Гіротурбіна лиховида
Формула / Реферат
1. Гіротурбіна, що містить корпус, рушій, зубчасту передачу, маховик, що обертається навколо локальної осі обертання, та вузол повороту навколо другої осі, яка відрізняється тим, що вузол повороту оснащено обертовою платформою та щонайменше двома додатковими маховиками, які встановлені через підшипники на обертовій платформі, а локальні осі обертання маховиків розташовані в площині обертової платформи перпендикулярно до другої осі, що розташована за межами усіх маховиків.
2. Гіротурбіна за п. 1, яка відрізняється тим, що обертова платформа безпосередньо з'єднана з вихідним валом рушія, а всі маховики кінематично зв'язані з корпусом через зубчасту передачу.
3. Гіротурбіна за п. 1, яка відрізняється тим, що на обертовій платформі встановлено рушій, вихідний вал якого кінематично з'єднаний з корпусом через зубчасту передачу.
4. Гіротурбіна за п. 1, яка відрізняється тим, що кутова швидкість ![]() обертання маховика навколо локальної осі синхронізована з кутовою швидкістю вектора
обертання маховика навколо локальної осі синхронізована з кутовою швидкістю вектора ![]() переміщення маховика відносно другої осі.
переміщення маховика відносно другої осі.
5. Гіротурбіна за п. 1, яка відрізняється тим, що локальні осі обертання маховиків розташовані на однаковій кутовій відстані одна від одної.
6. Гіротурбіна за п. 1, яка відрізняється тим, що кожен маховик обертається відповідним додатковим електродвигуном.
7. Гіротурбіна за п. 1, яка відрізняється тим, що кожен маховик виконано у формі кільця.
8. Гіротурбіна за п. 1, яка відрізняється тим, що кожен маховик виконано спільно з ротором відповідного електрорушія.
9. Гіротурбіна за пп. 1 та 4, яка відрізняється тим, що маховик встановлено з можливістю обертання навколо відповідної локальної осі в напрямку, що визначається повернутим вектором ![]() кутової швидкості обертової платформи при його суміщенні з відповідною локальною віссю обертання маховика, в результаті чого напрямок обертання маховика навколо відповідної локальної осі відповідає напрямку обертання повернутого вектора
кутової швидкості обертової платформи при його суміщенні з відповідною локальною віссю обертання маховика, в результаті чого напрямок обертання маховика навколо відповідної локальної осі відповідає напрямку обертання повернутого вектора ![]() кутової швидкості.
кутової швидкості.
Текст
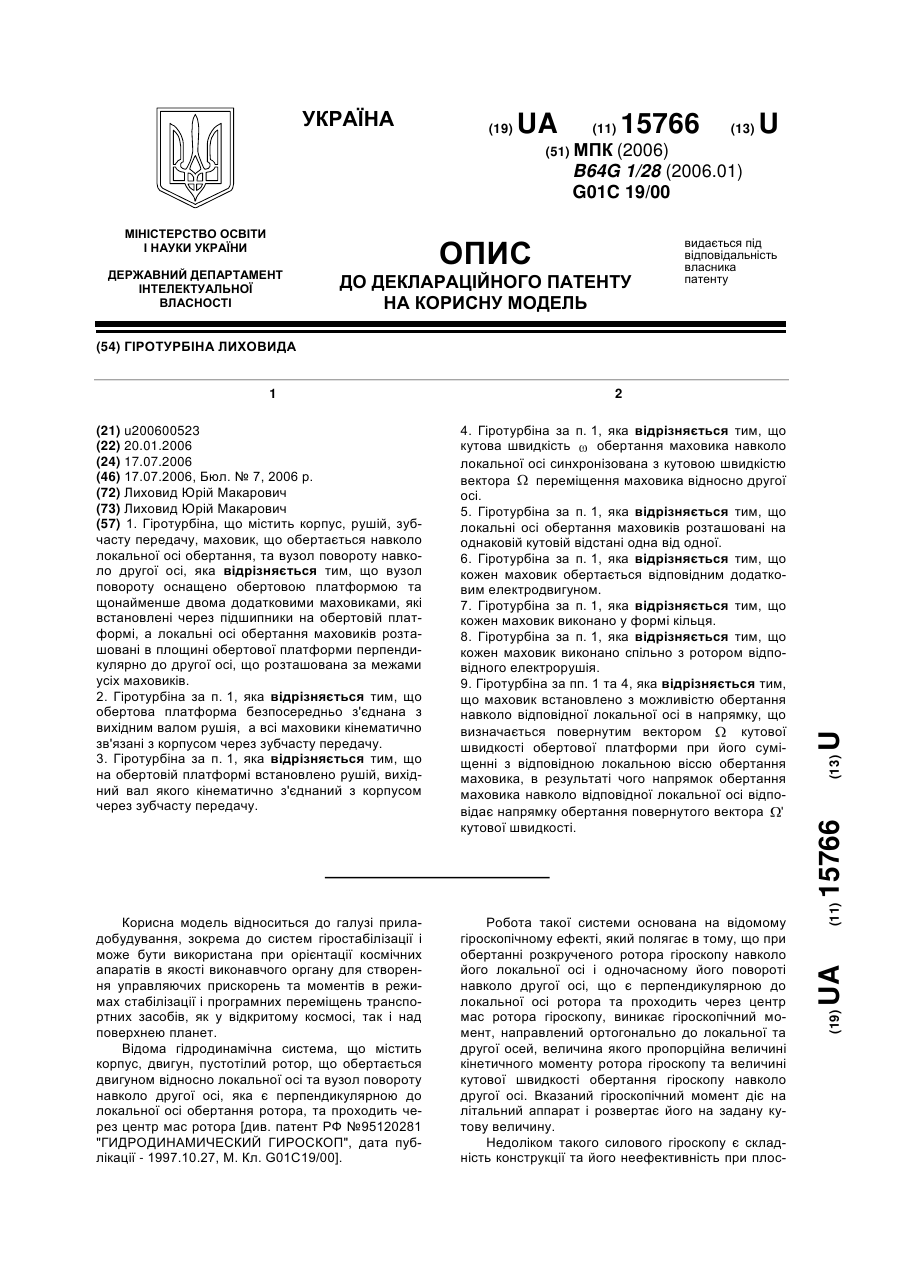
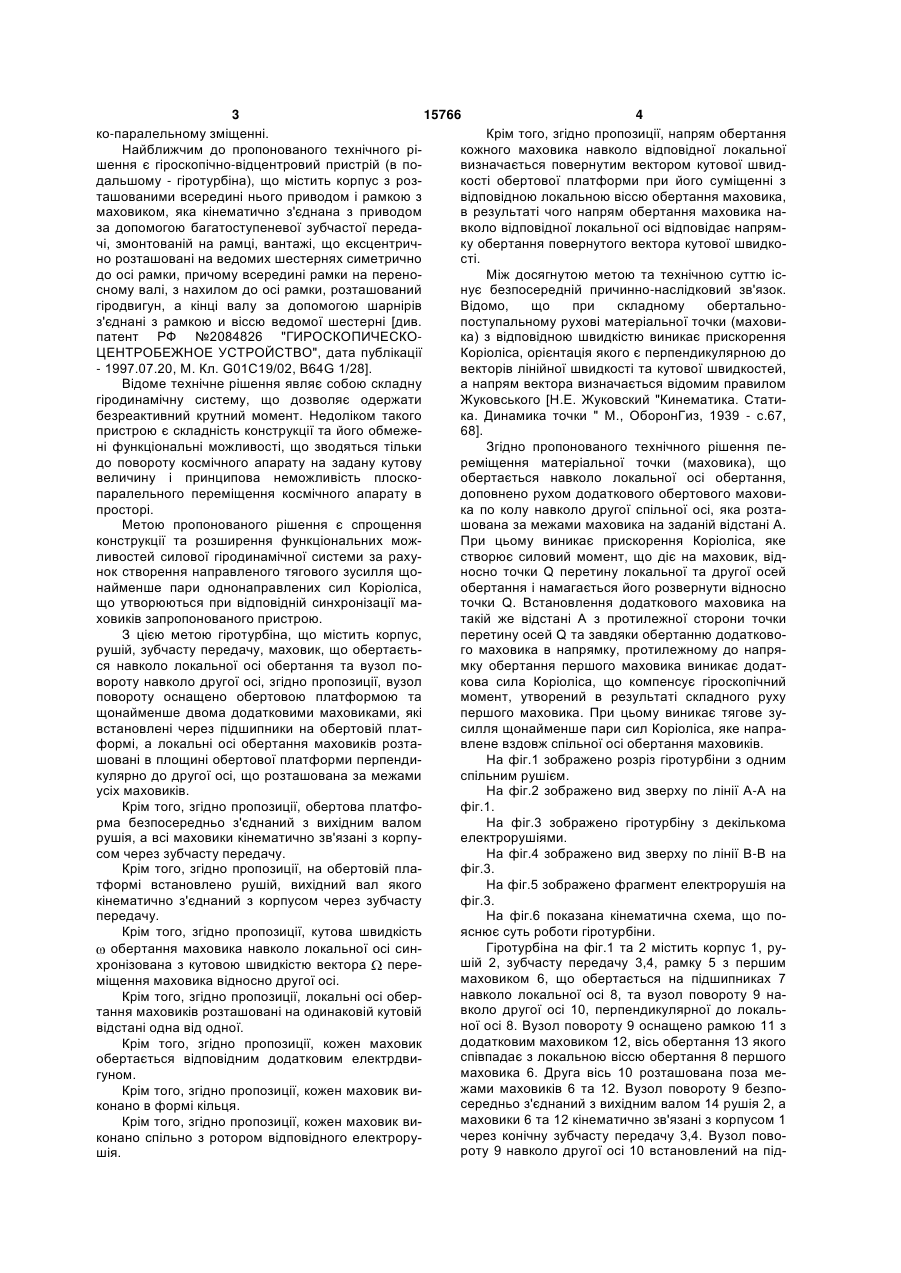
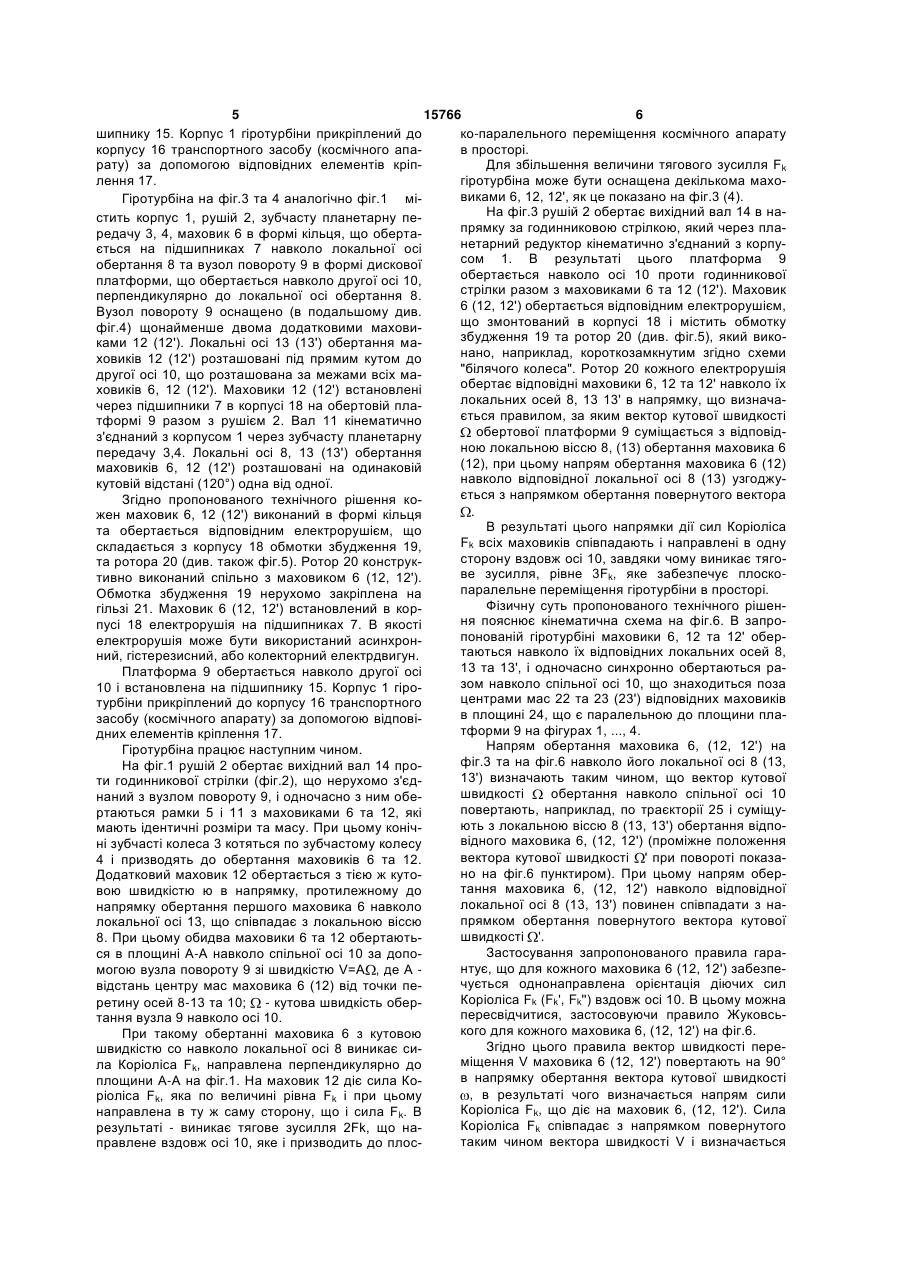
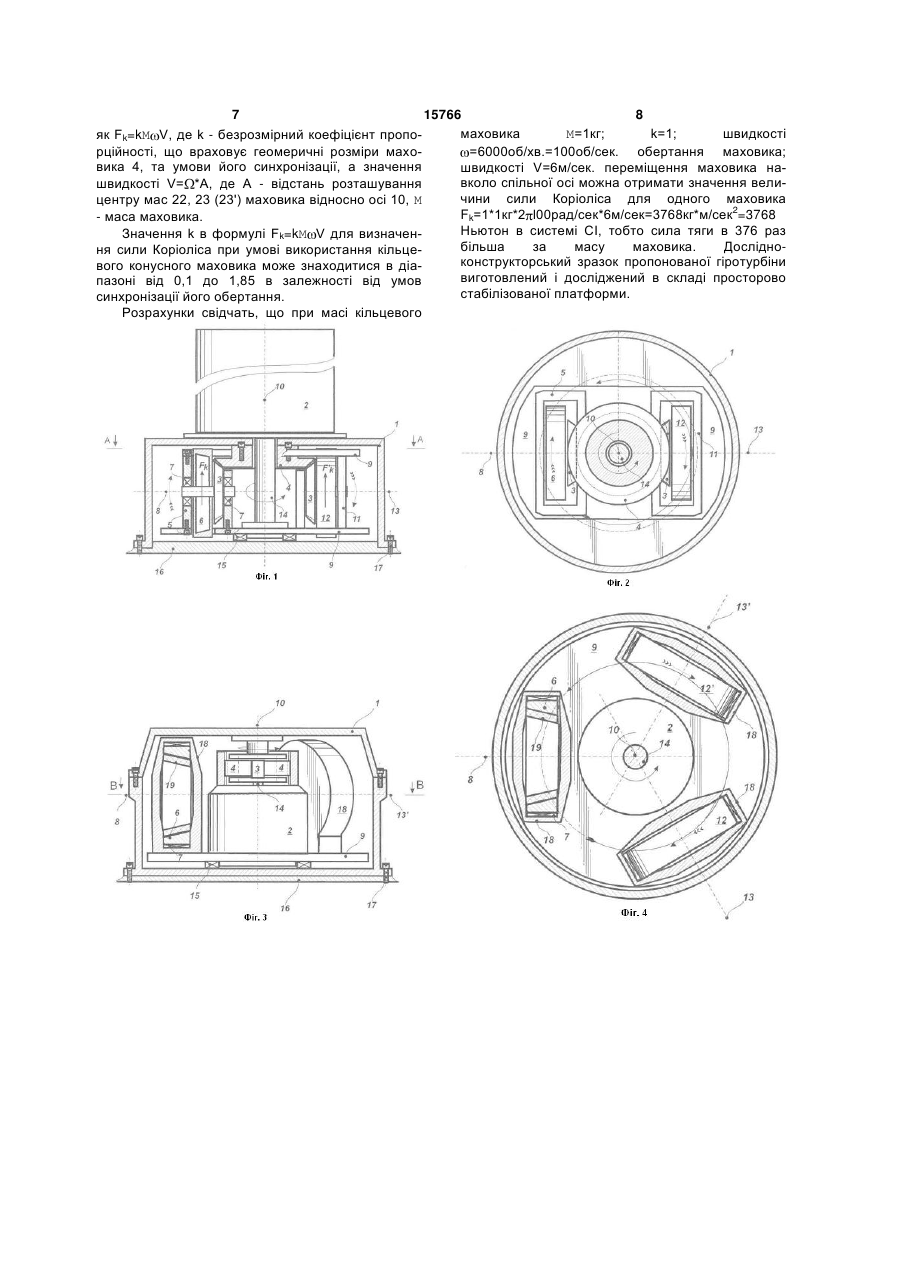
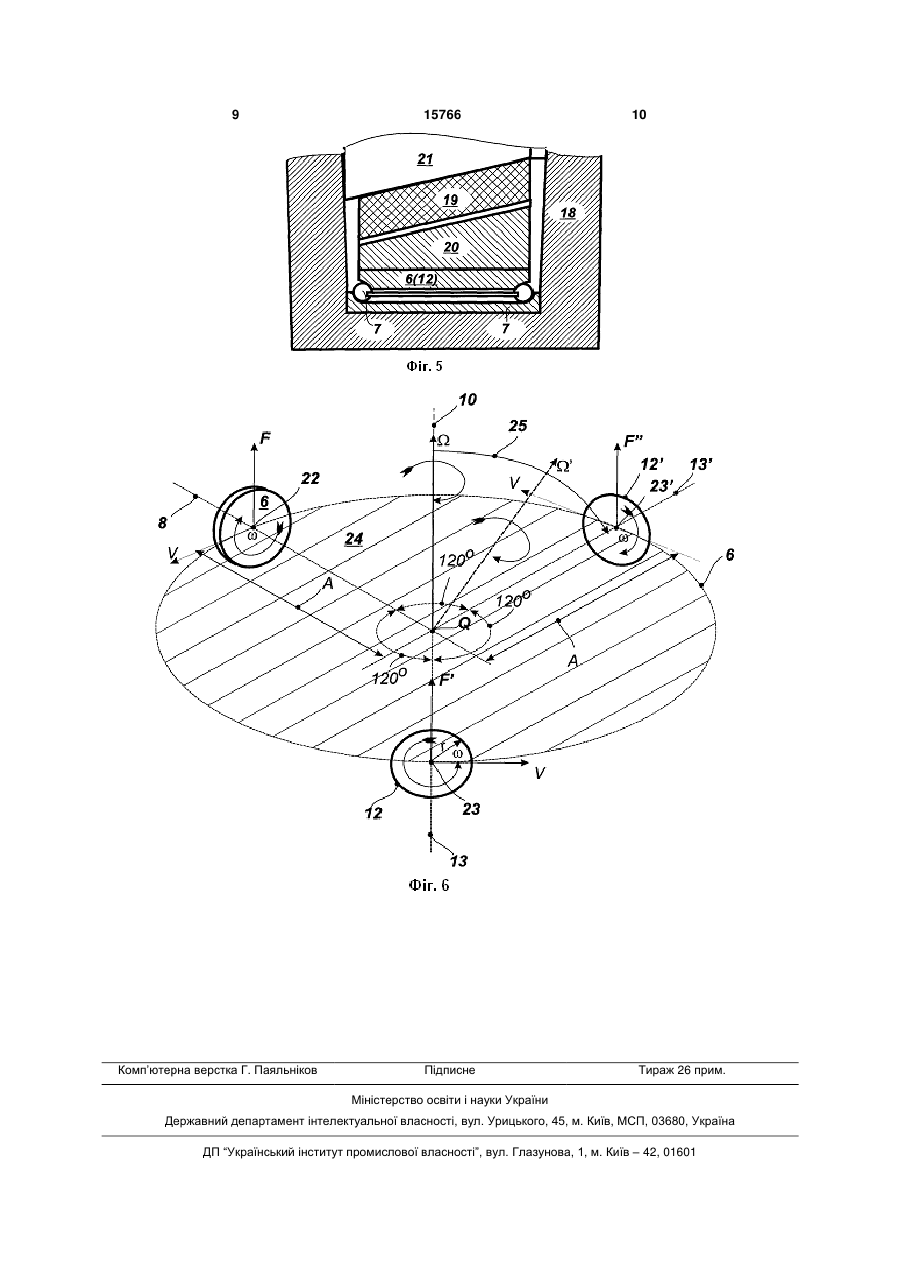
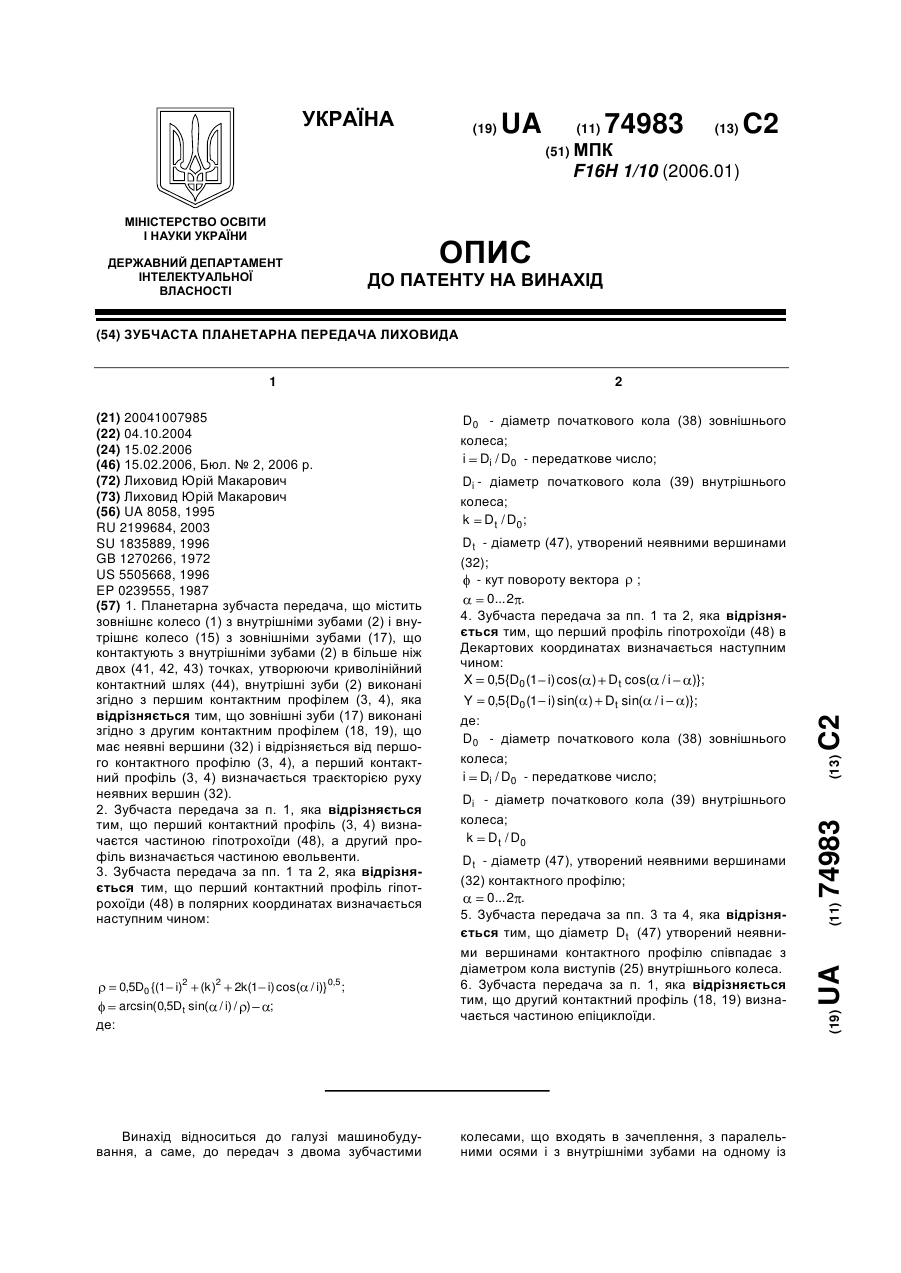
