Спосіб роботи резонансної шахтної підйомної установки
Номер патенту: 74621
Опубліковано: 16.01.2006
Автори: Пристром Володимир Адольфович, Грядущий Борис Абрамович, Кърцелин Евтим Руйгов, Дворников Михайло Володимирович, Дворников Володимир Іванович


Формула / Реферат
Спосіб роботи шахтної підйомної установки, що забезпечує регулювання електропривода, який приводить в дію підйомну машину, головні канати, зрівноважувальні канати та інші рухомі елементи, в тому числі підвісні посудини - скіп або кліть, який відрізняється тим, що різниця погонних мас, відповідно зрівноважувальних ![]() і головних
і головних ![]() канатів, сумарних для багатоканатного підйому, повинна задовольняти умову:
канатів, сумарних для багатоканатного підйому, повинна задовольняти умову:
 ,
,
де ![]() - приведена до кола навивання канатів маса всіх рухомих елементів установки, кг;
- приведена до кола навивання канатів маса всіх рухомих елементів установки, кг;
![]() - прискорення вільного падіння, м/с2;
- прискорення вільного падіння, м/с2;
![]() - тривалість руху машини з моменту пуску двигуна до повної зупинки скіпа в розвантаженні, обумовлена необхідною продуктивністю підйомної установки, с,
- тривалість руху машини з моменту пуску двигуна до повної зупинки скіпа в розвантаженні, обумовлена необхідною продуктивністю підйомної установки, с,
 ,
,
де ![]() - тривалість роботи підйому протягом доби, час;
- тривалість роботи підйому протягом доби, час;
![]() - коефіцієнт нерівномірності роботи;
- коефіцієнт нерівномірності роботи;
![]() - добовий обсяг видачі гірської маси, m;
- добовий обсяг видачі гірської маси, m;
![]() - пауза на завантажувально-розвантажувальні операції, с;
- пауза на завантажувально-розвантажувальні операції, с;
![]() - незрівноважена маса, що піднімається,
- незрівноважена маса, що піднімається,
і при цьому система регулювання електропривода задає швидкість руху ![]() за законом, що забезпечує резонансний підйом,
за законом, що забезпечує резонансний підйом,
![]() ,
,
де ![]() - висота підйому, м;
- висота підйому, м;
![]() - поточний час, с;
- поточний час, с;
![]() - циклічна частота резонансного підйому, рад/с, що обумовлена формулою
- циклічна частота резонансного підйому, рад/с, що обумовлена формулою
![]() .
.
Текст
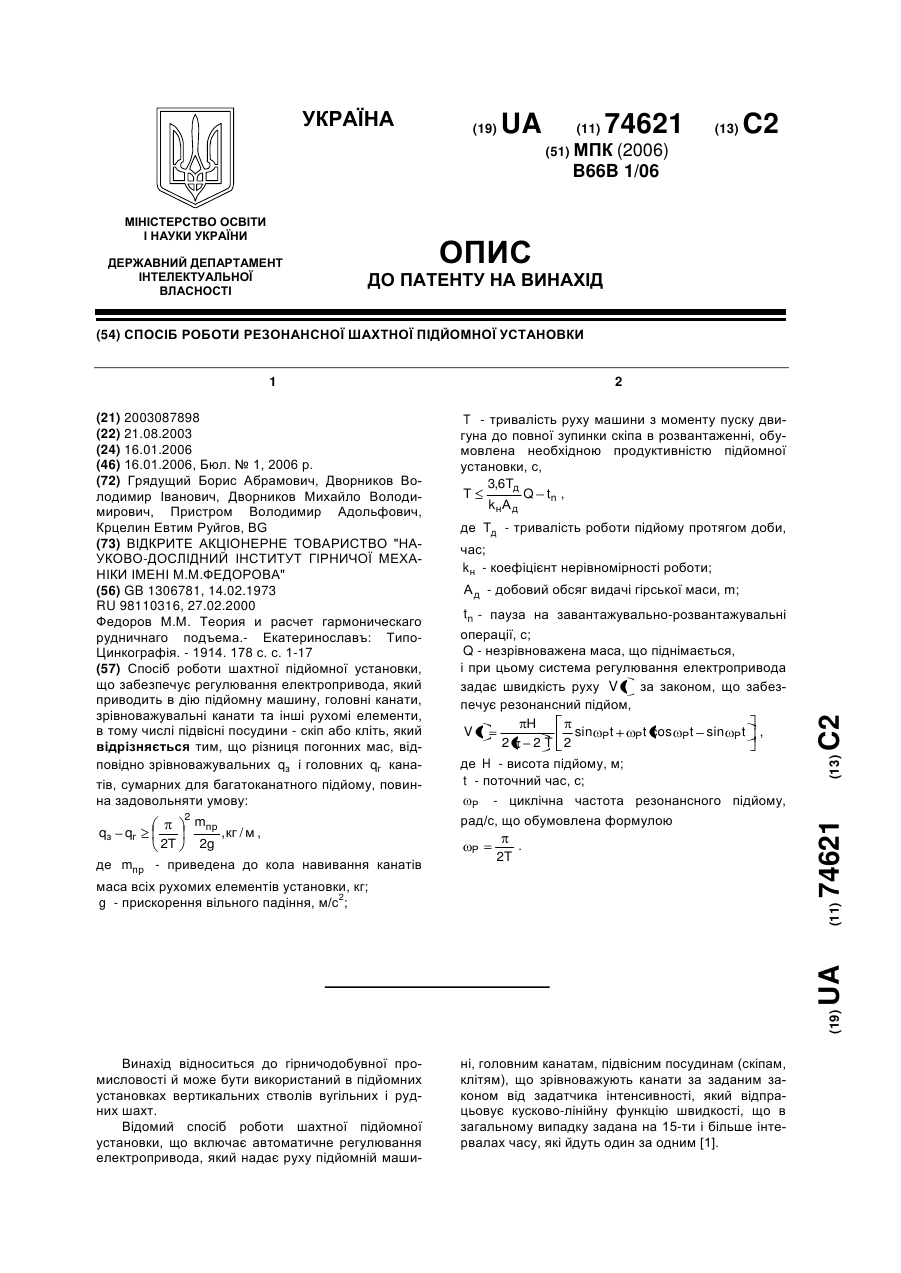
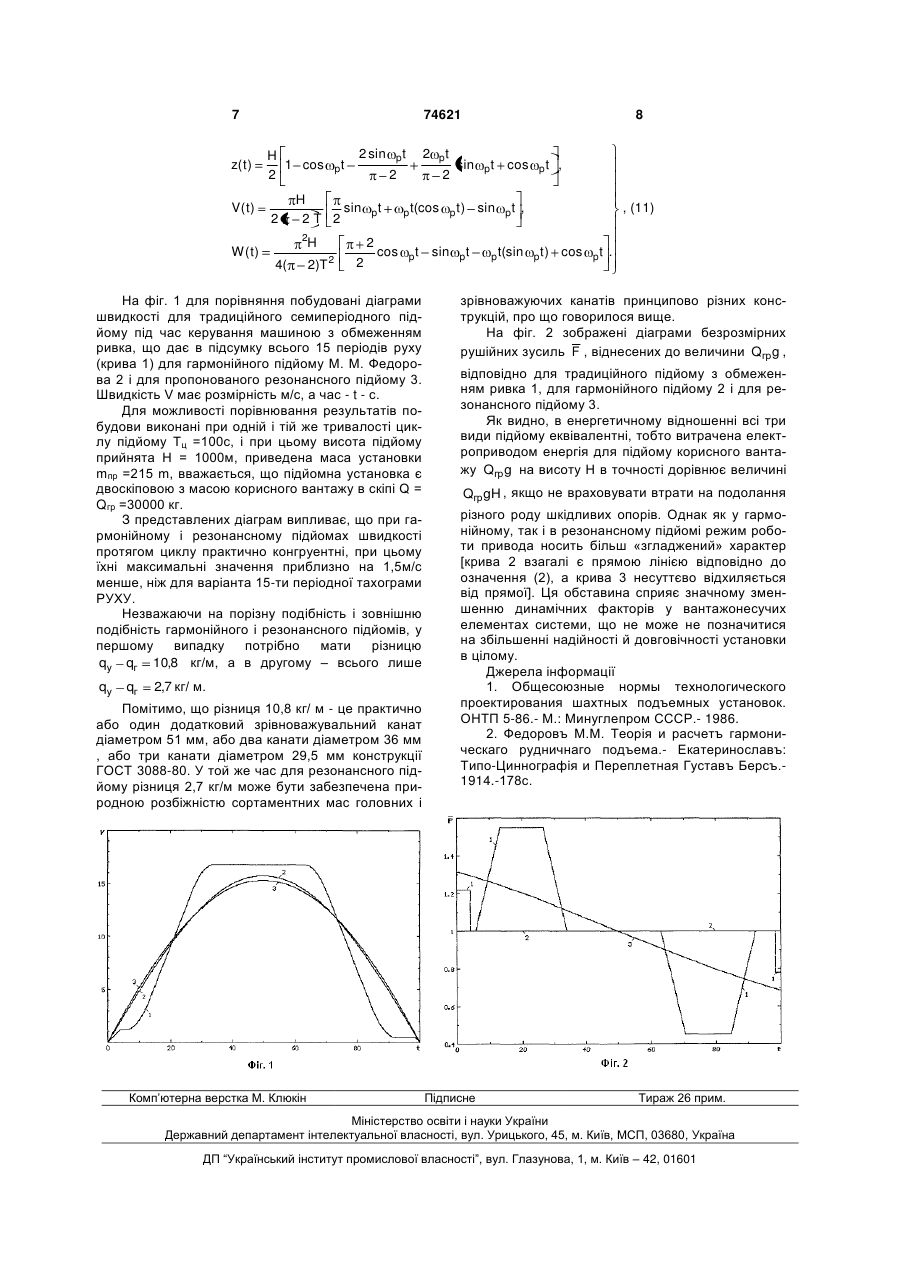
