Аеродинамічний підйомно-тягнучий рушій
Номер патенту: 74512
Опубліковано: 15.12.2005
Автори: Акаро Андрєй Ігорєвіч, Зєлінскій Анатолій Міхайловіч, Дєнісов Анатолій Алєксєєвіч, Мєдвєдєв Міхаіл Міхайловіч

Формула / Реферат
1. Аеродинамічний підйомно-тягнучий рушій, що складається з аеродинамічних поверхонь, який відрізняється тим, що має раму з віссю, відносно якої рама встановлена з можливістю обертання, принаймні дві аеродинамічні поверхні, кожна з яких закріплена на карданному шарнірі з можливістю коливань синхронно з обертанням рами, карданний шарнір прикріплений до стрижня, який встановлений на рамі, осі хрестовини карданного шарніра взаємно перпендикулярні й перебувають відповідно у двох взаємно перпендикулярних площинах, що перетинаються по осі стрижня, причому одна з них проходить через вісь обертання рами й вісь стрижня, стрижень встановлений паралельно осі рами, вісь рами з'єднана з кожною аеродинамічною поверхнею механічною передачею з можливістю забезпечення обертання аеродинамічної поверхні синхронно й зворотно обертанню рами.
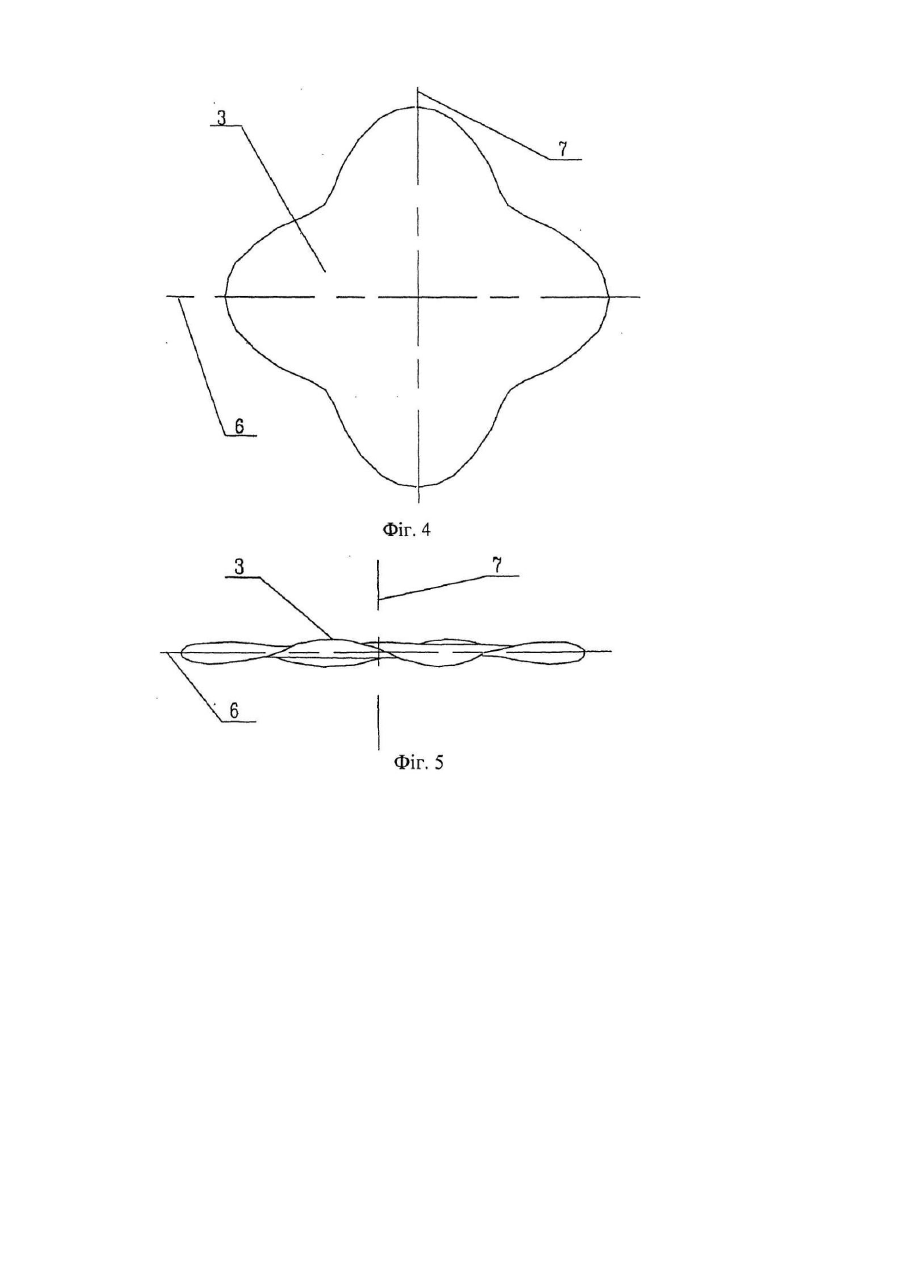
2. Рушій за п. 1, який відрізняється тим, що кожна аеродинамічна поверхня закручена відносно осей, паралельних осям хрестовини й таких, що проходять через аеродинамічну поверхню.
