Гіродинамічна система (“гіротурбіна”)
Формула / Реферат
1. Гіродинамічна система, що містить корпус (1), рушій (2), зубчасту передачу (3, 4), маховики (5, 5а), які обертаються навколо відповідних локальних осей (7) та встановлені на обертовій платформі (8, 9) для забезпечення примусової прецесії маховиків навколо другої осі (10), що розташована поза межами усіх маховиків (5, 5а), які кінематичнo зв'язані з корпусом (1) через зубчасту передачу (3, 4), яка відрізняється тим, що маховик (5а) кінематичнo з'єднаний з рушієм (2), встановленим співвісно з маховиком (5а), а коефіцієнт редукування q зубчастої передачі (3, 4) вибраний кратним цілому числу і знаходиться в межах ![]() .
.
2. Гіродинамічна система за п. 1, яка відрізняється тим, що кількість маховиків (5, 5а) дорівнює коефіцієнту редукування q зубчастої передачі (3, 4).
3. Гіродинамічна система за п. 1, яка відрізняється тим, що кожен маховик (5, 5а) виконаний за формою кільцевого зрізаного конуса, діаметр D основи якого визначається співвідношенням ![]() , де А - відстань основи маховика (5, 5а) від вертикальної осі (10),
, де А - відстань основи маховика (5, 5а) від вертикальної осі (10), ![]() - кутова швидкість обертання маховика навколо локальної осі, k - безрозмірний коефіцієнт в межах від 2,1 до 3,0.
- кутова швидкість обертання маховика навколо локальної осі, k - безрозмірний коефіцієнт в межах від 2,1 до 3,0.
4. Гіродинамічна система за п. 1, яка відрізняється тим, що обертова платформа виконана за формою двох паралельних дисків (8, 9) з вікнами (12) для розташування маховиків (5, 5а), диски з'єднані між собою дистанційними стійками (13) та ребрами жорсткості (15), а маховики (5, 5а) встановлені в вікнах (12) між паралельними дисками (8, 9) на підшипниках (6), що розташовані в дистанційних стійках (13).
Текст
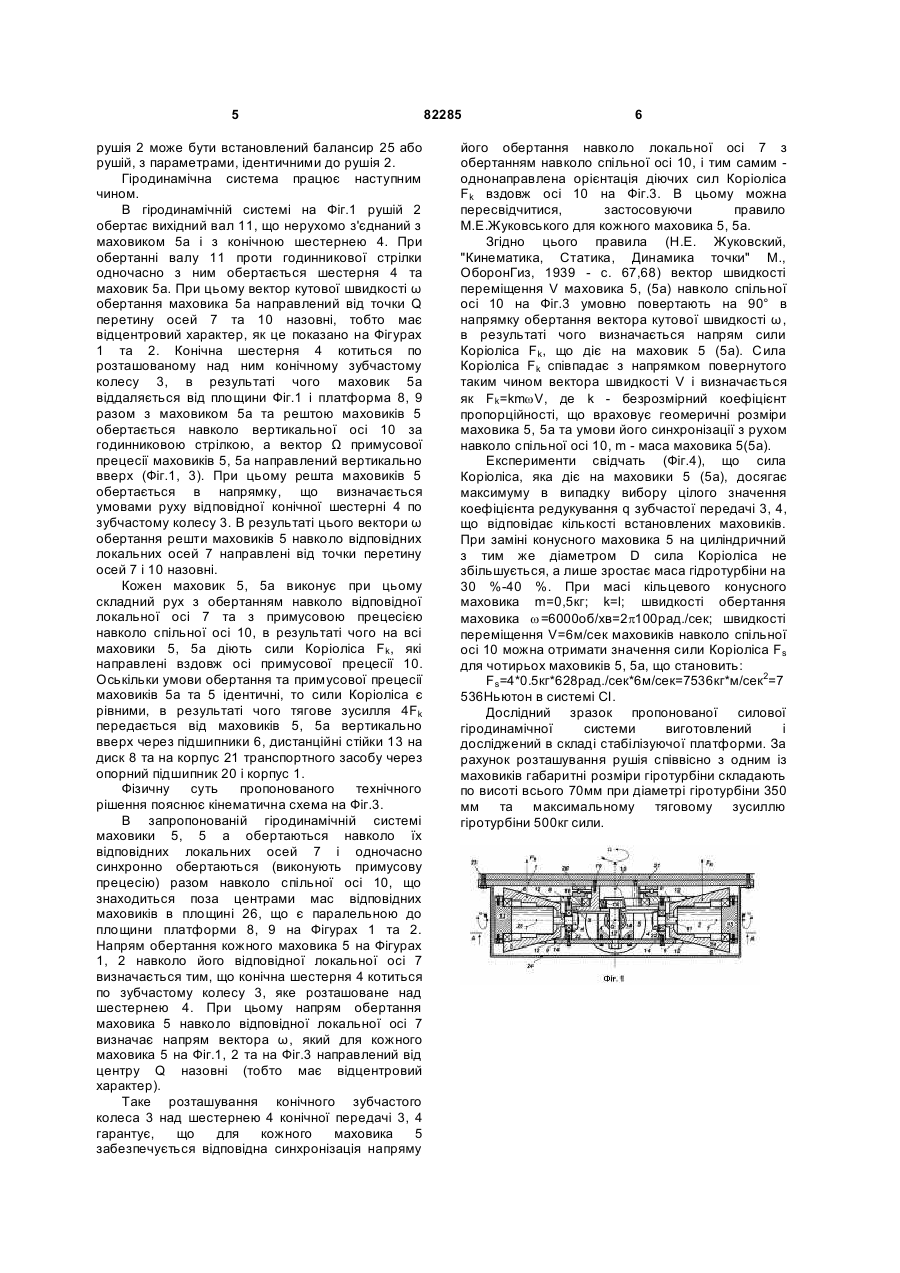
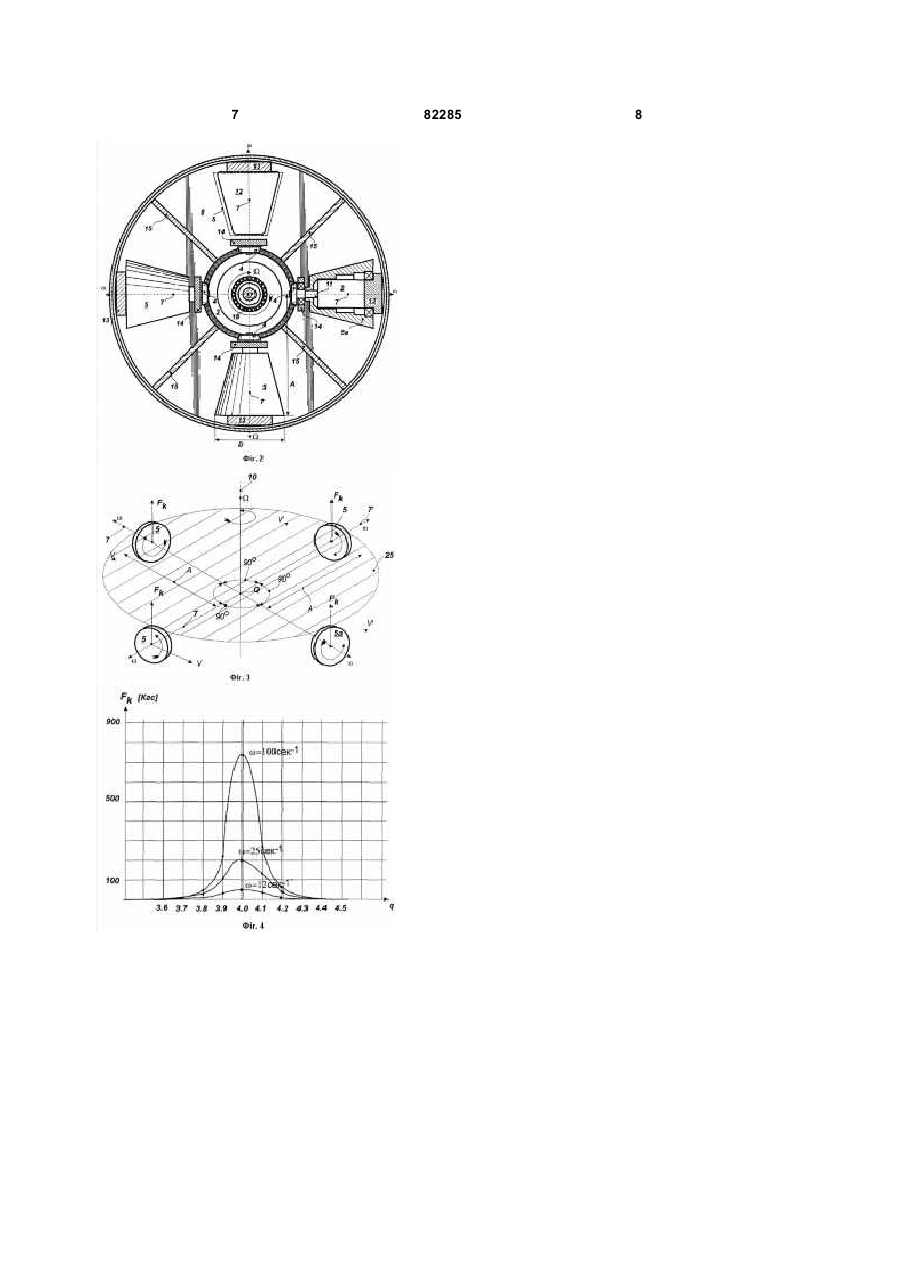
1. Гіродинамічна система, що містить корпус (1), рушій (2), зубчасту передачу (3, 4), маховики (5, 5а), які обертаються навколо відповідних локальних осей (7) та встановлені на обертовій платформі (8, 9) для забезпечення примусової прецесії маховиків навколо другої осі (10), що розташована поза межами усіх маховиків (5, 5а), які кінематичнo зв'язані з корпусом (1) через зубчасту передачу (3, 4), яка відрізняється тим, що маховик (5а) кінематичнo з'єднаний з рушієм (2), встановленим співвісно з маховиком (5а), а коефіцієнт редукування q зубчастої передачі (3, 4) C2 2 (19) 1 3 (гіротурбіна), що містить корпус, рушій, зубчасту передачу, маховики, що обертаються навколо відповідних