1. Гіротурбіна, що містить корпус, рушій, зубчасту передачу, маховик, що обертається навколо локальної осі обертання, та вузол повороту навколо другої осі, яка відрізняється тим, що вузол повороту оснащено обертовою платформою та щонайменше двома додатковими маховиками, які встановлені через підшипники на обертовій платформі, а локальні осі обертання маховиків розташовані в площині обертової платформи перпендикулярно до другої осі, що розташована за межами усіх маховиків. 2. Гіротурбіна за п. 1, яка відрізняється тим, що обертова платформа безпосередньо з'єднана з вихідним валом рушія, а всі маховики кінематично зв'язані з корпусом через зубчасту передачу. 3. Гіротурбіна за п. 1, яка відрізняється тим, що на обертовій платформі встановлено рушій, вихідний вал якого кінематично з'єднаний з корпусом через зубчасту передачу. U 2 (19) 1 3 15766 4 ко-паралельному зміщенні. Крім того, згідно пропозиції, напрям обертання Найближчим до пропонованого технічного рікожного маховика навколо відповідної локальної шення є гіроскопічно-відцентровий пристрій (в повизначається повернутим вектором кутової швиддальшому - гіротурбіна), що містить корпус з розкості обертової платформи при його суміщенні з ташованими всередині нього приводом і рамкою з відповідною локальною віссю обертання маховика, маховиком, яка кінематично з'єднана з приводом в результаті чого напрям обертання маховика наза допомогою багатоступеневої зубчастої передавколо відповідної локальної осі відповідає напрямчі, змонтованій на рамці, вантажі, що ексцентричку обертання повернутого вектора кутової швидконо розташовані на ведомих шестернях симетрично сті. до осі рамки, причому всередині рамки на переноМіж досягнутою метою та технічною суттю іссному валі, з нахилом до осі рамки, розташований нує безпосередній причинно-наслідковий зв'язок. гіродвигун, а кінці валу за допомогою шарнірів Відомо, що при складному обертальноз'єднані з рамкою и віссю ведомої шестерні [див. поступальному рухові матеріальної точки (маховипатент РФ №2084826 "ГИРОСКОПИЧЕСКОка) з відповідною швидкістю виникає прискорення ЦЕНТРОБЕЖНОЕ УСТРОЙСТВО", дата публікації Коріоліса, орієнтація якого є перпендикулярною до - 1997.07.20, М. Кл. G01C19/02, B64G 1/28]. векторів лінійної швидкості та кутової швидкостей, Відоме технічне рішення являє собою складну а напрям вектора визначається відомим правилом гіродинамічну систему, що дозволяє одержати Жуковського [Н.