Машина для очищення і нанесення захисного покриття магістральних трубопроводів
Номер патенту: 82397
Опубліковано: 10.04.2008
Автори: Гольденберг Анатолій Менделевич, Карпачов Юрій Андрійович, Павлюк Володимир Миколайович, Іткін Олександр Феліксович, Дьомін Юрій Миколайович, Ротачов Юрій Васильович
Формула / Реферат
Машина для очищення і нанесення захисного покриття магістральних трубопроводів, що містить механізм поздовжнього переміщення її по трубі, виконаний у вигляді колісного візка, механічно з'єднаного з електроприводом, установлений на візку неповноповоротний реверсний механізм, який складається із ротора з розпилювачами матеріалів і електромеханічного приводу, з'єднаного з ним за допомогою ланцюгової передачі, та систему керування, яка відрізняється тим, що колісний візок споряджений додатковим електромеханічним приводом з можливістю незалежного приводу його правих та лівих коліс, система керування споряджена роздільними каналами керування механізмом поздовжнього переміщення і неповноповоротним механізмом, причому перший канал керування складається із послідовно з'єднаних задатчика швидкості поздовжнього переміщення візка, програматора розгону-гальмування, відповідних першого та другого суматорів і першого та другого вихідних підсилювачів потужності, відповідно з'єднаних з електромеханічними приводами правих та лівих коліс поздовжнього переміщення візка, на якому установлений датчик відхилення вертикальної площини, яка проходить через горизонтальні осі машини і труби, від свого положення, зв'язаний з узгоджуючим підсилювачем, вихід якого зв'язаний з другим входом першого суматора, і через інвертор з'єднаний з другим входом другого суматора, а другий канал керування складається із послідовно з'єднаних задатчика кутової швидкості, програматора реверса і вихідного підсилювача потужності, з'єднаний з електромеханічним приводом неповноповоротного переміщення ротора, при цьому на роторі установлений кінцевий вимикач крайніх положень, з'єднаний з другим входом програматора реверса, а через програматор прискорення і вихідний підсилювач потужності - з двома електромеханічними приводами, установленими на неповноповоротному роторі, на вихідних валах яких змонтовані розпилювачі.
Текст
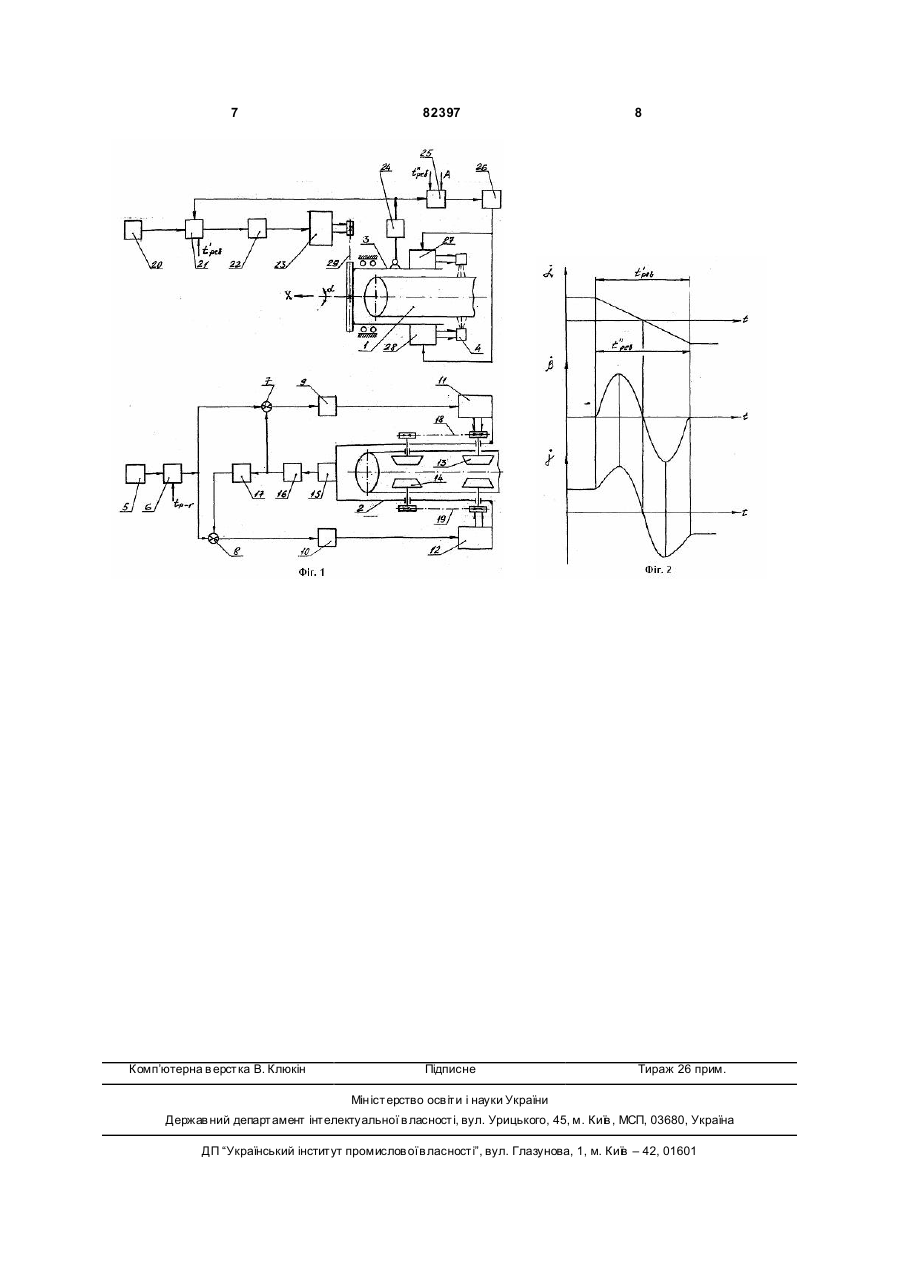
Машина для очищення і нанесення захисного покриття магістральних трубопроводів, що містить механізм поздовжнього переміщення її по трубі, виконаний у вигляді колісного візка, механічно з'єднаного з електроприводом, установлений на візку неповноповоротний реверсний механізм, який складається із ротора з розпилювачами матеріалів і електромеханічного приводу, з'єднаного з ним за допомогою ланцюгової передачі, та систему керування, яка відрізняється тим, що колісний візок споряджений додатковим електромеханічним приводом з можливістю незалежного C2 2 (19) 1 3 82397 кільце, яке одягається на трубу, яка обертається, виконане у вигляді гіперболоїда і занурене нижньою частиною в ємність з рідким ізоляційним матеріалом з можливістю подання рідини на поверхню труби, причому така конструкція кільця дозволяє йому самоустановлюватися під