горизонтальних локальних осей обертання та обертову платформу для забезпечення примусової прецесії маховиків навколо другої вертикальної осі, що є перпендикулярною до локальних осей обертання, та розташована за межами усіх маховиків, які встановлені через підшипники на обертовій платформі разом з рушієм, що кінематичне з'єднаний з корпусом (патент UA №15766 B64G1/28, G01C19/110, публ. 17.072006]. Вертикально розташований рушій в такий гіродинамічній системі збільшує розміри відомого пристрою в вертикальному напрямку. Метою пропонованого технічного рішення є зменшення габаритів гіродинамічної системи за рахунок оптимального вибору розмірів маховиків та розташування рушія вздовж локальної осі. З цією метою гіродинамічна система, що містить корпус, рушій, зубчасту передачу, маховики, що обертаються навколо відповідних локальних осей та встановлені на обертовій платформі для забезпечення примусової прецесії маховиків навколо другої осі, що розташована поза межами усіх маховиків, які кінематичне зв'язані з корпусом через зубчасту передачу згідно пропозиції, маховик кінематичнo з'єднаний з рушієм, що встановлений співвісно з маховиком, а коефіцієнт редукування q зубчастої передачі кратний цілому числу і знаходиться в межах 4£q£12. Крім того, згідно пропозиції, число маховиків дорівнює коефіцієнту редукування q зубчастої передачі. Крім того, згідно пропозиції, кожен маховик виконаний в формі кільцевого зрізаного конуса, діаметр D основи якого визначається співідношенням D=kΑΩ/ω; Α - відстань основи маховика від вертикальної осі; ω - кутова швидкість обертання маховика навколо локальної осі; k - безрозмірний коефіцієнт в межах 2.1-3.0. Крім того, згідно пропозиції, обертова платформа виконана в вигляді двох паралельних дисків з вікнами для розташування маховиків, диски з'єднані між собою дистанційними стійками та ребрами жорсткості, маховики встановлені між паралельними дисками на підшипниках, що розташованиі в дистанційних стійках. Між досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв'язок. Розташування привідного рушія співвісно з локальною віссю зменшує розміри гіротурбіни в вертикальному напрямку, а вибір коефіцієнт редукування q зубчастої передачі в межах 4£q£12 дозволяє зменшити максимальний діаметр основи конусного маховика. Розташування маховиків в вікнах паралельних дисків обертової платформи також зменшує габарити гіродинамічної системи. На Фіг.1 зображено розріз пропонованой гіродинамічної системи. На Фіг.2 зображено вид знизу по лінії А-А системи згідно Фіг.1. На Фіг.3 показана кінематична схема, що пояснює суть пропонованого технічного рішення. 