Е. Жуковский "Кинематика. Статибезреактивний крутний момент. Недоліком такого ка. Динамика точки " М., ОборонГиз, 1939 - с.67, пристрою є складність конструкції та його обмеже68]. ні функціональні можливості, що зводяться тільки Згідно пропонованого технічного рішення педо повороту космічного апарату на задану кутову реміщення матеріальної точки (маховика), що величину і принципова неможливість плоскообертається навколо локальної осі обертання, паралельного переміщення космічного апарату в доповнено рухом додаткового обертового маховипросторі. ка по колу навколо другої спільної осі, яка розтаМетою пропонованого рішення є спрощення шована за межами маховика на заданій відстані А. конструкції та розширення функціональних можПри цьому виникає прискорення Коріоліса, яке ливостей силової гіродинамічної системи за рахустворює силовий момент, що діє на маховик, віднок створення направленого тягового зусилля щоносно точки Q перетину локальної та другої осей найменше пари однонаправлених сил Коріоліса, обертання і намагається його розвернути відносно що утворюються при відповідній синхронізації маточки Q. Встановлення додаткового маховика на ховиків запропонованого пристрою. такій же відстані А з протилежної сторони точки З цією метою гіротурбіна, що містить корпус, перетину осей Q та завдяки обертанню додатковорушій, зубчасту передачу, маховик, що обертаєтьго маховика в напрямку, протилежному до напряся навколо локальної осі обертання та вузол помку обертання першого маховика виникає додатвороту навколо другої осі, згідно пропозиції, вузол кова сила Коріоліса, що компенсує гіроскопічний повороту оснащено обертовою платформою та момент, утворений в результаті складного руху щонайменше двома додатковими маховиками, які першого маховика. При цьому виникає тягове зувстановлені через підшипники на обертовій платсилля щонайменше пари сил Коріоліса, яке напраформі, а локальні осі обертання маховиків розтавлене вздовж спільної осі обертання маховиків. шовані в площині обертової платформи перпендиНа фіг.1 зображено розріз гіротурбіни з одним кулярно до другої осі, що розташована за межами спільним рушієм. усіх маховиків. На фіг.2 зображено вид зверху по лінії А-А на Крім того, згідно пропозиції, обертова платфофіг.1. рма безпосередньо з'єднаний з вихідним валом На фіг.3 зображено гіротурбіну з декількома рушія, а всі маховики кінематично зв'язані з корпуелектрорушіями. сом через зубчасту передачу. На фіг.4 зображено вид зверху по лінії В-В на Крім того, згідно пропозиції, на обертовій плафіг.3. тформі встановлено рушій, вихідний вал якого На фіг.5 зображено фрагмент електрорушія на кінематично з'єднаний з корпусом через зубчасту фіг.3. передачу. На фіг.6 показана кінематична схема, що поКрім того, згідно пропозиції, кутова швидкість яснює суть роботи гіротурбіни. Гіротурбіна на фіг.1 та 2 