деяким кутом до осі труби, що, в свою чергу, забезпечує збіг прямолінійі твірної кільця з твірної труби, тобто збіг ліній прилягання цих поверхонь у процесі нанесення ізоляційного матеріалу на поверхню труби, при цьому даний процес використовується шляхом перекочування кільця по зовнішній поверхні труби, що дозволяє йому описувати гвинтову лінію і наносити своєю внутрішньою поверхнею матеріал покриття по всій довжині лінії прилягання. Ці пристрої не є системами автоматичного керування, в яких ви хідний сигнал, наприклад, витрата абразиву або ізоляційного матеріалу, є безперервна функція відхилення від заданої величини. Відсутність отакої системи не дозволяє в достатній мірі контролювати параметри процесів, які були названі, що є недоліком таких пристроїв, тому що знижується ефективність їх роботи. Окрім того, цим пристроям притаманний такий недолік: їхнє використання у польових умовах виявляється надто проблематичним. Найбільш близьким по технічній суті до пристрою, який заявляється, є пристрій [патент США №5129355, кл. В05С1/04, від 14.07.1992р.], який складається з механізму поздовжнього переміщення і механізму осциляції розпилювачів для витікання матеріалу з їх поворотом на означений кут і з поверненням у початкове положення, причому механізм осциляції виконаний у вигляді ротора з розпилювачами і системи ланцюгових передач і має пристрій переведення тримачів розпилювачів з ведучої ланки ланцюгової передачі до веденої, що забезпечує переведення механізму на реверсивний рух. Конструктивні особливості цього пристрою дозволяють вертикальної плоскості машини, яка проходить через горизонтальні осі машини і труби, відхилятися на деякий кут, що веде к зайвим витратам матеріалу - особливо ізоляційного, і особливо в польових умовах, через те, що при такому відхиленні збільшується ширина поздовжньої зони перекриття шарів напилення, а отже її площа. В основу винаходу покладена задача удосконалення машини для очищення і нанесення захисного покриття трубопроводів шляхом введення в її конструкцію системи автоматичного керування, яка включає в себе канали керування ходовою і неповноповоротною ( на визначений кут) частинами машини, що дозволить відпрацьовувати заданий закон керування розпилювачами при нанесенні матеріалів на поверхню трубопроводу. Поставлена задача вирішується так, що в машині для очищення і нанесення захисного покриття магістральних трубопроводів, що містить механізм поздовжнього переміщення її по трубі, виконаний у вигляді колісного візка, механічно з'єднаного з електроприводом, установлений на візку неповноповоротний реверсний механізм, який складається із ротору з розпилювачами ма 4 теріалів і електромеханічного приводу, з'єднаного з ним за допомогою ланцюгової передачі, та систему керування, новим є те, що колісний візок споряджений додатковим електромеханічним приводом з можливістю окремого привода його правих та лівих коліс, а її система керування споряджена роздільними каналами керування механізмом поздовжнього переміщення і неповнопо-воротним механізмом, причому перший канал керування, який складається із послідовно з'єднаних задатчика