82285 4 На Фіг.4 приведені графічні дані експериментів з коефіцієнтом редукування зубчастої передачі гіротурбіни. Гіродинамічна система на Фігурах 1 та 2 містить корпус 1, рушій 2, зубчасту конусну передачу 3, 4, конусні маховики 5, 5а з ідентичними геометричними параметрами, що обертаються на підшипниках 6 навколо відповідних локальних осей 7. Чотири маховики 5, 5а встановлені на обертовій платформі 8, 9 для забезпечення їх примусової прецесії навколо другої осі 10, що розташована поза межами усіх маховиків 5(5а), які кінематичне зв'язані з корпусом 1 через зубчасту конічну передачу 3, 4. Конічні шестерні 4 мають однакову кількість зубців та ідентичні параметри. Один з маховиків 5а кінематичнo з'єднаний з вихідним валом 11 рушія 2, що розташований на одній осі 7 з відповідним маховиком 5а. Обертова платформа виконана в вигляді двох паралельно розташованих дисків 8, 9 з вікнами 12 для розташування маховиків 5, 5а. Диски 8, 9 з'єднані між собою дистанційними стійками 13, 14 та ребрами жорсткості 15 (див. Фіг.2). На Фіг.2 один з маховиків 5 умовно не показаний для того, щоб детальніше відобразити конфігурацію вікна 12. Маховики 5 встановлені між паралельними дисками 8, 9 на підшипниках 6 в дистанційних стійках 13. Коефіцієнт редукування q зубчастої конічної передачі 3, 4 кратний цілому числу та вибраний рівним 4. Кожен маховик 5, 5а виконано в формі пустотілого зрізаного конуса, діаметр D основи якого (Фіг.2) визначається співвідношенням D=ΑΩ/ω; А - відстань основи маховика 5 від вертикальної осі 10; ω - кутова швидкість обертання маховика навколо локальної осі 7. Диски 8, 9 разом з маховикам 5, 5а обертаються навколо другої (вертикальної) осі 10. При цьому верхний диск 8 встановлений у підшипнику 16. Нижній диск 9 опирається на вертикальний вал 17, що обертається в конусному підшипнику 18. За допомогою підшипника 18 та вертикального валу 17 забезпечується підвіска платформи 8, 9 в неробочому стані для забезпечення зачеплення конічних шестерень 4 з зубчастим колесом 3. Зубчасте колесо 3 прикріплено до корпусу 1 за допомогою відповідної кількості гвинтів 19. Між верхнім диском 8 та корпусом 1 розташований упорний підшипник 20, призначений для передачі тягового зусилля сил Коріоліса від маховиків 5, 5а на корпус 21 транспортного засобу. Конічні шестерні 4 встановлені в дистанційних стійках 14 через підшипники 22 та з'єднані з маховиками 5, 5а, наприклад, штифтами. Корпус 1 силової гіродинамічної системи прикріплений до корпусу 21 транспортного засобу (космічного апарату) за допомогою відповідних елементів кріплення 23. Гіротурбіна на Фіг.