Індуктивний датчик

Формула / Реферат
Індуктивний датчик, що містить плаский прохідний якір та першу пару магнітопроводів з котушками, який відрізняється тим, що розташовано додаткову пару магнітопроводів з котушками, осі яких зміщені відносно осей основних магнітопроводів з котушками вздовж бокових торців прохідного якоря на відстань, що дорівнює двом радіусам магнітопроводу з котушкою, а осі всіх магнітопроводів з котушками розміщені від зазначених бокових торців прохідного якоря на відстані, що дорівнює радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками, розташовані навхрест відносно прохідного якоря, через підсилювально-перетворювальні канали зв'язано з суматором.
Текст
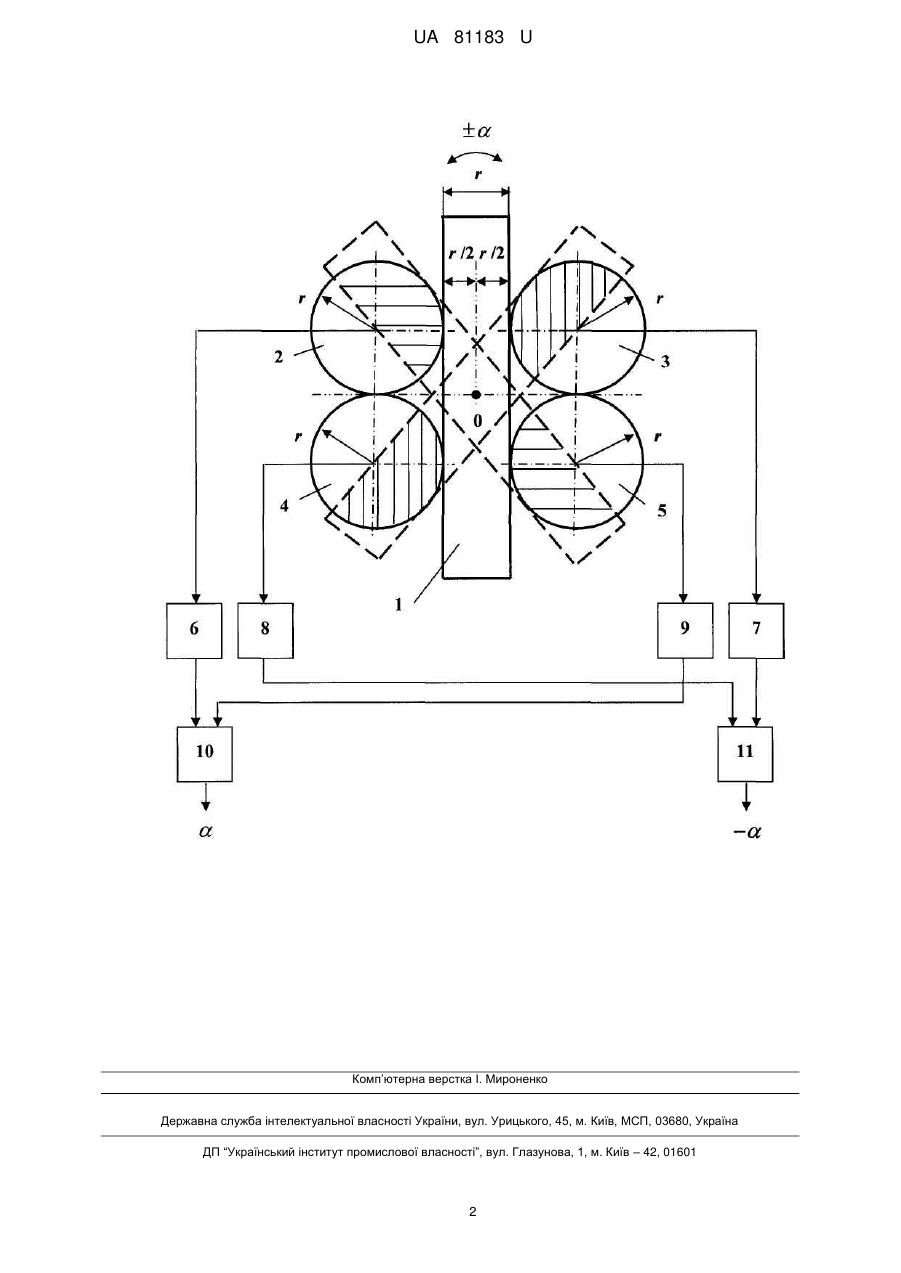
Реферат: UA 81183 U UA 81183 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання кутових переміщень. Відомо диференціальний індуктивний датчик зусиль, який являє собою здвоєну магнітну систему, що містить плаский прохідний якір та два магнітопроводи з котушками [див. Индуктивные преобразователи для автоматизации металлорежущих станков / М.П. Рашкович, П.М. Рашкович, Б.И. Шкловский. - М.: Машиностроение, -1969. - С. 9, 10, рис. 26]. Цей диференціальний індуктивний перетворювач вибрано за прототип. Недоліком відомого диференціального індуктивного перетворювача є те, що його неможливо використовувати для вимірювання кутових переміщень. В основу корисної моделі поставлено задачу вдосконалення індуктивного датчика шляхом того, що в ньому розташовано додаткову пару магнітопроводів з котушками, осі яких зміщені відносно осей основних магнітопроводів з котушками вздовж бокових торців прохідного якоря на відстань, що дорівнює двом радіусам магнітопроводу з котушкою, а осі всіх магнітопроводів з котушками розміщені від зазначених бокових торців прохідного якоря на відстані, що дорівнює радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками, розташовані навхрест відносно прохідного якоря, через підсилювально-перетворювальні канали зв'язано з суматором, що завдяки вимірюванню кутових переміщень дозволить розширити сферу застосування датчика. Поставлена задача вирішується тим, що в індуктивному датчику, що містить плаский прохідний якір та першу пару магнітопроводів з котушками, згідно з корисною моделлю, розташовано додаткову пару магнітопроводів з котушками, осі яких зміщені відносно осей основних магнітопроводів з котушками вздовж бокових торців прохідного якоря на відстань, що дорівнює двом радіусам магнітопроводу з котушкою, а осі всіх магнітопроводів з котушками розміщені від зазначених бокових торців прохідного якоря на відстані, що дорівнює радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками, розташовані навхрест відносно прохідного якоря, через підсилювально-перетворювальні канали зв'язано з суматором. Суть корисної моделі пояснюється кресленням, де зображено індуктивний датчик, що містить прохідний якір 1 шириною r, першу 2, 3 та другу 4, 5 пари магнітопроводів з котушками радіуса