Силова гіродинамічна система “гіротурбіна”
Формула / Реферат
1. Силова гіродинамічна система, що містить корпус, рушій, вузол повороту для здійснення примусової прецесії, який кінематично зв’язаний з рушієм, маховики, що розташовані навколо осі прецесії і встановлені з можливістю обертання в різних напрямках навколо відповідної локальної осі обертання маховика, при цьому всі маховики закріплені в вузлі повороту з можливістю переміщення навколо осі прецесії, яка відрізняється тим, що вузол повороту оснащений обертовою платформою, кожний маховик встановлений на обертовій платформі з можливістю синхронізації кутової швидкості ω обертання маховика навколо відповідної локальної осі з кутовою швидкістю Ω переміщення маховика навколо осі прецесії, причому кожний маховик виконаний за формою зрізаного конуса, вершина якого направлена в бік перетину локальної осі з віссю прецесії.
2. Силова гіродинамічна система за п. 1, яка відрізняєтъся тим, що як засіб синхронізації обертання маховиків використана зубчаста передача, яка кінематично з’єднує кожний маховик з корпусом.
3. Силова гіродинамічна система за п. 1, яка відрізняєтъся тим, що на обертовій платформі встановлене непарне число маховиків.
Текст
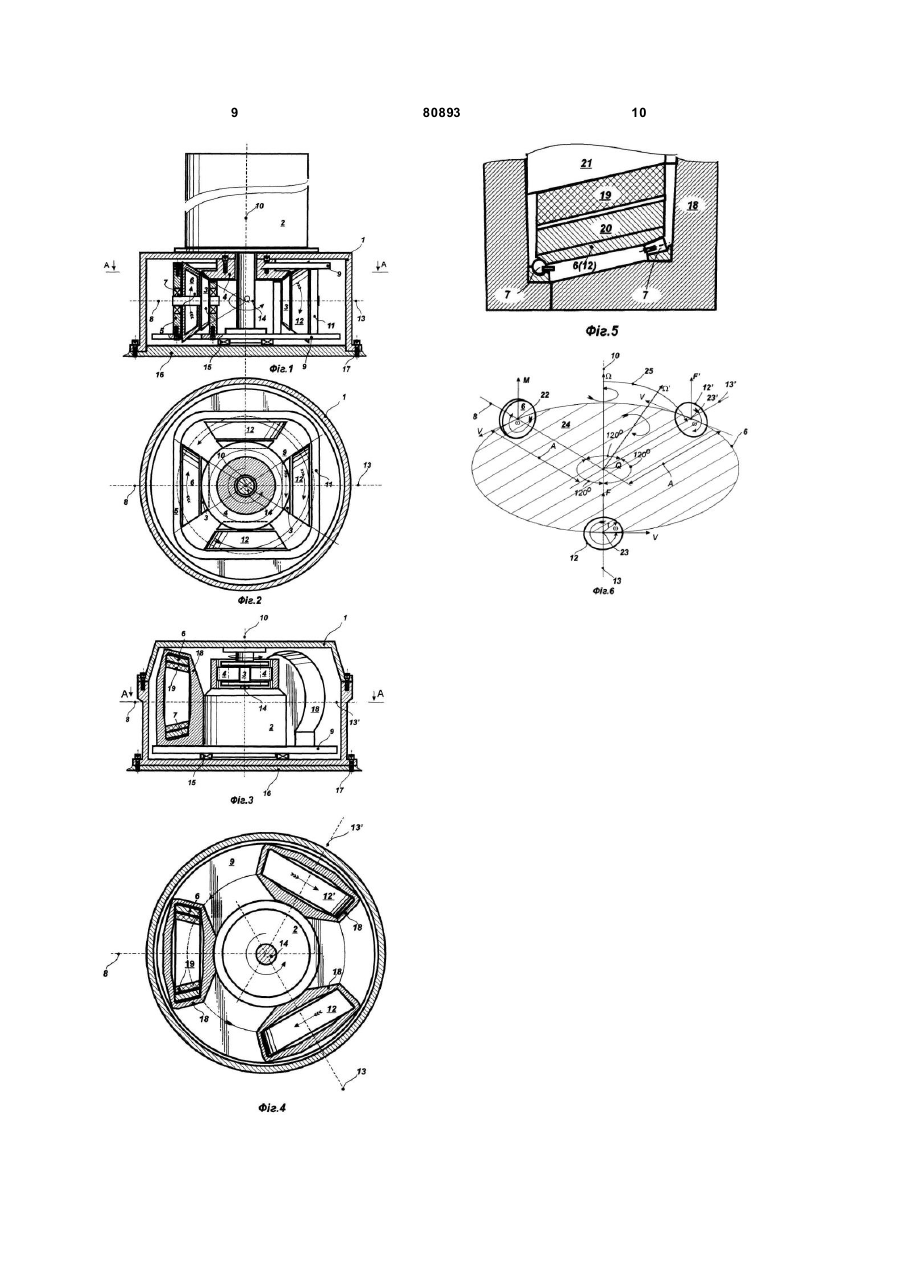
1. Силова гіродинамічна система, що містить корпус, рушій, вузол повороту для здійснення примусової прецесії, який кінематично зв’язаний з рушієм, маховики, що розташовані навколо осі прецесії і встановлені з можливістю обертання в різних напрямках навколо відповідної локальної осі обертання маховика, при цьому всі маховики закріплені в вузлі повороту з можливістю переміщення навколо осі прецесії, яка відрізняє ться тим, що вузол повороту оснащений 3 80893 Відоме технічне рішення являє собою гіродинамічну систему, що дозволяє одержати безреактивний крутний момент. Недоліком такого пристрою є складність конструкції та його обмежені функціональні можливості, що зводяться тільки до повороту космічного апарата на задану кутову величину і принципова неможливість плоско-паралельного переміщення космічного апаратів просторі за допомогою відомого пристрою. Найбільш близьким до пропонованого технічного рішення є поштовховий гірокопічний апарат, що містить перший вал для обертання навколо осі прецесії, парне число мас, розташованих і приєднаних в основному ортогонально до вказаного валу, вказані маси розташовані діаметрально, кожна маса має можливість обертатися в різних напрямках навколо відповідної осі обертання маси, а маси мають можливість обертатися навколо осі прецесії. Апарат містить також зворотнопоступальний пристрій руху мас, зв’язаний з кожною масою для забезпечення зворотнопоступального прямолінійного руху мас під час обертання мас навколо осі прецесії, поштовховий опорний механізм, приєднаний до вказаного першого валу для передачі поштовху аксіально вздовж осі вказаного першого валу під час обертання мас навколо осі прецесії [див. РСТ публікація WO8 8/043 64 "Gyroscopic thrust apparatus"]. Відоме технічне рішення являє собою складну гіроскопічну систему, що дозволяє одержати імпульсне зусилля поштовху, направлене вздовж осі прецесії. Присутній в відомому апараті зворотно-поступальний механізм (reciprocating means) періодично відхиляє в вертикальній площині обертові маси, в результаті чого створюється