. При цьому на сигнальних обмотках першої 1 пари двострижневих диференціальних ферозондів з'являється сигнал uвих1, на сигнальних обмотках другої 2 пари двострижневих диференціальних ферозондів з'являється сигнал uвих2, на сигнальних обмотках третьої 3 пари двострижневих диференціальних ферозондів - сигнал uвих3, а на сигнальних обмотках четвертої 4 пари - сигнал uвих4. Тим самим забезпечується вимірювання складових напруженості об'ємного магнітного поля у трьох координатах. Подачею напруги на обмотки управління двострижневих диференціальних ферозондів забезпечується електричне управління просторовим положенням діаграм направленості кожної з першої 1, другої 2, третьої 3 та четвертої 4 пар двострижневих диференціальних ферозондів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Магнітомодуляційний датчик, що містить дві взаємно перпендикулярні пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують функцію модуляторів, який відрізняється тим, що застосовано додаткові дві пари двострижневих диференціальних ферозондів, розташовані перпендикулярно осям основних пар двострижневих диференціальних ферозондів, при цьому на стрижнях ферозондів додаткових пар розміщено обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано послідовно узгоджено з обмотками збудження основних пар двострижневих диференціальних ферозондів. 1 UA 68939 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMagneto-modulation sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюМагнитомодуляционный датчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01R 33/00
Мітки: датчик, магнітомодуляційний
Код посилання
<a href="https://ua.patents.su/4-68939-magnitomodulyacijjnijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Магнітомодуляційний датчик</a>
Магнітомодуляційний датчик
Номер патенту: 60455
Опубліковано: 25.06.2011
Автор: Смірний Михайло Федорович
МПК: G01R 33/09
Мітки: датчик, магнітомодуляційний
Формула / Реферат:
Магнітомодуляційний датчик, що містить дві взаємно перпендикулярні пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують функцію модуляторів, який відрізняється тим, що розташовано додаткову пару двострижневих диференціальних ферозондів, розміщену перпендикулярно основним парам...
Двоканальний магнітомодуляційний датчик

Номер патенту: 52996
Опубліковано: 27.09.2010
Автор: Смірний Михайло Федорович
МПК: G01R 33/00
Мітки: двоканальний, магнітомодуляційний, датчик
Формула / Реферат:
Двоканальний магнітомодуляційний датчик, що містить дві взаємно перпендикулярні пари феритових концентраторів, який відрізняється тим, що як дві взаємно перпендикулярні пари феритових стрижнів-концентраторів застосовано дві пари двострижневих диференціальних ферозондів, на стрижнях яких розташовано обмотки управління, сигнальні обмотки та обмотки збудження, останні з яких з'єднано узгоджено послідовно та які разом зі стрижнями виконують...
Магнітомодуляційний датчик
Номер патенту: 61658
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01R 33/00
Мітки: магнітомодуляційний, датчик
Формула / Реферат:
Магнітомодуляційний датчик, що містить кільце-модулятор та дві взаємно перпендикулярні пари феритових концентраторів, стрижні-концентратори мають наскрізні прорізи, на стінках яких намотано обмотки керування, з'єднані попарно послідовно, який відрізняється тим, що застосовано додаткове кільце-модулятор та додаткову пару феритових концентраторів, розташовану відносно основних пар феритових концентраторів у взаємно перпендикулярній площині,...
Магнітомодуляційний датчик
Номер патенту: 60686
Опубліковано: 25.06.2011
Автор: Смірний Михайло Федорович
МПК: G01R 33/00
Мітки: магнітомодуляційний, датчик
Формула / Реферат:
Магнітомодуляційний датчик, що містить кільце-модулятор та дві взаємно перпендикулярні пари феритових концентраторів, стрижні-концентратори мають наскрізні прорізи, на стінках яких намотано обмотки управління, з'єднані попарно послідовно, який відрізняється тим, що застосовано два додаткові кільця-модулятори, розташовані відносно основного кільця-модулятора у взаємно перпендикулярних площинах, та додаткову пару феритових концентраторів,...