Спосіб роботи шахтної підйомної установки, що забезпечує регулювання електропривода, який приводить в дію підйомну машину, головні канати, зрівноважувальні канати та інші рухомі елементи, в тому числі підвісні посудини - скіп або кліть, який відрізняється тим, що різниця погонних мас, відповідно зрівноважувальних qз і головних qг канатів, сумарних для багатоканатного підйому, повинна задовольняти умову: 2 Винахід відноситься до гірничодобувної промисловості й може бути використаний в підйомних установках вертикальних стволів вугільних і рудних шахт. Відомий спосіб роботи шахтної підйомної установки, що включає автоматичне регулювання електропривода, який надає руху підйомній маши ні, головним канатам, підвісним посудинам (скіпам, клітям), що зрівноважують канати за заданим законом від задатчика інтенсивності, який відпрацьовує кусково-лінійну функцію швидкості, що в загальному випадку задана на 15-ти і більше інтервалах часу, які йдуть один за одним [1]. 3 74621 Недоліками такого способу роботи установки є: - складність системи підпорядкованого регулювання приводом з обмеженням ривка, що реалізує кусково-безперервну діаграму швидкості, що складається з п'ятнадцяти і більше відрізків, контрольованих задатчиком інтенсивності, що не може не відбиватися на надійності апаратної частини системи регулювання; - необхідність обладнання підйомної машини додатковими пристроями контролю, захисту і т.д., які встановлюються в шахтному стволі для забезпечення необхідної точності відпрацювання задатчиком інтенсивності й апаратурою обмежувача швидкості розрахункових часових інтервалів, що також знижує надійність системи в цілому; - принципова неможливість усунення навіть під час керування з обмеженням ривка підвищеної динамічної активності системи «посудини-канатимашина» у перехідних режимах при відпрацюванні системою регулювання кожного наступного інтервалу руху, що негативно позначається на довговічності машини, елементів трансмісії, канатів, підвісних пристроїв й ін. Найбільш близьким до об'єкта, що заявляється й обраний як прототип, є спосіб роботи шахтної підйомної установки (гармонійний підйом), за допомогою якого можлива видача корисних копалин у вертикальному стволі [2]. Відомий спосіб передбачає регулювання електропривода, що надає руху підйомній машині, головним канатам, підвісним посудинам (скіпам, клітям), які зрівноважують канати за заданим законом від задатчика інтенсивності, що відпрацьовує кусково-лінійну функцію швидкості в залежності від часу з обмеженням ривка . Спосіб передбачає роботу шахтної підйомної установки за принципом гармонійного підйому, що відомий у теоретичних аспектах, але не реалізований на практиці. Ідея гармонійного способу підйому полягає в тому, що якщо в рівнянні динаміки підйому mпр d2z 2 g(qy qг ) H 2z Fдв Qg (1) dt прийняти рушійне зусилля, що розвивається приводом установки, постійним Fдв Qg , (2) то при qу > qг рівняння (1) допускає формальні рішення H (1 cos Г t ), 2 dz H V( t ) sin Г t, dt 2T z( t ) d2z 2 (3) H cos t, dt 2T 2 які задовольняють природні й необхідні граничні