штучна їх н утація (тобто махові рухи мас до осі примусової прецесії та від неї разом з їх обертанням навколо локальних осей та з примусовою прецесією навколо осі прецесії). Характерною особливістю відомого гіроскопічного апаратур те, що в процесі його функціонування створюється періодичне (імпульсне) тягове вертикальне зусилля вздовж осі примусової прецесії, частота якого визначається роботою зворотно-поступального механізму. Це призводить до значних вібрацій в вертикальному напрямку з частотою 100-1000Гц вздовж осі примусової прецесії. Частота вібрацій негативно впливає на надійність відомого апарата та на екіпаж такого апарата. Крім того, ефективність відомого гіроскопічного апарат/ є недостатньо високою. Так, наприклад, при вазі робочої маси 1000г тягове зусилля відомого апарата складає 0.1-0.5Н (Ньютон) за рахунок того, що тільки в деякі дуже короткі моменти часу рух робочих мас призводить до появи вертикальних сил гіроскопічного моменту, що діють на робочі маси вздовж осі прецесії. Це звужує функціональні можливості використання відомого гіроскопічного апарата, який може знаходити застосування для переміщення космічних апаратів лише в умовах мікро-гравітації. Зворотно-поступальній механізм 4 відхилення є складним технічним засобом, що включає ковзні напрямні, кулачкові штовхачі, карданні вильчаті вали та систему тяг. В результаті цього на практиці неможливо створити гіроскопічний аппарат, що містить більше ніж дві робочі маси. Метою пропонованого рішення є спрощення конструкції, підвищення надійності, усунення вібрацій та розширення функціональних можливостей силової гіродинамічної системи за рахунок створення направленого тягового зусилля щонайменше пари однонаправлених сил Коріоліса, які утворюються при відповідній синхронізації кутової швидкості обертання робочих мас гіродинамічної системи навколо відповідних локальних осей з кутовою швидкістью обертання робочих мас навколо спільної осі прецесії. З цією метою силова гіродинамічна система, що містить корпус, рушій, вузол повороту для здійснення примусової прецесії, який кінематичне зв’язаний з рушієм, маховики, що розташовані навколо осі прецесії і встановлені з можливістю обертання в різних напрямках навколо відповідної локальної осі обертання маховика, всі маховики закріплені в вузлі повороту з можливістю обертання навколо осі прецесії згідно пропозиції удоcконалена таким чином, що вузол повороту оснащений обертовою платформою, кожен маховик встановлений на обертовій платформі з можливістю синхронізації кутової швидкості ω обертання маховика навколо локальної осі з кутовою швидкістю Ω переміщення маховика навколо осі прецесії, причому кожен маховик виконане* в формі зрізаного конуса, вершина якого направлена в бік перетину локальної осі з віссю прецесії. Крім того, згідно пропозиції як засіб синхронізації обертання маховиків використано зубчасту передачу, що кінематичне з'єднує кожен маховик з корпусом. Крім того, згідно пропозиції на обертовій платформі встановлено непарне число маховиків. Між досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв"язок. Відомо, що при складному обертальнопоступальному рухові матеріальної точки (маховика) з відповідною швидкістю виникає прискорення Коріоліса, орієнтація якого є перпендикулярною до векторів лінійної швидкості та кутової