Автоматизована інтелектуальна транспортна система
Номер патенту: 78878
Опубліковано: 10.04.2013
Автори: Кулік Анатолій Степанович, Бортник Христина Романівна, Харіна Наталія Миколаївна, Дергачев Костянтин Юрійович

Формула / Реферат
Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з’єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, яка відрізняється тим, що введені блок датчиків параметрів руху, входи та виходи якого з'єднані з рухомим об'єктом та керуючим контролером, пристрій запису та аналізу параметрів руху, вхід якого з'єднаний з супутниковою системою, а вихід з пристроєм відображення картографічної інформації, приймач даних про місцевість, вхід якого з'єднаний з супутниковою системою, блок формування попереджуючих сигналів, вхід якого з'єднаний з приймачем даних про місцевість, і вихід з центральною станцією.
Текст
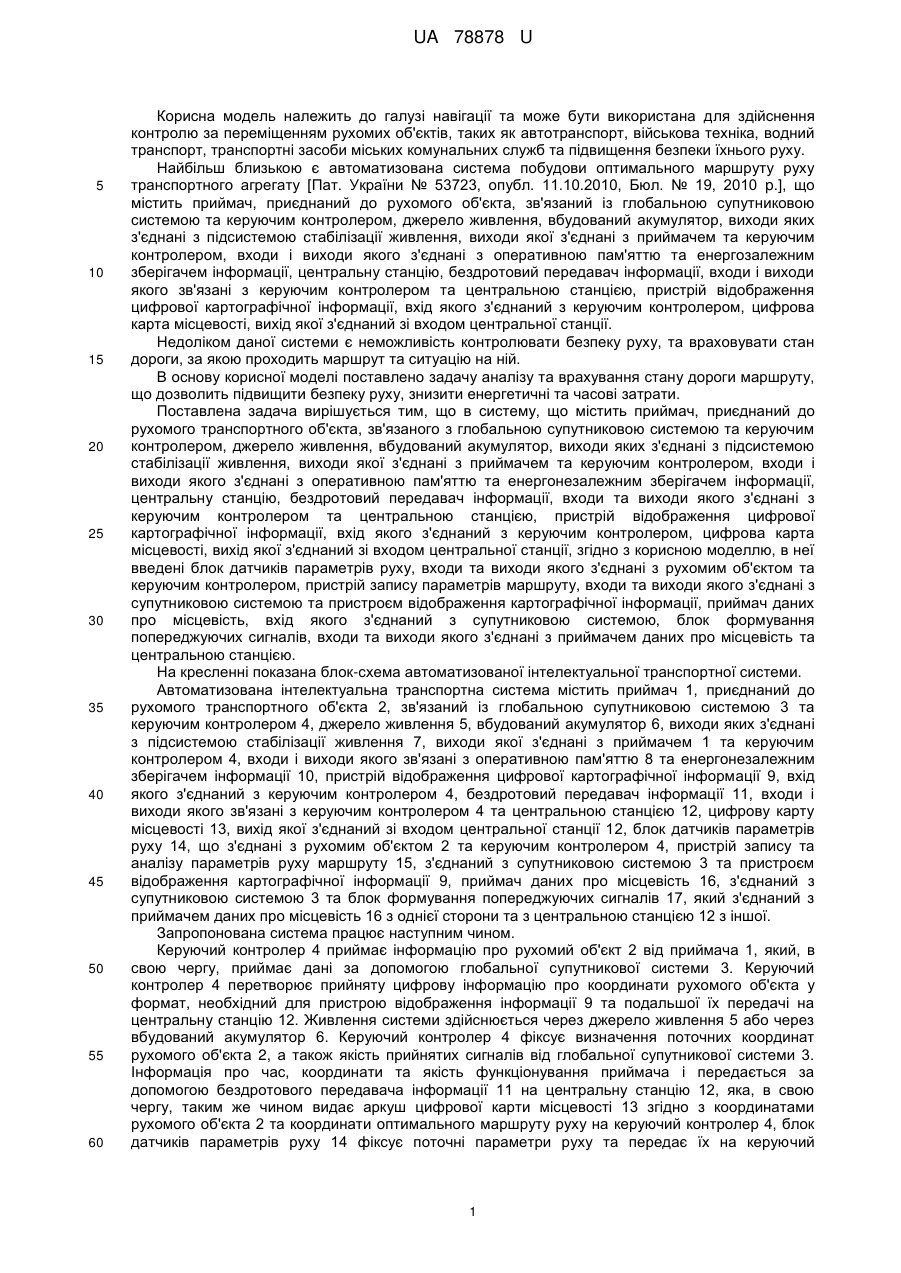
Реферат: Автоматизована інтелектуальна транспортна система містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з’єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції. Введені блок датчиків параметрів руху, входи та виходи якого з'єднані з рухомим об'єктом та керуючим контролером, пристрій запису та аналізу параметрів руху, вхід якого з'єднаний з супутниковою системою, а вихід з пристроєм відображення картографічної інформації, приймач даних про місцевість, вхід якого з'єднаний з супутниковою системою, блок формування попереджуючих сигналів, вхід якого з'єднаний з приймачем даних про місцевість, і вихід з центральною станцією. UA 78878 U (54) АВТОМАТИЗОВАНА ІНТЕЛЕКТУАЛЬНА ТРАНСПОРТНА СИСТЕМА UA 78878 U UA 78878 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі навігації та може бути використана для здійснення контролю за переміщенням рухомих об'єктів, таких як автотранспорт, військова техніка, водний транспорт, транспортні засоби міських комунальних служб та підвищення безпеки їхнього руху. Найбільш близькою є автоматизована система побудови оптимального маршруту руху транспортного агрегату [Пат. України № 53723, опубл. 11.10.2010, Бюл. № 19, 2010 p.], що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергозалежним зберігачем інформації, центральну станцію, бездротовий передавач інформації, входи і виходи якого зв'язані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції. Недоліком даної системи є неможливість контролювати безпеку руху, та враховувати стан дороги, за якою проходить маршрут та ситуацію на ній. В основу корисної моделі поставлено задачу аналізу та врахування стану дороги маршруту, що дозволить підвищити безпеку руху, знизити енергетичні та часові затрати. Поставлена задача вирішується тим, що в систему, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаного з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, центральну станцію, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, згідно з корисною моделлю, в неї введені блок датчиків параметрів руху, входи та виходи якого з'єднані з рухомим об'єктом та керуючим контролером, пристрій запису параметрів маршруту, входи та виходи якого з'єднані з супутниковою системою та пристроєм відображення картографічної інформації, приймач даних про місцевість, вхід якого з'єднаний з супутниковою системою, блок