Перетворювач динамічних векторів взаємодії пневмоколіс транспортного засобу з покриттям автошляхів у електричні величини (перетворювач рахубовського)
Формула / Реферат
1. Перетворювач динамічних векторів взаємодії пневмоколіс транспортного засобу з покриттям автошляхів у електричні величини, що відображає направлення векторів у горизонтальній площині з фактографічним записом значень на фізичному носії інформації, який містить заповнений робочою рідиною з вільною поверхнею корпус з немагнітного матеріалу, джерело світла, плаваючий дешифрувальний блок та блоки фоточутливих матриць, розміщених через 90° та з'єднаних з відображуючими та реєструючими величини струму пристроями, який відрізняється тим, що плаваючий дешифруючий блок має кругову багатосекційну діафрагму з світлонепроникних пелюсток, джерело світла оснащене рефлектором та переддіафрагмовим кільцевим віддзеркалювачем, фоточутливі матриці виконані у вигляді блоків та розміщені по колу через 90° відносно нормального напрямку дії динамічних сил прискорення, гальмування, лівого та правого поворотів відносно поздовжньої осі транспортного засобу при його переміщенні по автошляху, при цьому перетворювач містить індивідуальні порожнинні пуансони з денцями, які плавають у серединному рівні об'єму робочої рідини з вільною поверхнею, яка заповнює собою круговий канал розділювача пуансонів, блок сприйняття вертикальних прискорень від нерівностей та вибоїн покриття, який має плаваючий стакан із зворотною пружиною, зовнішня поверхня якого виконана з кільцевим рифленням, двоплечі важелі, пуансони з світлонепроникними пелюстками та без денець, додаткові фоточутливі матриці, що розміщені через 45° у кожному квадранті кола, причому електричні дроти від фоточутливих матриць та живлення джерела світла зібрані в комутаційний блок, до якого під'єднані електричні відображуючі та реєструючі прилади, а також прилади реєстрації величини струму, що відповідає величині сприйнятих динамічних зусиль.
2. Перетворювач за п. 1, який відрізняється тим, що як робоча рідина використана суміш гліцерину зі спиртом, яка має стабільне число кінематичної в'язкості в інтервалі температур від +50°С до - 50°С.
3. Перетворювач за п. 1, який відрізняється тим, що індивідуальна прив'язка координатних осей перетворювача до поздовжньої та поперечної осей транспортного засобу та до осі смуги руху по автошляху виконана за автономною інерційною системою.
4. Перетворювач за п. 1, який відрізняється тим, що відображуючі прилади електричних значень інформації еквівалентної до величини та напряму дії рівнодіючої динамічної сили відносно поздовжньої осі автомобіля по зайнятій смузі руху по автошляху виконані у вигляді аналогових або дискретних світлокольорових та звукових індикаторів, або проекційних чи рідинно-кристалічних, чи цифрових екранів та розміщені у секторі гострого бачення з місця водія транспортного засобу.