Текст
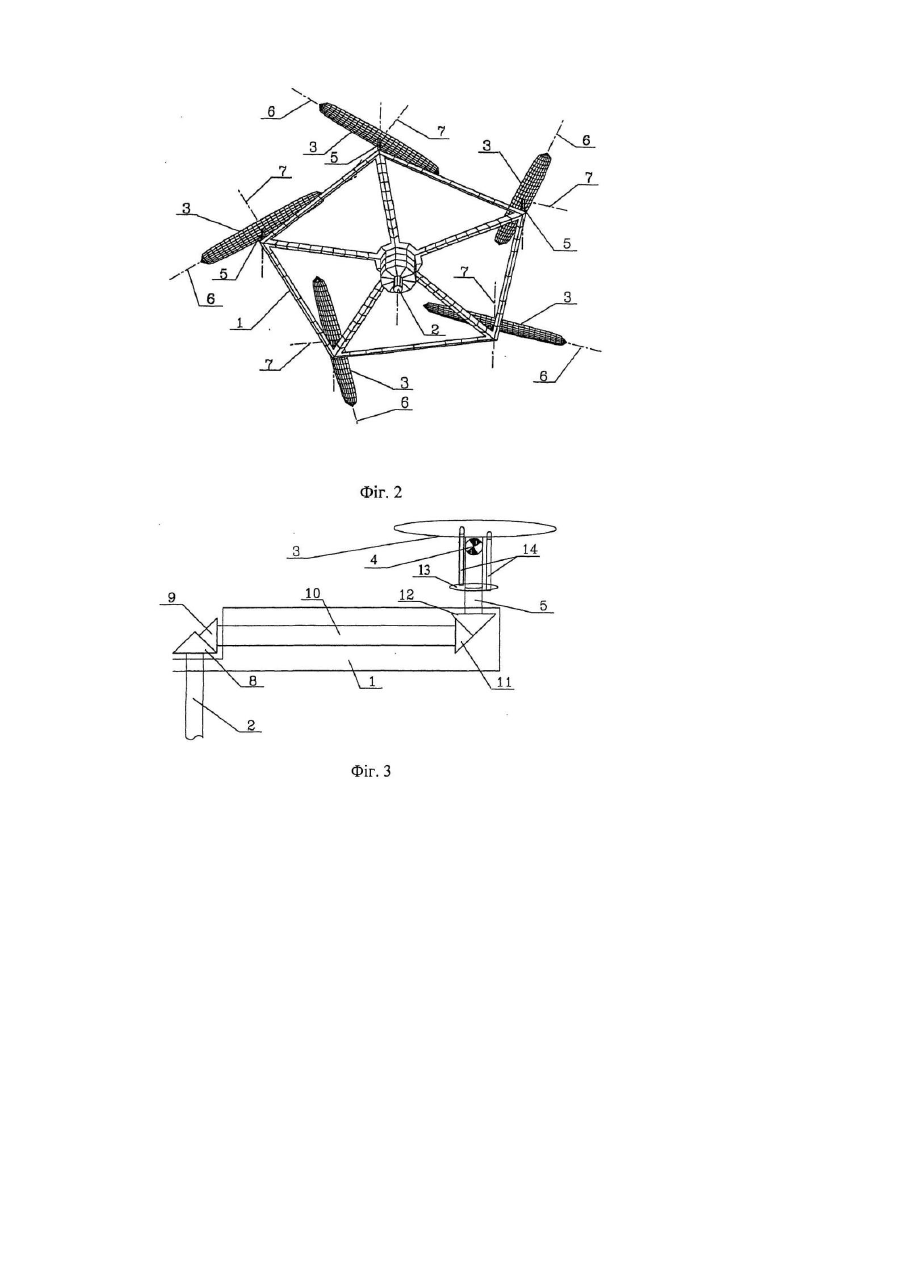
Винахід відноситься до аеродинаміки літальних апаратів і являє собою аеродинамічний підйомно-тягнучий рушій, встановлюваний на літальному апараті для створення підйомної сили й тяги. Відомий обертовий несучий гвинт вертольота, що створює підйомну силу та тягу (А.М. Володко «Вертоліт - трудівник і воїн», М, изд. ДОС ААФ, 1984, с.82). Відомі лопаті несучого гвинта вертольота, що створюють при їхньому обертанні підйомну силу та силу тяги при польоті вертольота (У. Джонсон «Теорія вертольота», кн. 1, М, «Мир», 1983, с. 17). Недоліком відомих несучих гвинтів вертольота є низька ефективність створення підйомної сили, внаслідок чого для одержання прийнятних величин підйомної сили до них необхідно підводити значну потужність. При обертанні лопатей несучого гвинта, перетини лопатей мають різну швидкість відносно повітря тим меншу, чим менше радіуси окружностей, описуваних цими перетинами. У результаті поверхневий розподіл аеродинамічної сили на лопаті виявляється нерівномірним ( близьким до квадратичного), що істотно знижує ефективність створення підйомної сили. В основу винаходу поставлене завдання створення аеродинамічного підйомно-тягнучого рушія, у якому забезпечується близький до рівномірного розподіл аеродинамічних сил по аеродинамічних поверхнях, що приводить до високої ефективності створення як підйомної сили, так і горизонтальної тяги. Завдання створення аеродинамічного підйомно-тягнучого рушія вирішується тим, що аеродинамічний підйомно-тягнучий рушій складається з рами з віссю, відносно якої рама встановлена з можливістю обертання, принаймні двох аеродинамічних поверхонь, кожна з яких закріплена на карданному шарнірі з можливістю коливань синхронно з обертанням рами, карданний шарнір прикріплений до стрижня, встановленого на рамі, осі хрестовини карданного шарніра взаємно перпендикулярні та перебувають відповідно у двох взаємно перпендикулярних площинах, що перетинаються по осі стрижня, причому одна з них проходить через вісь обертання рами й вісь стрижня, стрижень встановлений паралельно осі рами, вісь рами з'єднана з кожною аеродинамічною поверхнею механічною передачею, що забезпечує можливість обертання аеродинамічної поверхні синхронно та зворотньо обертанню рами. Наявність рами з віссю, відносно якої рама встановлена з можливістю обертання, принаймні двох аеродинамічних поверхонь, кожна з яких закріплена на карданному шарнірі з можливістю коливань синхронно з обертанням рами, прикріплення карданного шарніра до стрижня, встановленого на рамі, так що осі хрестовини карданного шарніра взаємно перпендикулярні та перебувають відповідно у двох взаємно перпендикулярних площинах, що перетинаються по осі стрижня, причому одна з них проходить через вісь обертання й вісь стрижня, установка стрижня паралельно осі рами, з'єднання осі рами з кожною