містить корпус 1, руобертання маховика навколо локальної осі синшій 2, зубчасту передачу 3,4, рамку 5 з першим хронізована з кутовою швидкістю вектора перемаховиком 6, що обертається на підшипниках 7 міщення маховика відносно другої осі. навколо локальної осі 8, та вузол повороту 9 наКрім того, згідно пропозиції, локальні осі обервколо другої осі 10, перпендикулярної до локальтання маховиків розташовані на одинаковій кутовій ної осі 8. Вузол повороту 9 оснащено рамкою 11 з відстані одна від одної. додатковим маховиком 12, вісь обертання 13 якого Крім того, згідно пропозиції, кожен маховик співпадає з локальною віссю обертання 8 першого обертається відповідним додатковим електрдвимаховика 6. Друга вісь 10 розташована поза мегуном. жами маховиків 6 та 12. Вузол повороту 9 безпоКрім того, згідно пропозиції, кожен маховик висередньо з'єднаний з вихідним валом 14 рушія 2, а конано в формі кільця. маховики 6 та 12 кінематично зв'язані з корпусом 1 Крім того, згідно пропозиції, кожен маховик вичерез конічну зубчасту передачу 3,4. Вузол повоконано спільно з ротором відповідного електроруроту 9 навколо другої осі 10 встановлений на підшія. 5 15766 6 шипнику 15. Корпус 1 гіротурбіни прикріплений до ко-паралельного переміщення космічного апарату корпусу 16 транспортного засобу (космічного апав просторі. рату) за допомогою відповідних елементів кріпДля збільшення величини тягового зусилля Fk лення 17. гіротурбіна може бути оснащена декількома маховиками 6, 12, 12', як це показано на фіг.3 (4). Гіротурбіна на фіг.3 та 4 аналогічно фіг.1 міНа фіг.3 рушій 2 обертає вихідний вал 14 в настить корпус 1, рушій 2, зубчасту планетарну пепрямку за годинниковою стрілкою, який через пларедачу 3, 4, маховик 6 в формі кільця, що обертанетарний редуктор кінематично з'єднаний з корпується на підшипниках 7 навколо локальної осі сом 1. В результаті цього платформа 9 обертання 8 та вузол повороту 9 в формі дискової обертається навколо осі 10 проти годинникової платформи, що обертається навколо другої осі 10, стрілки разом з маховиками 6 та 12 (12'). Маховик перпендикулярно до локальної осі обертання 8. 6 (12, 12') обертається відповідним електрорушієм, Вузол повороту 9 оснащено (в подальшому див. що змонтований в корпусі 18 і містить обмотку фіг.4) щонайменше двома додатковими маховизбудження 19 та ротор 20 (див. фіг.5), який викоками 12 (12'). Локальні осі 13 (13') обертання манано, наприклад, короткозамкнутим згідно схеми ховиків 12 (12') розташовані під прямим кутом до "білячого колеса". Ротор 20 кожного електрорушія другої осі 10, що розташована за межами всіх маобертає відповідні маховики 6, 12 та 