захищена знизу кожухом 24. Для забезпечення збалансованості конструкції платформи 8, 9 відносно спільної осі 10 напроти 5 рушія 2 може бути встановлений балансир 25 або рушій, з параметрами, ідентичними до рушія 2. Гіродинамічна система працює наступним чином. В гіродинамічній системі на Фіг.1 рушій 2 обертає вихідний вал 11, що нерухомо з'єднаний з маховиком 5а і з конічною шестернею 4. При обертанні валу 11 проти годинникової стрілки одночасно з ним обертається шестерня 4 та маховик 5а. При цьому вектор кутової швидкості ω обертання маховика 5а направлений від точки Q перетину осей 7 та 10 назовні, тобто має відцентровий характер, як це показано на Фігурах 1 та 2. Конічна шестерня 4 котиться по розташованому над ним конічному зубчастому колесу 3, в результаті чого маховик 5а віддаляється від площини Фіг.1 і платформа 8, 9 разом з маховиком 5а та рештою маховиків 5 обертається навколо вертикальної осі 10 за годинниковою стрілкою, а вектор Ω примусової прецесії маховиків 5, 5а направлений вертикально вверх (Фіг.1, 3). При цьому решта маховиків 5 обертається в напрямку, що визначається умовами руху відповідної конічної шестерні 4 по зубчастому колесу 3. В результаті цього вектори ω обертання решти маховиків 5 навколо відповідних локальних осей 7 направлені від точки перетину осей 7 і 10 назовні. Кожен маховик 5, 5а виконує при цьому складний рух з обертанням навколо відповідної локальної осі 7 та з примусовою прецесією навколо спільної осі 10, в результаті чого на всі маховики 5, 5а діють сили Коріоліса Fk, які направлені вздовж осі примусової прецесії 10. Оськільки умови обертання та примусової прецесії маховиків 5а та 5 ідентичні, то сили Коріоліса є рівними, в результаті чого тягове зусилля 4Fk передається від маховиків 5, 5а вертикально вверх через підшипники 6, дистанційні стійки 13 на диск 8 та на корпус 21 транспортного засобу через опорний підшипник 20 і корпус 1. Фізичну суть пропонованого технічного рішення пояснює кінематична схема на Фіг.3. В запропонованій гіродинамічній системі маховики 5, 5 а обертаються навколо їх відповідних локальних осей 7 і одночасно синхронно обертаються (виконують примусову прецесію) разом навколо спільної осі 10, що знаходиться поза центрами мас відповідних маховиків в площині 26, що є паралельною до площини платформи 8, 9 на Фігурах 1 та 2. Напрям обертання кожного маховика 5 на Фігурах 1, 2 навколо його відповідної локальної осі 7 визначається тим, що конічна шестерня 4 котиться по зубчастому колесу 3, яке розташоване над шестернею 