аеродинамічною поверхнею механічною передачею, що забезпечує можливість обертання аеродинамічної поверхні синхронно й зворотньо обертанню рами, забезпечують обертання кожної аеродинамічної поверхні синхронно з рухом по окружності в протилежну йому сторону відносно стрижня з кутовою, швидкістю, рівною кутовій швидкості руху по окружності, що створює поступальний ( без обертання ) рух аеродинамічної поверхні відносно повітря та забезпечує рівномірний розподіл аеродинамічних сил по аеродинамічній поверхні, що призводить до високої ефективності підйомної сили. Здійснення коливань кожною аеродинамічною поверхнею синхронно з їхнім обертанням відносно осей хрестовини карданного шарніра забезпечує одночасно зі створенням підйомної сили і створення горизонтальної тяги. В аеродинамічному підйомно-тягнучому рушії кожна аеродинамічна поверхня може бути закручена відносно осей .паралельних осям хрестовини карданного шарніра та таких ,що проходять через аеродинамічну поверхню, що приводить до створення моменту, сприяючому коливанням аеродинамічної поверхні й забезпечує зменшення зусиль, затрачуваних на її коливання й тим самим знижує потужність прикладену для коливань, і збільшує е фективність створення підйомної сили та тяги. Кількість аеродинамічних поверхонь вибирається експериментально-розрахунковим методом з умови створення необхідної піднімальної сили. На мал. 1 зображений вид зверху аеродинамічного підйомно-тягнучого рушія; на мал. 2 - вид знизу аеродинамічного підйомно-тягнучого рушія; на мал. З - схема механічної передачі аеродинамічної поверхні, що забезпечує обертання; на мал. 4 - вид зверху на закрученуаеродинамічну поверхню; на мал. 5 - вид збоку на закручену аеродинамічну поверхню. Аеродинамічний підйомно-тягнучий рушій містить раму 1 з віссю 2, відносно якої рама 1 установлена з можливістю обертання. Привод обертання рами 1 відносно осі 2 ( на кресленні не показаний ) може бути виконаний у вигляді двигуна, встановленого на осі 2, на валу якого закріплена зірочка, а на рамі 1 на іншої прикріпленій до неї осі закріплена друга зірочка, обидві зірочки з'єднані приводним ланцюгом. Є принаймні дві аеродинамічні поверхні 3, кожна з яких закріплена на карданному шарнірі 4 (мал. 3) з можливістю коливань синхронно з обертанням рами 1. Карданний шарнір 4, прикріплений до стрижня, 5 установленого на рамі 1, стрижень 5 установлений паралельно осі 2. Осі 6 й 7 хрестовини карданного шарніра 4 взаємно перпендикулярні та перебувають відповідно у двох взаємно перпендикулярних площинах, що перетинаються по осі стрижня 5, причому одна з них проходить через вісь 2 обертання й вісь стержня 5. Вісь 2 з'єднана з кожною аеродинамічною поверхнею 3 механічною передачею, встановленою на рамі 1 і такою, що забезпечує можливість обертання аеродинамічної поверхні 3 разом зі стрижнем 5 синхронно й зворотно обертанню