12' навколо їх ховиків 6, 12 (12'). Маховики 12 (12') встановлені локальних осей 8, 13 13' в напрямку, що визначачерез підшипники 7 в корпусі 18 на обертовій плається правилом, за яким вектор кутової швидкості тформі 9 разом з рушієм 2. Вал 11 кінематично обертової платформи 9 суміщається з відповідз'єднаний з корпусом 1 через зубчасту планетарну ною локальною віссю 8, (13) обертання маховика 6 передачу 3,4. Локальні осі 8, 13 (13') обертання (12), при цьому напрям обертання маховика 6 (12) маховиків 6, 12 (12') розташовані на одинаковій навколо відповідної локальної осі 8 (13) узгоджукутовій відстані (120°) одна від одної. ється з напрямком обертання повернутого вектора Згідно пропонованого технічного рішення ко. жен маховик 6, 12 (12') виконаний в формі кільця В результаті цього напрямки дії сил Коріоліса та обертається відповідним електрорушієм, що Fk всіх маховиків співпадають і направлені в одну складається з корпусу 18 обмотки збудження 19, сторону вздовж осі 10, завдяки чому виникає тягота ротора 20 (див. також фіг.5). Ротор 20 конструкве зусилля, рівне 3Fk, яке забезпечує плоскотивно виконаний спільно з маховиком 6 (12, 12'). паралельне переміщення гіротурбіни в просторі. Обмотка збудження 19 нерухомо закріплена на Фізичну суть пропонованого технічного рішенгільзі 21. Маховик 6 (12, 12') встановлений в корня пояснює кінематична схема на фіг.6. В запропусі 18 електрорушія на підшипниках 7. В якості понованій гіротурбіні маховики 6, 12 та 12' оберелектрорушія може бути використаний асинхронтаються навколо їх відповідних локальних осей 8, ний, гістерезисний, або колекторний електрдвигун. 13 та 13', і одночасно синхронно обертаються раПлатформа 9 обертається навколо другої осі зом навколо спільної осі 10, що знаходиться поза 10 і встановлена на підшипнику 15. Корпус 1 гіроцентрами мас 22 та 23 (23') відповідних маховиків турбіни прикріплений до корпусу 16 транспортного в площині 24, що є паралельною до площини плазасобу (космічного апарату) за допомогою відповітформи 9 на фігурах 1, ..., 4. дних елементів кріплення 17. Напрям обертання маховика 6, (12, 12') на Гіротурбіна працює наступним чином. фіг.3 та на фіг.6 навколо його локальної осі 8 (13, На фіг.1 рушій 2 обертає вихідний вал 14 про13') визначають таким чином, що вектор кутової ти годинникової стрілки (фіг.2), що нерухомо з'єдшвидкості обертання навколо спільної осі 10 наний з вузлом повороту 9, і одночасно з ним обеповертають, наприклад, по траєкторії 25 і суміщуртаються рамки 5 і 11 з маховиками 6 та 12, які ють з локальною віссю 8 (13, 13') обертання відпомають ідентичні розміри та масу. При цьому конічвідного маховика 