r, підсилювально-перетворювальні канали 6-9 та суматори 10, 11. Перша 2, 3 та друга 4, 5 пари магнітопроводів з котушками зміщені від протилежних торців прохідного якоря 1 на відстань, що дорівнює радіусу r магнітопроводу з котушкою, а магнітопроводи з котушками 2, 4 та 3, 5 розташовані попарно один від одного на відстані, що дорівнює двом радіусам 2r магнітопроводу з котушкою, при цьому ось обертання 0 прохідного якоря 1 має координати 3r/2; r. Індуктивний датчик працює наступним чином. При куті повороту α = 0 прохідного якоря 1 магнітопроводи з котушками 2-5 індуктивно з ним не зв'язані, тому на їхніх виходах обмоток сигнали відсутні, а на виході суматорів 10, 11 результативні сигнали α, - α дорівнюють нулю. При повороті прохідного якоря 1 навколо осі 0, наприклад, проти годинної стрілки на певний кут α0 на виходах обмоток кожного з магнітопроводів з котушками 2, 5 сигнали збільшуються, при цьому результативний сигнал а на виході суматора 10 буде дорівнювати подвоєному значенню приросту сигналів кожного з магнітопроводів з котушками 2, 5. При повороті прохідного якоря 1 навколо осі 0, наприклад, за годинною стрілкою на певний кут -α0 на виходах обмоток кожного з магнітопроводів з котушками 3, 4 сигнали збільшуються, при цьому результативний сигнал -α на виході суматора 11 буде дорівнювати подвоєному значенню приросту сигналів кожного з магнітопроводів з котушками 3, 4 На кресленні заштриховані площі відповідають максимальним кутам повороту прохідного якоря 1. Пропонована корисна модель водночас забезпечить підвищену чутливість датчика. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Індуктивний датчик, що містить плаский прохідний якір та першу пару магнітопроводів з котушками, який відрізняється тим, що розташовано додаткову пару магнітопроводів з котушками, осі яких зміщені відносно осей основних магнітопроводів з котушками вздовж бокових торців прохідного якоря на відстань, що дорівнює двом радіусам магнітопроводу з котушкою, а осі всіх магнітопроводів з котушками розміщені від зазначених бокових торців прохідного якоря на відстані, що дорівнює радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками, розташовані навхрест відносно прохідного якоря, через підсилювально-перетворювальні канали зв'язано з суматором. 1 UA 81183 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюInductive sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюИндуктивный датчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, індуктивний
Код посилання
<a href="https://ua.patents.su/4-81183-induktivnijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Індуктивний датчик</a>
Індуктивний датчик
Номер патенту: 77857
Опубліковано: 25.02.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, індуктивний
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано -подібної форми, відносно бокових торців якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстані, що дорівнюють радіусу магнітопроводу з котушкою, причому...