швидкостей, а напрям вектору визначається відомим правилом Жуковського. Згідно пропонованого технічного рішення лінійне переміщення матеріальної точки (маховика), що обертається навколо локальної осі обертання, доповнено синхронним рухом іншого обертового тіла по колу навколо спільної осі прецесії, яка розташована за межами маховиків на заданій відстані. При цьому виникає резонанс інерційних сил (сил Коріоліса та відцентрових сил), який створює значний силовий момент, що діє на маховики. В результаті - створюється значне безперервне (неімпульсне) тягове зусилля щонайменше пари сил Коріоліса, яке направлене вздовж спільної осі прецесії маховиків. Синхронізація обертання маховиків навколо 5 80893 локальних осей з обертанням навколо осі примусової прецесії в найпростішому випадку здійснюється зубчастою передачею, що кінематичне з’єднує кожен маховик з корпусом. Непарне число маховиків, встановлених на обертовій платформі, забезпечує підвищену стійкість гіродинамічної системи. На Фіг.1 зображено розріз механічного варіанту пропонованой силової гіродинамічної системи. На Фіг.2 зображено вид зверху по лінії А-А системи згідно Фіг.1. На Фіг.3 зображено електро-механічний варіант пропонованой силової гіродинамічної системи в розрізі. На Фіг.4 зображено вид зверху по лінії В-В системи на Фіг.3. На Фіг.5 зображено фрагмент електрорушія на Фіг.3. На Фіг.6 показана кінематична схема, що пояснює суть пропонованого технічного рішення. Силова гіродинамічна система на Фігурах 1 та 2 містить корпус 1, рушій 2, зубчасту передачу 3,4, рамку 5 з першим маховиком 6, що обертається на підшипниках 7 навколо локальної осі 8, та вузол повороту 9 навколо осі прецесії 10 в формі обертової дискової платформи. Вузол повороту 9 оснащено рамкою 11 з маховиком 12, що встановлений з можливістю обертання навколо локальної осі 13. Вісь 10 примусової прецесії розташована поза межами маховиків 6,12 на заданій відстані. Вузол повороту 9 безпосередньо з'єднаний з вихідним валом 14 рушія 2, а маховики 6 та 12 кінематичне зв'язані з корпусом 1 через зубчасту передачу 3,4. Вузол повороту 9 навколо другої осі 10 встановлений на підшипнику 15. Корпус 1 силової гіродинамічної системи прикріплений до корпусу 16 транспортного засобу за допомогою відповідних елементів кріплення 17. Кожен маховик 6 (12) виконано в формі конусного кільця, вершина якого направлена в точку Q перетину відповідної локальної осі 8 (13) з віссю прецесії 10. Рушій 2 може бути виконаний як двигун внутрішнього згоряння. Силова гіродинамічна система на Фігурах 3 та 4 аналогічно Фіг.1 містить корпус 1, рушій 2, зубчасту передачу 3,4, маховик 6 в формі конусного кільця, що встановлено з можливістю обертання на підшипниках 7 навколо локальної осі обертання 8 та вузол повороту 9 в формі дискової обертової платформи, що обертається навколо осі прецесії 10, перпендикулярно до локальної осі обертання 8. Вузол повороту 9 оснащено (в подальшому див. Фіг.4) непарним числом ідентичних маховиків (щонайменше трьома) 6,12 (12'), локальні осі 13 (13') обертання яких розташовані на одинаковій кутовій відстані 120° одна від одної навколо осі прецесії 10, що розташована за межами усіх маховиків 6, 12 (12') на заданій (не довільній) відстані. Ма ховики 12 (12') встановлені через підшипники 7 в корпусі електрорушія 18 на дисковій