6, (12, 12') (проміжне положення ні зубчасті колеса 3 котяться по зубчастому колесу вектора кутової швидкості ' при повороті показа4 і призводять до обертання маховиків 6 та 12. но на фіг.6 пунктиром). При цьому напрям оберДодатковий маховик 12 обертається з тією ж кутотання маховика 6, (12, 12') навколо відповідної вою швидкістю ю в напрямку, протилежному до локальної осі 8 (13, 13') повинен співпадати з нанапрямку обертання першого маховика 6 навколо прямком обертання повернутого вектора кутової локальної осі 13, що співпадає з локальною віссю швидкості '. 8. При цьому обидва маховики 6 та 12 обертаютьЗастосування запропонованого правила гарася в площині А-А навколо спільної осі 10 за допонтує, що для кожного маховика 6 (12, 12') забезпемогою вузла повороту 9 зі швидкістю V=A , де А чується однонаправлена орієнтація діючих сил відстань центру мас маховика 6 (12) від точки пеКоріоліса Fk (Fk', Fk'') вздовж осі 10. В цьому можна ретину осей 8-13 та 10; - кутова швидкість оберпересвідчитися, застосовуючи правило Жуковсьтання вузла 9 навколо осі 10. кого для кожного маховика 6, (12, 12') на фіг.6. При такому обертанні маховика 6 з кутовою Згідно цього правила вектор швидкості перешвидкістю со навколо локальної осі 8 виникає симіщення V маховика 6 (12, 12') повертають на 90° ла Коріоліса Fk, направлена перпендикулярно до в напрямку обертання вектора кутової швидкості площини А-А на фіг.1. На маховик 12 діє сила Ко, в результаті чого визначається напрям сили ріоліса Fk, яка по величині рівна Fk і при цьому Коріоліса Fk, що діє на маховик 6, (12, 12'). Сила направлена в ту ж саму сторону, що і сила Fk. В Коріоліса Fk співпадає з напрямком повернутого результаті - виникає тягове зусилля 2Fk, що натаким чином вектора швидкості V і визначається правлене вздовж осі 10, яке і призводить до плос 7 15766 8 маховика M=1кг; k=1; швидкості як Fk=kM V, де k - безрозмірний коефіцієнт пропорційності, що враховує геомеричні розміри махо=6000об/хв.=100об/сек. обертання маховика; вика 4, та умови його синхронізації, а значення швидкості V=6м/сек. переміщення маховика навколо спільної осі можна отримати значення велишвидкості V= *A, де А - відстань розташування чини сили Коріоліса для одного маховика центру мас 22, 23 (23') маховика відносно осі 10, M Fk=1*1кг*2 l00paд/ceк*6м/сек=3768кг*м/сек2=3768 - маса маховика. Ньютон в системі СІ, тобто сила тяги в 376 раз Значення k в формулі Fk=kM V для визначенбільша за масу маховика. Дослідноня сили Коріоліса при умові використання кільцеконструкторський зразок пропонованої гіротурбіни вого конусного маховика може знаходитися в діавиготовлений і досліджений в складі просторово пазоні від 0,1 до 1,85 в залежності від умов стабілізованої платформи. синхронізації його обертання. Розрахунки свідчать, що при масі кільцевого 9 Комп’ютерна верстка Г. Паяльніков 15766 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLykhovyd gyro-turbine