формування попереджуючих сигналів, входи та виходи якого з'єднані з приймачем даних про місцевість та центральною станцією. На кресленні показана блок-схема автоматизованої інтелектуальної транспортної системи. Автоматизована інтелектуальна транспортна система містить приймач 1, приєднаний до рухомого транспортного об'єкта 2, зв'язаний із глобальною супутниковою системою 3 та керуючим контролером 4, джерело живлення 5, вбудований акумулятор 6, виходи яких з'єднані з підсистемою стабілізації живлення 7, виходи якої з'єднані з приймачем 1 та керуючим контролером 4, входи і виходи якого зв'язані з оперативною пам'яттю 8 та енергонезалежним зберігачем інформації 10, пристрій відображення цифрової картографічної інформації 9, вхід якого з'єднаний з керуючим контролером 4, бездротовий передавач інформації 11, входи і виходи якого зв'язані з керуючим контролером 4 та центральною станцією 12, цифрову карту місцевості 13, вихід якої з'єднаний зі входом центральної станції 12, блок датчиків параметрів руху 14, що з'єднані з рухомим об'єктом 2 та керуючим контролером 4, пристрій запису та аналізу параметрів руху маршруту 15, з'єднаний з супутниковою системою 3 та пристроєм відображення картографічної інформації 9, приймач даних про місцевість 16, з'єднаний з супутниковою системою 3 та блок формування попереджуючих сигналів 17, який з'єднаний з приймачем даних про місцевість 16 з однієї сторони та з центральною станцією 12 з іншої. Запропонована система працює наступним чином. Керуючий контролер 4 приймає інформацію про рухомий об'єкт 2 від приймача 1, який, в свою чергу, приймає дані за допомогою глобальної супутникової системи 3. Керуючий контролер 4 перетворює прийняту цифрову інформацію про координати рухомого об'єкта у формат, необхідний для пристрою відображення інформації 9 та подальшої їх передачі на центральну станцію 12. Живлення системи здійснюється через джерело живлення 5 або через вбудований акумулятор 6. Керуючий контролер 4 фіксує визначення поточних координат рухомого об'єкта 2, а також якість прийнятих сигналів від глобальної супутникової системи 3. Інформація про час, координати та якість функціонування приймача і передається за допомогою бездротового передавача інформації 11 на центральну станцію 12, яка, в свою чергу, таким же чином видає аркуш цифрової карти місцевості 13 згідно з координатами рухомого об'єкта 2 та координати оптимального маршруту руху на керуючий контролер 4, блок датчиків параметрів руху 14 фіксує поточні параметри руху та передає їх на керуючий 1 UA 78878 U 5 10 15 20 25 контролер 4, який аналізує отриману інформацію і видає значення на пристрій відображення інформації 9 та пристрій запису та аналізу параметрів руху 15, на приймач даних про місцевість 16 надходить інформація про стан маршруту від супутникової системи 3, ця інформація надходить блок формування попереджуючих сигналів 17, що видає звіт про безпеку руху на центральну станцію 12, що при необхідності передає попереджувальний сигнал до керуючого контролера 4. Таким чином, запропонована система підвищує безпеку руху, та допомагає уникнути енергетичних та часових втрат при поганій дорозі чи наявності перешкод. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з’єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, яка відрізняється тим, що введені блок датчиків параметрів руху, входи та виходи якого з'єднані з рухомим об'єктом та керуючим контролером, пристрій запису та аналізу параметрів руху, вхід якого з'єднаний з супутниковою системою, а вихід з пристроєм відображення картографічної інформації, приймач даних про місцевість, вхід якого з'єднаний з супутниковою системою, блок формування попереджуючих сигналів, вхід якого з'єднаний з приймачем даних про місцевість, і вихід з центральною станцією. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated intellectual transport system
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Bortnyk Khrystyna Romanivna, Kharina Natalia Mykolaivna
Назва патенту російськоюАвтоматизированная интеллектуальная транспортная система
Автори російськоюКулик Анатолий Степанович, Дергачев Константин Юрьевич, Бортник Кристина Романовна, Харина Наталья Николаевна
МПК / Мітки
МПК: G01S 3/02
Мітки: транспортна, інтелектуальна, система, автоматизована
Код посилання
<a href="https://ua.patents.su/4-78878-avtomatizovana-intelektualna-transportna-sistema.html" target="_blank" rel="follow" title="База патентів України">Автоматизована інтелектуальна транспортна система</a>
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Морозов Володимир Володимирович, Грібков Антон Євгенович
МПК: G01S 3/02
Мітки: транспортного, маршруту, побудови, руху, агрегату, автоматизована, система, оптимального
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Дорош Ігор Сергійович, Дергачев Костянтин Юрійович, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: об'єкта, маршруту, руху, визначення, транспортного, система
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Автоматизована система автономної навігації
Номер патенту: 55294
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Грібков Антон Євгенович, Морозов Володимир Володимирович, Дергачов Констянтин Юрійович
МПК: G01S 3/02
Мітки: автоматизована, навігації, система, автономно
Формула / Реферат:
Автоматизована система автономної навігації, що містить приймач, зв'язаний із глобальною супутниковою системою, перший вихід якого зв'язаний з першим входом керуючого контролера, вбудовані акумулятори, вхід і вихід яких з'єднані з підсистемою стабілізації живлення, вихід якої з'єднаний з входами живлення приймача, керуючого контролера, енергонезалежної пам'яті, GSM модема і пристрою вводу-виводу навігаційної інформації, вхід та вихід якого...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Сосницький Віталій Валерійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: автоматичного, система, місцезнаходження, об'єкта, рухомого, виявлення
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Кошелева Марія Миколаївна, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: система, місцеположення, об'єктів, визначення, рухомих
Формула / Реферат:
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Попередній патент: Система контролю витрат палива
Наступний патент: Двоантенний кореляційний радіометр
Випадковий патент: Похідні цинаміду, корисні при лікуванні запальних та імунних захворювань, композиція, що містить такі похідні, і спосіб одержання похідних цинаміду