Текст
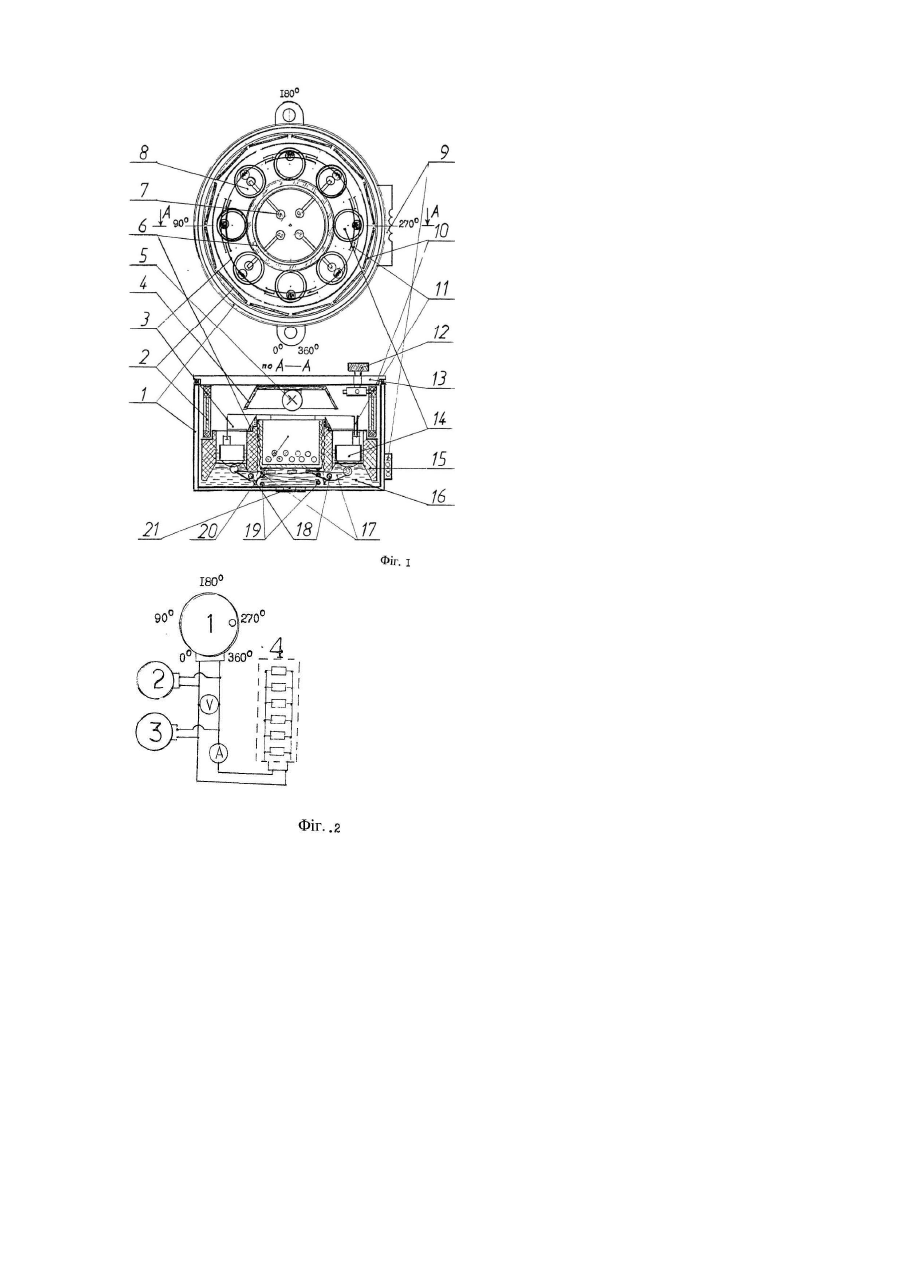
Винахід відноситься до приладів сприйняття динамічних сил та перетворення їх в електричні значення, аналогові по величині та напрямку дії в горизонтальній та вертикальній площинах взаємодії засобу транспорту, наприклад, автомобіля, з поверхнею покриття автошляхів. В процесі свого руху, автомобіль знаходиться у безперервній взаємодії з силами динаміки, що виникають у пятні контакту його коліс з поверхнею автошляху: кочками, вибоїнами, хвилястістю асфальту, закругленнях при зміні напряму руху, на віражах, а також від спротиву сил вітру, дощу, снігу, сил тертя кочення та ін. Ці сили діють на стійкість напряму руху та керованість відносно напряму дороги, що змушує водія безперервними рухами керма утримувати транспортний засіб в межах коридору безпеки на зайнятій смузі руху на автошляхові. При загальній ширині проїзної частини подавляючої кількості автошляхів в 7м, та стандарту ширини транспортного засобу не більше ніж 2,5м. Інтервал безпеки між поздовжніми сторонами зустрічних автомобілів складав всього 2м. Дотримання такого коридору безпеки руху при різній швидкості вимагає від водіїв І різної чутливості та її гостроту перш за все почуття вестибуляції. При цьому необхідно зважати, що гострота поля чутливості вестибулярного апарату людини-водія значно зменшується тим, що велика група рецепторів чутливості, що підсвідомо забезпечують людині чуття свого просторового положення - вертикального - при опорі ногами на землю, з своєї природної дії виключені, бо автомобілем керують в сидячому положенні, де ноги водія виконують механічні функції керування та не мають ніякого відношення до координації просторового відчуття ні водія, ні, тим більше, його автомобіля відносно смуги руху по автошляхові. Вже при швидкості руху 100км/год (28м/сек) - звичній для сучасних моделей авмобілів, інтервал безпеки при зустрічному русі, у випадкові помилки керування одним з водіїв, долається за 0,072сек, тоді як фізіологічна можливість навіть зорового сприйняття інформації складає 0,1сек і більше. В умовах недостатньої видимості зміну свого просторового місцеположення на смузі свого руху водій відчуває тільки при допомозі свого вестибулярного відбуття, гострота реакції котрого не перевищує 0,5-0,8сек. Безсумнівно, що для забезпечення безпечного водіння сучасних високодинамічних автомобілів, тим більше в умовах вузьких автошляхів з зустрічним рухом, природні органи відчуття водіїв необхідно доповнити приладами, швидкодія яких синхронна реальним фізичним процесам взаємодії динамічних сил в контакті пневматичного колеса з покриттям автошляху. У якості прототипу прийнято "Измеритель динамики вождения средств сухопутного транспорта" (патент РФ №2105 №2104511 от 25.04.1995г., авторы: Рахубовский Ю.