умови dz(0) dz(T ) z(0) 0, 0, z(T ) H, 0 (4) dt dt при W(t) 2 4 Г 2g ( qy mпр qг ) Т (5) У (1)-(5) використані наступні позначення: z( t ) - координата навантаженої посудини, відлічувана від його крайнього нижнього положення в стволі, або координата порожньої посудини, відлічувана від його крайнього верхнього положення в стволі, м, V( t ) і W ( t ) - поточна швидкість і прискорення посудин; mпр - приведена до окружності навивання канатів маса всіх елементів установки, що рухаються, кг, Н - висота підйому, м; qу і qг - погонні маси відповідно зрівноважувальних і головних канатів, кг/м (сумарні для багатоканатного підйому); Q Qгрn / 2 - незрівноважена маса, що піднімається (n=1 при наявності противаги, n = 2 - для двоскіповіих підйомів, Qгр - маса корисного вантажу в скіпі, що піднімається, кг ); Fдв - рушійне зусилля, що розвивається приводом установки, Н; g - прискорення вільного падіння, м/с2; Г — циклічна частота гармонійного підйому, рад/с; Т — тривалість руху машини з моменту пуску двигуна до повної зупинки скіпа в розвантаженні (тривалість циклу), с; t — поточний час, с. Співвідношення (5) для циклічної частоти а накладає жорсткі вимоги на величину різниці qy qг при заданій величині T, що визначається необхідною продуктивністю підйомної установки: 3.6Tc T Q tn (6) kHAc де Tc - тривалість роботи підйому протягом доби, час; k н - коефіцієнт нерівномірності роботи (звичайно приймається k н =1,5); А с - добовий обсяг видачі гірської маси, т; пауза на завантажувальнорозвантажувальні операції, с. Аналіз співвідношень (6) і (5) показує, що для реалізації гармонійного підйому потрібна досить велика незрівноваженість системи, при якій різниця qy qг складає біля 10кг/м, що вимагає навіtn шення додатково двох-трьох зрівноважувальних канатів. І ця обставина, очевидно, була однією з причин відсутності зараз підйомних установок такого типу, хоча переваги гармонійного підйому очевидні, і такого роду підйом практично позбавлений тих недоліків існуючих установок, які зазначалися вище. Вимогу (6) з урахуванням (5) насправді важко забезпечити, особливо для діючих установок, як 5 74621 6 що намагатися перевести їх до роботи в режимі де T - тривалість руху машини з моменту пусгармонійного підйому. Дійсно, значне збільшення ку двигуна до повної зупинки скіпа в розвантаженні маси зрівноважувальних канатів неминуче викли(с), обумовлена необхідною продуктивністю підкає збільшення діаметра головних канатів для зайомної установки безпечення їхнього необхідного запасу міцності, а 3.6Tc T Q tn це може бути принципово нездійсненним через kHAc порушення вимоги до мінімально припустимого При цьому система підпорядкованого регулювідношення D/d (D - діаметр барабана машини, d