Індуктивний датчик
Номер патенту: 75324
Опубліковано: 26.11.2012
Автор: Смірний Михайло Федорович
МПК: G01B 7/00
Мітки: датчик, індуктивний
Формула / Реферат:
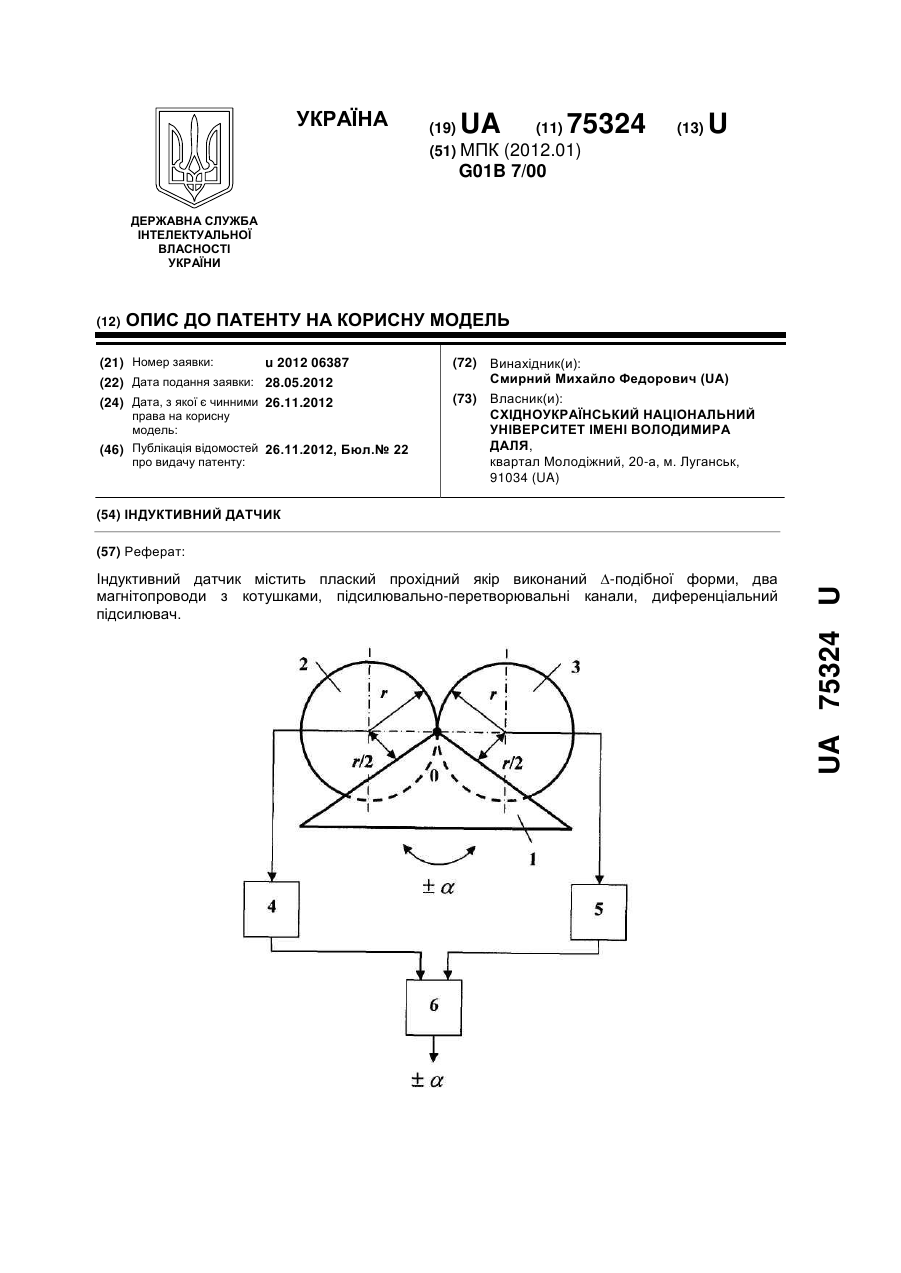
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано D-подібної форми, відносно бокових торців якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстань, що дорівнює половині радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через з підсилювально-перетворювальні канали...
Диференціальний індуктивний датчик зусиль
Номер патенту: 50564
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
Мітки: зусиль, індуктивний, диференціальний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить першу пару магнітопроводів з котушками, розміщену по один бік прохідного якоря у зонах його протилежних торців, який відрізняється тим, що у датчику розташовано другу пару магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з...
Індуктивний датчик
Номер патенту: 70988
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, датчик
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали...
Диференціальний індуктивний датчик
Номер патенту: 64122
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, диференціальний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик, що містить першу та другу пари магнітопроводів з котушками, розміщених по обидва боки прохідного якоря у зонах його протилежних торців на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, при цьому магнітопроводи з котушками з'єднані з підсилювально-перетворювальними каналами, який відрізняється тим, що...
Попередній патент: Датчик вібрацій
Наступний патент: Спосіб визначення відповідності розмірів легенів плода терміну вагітності
Випадковий патент: Здрібнювач-сушарка глинистої сировини