С., и др.), що має в собі заповнений робочою рідиною немагнітний корпус, освітлювач, плаваючий дешифруючий блок з ввігнутим дзеркалом, блоки фоточутливих матриць з показником струму, та фоточутливу кругову діаграму фактографічного реєстрування рівнодіючих величин гальмування, прискорення, лівого або правого віражів у площині 360° автошляху та поздовжньої осі засобу сухопутного транспорту. Недоліками прототипу б те, що плаваючий дешифруючий блок його сприймав та перетворюй в електричні величини тільки динамічні сили, що діють у горизонтальній площині руху автомобіля, тоді як динамічні сили, що діють також на автомобіль у вертикальній площині від кочок та вибоїн покриття автошляху, його хвилястості, місцин просідання та вичавлення, не визначаються та не враховуються, тоді як ці сили здатні впливати на раптове порушення стійкості те керованості руху автомобіля по зайнятій смузі, та не завжди вчасно їx дія попереджується керуючими діями водія для збереження безпеки руху - інтервалу. Окрім того, вібрація відносно великої поверхні вільної рідини в корпусі прототипу, призводить до такої ж вібрації дешифруючого блоку, а звідси і до "розмиття" та нечіткості границь світлового "зайчика" на поверхні світлочутливої кругової діаграми, що не забезпечуй необхідну точність позиціонування рівнодіючого динамічного вектору сил, що діють в площині 360°, а також точності „іннерціальної” прив'язки поздовжньої осі автомобіля до поздовжньої осі смуги його руху на автошляхові. Ціль винаходу - технічне забезпечення можливості перетворювання в електричні значення, окрім діючих у горизонтальній площині, також і динамічних сил, що діють у вертикальній площині при взаємодії засобу транспорту з покриттям автошляхів від нерівностей їх поверхні,підвищення точності позиціонування рівнодіючого динамічного вектору сил у горизонтальній площині автошляху в межах 360°, а також точності іннерціальної "прив'язки" поздовжньої осі засобу транспорту до поздовжньої осі смуги його руху по автошляхові. Суть винаходу - ця ціль досягається тим, що для підвищення точності позиціонування рівнодіючого (підсумкового) вектору сил відносно поздовжньої осі засобу транспорту, наприклад, автомобіля, при його динамічній взаємодії з поверхнею автошляху в площині 360°, а також у вертикальній площині, плаваючий дешифруючий блок містить у собі кругову багатосекційну діафрагму з світлонепрониклипих пелюсток, а їхні порожнини пуансони з денцями плавають у серединному рівні робочої рідини з вільною поверхнею, що заповнює собою круговий канал кільцевого розділювача пуансонів, джерело світла з рефлектором, переддіафрагмений кільцевий віддзеркалював, блоки фоточутливих матриць, що розміщені по колу 360° через 90° згідно нормального направлення дій динамічних сил прискорення, гальмування, лівого та правого поворотів або віражів, відносно поздовжньої осі автомобіля при його переміщенні по автошляхові, одночасно блок сприйняття вертикальних прискорень від нерівностей покриття автошляхів вміщає у собі плаваючий підпружинений стакан з зовнішнім кільцевим рифленням поверхні, двоплечеві важелі, пуансони з пелюстками світлонепроникаючоії діафрагми та без денець, а також фоточутливі матриці, що розміщені через 45°. У кожному квадранті кола, при цьому електричні дроти від функціональних по своїм напрямкам фоточутливих матриць та живлення джерела світла, зібрані в комунікаційний блок для підключення електричних відображуючих та реєструючих приладів, при чому кількість поступаючої на ці прилади електроенергії підраховується приладами обліку, наприклад, кулонометрами, у якості аналогів динамічних сил, дія яких призводить до зносу деталей та вузлів автомобіля в залежності він категорії та стану поверхні автошляхів. Конструктивно