Інерціальний вимірювальний модуль
Номер патенту: 69336
Опубліковано: 25.04.2012

Формула / Реферат
Інерціальний вимірювальний модуль для навігаційних систем, що містить три одновісних мікромеханічних гіроскопа, два двовісних лінійних акселерометра та два магнітометра, який відрізняється тим, що живлення та інформаційний зв'язок з моделлю відбувається через один USB-порт персонального комп'ютера.
Текст
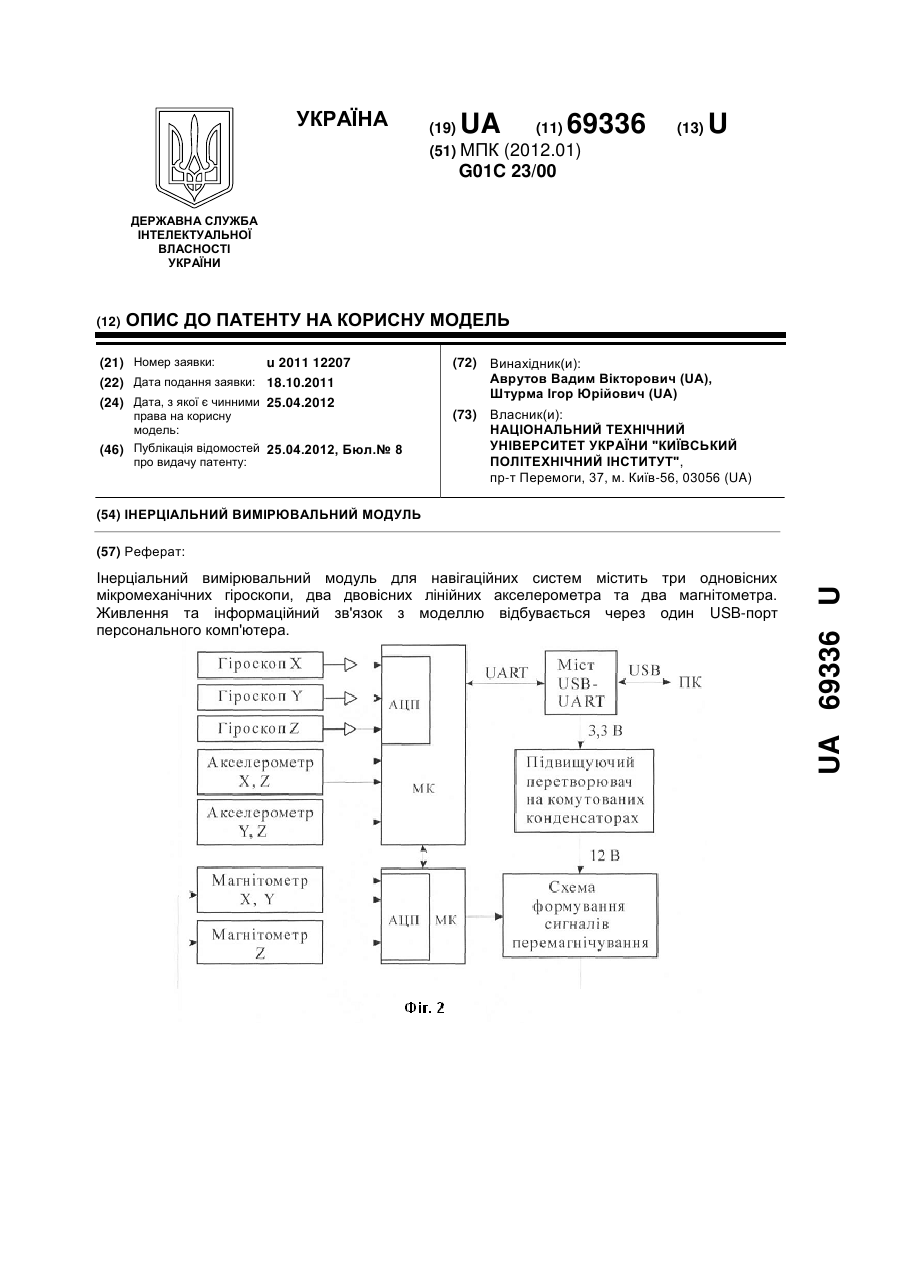
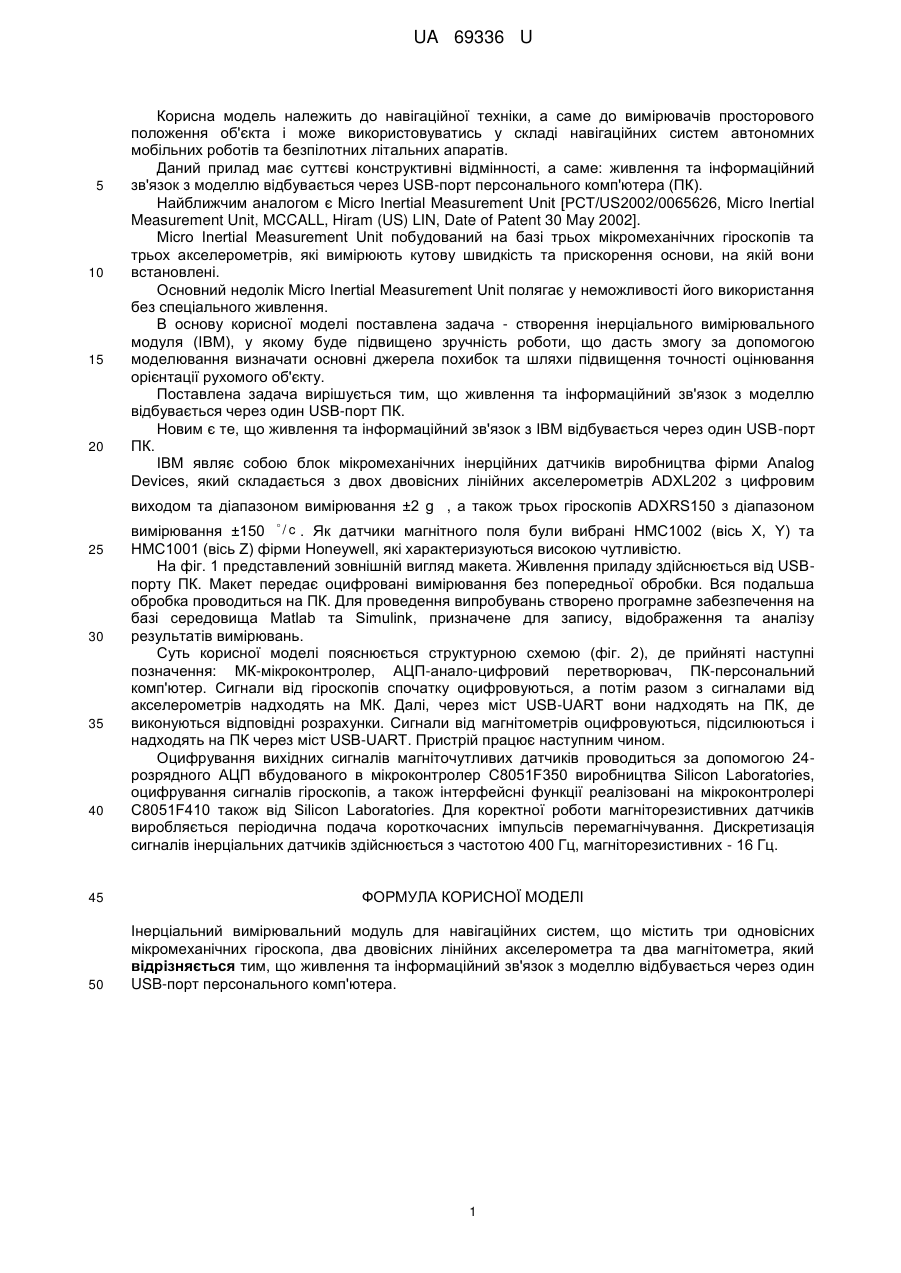
Реферат: UA 69336 U UA 69336 U 5 10 15 20 Корисна модель належить до навігаційної техніки, а саме до вимірювачів просторового положення об'єкта і може використовуватись у складі навігаційних систем автономних мобільних роботів та безпілотних літальних апаратів. Даний прилад має суттєві конструктивні відмінності, а саме: живлення та інформаційний зв'язок з моделлю відбувається через USB-порт персонального комп'ютера (ПК). Найближчим аналогом є Micro Inertial Measurement Unit [PCT/US2002/0065626, Micro Inertial Measurement Unit, MCCALL, Hiram (US) LIN, Date of Patent 30 May 2002]. Micro Inertial Measurement Unit побудований на базі трьох мікромеханічних гіроскопів та трьох акселерометрів, які вимірюють кутову швидкість та прискорення основи, на якій вони встановлені. Основний недолік Micro Inertial Measurement Unit полягає у неможливості його використання без спеціального живлення. В основу корисної моделі поставлена задача - створення інерціального вимірювального модуля (IBM), у якому буде підвищено зручність роботи, що дасть змогу за допомогою моделювання визначати основні джерела похибок та шляхи підвищення точності оцінювання орієнтації рухомого об'єкту. Поставлена задача вирішується тим, що живлення та інформаційний зв'язок з моделлю відбувається через один USB-порт ПК. Новим є те, що живлення та інформаційний зв'язок з IBM відбувається через один USB-порт ПК. IBM являє собою блок