швидкості поздовжнього переміщення візка, програматора розгону-гальмування, відповідних першого та другого суматорів і першого та другого вихідних підсилювачів потужності, з'єднаний з електромеханічними приводами правих та лівих коліс поздовжнього переміщення візка, на якому установлений датчик відхилення вертикальної плоскості, яка проходить через горизонтальні осі машини і труби, від свого положення і зв'язаний з узгоджуючим підсилювачем, вихід якого зв'язаний з другим входомпершого суматора, і через інвертор з'єднаний з другим входом другого суматора, а другий канал керування, який складається із послідовно з'єднаних задатчика кутової швидкості, програматора реверса і вихідного підсилювача потужності, з'єднаний з електромеханічним приводом неповноповоротного переміщення ротора, при цьому установлений на роторі кінцевий вимикач його крайніх положень з'єднаний з другим входом програматора реверсу, а через програматор прискорення і вихідний підсилювач потужності - з двома електромеханічними приводами, установленими на неповноповоротному роторі, на вихідних валах яких змонтовані розпилювачі. Запропонована конструкція машини, яка розглядається, дозволяє зменшити витрати матеріалів при очищенні і нанесенні захисного покриття трубопроводів. Це досягається за рахунок збільшення середньої швидкості розпилювачів у зонах поздовжніх перекриттів шарів з одночасною стабілізацією машини у вертикальній плоскості, що зменшує площу і товщину перекриття шарів. Загальний вид запропонованої машини приведений на Фіг.1, на Фіг.2 показана діаграма реверсного руху неповноповоротної частини машини. Машина використовується у складі комплексу по відновленню антикорозійного покриття існуючих магістральних тр убопроводів нафтогазових мереж, тобто призначена для абразиво-струминного очищення труб і нанесення на них полімерних ізоляційних матеріалів. Машина складається із механізму поздовжнього переміщення її по трубі 1 та неповноповоротного механізму реверсу ротора. Перший механізм виконаний у вигляді колісного візка 2, який переміщується по трубі 1 і на якому розташований другий механізм, який складається із ротору 3 з розпилювачами 4 матеріалів. Керування кожним механізмом здійснюється за допомогою окремих каналів: ходовою та неповноповоротною частинами машини. До каналу керування механізму поздовжнього переміщення машини по трубі 1 належать послідовно з'єднані задатчик швидкості 5 поздовжнього переміщення візка 2, програматор розгону 5 82397 гальмування 6, відповідні перший 7 та другий 8 суматори і вихідні підсилювачі потужності 9 та 10, які з'єднані з електромеханічними приводами 11 та 12 правих 13 і лівих 14 коліс поздовжнього переміщення візка 2. На рамі цього візка установлений датчик 15 відхилення вертикальної плоскості машини, яка проходить через горизонтальні осі машини і труби, на деякий кут, при цьому датчик 15 зв'язаний з узгоджуючим підсилювачем 16, вихід якого зв'язаний з другим входом суматора 7, і через інвертор 17 зв'язаний з другим входом суматора 8. Колеса 13 з'єднані один з одним за допомогою ланцюгової передачі 18, а колеса 14 - за допомогою ланцюгової