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюГиротурбина лиховида
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: G01C 19/00, B64G 1/28
Мітки: лиховида, гіротурбіна
Код посилання
<a href="https://ua.patents.su/5-15766-giroturbina-likhovida.html" target="_blank" rel="follow" title="База патентів України">Гіротурбіна лиховида</a>
Зубчаста планетарна передача лиховида
Номер патенту: 74983
Опубліковано: 15.02.2006
Автор: Лиховид Юрій Макарович
МПК: F16H 1/10
Мітки: планетарна, передача, зубчаста, лиховида
Формула / Реферат:
1. Планетарна зубчаста передача, що містить зовнішнє колесо (1) з внутрішніми зубами (2) і внутрішнє колесо (15) з зовнішніми зубами (17), що контактують з внутрішніми зубами (2) в більше ніж двох (41, 42, 43) точках, утворюючи криволінійний контактний шлях (44), внутрішні зуби (2) виконані згідно з першим контактним профілем (3, 4), яка відрізняється тим, що зовнішні зуби (17) виконані згідно з другим контактним профілем (18, 19), що має...
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: спосіб, гіромоменту, компенсації
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Варіатор юрківа
Номер патенту: 52788
Опубліковано: 15.01.2003
Автор: Юрків Василь Федорович
МПК: F16H 15/00
Формула / Реферат:
Варіатор, який містить маховики, вхідний і вихідний вали, на одному з яких закріплено центральне коло, а на другому - водило з сателітами, який відрізняється тим, що сателіти споряджені кривошипами, пальці яких кінематично зв’язані з маховиками, поворотно посадженими на вхідному валу варіатора.
Установка для визначення експлуатаційних властивостей мастильних матеріалів
Номер патенту: 52875
Опубліковано: 15.01.2003
Автори: Ребенко Віктор Іванович, Ревенко Іван Іванович, Ребенко Іван Максимович
МПК: G01N 33/26, G01N 19/02, G01N 33/22
Мітки: матеріалів, мастильних, установка, експлуатаційних, властивостей, визначення
Формула / Реферат:
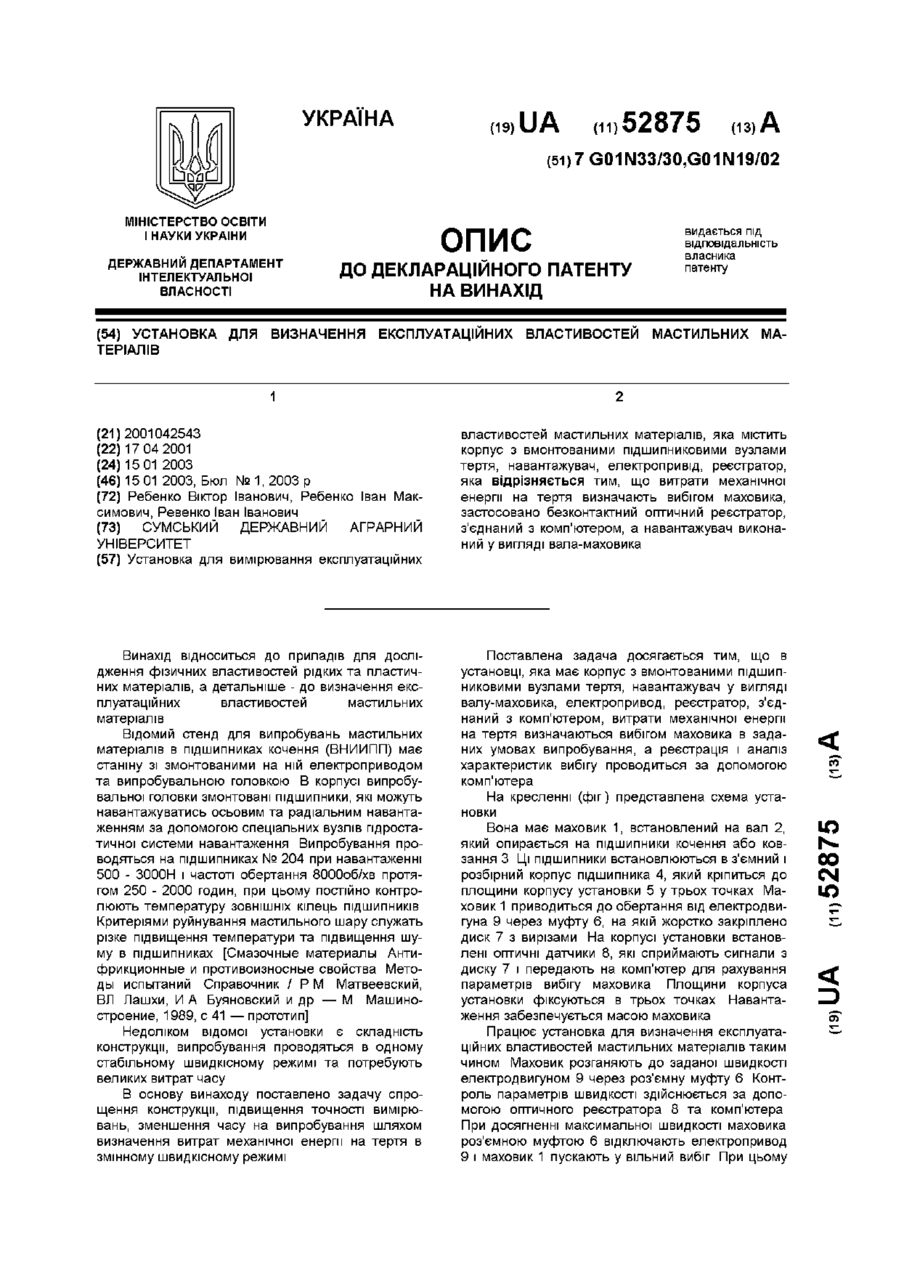
Установка для вимірювання експлуатаційних властивостей мастильних матеріалів, яка містить корпус з вмонтованими підшипниковими вузлами тертя, навантажувач, електропривід, реєстратор, яка відрізняється тим, що витрати механічної енергії на тертя визначають вибігом маховика, застосовано безконтактний оптичний реєстратор, з'єднаний з комп'ютером, а навантажувач виконаний у вигляді вала-маховика.