мікромеханічних інерційних датчиків виробництва фірми Analog Devices, який складається з двох двовісних лінійних акселерометрів ADXL202 з цифровим виходом та діапазоном вимірювання ±2 g , а також трьох гіроскопів ADXRS150 з діапазоном 25 30 35 40 вимірювання ±150 / c . Як датчики магнітного поля були вибрані HMC1002 (вісь X, Y) та НМС1001 (вісь Z) фірми Honeywell, які характеризуються високою чутливістю. На фіг. 1 представлений зовнішній вигляд макета. Живлення приладу здійснюється від USBпорту ПК. Макет передає оцифровані вимірювання без попередньої обробки. Вся подальша обробка проводиться на ПК. Для проведення випробувань створено програмне забезпечення на базі середовища Matlab та Simulink, призначене для запису, відображення та аналізу результатів вимірювань. Суть корисної моделі пояснюється структурною схемою (фіг. 2), де прийняті наступні позначення: МК-мікроконтролер, АЦП-анало-цифровий перетворювач, ПК-персональний комп'ютер. Сигнали від гіроскопів спочатку оцифровуються, а потім разом з сигналами від акселерометрів надходять на МК. Далі, через міст USB-UART вони надходять на ПК, де виконуються відповідні розрахунки. Сигнали від магнітометрів оцифровуються, підсилюються і надходять на ПК через міст USB-UART. Пристрій працює наступним чином. Оцифрування вихідних сигналів магніточутливих датчиків проводиться за допомогою 24розрядного АЦП вбудованого в мікроконтролер C8051F350 виробництва Silicon Laboratories, оцифрування сигналів гіроскопів, а також інтерфейсні функції реалізовані на мікроконтролері C8051F410 також від Silicon Laboratories. Для коректної роботи магніторезистивних датчиків виробляється періодична подача короткочасних імпульсів перемагнічування. Дискретизація сигналів інерціальних датчиків здійснюється з частотою 400 Гц, магніторезистивних - 16 Гц. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Інерціальний вимірювальний модуль для навігаційних систем, що містить три одновісних мікромеханічних гіроскопа, два двовісних лінійних акселерометра та два магнітометра, який відрізняється тим, що живлення та інформаційний зв'язок з моделлю відбувається через один USB-порт персонального комп'ютера. 1 UA 69336 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial measuring module
Автори англійськоюAvrutov Vadym Viktorovych, Shturma Ihor Yuriiovych
Назва патенту російськоюИнерциальный измерительный модуль
Автори російськоюАврутов Вадим Викторович, Штурма Игорь Юрьевич
МПК / Мітки
МПК: G01C 23/00
Мітки: інерціальній, вимірювальний, модуль
Код посилання
<a href="https://ua.patents.su/4-69336-inercialnijj-vimiryuvalnijj-modul.html" target="_blank" rel="follow" title="База патентів України">Інерціальний вимірювальний модуль</a>
Інерціальний вимірювальний блок
Номер патенту: 55276
Опубліковано: 10.12.2010
Автори: Пономарьов Вадим Сергійович, Гордін Олександр Григорович, Кописов Олег Едуардович
МПК: G01C 21/00
Мітки: інерціальній, вимірювальний, блок
Формула / Реферат:
1. Інерціальний вимірювальний блок, що містить як вимірювачі три однокомпонентних гіроскопічних датчики кутової швидкості, три однокомпонентних маятникових акселерометри, який відрізняється тим, що в нього введені додаткові однокомпонентний гіроскопічний датчик кутової швидкості і однокомпонентний маятниковий акселерометр та система обробки інформації, а осі чутливості всіх вимірювачів розташовані по твірних конуса та мають спільний початок...
Інерціальний вимірювальний блок
Номер патенту: 37386
Опубліковано: 25.11.2008
Автори: Гордін Олександр Григорович, Шульгіна Людмила Андріївна
МПК: G01P 9/00
Мітки: блок, інерціальній, вимірювальний
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та три однокомпонентних маятникових акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, який відрізняється тим, що однокомпонентні гіроскопічні датчики кутової швидкості та однокомпонентні маятникові акселерометри зорієнтовані на об'єкті таким чином, що осі підвісу рухомих елементів...