обертовій платформі 9 разом з рушієм 2, вал 14 рушія 2 кінематично з'єднаний з корпусом 1 через зубчасту планетарну передачу 3,4. Згідно пропонованого технічного 6 рішення кожен маховик 6, 12 (12') обертається відповідним електрорушієм, який складається з корпусу 18, обмотки збудження 19, та ротора 20 (див. також Фіг.5), що конструктивно виконаний спільно з маховиком 6 (12,12'). Обмотка збудження 19 нерухомо закріплена на гільзі 21. Маховик 6 (12,12') встановлений в корпусі 18 електрорушія на підшипниках 7. В якості електрорушія 18 може бути використаний гістерезісний, синхронний або асинхронний електричний двигун. Дискова платформа 9 обертається навколо осі прецесії 10 і встановлена в підшипнику 15. Корпус 1 силової гіродинамічної системи прикріплений до корпусу 16 транспортного засобу за допомогою відповідних елементів кріплення 17. Силова гіродинамічна система працює наступним чином. На Фіг.1 рушій 2 обертає вихідний вал 14 проти годинникової стрілки (Фіг.2), що нерухомо з'єднаний з вузлом повороту 9 в формі дискової платформи, яка обертається синхронно з валом 14 навколо осі 10. Синхронно з валом 14 при цьому переміщуються навколо осі 10 рамки 5 - 11 з маховиками 6 та 12, які мають ідентичні розміри та масу. При обертанні вузла повороту 9 конічні зубчасті колеса 3 котяться по нерухомому зубчастому колесу 4 і обертаються разом з маховиками 6 та 12. За рахунок зубчастої передачі 3,4 відбувається синхронізація обертання маховиків 6, 12 навколо локальних осей 8, 13 та їх обертання навколо другої осі 10. Ма ховик 12 обертається при цьому з тією ж кутовою швидкістю ω, що і маховик 6, але в напрямку, протилежному до напрямку обертання першого маховика 6 навколо локальної осі 8. Обидва маховики 6 та 12 виконують примусову прецесію в площині А-А навколо осі прецесії 10 за допомогою вузла повороту 9 з постійною кутовою швидкістю Ω. Наприклад, при швидкості Ω обертання вихідного валу 14 р ушія 3000об./хв платформа 9 обертається з тією ж кутовою швидкістью, а швидкість обертання маховиків 6 та 12 визначається передатним відношенням i=ω/Ω конусної зубчастої передачі 3,4. При цілому передатному числу і=2 значення кутової швидкості ω обертання маховика 6 (12) становить 6000об/хв. При збільшенні кутової швидкості вихідного валу рушія 2 синхронно збільшується і кутова швидкість обертання маховиків навколо локальних осей 8,13. При обертанні маховика 6 з кутовою швидкістю ω навколо локальної осі 8 виникає сила Коріоліса Fk, направлена перпендикулярно до площини А-А на Фіг.1. На маховик 12 діє сила Коріоліса Fk, яка по величині рівна Fk і при цьму направлена в ту ж саму сторону, що і сила F k. В результаті - виникає тягове зусилля 2Fk, що направлене вздовж осі 10, яке і призводить до плоско-паралельного переміщення апарата в просторі. Для збільшення величини тягового зусилля Fie силова гіродинамічна система може бути оснащена декількома маховиками 6,12,12', як це показано на Фіг.3 (4). На Фіг.3 рушій 2 обертає вихідний вал 14 в напрямку за годинниковою стрілкою, який через планетарний редуктор 3,4 кінематично з'єднаний з 7 80893 корпусом 1 силової гіродинамічної системи. Швидкість обертання вихідного валу 14 рушія 2 становить для прикладу 3000об./хв. В результаті обертання вихідного валу 14 платформа 9 обертається навколо осі 10 проти годинникової