рами 1. На осі 2 закріплене конічне зубчасте колесо 8, з яким знаходиться в зачепленні друге конічне зубчасте колесо 9, закріплене на кінці радіального вала 10, встановленого на рамі 1. На іншому кінці радіального вала 10 закріплене конічне зубчасте колесо 11, яке перебуває в зачепленні з конічним зубчастим колесом 12, закріпленим на кінці стрижня 5. Конічні зубчасті колеса 8, 9, і також 11,12 однакові. Коливання аеродинамічних поверхонь 3 здійснюються механічним копіювальним механізмом, що складається із профільованого диска 13, закріпленого на стержні 5, на якому встановлена аеродинамічна поверхня 3 на карданному шарнірі 4. По профільованому диску 13 ковзають вертикальні штоки-штовхачі 14, взаємодіючі з аеродинамічною поверхнею 3. Кожна аеродинамічна поверхня 3 може бути закручена відносно осей, паралельних осям 6 й 7 хрестовини карданного шарніра 4 і таких ,що проходять через аеродинамічну поверхню 3, що приводить до створення моменту, сприяючого коливанням аеродинамічної поверхні 3 і забезпечує зменшення зусиль, затрачуваних на її коливання й тим самим знижує потужність прикладену для коливань . Рушій працює в такий спосіб. Рама 1 разом з аеродинамічними поверхнями 3 обертається відносно осі 2 за допомогою привода обертання рами 1 із зірочками й приводним ланцюгом. Одночасно кожна аеродинамічна поверхня 3 разом з обертанням рами 1 рухається по окружності навколо осі 2 і синхронно з рухом по окружності обертається разом зі стиржнем 5 в сторону, протилежну обертанню рами 1 з кутовою швидкістю, яка рівна кутовій швидкості руху по окружності, за допомогою механічної передачі. Оскільки аеродинамічні поверхні 3 рухаються поступально, створювана підйомна сила розподілена на них рівномірно, що і забезпечує високу енергетичну ефективність рушія. При обертанні рами 1 вал 10 разом з рамою 1 рухається по окружності, при цьому конічне зубчасте колесо 9 перекочується по конічному зубчастому колесу 8 й обертання передається через конічні зубчасті колеса 11 й 12 на стрижень 5 ,обертаючий аеродинамічну поверхню 3 синхронно обертанню рами 1 у протилежну сторону. Цим досягається поступальний без обертання рух аеродинамічних поверхонь З навколо осі 2. Кожна аеродинамічна поверхня 3 робить синхронно з обертанням коливання відносно двох взаємно перпендикулярних осей 6 й 7 хрестовини карданного шарніра 4 перпендикулярно осі 2 обертання рами 1 за рахунок обертання стрижня 5 і профільованого диска 13, по якому ковзають вертикальні штоки-штовхачі 14 і коливають аеродинамічні поверхні 3 на певні кути, забезпечуючи створення горизонтальної тяги одночасно зі створенням підйомної сили, причому розподіл аеродинамічної сили на аеродинамічних поверхнях 3 залишається рівномірним. Запропонований аеродинамічний підйомно-тягнучий рушій дозволяє здійснити політ літального апарата з високою енергетичною ефективністю.