перетворювач складається: (Фіг.1) 1. Корпус з немагнітного матеріалу; 2. Фоточутливі матриці; 3. пелюстки кругової багатосекційної діафрагми плаваючого дешифруючого блоку світлонепроникливі, одинарні; 4. Рефлектор; 5. Джерело світла; 6. Переддіафрагмений кільцевий віддзеркалювач світла; 7. Важелі квадрантних пуансонів; 8. Квадрантні пуансони; 9. Блок електричних відгалужень світлочутливих матриць; 10. Кільцевий блок фоточутливих матриць: 11. Пелюстки кругової діафрагми подвійні; 12. Гвинт точного суміщення (Інерційного) поздовжніх осей перетворювачі автомобіля та смуги руху по автошляхові; 13. Кришка корпусу з ущільнювачем; 14. Пуансони пелюстків діафрагми плаваючі; 15. Розділювач пуансонів плаваючої кільцевої діафрагми; 16. Круговий канал розділювача пуансонів з робочою рідиною; 17. Двоплічні важелі квадрантних пуансонів; 18. Кільцева вісь важелів; 19. Зворотна пружина стакану інерційної маси; 20. Плаваючий стакан інерційної маси сприйняття вертикальних прискорень з зрівноважуючим баластом; 21. Вушко кріплення корпусу перетворювача; Робота перетворювача - Перетворювач закріпляють по лінії поздовжньої осі кузова автомобіля над задньою вісью, або трохи позаду неї, оскільки задня вісь дуже чутлива до зовнішніх сил при взаємодії її коліс з поверхнею автошляху, схильна до заносів та збочень при віражах, а тому найбільше впливає на утримування автомобілем напрямку по смузі руху, заданого водієм. При дії на автомобіль зовнішніх сил збурення від Його пришвидшення, гальмування, відцентрових сил на віражах та закругленнях автошляхів, рівень робочої рідини у каналі розділювача пуансонів 15 відхиляється від свого горизонтального положення, що він займає при рівномірному рухові з установленою швидкістю. При цьому найвищий рівень вільної поверхні робочої piдини, згідно з законом інерції рідкої маси, зосередиться у тому місці кругового каналу 16 в площині 360°, яке відповідає напрямку рівнодіючої всіх динамічних сил, що діють у даний відрізок часу відносно координатних осей автомобіля в горизонтальній площині автошляху. Підвищення рівня вільної поверхні робочої рідини у якомусь з секторів каналу 16, де при спокійному рухові на однаковій - горизонтальній - лінії плавають усі пуансони 14 пелюсткової діафрагми, призводить до винурювання співвідносної групи пуансонів 14 з пелюстками світлонепроникливої діафрагми, що призводить до її відкривання шляхом підняття пелюстків у цьому секторі кільцевого каналу 16, які в непрацюючому положенні (закритому), покояться на горизонтальній площині розділювача 15. Через щілину відкриття пелюстка діафрагми потік світла від джерела 5 та його рефлектора 4, віддзеркалюється переддіафрагменим кільцевим віддзеркалювачем 6 на блок фоточутливих матриць 10 саме у секторі підняття рівня робочої рідини зусиллям рівнодіючої всіх динамічних сил на автомобіль у цей проміжок часу. Збудження від цього потоку світла фоточутливих матриць призведе до виникнення струму, величина котрого буде пропорційна площі освітлення фоточутливих матриць, яка пропорційна висоті підняття пелюстків діафрагми, а відтак - величині динамічних сил, що діють на висоту підняття рівня робочої рідини у каналі 16 перетворювача. Оскільки поздовжні осі кільцевої діафрагми 3 та кільцевого блоку фоточутливих