передачі 19. До каналу керування неповноповоротного механізму реверсу ротора 3 належать послідовно з'єднані задатчик кутової швидкості 20, програматор реверсу 21 і вихідний підсилювач потужності 22, які з'єднані з електромеханічним приводом 23 неповноповоротного переміщення ротора 3. З метою змінювання напрямку обертання ротора 3 використовується кінцевий вимикач 24 крайніх положень ротора 3, з'єднаний з другим входом програматора реверсу 21, а через програматор прискорення 25 і вихідний підсилювач потужності 26 з'єднаний з двома електромеханічними приводами 27 і 28, які установлені на роторі 3, причому на вихідних валах цих приводів змонтовані розпилювачі 4. Електромеханічний привод 23 з'єднаний з ротором 3 за допомогою ланцюгової передачі 29. Робота машини здійснюється таким чином. При роботі машини колісний візок 2 переміщується по трубі 1 з заданою швидкістю, а ротор 3 з розпилювачами 4 обертається на певний кут щодо осі труби 1 з заданою кутовою швидкістю. Перед початком роботи оператором установлюється на програматорі розгону-гальмування 6 час розгону tр і гальмування tг ходової частини машини, а також на програматорі реверсу 21 час реверсу tрев' ротора 3, а на програматорі прискорення 25 час реверсу tрев" та амплітуду А відносної кутової швидкості розпилювачів 4. З задатчика кутової швидкості 20 на вхід програматора реверсу 20 подається постійна напруга, пропорційна заданій швидкості обертання ротору 3 з розпилювачами 4, а на другий вхід цього програматора подається сигнал кінцевого вимикача 24 про початок зміни напрямку обертання розпилювачів 4. Відповідно до цих вхідних сигналів, у тому числі відповідно з величиною tрев', програматор реверсу 21 утворює двополярний вихідний сигнал постійної напруги із зміною полярності під час реверсу за лінійним законом, при цьому цей сигнал через вихідний підсилювач потужності 22 потрапляє на електромеханічний привод 23, вихідний вал якого розвиває обертаючий момент, при 6 кладений через ланцюгову передачу 29 до ротора 3, відтворюючи заданий закон керування його швидкістю. Одночасно із сигналом кінцевого вимикача 24 програматором прискорення 25 виробляється синусоїдальний вихідний сигнал (Фіг.2), який через вихідний підсилювач потужності 26 потрапляє до електромеханічних приводів 27 і 28, збільшуючи середню абсолютну куто ву швидкість (пряму і зворотну) розпилювачів 4 під час реверсу ротора 3, що призводить до зменшення товщини захисного шару в зонах поздовжніх перекриттів. Одночасно з початком обертових коливань розпилювачів 4 з задатчика швидкості 5 поздовжнього переміщення візка 2 на вхід програматора розгону-гальмування 6 подається постійна напруга, пропорційна заданій швидкості пересування машини. Відповідно до цього вхідного сигналу, а також відповідно з величиною tр-Г, програма-тор розгону-гальмування 6 утворює однополярний вихідний сигнал постійної напруги із зміною його величини під час розгону і гальмування машини за лінійним законом. Цей сигнал через суматори 7 та 8 і вихідні підсилювачі потужності 9 та 10 потрапляє до електромеханічних приводів 11 та 12, при цьому обертаючі моменти