вання, до якої входять регулятори струму якоря і діаметр каната). Більш того, збільшення масивношвидкості машини, відпрацьовує задатчиком інтесті підйомної установки може виявитися неприпуснсивності задану швидкість руху V(t ) відмінно від тимим через обмежену перевантажувальну здат(3) за законом ність привода або в результаті перевищення припустимого крутного моменту редуктора, що H V( t ) sin p t p t(cos p t sin p t ) . викликає необхідність заміни електродвигуна або 2 2T 2 редуктора. В основі даного винаходу, що усуває недоліки В основу винаходу поставлена задача здійсіснуючих систем підйому і гармонійного підйому М. нення способу роботи шахтної підйомної установМ. Федорова, лежить ідея створення такого спосоки як резонансної за умови, що різниця погонних бу керування приводом, при якому зі збереженням мас відповідно зрівноважувальних qy і головних усіх переваг гармонійного підйому вимога до різqг канатів (сумарних для багатоканатного підйониці qy qг була б реальною і практично здійсму) повинна на відміну від (5) задовольняти умові ненною. 2 Для значного зменшення різниці qy qг необmпр qy qг , кг / м , (7) хідно і достатньо змусити привід працювати в ре2T 2g зонансному режимі, тобто рушійне зусилля Fдв в де m - приведена до окружності навивання пр канатів маса всіх елементів установки, що рухаються, кг ; g - прискорення вільного падіння, м/с2; T - тривалість руху машини з моменту пуску двигуна до повної зупинки скіпа в розвантаженні (тривалість циклу) (с), обумовлена необхідною продуктивністю підйомної установки; при цьому система підпорядкованого регулювання, до якої водять регулятори струму якоря і швидкості машини, відпрацьовує задатчиком інтенсивності задану швидкість руху V(t) вдмінно від (3) за законом H V( t ) sin p t p t(cos p t sin p t ) , (8) 2 2T 2 де H - висота підйому, м; t - поточний час, с; p - циклічна частота резонансного підйому, рад/с, яка визначається формулою p 2T Поставлена задача вирішується тим, що спосіб роботи резонансної шахтної підйомної установки, за допомогою якого здійснюється видача корисних копалин у вертикальному стволі, передбачає автоматичне регулювання електропривода, що надає руху підйомній машині, головним канатам, підвісним посудинам (скіпам, клітям), які зрівноважують канати за заданим законом від задатчика інтенсивності, відповідно до винаходу різниця погонних мас відповідно зрівноважувальних qг і головних qг канатів (сумарних для багатоканатного підйому) повинна відмінно від (5) задовольняти умові (7): 2 qy qг 2T mпр 2g , кг / м рівнянні (1) на відміну від (2) повинне бути представлене у формі гармонійної функції 4H(qy qг ) Fдв Q cos pt sin p t , (9) g 2 з частотою p , що збігається з власною час