матриць 10 суміщені інерційно з поздовжніми осями автомобіля та смуги його руху по автошляхові, то сектори відкриття пелюстків плаваючої діафрагми у площині 360° будуть одночасно з продукуванням струму визначати напрям дії рівнодіючої всіх динамічних сил відносно поздовжньої осі рухомого автомобіля, що діють у даний відрізок часу на збурення його напрямку по смузі руху, скерованого водієм. Блоки фоточутливих матриць 10 розміщені через 90°, тобто фіксують собою координати поздовжньої та поперечної осей автомобіля у площині 300° та поздовжньої осі смуги його руху по автошляху у часі та просторі у напрямках координат: 0°-90°-180°-270°-360°, та з’єднанні між собою способом збалансованого містка, то стрілка аналогового показуючого приладу з 0 посередині, буде відхилятись від цих координатних значень (сприймаючих приладом щоразу за свій 0) у залежності від напряму рівнодіючої динамічних сил у момент руху. Сприймання перетворювачем динамічних сил, що діють на автомобіль у вертикальній площині при взаємодії його коліс з нерівностями покриття автошляхів, виконує плаваючий стакан 20 - інерційна маса, що зрівноважена у нейтральному положенні зворотною пружиною 19 та власним баластом і спроможне лише при усталеному рухові автомобіля з постійною швидкістю. У такому газі низькочастотні хвилі вільної поверхні робочої рідини у колодязі розділювача пуансоні 15 є концентричними. Дією концентричних хвиль робочої рідини плаваючий стакан-інерційна маса, зовнішня поверхня якого же виступаючі рельєфні кільця, менші по своєму діаметру від діаметру колодязя, приймав строго вертикальне та центральне положення у колодязі розділювача 15, а його поверхневі кільця виходять з таких же ямок-кілець, що виконані у стінках колодязя. При цьому інерційна маса-стакан отримує можливість переміщення у вертикальній площині під впливом динамічних сил, що збурюють усталено-рівномірний рух автомобіля по поверхні автошляху. Різьки удари коліс на вибоїнах або хвилястостях покриття автошляху виводять стакан-масу з усталеної рівноваги, він пересилює зворотну пружину 19 і натискає на двоплічні важелі 7 та 17 квадрантних пуансонів 8, котрі зусиллями важелів піднімаються разом з пелюстками кільцевої діафрагми, чим відкривають для освітлення квадрантні сектори кільцевого блоку фоточутливих матриць 10. Оскільки квадрантні пуансони 8 не мають денець, то вони не реагують на зміну рівня робочої рідини у каналі 16, окрім того, при горизонтальних зміщеннях вільної поверхні робочої рідини у колодязі розділювача 15 стакан 20 відхиляється від свого вертикального положення і його поверхневі кільця входять у впадини стінок колодязя, що додатково блокує інерційну масу-стакан від сприймання динамічних сил, що діють на автомобіль у не вертикальній площині в процесі його руху по автошляхові. Всі квадрантні пуансони одночасно піднімають пелюстки секційних діафрагм, відкриваючи потік світла до блоків фоточутливих матриць своїх квадрантів, що з’єднані між собою електрично. Виникнення струму від збудження фоточутливих матриць також пропорційне площі їх освітлення, яка залежить від висоти підняття пелюсток діафрагми, а відтак - від величини вертикальної сили, сприйнятої інерційною масою-стаканом через колеса та елементи підвіски автомобіля від поверхні