4. При цьому напрям обертання маховика 5 навколо відповідної локальної осі 7 визначає напрям вектора ω, який для кожного маховика 5 на Фіг.1, 2 та на Фіг.3 направлений від центру Q назовні (тобто має відцентровий характер). Таке розташування конічного зубчастого колеса 3 над шестернею 4 конічної передачі 3, 4 гарантує, що для кожного маховика 5 забезпечується відповідна синхронізація напряму 82285 6 його обертання навколо локальної осі 7 з обертанням навколо спільної осі 10, і тим самим однонаправлена орієнтація діючих сил Коріоліса Fk вздовж осі 10 на Фіг.3. В цьому можна пересвідчитися, застосовуючи правило М.Е.Жуковського для кожного маховика 5, 5а. Згідно цього правила (Н.Е. Жуковский, "Кинематика, Статика, Динамика точки" Μ., ОборонГиз, 1939 - с. 67,68) вектор швидкості переміщення V маховика 5, (5а) навколо спільної осі 10 на Фіг.3 умовно повертають на 90° в напрямку обертання вектора кутової швидкості ω, в результаті чого визначається напрям сили Коріоліса Fk, що діє на маховик 5 (5а). Сила Коріоліса Fk співпадає з напрямком повернутого таким чином вектора швидкості V і визначається як Fk=kmwV, де k - безрозмірний коефіцієнт пропорційності, що враховує геомеричні розміри маховика 5, 5а та умови його синхронізації з рухом навколо спільної осі 10, m - маса маховика 5(5а). Експерименти свідчать (Фіг.4), що сила Коріоліса, яка діє на маховики 5 (5а), досягає максимуму в випадку вибору цілого значення коефіцієнта редукування q зубчастої передачі 3, 4, що відповідає кількості встановлених маховиків. При заміні конусного маховика 5 на циліндричний з тим же діаметром D сила Коріоліса не збільшується, а лише зростає маса гідротурбіни на 30 %-40 %. При масі кільцевого конусного маховика m=0,5кг; k=l; швидкості обертання маховика w =6000об/хв=2p100рад./сек; швидкості переміщення V=6м/сек маховиків навколо спільної осі 10 можна отримати значення сили Коріоліса Fs для чотирьох маховиків 5, 5а, що становить: Fs=4*0.5кг*628рад./сек*6м/сек=7536кг*м/сек2=7 536Ньютон в системі СІ. Дослідний зразок пропонованої силової гіродинамічної системи виготовлений і досліджений в складі стабілізуючої платформи. За рахунок розташування рушія співвісно з одним із маховиків габаритні розміри гіротурбіни складають по висоті всього 70мм при діаметрі гіротурбіни 350 мм та максимальному тяговому зусиллю гіротурбіни 500кг сили. 7 82285 8
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro-dynamical system (gyro-turbine)
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюГиродинамическая система («гиротурбина»)