Датчик переміщень
Номер патенту: 68524
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, переміщень
Формула / Реферат:
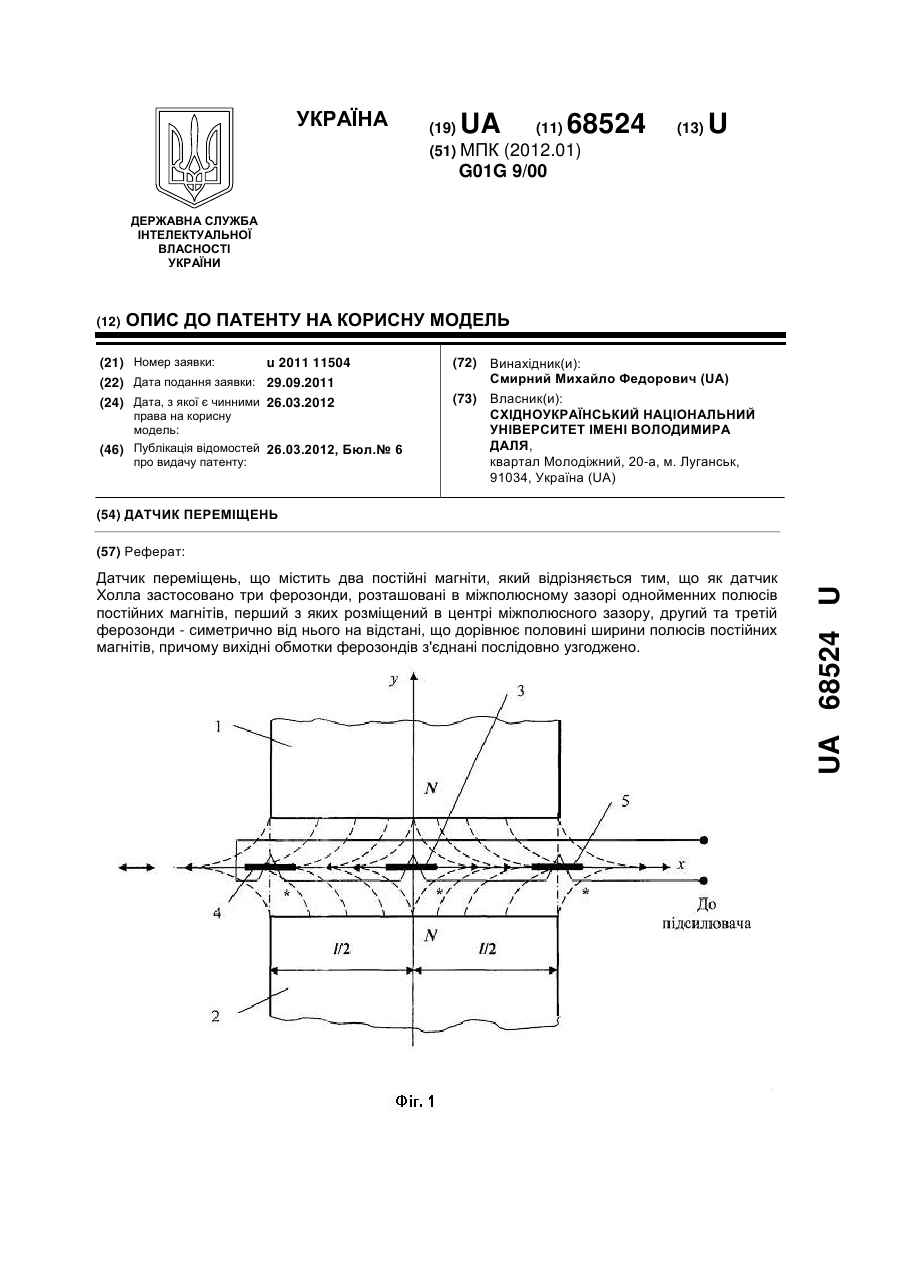
Датчик переміщень, що містить два постійні магніти, який відрізняється тим, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі однойменних полюсів постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, причому вихідні обмотки ферозондів з'єднані послідовно узгоджено.
Попередній патент: Респіратор
Наступний патент: Ваговимірювальний датчик
Випадковий патент: Застосування пектину плодів глоду як засобу імуномоделюючої дії