автошляху. Ця сила опісля перетворення перетворювачем в електричний струм, фіксується або відображується відомими електроприладами, наприклад, амперметром та ін. Корисність практичного використання перетворювача вбачається у можливості об'єктивних вимірювань фізичними одиницями прискорення або гальмування (в метрах/ceк2), міри опановування водійського вміння при навчанні, екзаменуванні практичного водіння на "права", натомість думко-очних оцінок інструктора по водінню та інспектора ДАЇ, що значною мірою в своїй відповідності залежать від густини "озеленення”. Використання перетворювача дозволить наочно визначати дотримання безпечного рівня у всяк денному водінні автомобілів користувачами з різною професійною майстерністю та фізіологічними здатностями до того, оскільки небезпека спричинення дорожньо-транспортної пригоди виникає не тільки від не знання або порушення Правил дорожнього руху, але й фізичної здатності сприймання небезпечного розвитку процесу керування у часі та просторові, що також думко-очно знаходить своє визначення у Протоколові ДАІ відносно вини того чи Іншого водія у скоєні ДТП: "... водій Н. не впорався з коруванням автомобіля...", тоді як керуючі дії обох водіїв у часі та просторові, перетворені з допомогою перетворювача у електричні значення, будуть можливими по фіксування та об'єктивної оцінки сучасними електронно-обчислювальними, фіксуючими та відображуючими приладами та пристроями. Одночасно з виміром динамічних сил, що збурюють усталений рух по автошляхові та небезпечні навіть для професійного водія своєю раптовістю, можлива об'єктивна оцінка якостей покриття автошляхів та його утримання, безпеки організації руху на них, а також міра впливу якостей автошляхів на темпи зносу деталей та вузлів засобів транспорту. Одна з можливих схем блокування "Перетворювача..." з іншими приладами приведена на фіг.2: 1. - власне перетворювач - інтегратор динамічних сил взаємодії у площинах та координатах руху автомобіля по автошляхові, та перетворення їх у електричні значення прискорення, гальмування, лівому або правому віражах або заносах: 2. - блок відображення біжучої Інформації про напрям та величину імпульсу сили відносно поздовжньої осі автомобіля та смуги його руху по автошляхові при прискореннях, гальмуваннях, лівому або правому віражах та заносах: 3. - блок фактографічної реєстрації значень величин імпульсу взаємодії автомобіля з поверхнею автошляху на фізичному носії Інформації: магнітних або паперових лентах, дисках, з’йомних діаграмах, лазерних дисках та ін.: 4. - блок накопичення Інформації за тривалий час для цілей використання при профілактичних обслуговуваннях, заміні або ремонту вузлів та агрегатів засобів транспорту по фактичних об'ємах сприйнятих ними динамічних зусиль від покриття автошляхів, що спричинилися до їх зносу або виходу з ладу.
ДивитисяДодаткова інформація
Назва патенту англійськоюConverter of vector dynamic forces acting on vehicle wheels from pavement into electric signals (proposed by rakhubovskyi y.s.)
Автори англійськоюRakhubovskyi Yurii Sydorovych
Назва патенту російськоюПреобразователь векторных динамических усилий, воздействующих на колеса автомобиля со стороны дорожного покрытия, в электрические сигналы (предложенный рахубовским ю.с.)