стрілки разом з рушієм 2 та маховиками 6, 12, (12') з постійною кутовою швидкістю Ω. Маховики 6, 12 та 12' обертаються відповідним електродвигуном, що змонтований в корпусі 18 і містить обмотку збудження 19 та ротор 20 (див. також Фіг.5). Ротор 20 може бути виконано, наприклад, короткозамкнутим згідно схеми "білячого колеса". Ротор 20 кожного електрорушія обертає відповідні маховики 6, 12 та 12' навколо їх локальних осей 8,13,13' в напрямку, що визначається запропонованим правилом, за яким вектор кутової швидкості Ω обертової платформи 9 умовно суміщається з відповідною локальною віссю 8, (13) обертання маховика, при цьому напрям обертання маховика навколо відповідної локальної осі 8, 13, 13' співпадає з напрямком обертання повернутого вектора Ω. Вданому випадку всі маховики обертаються з одинаковою кутовою швидкістю ω, що становить, наприклад, 1000об/хв. Завдяки зубчастій планетарній передачі 3,4 швидкість обертання Ω навколо осі примусової прецесії 10 синхронізується зі швидкістю обертання ω кожного маховика навколо локальної осі за рахунок вибору передатного відношення і планетаної зубчастої передачі 3,4. Наприклад, при значенні і=3, швидкість обертання Ω платформи 9 становить 3000об/хв/i =1000об/хв, що дорівнює швидкості обертання маховиків 6,12 та 12'. В результаті цього напрямки сил Коріоліса Fk всіх маховиків співпадають і направлені в одну сторону вздовж осі 10, причому виникає значне тягове зусилля, рівне 3Fk, яке забезпечує плоскопаралельне переміщення силової гіродинамічної системи в просторі. Фізичну суть пропонованого технічного рішення пояснює кінематична схема на Фіг.6. В запропонованій силовій гіродинамічній системі маховики 6, 12 та 12' обертаються навколо їх відповідних локальних осей 8, 13 та 13', і одночасно синхронно обертаються разом навколо спільної осі прецесії 10, що знаходиться поза центрами мас 22 та 23 (23') відповідних маховиків в площині 24, яка є паралельною до площини платформи 9 на фігурах 1,...,4. Переносна швидкість V маховиків 6, 12 та 12' визначається як V=ΑΩ, де Ω- швидкість обертання маховиків навколо спільної осі 10; А - задана відстань центрів мас 22, 23 (23') відповідного маховика від осі 10. Напрям обертання кожного маховика 6, 12(12') на Фіг.3 та на Фіг.6 навколо його локальної осі 8, 13 (13') визначають таким чином, що вектор кутової швидкості Ω обертання навколо спільної осі 10 умовно повертають на 90°, наприклад, по траєкторії 25 і суміщують з відповідною локальною віссю 8, 13 (13') обертання відповідного маховика 6, 12 (12') (проміжне положення вектора кутової швидкості Ω' при його повороті показано на Фіг.6 пунктиром). При цьому напрям обертання відповідної локальної осі 8, 13 (13') повинен 8 співпадати з напрямком обертання повернутого вектора кутової швидкості Ω'. Застосування запропонованого правила гарантує, що для кожного маховика 6, 12 (12') забезпечується однонаправлена орієнтація діючих сил Коріоліса Fk, F k' Fk" вздовж осі 10 вверх. В цьому можна пересвідчитися, застосовуючи відоме правило Жуковського для кожного маховика 6,12 (12'). Згідно правила Жуковського вектор швидкості переміщення V маховика умовно повертають на 90° в напрямку обертання вектора кутової швидкості ω, в результаті чого визначається напрям дії сили Коріоліса Fk на маховик 6, 12 (12'). Сила Коріоліса Fk