ДивитисяДодаткова інформація
Назва патенту англійськоюAerodynamic lifting-thrusting propulsion device
Назва патенту російськоюАэродинамический подъемно-тянущий движитель
МПК / Мітки
МПК: B64C 39/08
Мітки: аеродинамічний, підйомно-тягнучий, рушій
Код посилання
<a href="https://ua.patents.su/4-74512-aerodinamichnijj-pidjjomno-tyagnuchijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Аеродинамічний підйомно-тягнучий рушій</a>
Підйомно-поворотні ворота

Номер патенту: 27094
Опубліковано: 28.02.2000
Автори: Дудник Іван Володимирович, Пелах Юрій Ісаакович
МПК: E06B 11/00
Мітки: ворота, підйомно-поворотні
Формула / Реферат:
1. Підйомно-поворотні ворота, що містять раму, стулку, обладнану встановленими на осях роликами, розміщеними у вертикальних напрямних стояків рами, противаги, гнучкими зв'язками з'єднані зі стулкою, і привід на відкривання та закривання стулки, які відрізняються тим, що у верхній частині стулки встановлені два кронштейни, кожен з яких несе вісь з роликом, рухомо розміщеним у горизонтальних напрямних, а гнучкі зв'язки виконані у вигляді...
Підйомно-рушійний пристрій
Номер патенту: 69310
Опубліковано: 16.08.2004
Автор: Богачьова Тетяна Борисівна