тотою осцилятора 2g ( qy mпр qг ) , рух якого описується рівнянням (1). Саме в цьому випадку, щоб задовольнити граничні умови (4), замість (2) повинне бути 2g ( qy mпр де p qг ) 2T , (10) - циклічна частота резонансного підйо му, звідки випливає, що в резонансному підйомі у порівнянні з гармонійним [див. формулу (5)] величина різниці qy qг може бути, принаймні, у чотири рази менше при одній і тій же тривалості руху Т, яка визначається за формулою (6). Можна вказати на ряд діючих багатоканатних підйомних установок у Донбасі, для яких qy qг 2 3 кг/м, причому така величина різниці викликана цілком природною причиною - неможливістю точного підбору типорозмірів головних і зрівноважувальних канатів зі стандартних сортаментів, щоб qy qг 0 , як для ідеально зрівноваженої системи. При зазначених значеннях різниці qy qг сумісність умов (6) і (10) неважко досягти, що й обумовлює передумови для практичної реалізації резонансного підйому. Таким чином, якщо у рівнянні (1) рушійне зусилля привода підпорядковується умові (9), то при задоволенні умов (4) замість (3) одержимо вирази 7 z( t ) V( t ) 74621 H 1 cos 2 2 pt 2 sin H sin 2T 2 2 H W(t) 4( 2)T 2 pt 2 2 pt 2 2 cos 2 qг pt 2,7 кг/ м. Помітимо, що різниця 10,8 кг/ м - це практично або один додатковий зрівноважувальний канат діаметром 51 мм, або два канати діаметром 36 мм , або три канати діаметром 29,5 мм конструкції ГОСТ 3088-80. У той же час для резонансного підйому різниця 2,7 кг/м може бути забезпечена природною розбіжністю сортаментних мас головних і Комп’ютерна верстка M. Клюкін sin p t(cos p t ) На фіг. 1 для порівняння побудовані діаграми швидкості для традиційного семиперіодного підйому під час керування машиною з обмеженням ривка, що дає в підсумку всього 15 періодів руху (крива 1) для гармонійного підйому М. М. Федорова 2 і для пропонованого резонансного підйому 3. Швидкість V має розмірність м/с, а час - t - с. Для можливості порівнювання результатів побудови виконані при одній і тій же тривалості циклу підйому Тц =100с, і при цьому висота підйому прийнята Н = 1000м, приведена маса установки mпр =215 m, вважається, що підйомна установка є двоскіповою з масою корисного вантажу в скіпі Q = Qгр =30000 кг. З представлених діаграм випливає, що при гармонійному і резонансному підйомах швидкості протягом циклу практично конгруентні, при цьому їхні максимальні значення приблизно на 1,5м/с менше, ніж для варіанта 15-ти періодної тахограми РУХУ. Незважаючи на порізну подібність і зовнішню подібність гармонійного і резонансного підйомів, у першому випадку потрібно мати різницю qy qг 10,8 кг/м, а в другому – всього лише qy pt 8 sin pt pt sin cos pt pt , , (11) , p t(sin p t ) cos pt . зрівноважуючих канатів