співпадає з напрямком повернутого таким чином вектора швидкості V і визначається як Fk=kMwV, де k - безрозмірний коефіцієнт пропорційності, що враховує геометричні розміри маховика 4 та умови синхронізації його обертання навколо локальної осі з обертанням навколо осі прецесії 10; М- маса маховика. Розрахунки та експериментальні дані свідчать, що при масі кільцевого маховика М=1кг; к=0.5; при швидкості обертання маховика w=6000об/хв=100об./сек; швидкості переміщення маховиків навколо спільної осі прецесії У=6м/сек можна отримати значення сили Коріоліса для одного маховика Р=0.5*1кг*100об/хв*6м/сек = 300кг*м/сек 2=300Ньютон в системі СІ, тобто сила тяги в 30 раз більша ніж власна маса маховика. Дослідно-конструкторський зразок пропонованої силової гіродинамічної системи виготовлений і досліджений в складі просторово стабілізованої платформи. 9 80893 10
ДивитисяДодаткова інформація
Назва патенту англійськоюPower gyrodynamic system "gyroturbine"
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСиловая гиродинамическая система «гиротурбина»
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: G01C 19/00, B64G 1/28
Мітки: гіродинамічна, система, силова, гіротурбіна
Код посилання
<a href="https://ua.patents.su/5-80893-silova-girodinamichna-sistema-giroturbina.html" target="_blank" rel="follow" title="База патентів України">Силова гіродинамічна система “гіротурбіна”</a>
Гіротурбіна лиховида
Номер патенту: 15766
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: лиховида, гіротурбіна
Формула / Реферат:
1. Гіротурбіна, що містить корпус, рушій, зубчасту передачу, маховик, що обертається навколо локальної осі обертання, та вузол повороту навколо другої осі, яка відрізняється тим, що вузол повороту оснащено обертовою платформою та щонайменше двома додатковими маховиками, які встановлені через підшипники на обертовій платформі, а локальні осі обертання маховиків розташовані в площині обертової платформи перпендикулярно до другої осі, що...
Спосіб використання тягового зусилля коріоліса (варіанти)
Номер патенту: 80211
Опубліковано: 27.08.2007
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: використання, коріоліса, спосіб, тягового, зусилля, варіанти
Формула / Реферат:
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Гордін Олександр Григорович, Малєва Людмила Сергіївна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літальним, система, апаратом, керування, космічним
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Силова система двигуна внутрішнього згоряння
Номер патенту: 42103
Опубліковано: 15.10.2001
Автор: Белоус Семен Мефодійович
МПК: F02B 75/00, F02B 55/00
Мітки: згоряння, система, силова, внутрішнього, двигуна
Формула / Реферат:
Силова система двигуна внутрішнього згоряння з двома паралельними колінчастими валами, кінематично з'єднаними з поршнем двома шатунами, яка відрізняється тим, що в ціліндровій втулці розміщений поршень з двома робочими поверхнями.
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: гіромоменту, спосіб, компенсації
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Попередній патент: Спосіб визначення оксидної активності мікроорганізмів
Наступний патент: Датчик газовий оптичний із змінною чутливістю
Випадковий патент: Бурове долото купчинського для шарошкового буріння з промиванням вибою