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Шипітько Олена Олександрівна, Гордін Олександр Григорович, Калашникова Валерія Михайлівна
МПК: G01C 21/00
Мітки: функціонально-надлишковий, вимірювальний, блок, інерціальній
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Інерціальний вимірювальний блок
Номер патенту: 54017
Опубліковано: 25.10.2010
Автори: Кулік Анатолій Степанович, Кописов Олег Едуардович, Гордін Олександр Григорович, Пономарьов Вадим Сергійович
МПК: G01P 9/00
Мітки: інерціальній, вимірювальний, блок
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентні гіроскопічні датчики кутової швидкості, три однокомпонентні маятникові акселерометри, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів датчиків взаємно ортогональні та кожна з них паралельна відповідній осі зв'язаної з об'єктом ортогональної системи координат, осі підвісу рухомих елементів однокомпонентних...
Інерціальний вимірювальний блок
Номер патенту: 46952
Опубліковано: 11.01.2010
Автори: Гордін Олександр Григорович, Тамбова Ольга Сергіївна
МПК: G01P 9/04
Мітки: блок, вимірювальний, інерціальній
Формула / Реферат:
Інерціальний вимірювальний блок, що містить три однокомпонентних гіроскопічних датчики кутової швидкості, який відрізняється тим, що в нього введено три гіроскопічних інтегратори лінійних прискорень з міжрамочною корекцією, осі чутливості яких паралельні осям зв'язаної з об'єктом ортогональної системи координат, при цьому осі чутливості гіроскопічних інтеграторів лінійних прискорень взаємоортогональні та кожна з них паралельна відповідній...
Попередній патент: Ливарний сплав системи al-mg
Наступний патент: Пристрій (фітинг) для з’єднання трубопроводів та/або гідроагрегатів
Випадковий патент: Металоприймач проміжного ковша