принципово різних конструкцій, про що говорилося вище. На фіг. 2 зображені діаграми безрозмірних рушійних зусиль F , віднесених до величини Qгр g , відповідно для традиційного підйому з обмеженням ривка 1, для гармонійного підйому 2 і для резонансного підйому 3. Як видно, в енергетичному відношенні всі три види підйому еквівалентні, тобто витрачена електроприводом енергія для підйому корисного вантажу Qгр g на висоту Н в точності дорівнює величині Qгр gH , якщо не враховувати втрати на подолання різного роду шкідливих опорів. Однак як у гармонійному, так і в резонансному підйомі режим роботи привода носить більш «згладжений» характер [крива 2 взагалі є прямою лінією відповідно до означення (2), а крива 3 несуттєво відхиляється від прямої]. Ця обставина сприяє значному зменшенню динамічних факторів у вантажонесучих елементах системи, що не може не позначитися на збільшенні надійності й довговічності установки в цілому. Джерела інформації 1. Общесоюзные нормы технологического проектирования шахтных подъемных установок. ОНТП 5-86.- М.: Минуглепром СССР.- 1986. 2. Федоровъ М.М. Теорія и расчетъ гармоническаго рудничнаго подъема.- Екатеринославъ: Типо-Циннографія и Переплетная Густавъ Берсъ.1914.-178с. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of operation of resonance mine winder
Автори англійськоюHriaduschyi Borys Abramovych, Dvornykov Volodymyr Ivanovych, Dvornykov Mykhailo Volodymyrovych, Prystrom Volodymyr Adolfovych
Назва патенту російськоюСпособ работы резонансной шахтной подъемной установки
Автори російськоюГрядущий Борис Абрамович, Дворников Владимир Иванович, Дворников Михаил Владимирович, Пристром Владимир Адольфович
МПК / Мітки
МПК: B66B 1/06
Мітки: спосіб, установки, резонансної, підйомної, роботи, шахтної
Код посилання
<a href="https://ua.patents.su/4-74621-sposib-roboti-rezonansno-shakhtno-pidjjomno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб роботи резонансної шахтної підйомної установки</a>
Тренажер оператора шахтної підйомної установки
Номер патенту: 54207
Опубліковано: 17.02.2003
Автори: Пристром Володимир Адольфович, Морозов Вячеслав Андрійович, Коваль Анатолій Миколайович, Толошний Сергій Іванович
Мітки: підйомної, оператора, тренажер, шахтної, установки
Формула / Реферат:
1. Тренажер оператора шахтної підйомної установки, що має пульт оператора з блоком відображення технологічної інформації, перша група виходів і входів якого з'єднана з першими входами і виходами блока моделювання підйомної установки, пульт інструктора, з'єднаний з відповідними входами-виходами згаданого блока моделювання, і блок оперативної пам'яті в складі блока моделювання, який відрізняється тим, що має блок довготермінової пам'яті і блок...