Автори російськоюРахубовский Юрий Сидорович
МПК / Мітки
МПК: G01M 17/00
Мітки: динамічних, взаємодії, транспортного, рахубовського, величини, засобу, покриттям, автошляхів, електричні, пневмоколіс, перетворювач, векторів
Код посилання
<a href="https://ua.patents.su/4-72334-peretvoryuvach-dinamichnikh-vektoriv-vzaehmodi-pnevmokolis-transportnogo-zasobu-z-pokrittyam-avtoshlyakhiv-u-elektrichni-velichini-peretvoryuvach-rakhubovskogo.html" target="_blank" rel="follow" title="База патентів України">Перетворювач динамічних векторів взаємодії пневмоколіс транспортного засобу з покриттям автошляхів у електричні величини (перетворювач рахубовського)</a>
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Козлинський Мирослав Петрович, Мальнов Сергій Іванович, Денис Василь Володимирович, Плешкановський Олег Валентинович
МПК: B60C 23/00
Мітки: положення, ваги, транспортного, здійснення, пристрій, колісного, спосіб, визначення, засобу, центра
Формула / Реферат:
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Багатоканальний перетворювач аналогової величини в код
Номер патенту: 49327
Опубліковано: 16.09.2002
Автор: Ніколенко Сергій Іванович
МПК: H03K 19/00
Мітки: багатоканальний, величини, код, аналогової, перетворювач
Формула / Реферат:
Багатоканальний перетворювач аналогової величини в код, що містить джерела інформації, підключені через комутатор до першого входу блока перетворення аналогової величини в код, вихід якого підключений до блока пам'яті, блок керування, один вихід якого підключений до керуючих входів комутатора і блока пам'яті, а другий вихід - до другого входу блока перетворення аналогової величини в код, який відрізняється тим, що вихід блока пам'яті...
Перетворювач неелектричної величини в електричний сигнал
Номер патенту: 9776
Опубліковано: 30.09.1996
Автори: Кучугура Володимир Миколайович, Михайлов Ігор Володимирович, Почтарьов Євген Васильович, Кіберєв Юрій Олександрович, Посошко Віктор Миколайович
МПК: G01L 9/04
Мітки: сигнал, величини, електричний, перетворювач, неелектрично
Формула / Реферат:
(57) Преобразователь неэлектрической величины в электрический сигнал, содержащий управляемый источник питания, регулируемые делители, тензомост и масштабирующий блок, отличающийся тем, что он снабжен корректором "нуля", сумматором-корректором "нуля", аттенюатором, сумматором температурной коррекции, сумматором-корректором источника питания и источником опорных напряжений, причем первая вершина измерительной диагонали...
Спосіб зменшення осліпленості водія світлом фар зустрічного транспортного засобу
Номер патенту: 20100
Опубліковано: 25.12.1997
Автор: Ковалишин Богдан Михайлович
МПК: F21S 8/10
Мітки: зустрічного, транспортного, світлом, зменшення, спосіб, осліпленості, водія, фар, засобу
Формула / Реферат:
Спосіб зменшення осліпленості водія світлом фар зустрічного транспортного засобу, що включає зменшення контрастності між освітленням смуг зустрічного і попутного руху шляхом використання додаткового джерела освітлення, який відрізняється тим, що контрастність між освітленням смуг зустрічного і попутного руху транспорту зменшують шляхом освітлення смуги зустрічного руху додатковим джерелом, встановленим в задній частині кожного транспортного...
Перетворювач неелектричної величини в електричний сигнал
Номер патенту: 27429
Опубліковано: 15.09.2000
Автори: Посошко Віктор Миколайович, Кучугура Володимир Миколайович, Михайлов Ігор Володимирович, Почтарьов Євген Васильович
МПК: G06F 7/00, H03K 5/00, G01L 9/02
Мітки: сигнал, неелектрично, величини, електричний, перетворювач
Текст:
...источника питания и источник опорных напряжений, а также связи между ними [1] Недостатком этого устройства является то, чга по точности измерения и способу построения схемы на сумматорах оно не решает задачу точного измерения выходных параметров тензомоста при разнесенных конструктивно блага* тензомоста и измерительных схем в связи с тем, что в нем тензомост использовался для корректировки погрешности схемы по температуре и для этого он...
Попередній патент: Форма(r)-n-[5-метил-8-(4-метилпіперазин-1-іл)-1,2,3,4,-тетрагідро-2-нафтил]-4-морфолінобензаміду
Наступний патент: Пристрій для видобутку рідини зі свердловини
Випадковий патент: Спосіб визначення фальсифікації меду