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: F03G 3/00, G01C 19/00, B64G 1/24
Мітки: система, гіротурбіна, гіродинамічна
Код посилання
<a href="https://ua.patents.su/4-82285-girodinamichna-sistema-giroturbina.html" target="_blank" rel="follow" title="База патентів України">Гіродинамічна система (“гіротурбіна”)</a>
Силова гіродинамічна система “гіротурбіна”
Номер патенту: 80893
Опубліковано: 12.11.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: силова, гіродинамічна, система, гіротурбіна
Формула / Реферат:
1. Силова гіродинамічна система, що містить корпус, рушій, вузол повороту для здійснення примусової прецесії, який кінематично зв’язаний з рушієм, маховики, що розташовані навколо осі прецесії і встановлені з можливістю обертання в різних напрямках навколо відповідної локальної осі обертання маховика, при цьому всі маховики закріплені в вузлі повороту з можливістю переміщення навколо осі прецесії, яка відрізняється тим, що вузол повороту...
Гіротурбіна лиховида
Номер патенту: 15766
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: лиховида, гіротурбіна
Формула / Реферат:
1. Гіротурбіна, що містить корпус, рушій, зубчасту передачу, маховик, що обертається навколо локальної осі обертання, та вузол повороту навколо другої осі, яка відрізняється тим, що вузол повороту оснащено обертовою платформою та щонайменше двома додатковими маховиками, які встановлені через підшипники на обертовій платформі, а локальні осі обертання маховиків розташовані в площині обертової платформи перпендикулярно до другої осі, що...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Малєва Людмила Сергіївна, Бандура Іван Миколайович, Гордін Олександр Григорович
МПК: B64G 1/24
Мітки: керування, літальним, система, апаратом, космічним
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Батаєв Віктор Олександрович, Бандура Іван Миколайович, Погудін Андрій Володимирович, Овсяннікова Ірина Валеріївна
МПК: B64G 1/24
Мітки: керування, апаратом, система, космічним, літальним
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Варіатор юрківа
Номер патенту: 52788
Опубліковано: 15.01.2003
Автор: Юрків Василь Федорович
МПК: F16H 15/00
Формула / Реферат:
Варіатор, який містить маховики, вхідний і вихідний вали, на одному з яких закріплено центральне коло, а на другому - водило з сателітами, який відрізняється тим, що сателіти споряджені кривошипами, пальці яких кінематично зв’язані з маховиками, поворотно посадженими на вхідному валу варіатора.
Попередній патент: Клей термопластичний
Наступний патент: Модулятори андрогенового рецептора
Випадковий патент: Спосіб очистки води