Спосіб контролю руху сосуду шахтної підйомної установки
Номер патенту: 5146
Опубліковано: 28.12.1994
Автори: Плахотний Петро Іванович, Чаєв Георгій Харитонович, Копилов Володимир Михайлович, Чумакова Людмила Валентинівна, Гавруцький Олександр Юхимович, Мусієнко Володимир Дмитрович, Корольов Леонід Іванович, Євглевський Станіслав Іванович
Мітки: спосіб, сосуду, руху, шахтної, підйомної, контролю, установки
Формула / Реферат:
Способ контроля движения сосуда шахтной подъемной установки, заключающийся в непрерывном измерении величины отклонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, отличающийся тем, что, с целью повышения точности контроля, задают число допустимых отклонений, непрерывно измеряют величину местоположения сосуда, задают установочную величину, сравнивают с измеренной величиной отклонения...
Барабан шахтної підйомної машини
Номер патенту: 61682
Опубліковано: 17.11.2003
Автори: Жупієв Олександр Леонідович, Заболотний Констянтин Сергійович, Безпалько Тетяна Віталіївна
МПК: B66D 1/28, B66B 15/00
Мітки: барабан, шахтної, підйомної, машини
Формула / Реферат:
Барабан шахтної підйомної машини, який містить обичайку з гвинтовою нарізкою та ребордами по краях, який відрізняється тим, що діаметр обичайки виконано зростаючим за напрямом до реборд на ділянках обичайки від точок, в яких кути відхилення канатів дорівнюють куту гвинтової нарізки, до точок закінчення намотування.
Спосіб роботи шахтної азотно-компресорної установки
Номер патенту: 61850
Опубліковано: 17.11.2003
Автори: Пашковський Петро Семенович, Коваль Анатолій Миколайович, Лавренко Олександр Максимович, Грядущий Борис Абрамович, Філімонов Сергій Геннадійович, Жарков Павло Євгенович, Лобода Володимир Васильович
МПК: E21F 5/00, A62C 3/02, A62C 3/00
Мітки: шахтної, установки, роботи, азотно-компресорної, спосіб
Формула / Реферат:
1. Крило літального апарата, що має внутрішній силовий набір, яке відрізняється тим, що його вільний кінець додатково оснащують відрізком крила, яке розташовують площиною у напрямку руху літального апарата перпендикулярно площині крила і всмоктувальною поверхнею профілю назовні.2. Крило за п. 1, яке відрізняється тим, що відрізок крила виконують з таким профілем всмоктувальної поверхні і розташовують його під таким кутом атаки до...
Регульований дросель вихлопного пристрою підйомної установки
Номер патенту: 48661
Опубліковано: 15.08.2002
Автори: Сиротін Станіслав Степанович, Фетісов Сергій Вікторович
МПК: B66D 5/00
Мітки: дросель, підйомної, пристрою, регульованій, установки, вихлопного
Формула / Реферат:
Регульований дросель вихлопного пристрою підйомної установки, що містить ніпелі, трійник, муфту та контргайку, який відрізняється тим, що між муфтою та контргайкою розташована змінна діафрагма.
Попередній патент: Ординарне червоне десертне солодке вино та спосіб його виробництва
Наступний патент: Гусеничний транспортний засіб
Випадковий патент: Головний обтічник ракети