Прилад для знімання прочосу на чесальній машині
Номер патенту: 38771
Опубліковано: 15.05.2001
Автори: Ткаченко Марія Ігорівна, Ткаченко Ігор Валентинович, Гаврилов Костянтин Олексійович, Гаврилова Ганна Миколаївна
МПК: D01G 15/00
Мітки: знімання, прилад, машини, прочосу, чесальній
Формула / Реферат:
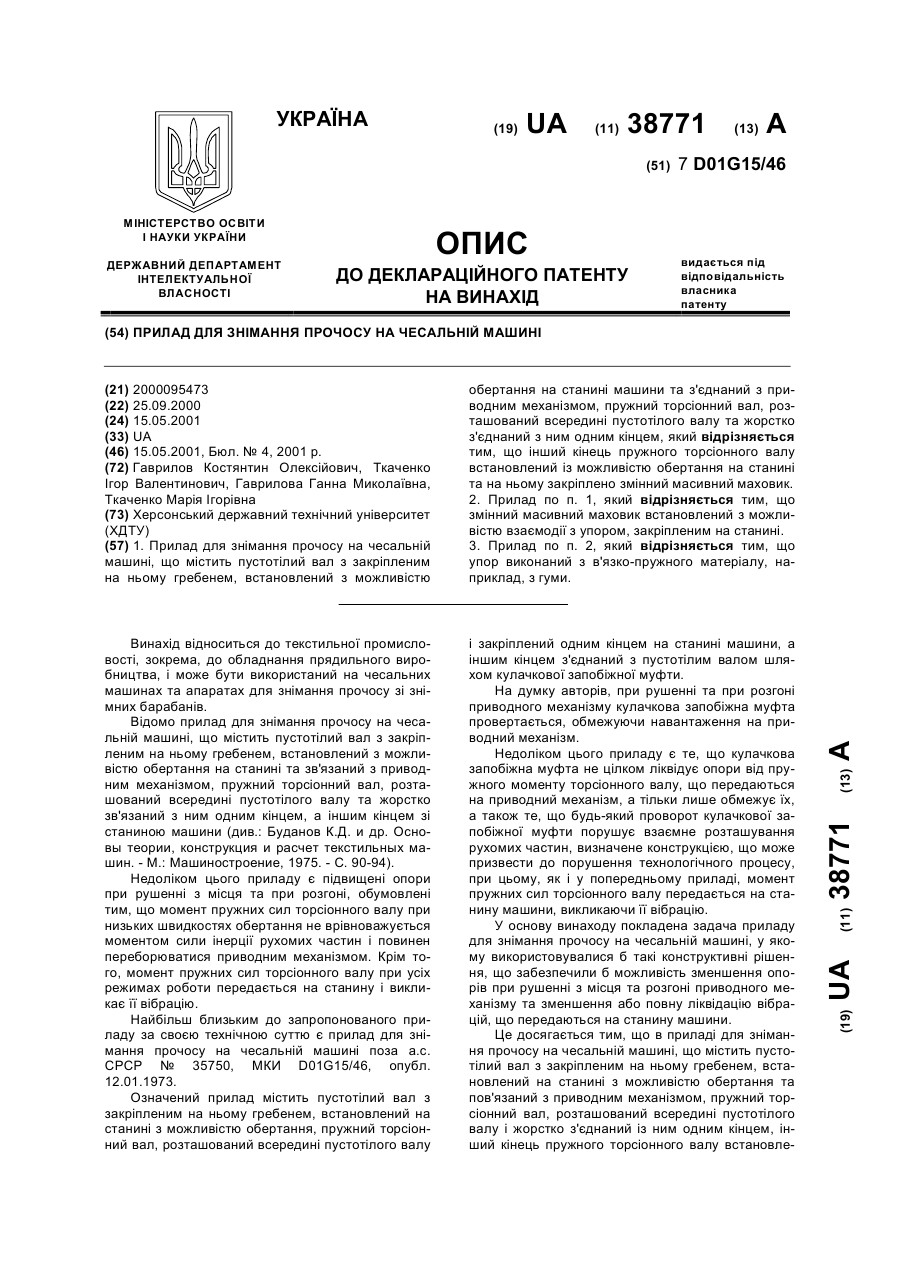
1. Прилад для знімання прочосу на чесальній машині, що містить пустотілий вал з закріпленим на ньому гребнем, встановлений з можливістю обертання на станині машини та з'єднаний з привідним механізмом, пружний торсіоний вал, розташований всередині пустотілого валу та жорстко з'єднаний з ним одним кінцем, який відрізняється тим, що іншийкінець пружнього торсіоного валу встановлений із можливістю обертання на станині та на ньому закріплено...
Попередній патент: Спосіб компенсації гіромоменту
Наступний патент: Гіротурбінний транспортний засіб
Випадковий патент: Мультифункціональне військово-похідне спорядження