МПК: F02B 61/00, B60V 1/00
Мітки: підйомно-рушійний, пристрій
Формула / Реферат:
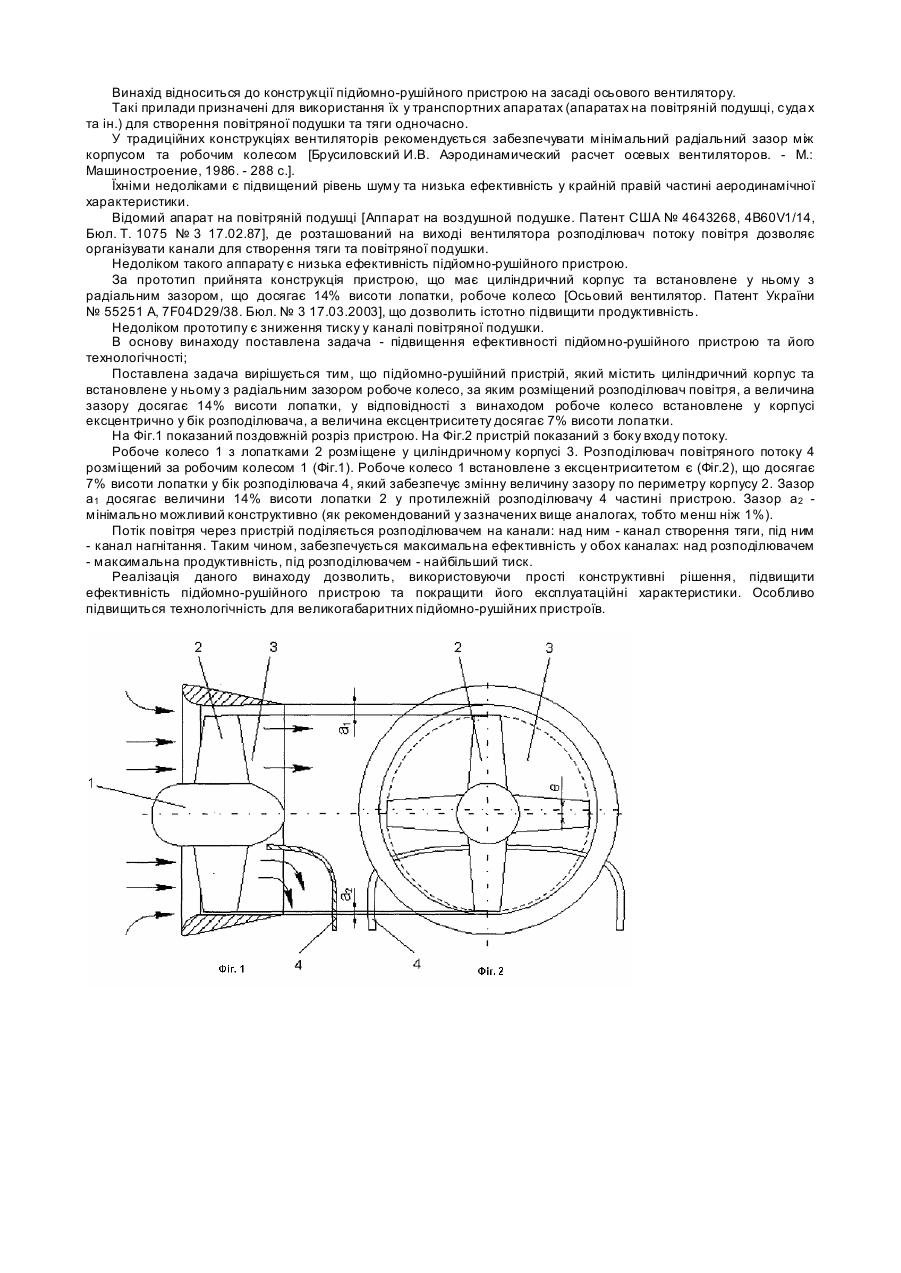
Підйомно-рушійний пристрій, що містить циліндричний корпус та встановлене у ньому з радіальним зазором робоче колесо, за яким розміщений розподільник потоку повітря, а величина зазору досягає 14 % висоти лопатки, який відрізняється тим, що робоче колесо встановлено у корпусі ексцентрично у бік розподільника, а розмір ексцентриситету досягає 7 % висоти лопатки.
Підйомно-поворотні ворота
Номер патенту: 48264
Опубліковано: 15.08.2002
Автор: Остапенко Олексій Васильович
МПК: E05F 15/10, E06B 11/00
Мітки: ворота, підйомно-поворотні
Формула / Реферат:
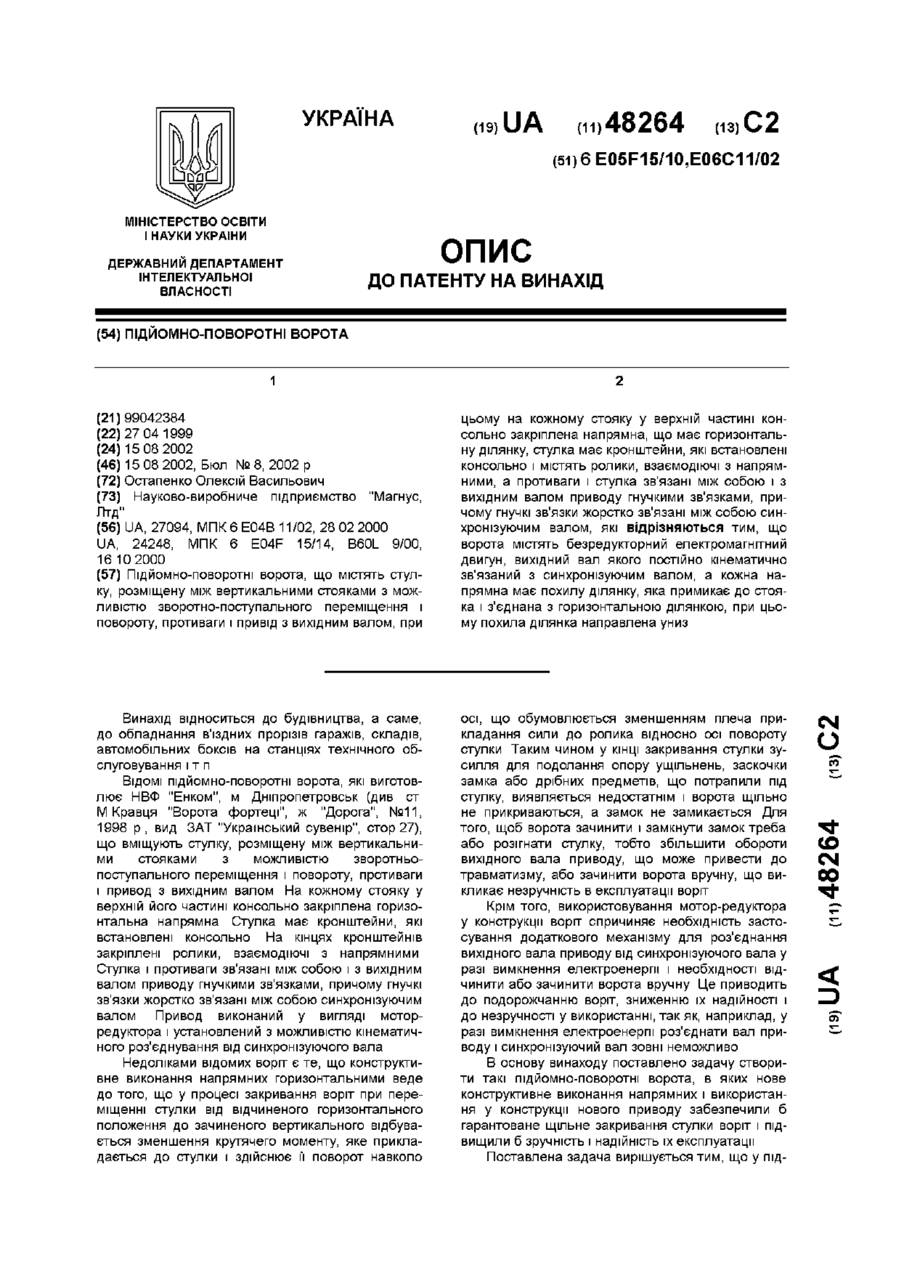
Підйомно-поворотні ворота, що містять стулку, розміщену між вертикальними стояками з можливістю зворотно-поступального переміщення і повороту, противаги і привід з вихідним валом, при цьому на кожному стояку у верхній частині консольно закріплена напрямна, що має горизонтальну ділянку, стулка має кронштейни, які встановлені консольно і містять ролики, взаємодіючі з напрямними, а противаги і стулка зв'язані між собою і з вихідним валом приводу...
Виносна опора підйомно-транспортного засобу

Номер патенту: 496
Опубліковано: 28.02.2000
Автори: Анохін Юрій Олександрович, Карпов Володимир Петрович, Омельченко Володимир Іванович, Комаров Олександр Федорович
МПК: B66C 23/78
Мітки: виносна, опора, засобу, підйомно-транспортного
Формула / Реферат:
Виносна опора підйомно-транспортного засобу, що містить відкидний башмак, шарнірно сполучений з рамою підйомно-транспортного засобу, п'яту з опорною поверхнею, шарнірно закріплену на відкидному башмаку, тягу, один кінець якої шарнірно сполучений з п'ятою, а другий сполучений з рамою підйомно-транспортного засобу, яка відрізняється тим, що опорна поверхня п'яти виконана криволінійною з можливістю перекочування п'яти при вивішуванні...
Роторно-гвинтовий рушій

Номер патенту: 12583
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
МПК: B64C 11/00, F01C 1/00
Мітки: рушій, роторно-гвинтовий
Формула / Реферат:
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Попередній патент: Електродуговий вібратор рідкого металу
Наступний патент: Спосіб створення піднімальної сили і горизонтальної тяги
Випадковий патент: Пристрій охолодження силової установки транспортного засобу