прикладаються до правих 13 і лівих 14 коліс поздовжнього переміщення візка 2, відтворюючи заданий закон пересування машини за напрямком X. При відхиленні вертикальної плоскості машини, яка проходить через горизонтальні осі машини і труби 1, на деякий кут вихідний сигнал датчика 15, пропорційний куту відхилення, через узгоджуючий підсилювач 16, суматор 7 та вихідний підсилювач потужності 9 потрапляє на вхід електромеханічного привода 11, а через інвертор 17, суматор 8 та вихідний підсилювач потужності 10 на вхід електромеханічного привода 12, в результаті чого швидкість обертання коліс 13 збільшується (зменшується), а коліс 14 -зменшується (збільшується), що призводить до зменшення кута відхилення згаданої вертикальної плоскості відносно горизонтальної осі труби 1. Обладнання машини автоматичною системою, яка стабілізує положення цієї вертикальної плоскості, дозволяє зменшити ширину поздовжньої зони перекриття шарів, а отже її площу. Зазначимо, що прискорення руху розпилювачів під час реверсу технічно неможливе за умов великої ширини поздовжньої зони перекриття. На Фіг.2 приведена діаграма реверсного руху & неповноповоротної частини машини, де: a - аб& - відносна солютна кутова швидкість ротора, b & кутова швидкість розпилювача, g - абсолютна кутова швидкість розпилювача, t¢рев , t¢¢ рев - час реверсу неповнопово-ротного ротора і розпилювачів. 7 Комп’ютерна в ерстка В. Клюкін 82397 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine for cleaning and application of protective coating of main pipelines
Автори англійськоюHoldenberh Anatolii Mendelevych, Diomin Yurii Mykolaiovych, Itkin Oleksandr Feliksovych, Karpachov Yurii Andriiovych, Pavliuk Volodymyr Mykolaiovych, Rotachov Yurii Vasyliovych
Назва патенту російськоюМашина для очистки и нанесения защитного покрытия трубопроводов
Автори російськоюГольденберг Анатолий Менделевич, Демин Юрий Николаевич, Иткин Александр Феликсович, Карпачев Юрий Андреевич, Павлюк Владимир Николаевич, Ротачов Юрий Васильевич
МПК / Мітки
Мітки: нанесення, покриття, захисного, очищення, машина, магістральних, трубопроводів
Код посилання
<a href="https://ua.patents.su/4-82397-mashina-dlya-ochishhennya-i-nanesennya-zakhisnogo-pokrittya-magistralnikh-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Машина для очищення і нанесення захисного покриття магістральних трубопроводів</a>
Машина для очищення і нанесення захисного покриття магістральних трубопроводів
Номер патенту: 81320
Опубліковано: 25.12.2007
Автори: Гольденберг Анатолій Менделевич, Ротачов Юрій Васильович, Карпачов Юрій Андрійович, Іткін Олександр Феліксович, Павлюк Володимир Миколайович, Дьомін Юрій Миколайович
МПК: B08B 9/02, F16L 59/00, G05B 11/00
Мітки: нанесення, машина, трубопроводів, очищення, захисного, покриття, магістральних
Формула / Реферат:
Машина для очищення і нанесення захисного покриття магістральних трубопроводів, що містить механізм поздовжнього переміщення її по трубі, виконаний у вигляді колісного візка, механічно з'єднаного з електроприводом, установлений на візку неповноповоротний реверсний механізм, який складається із ротора з розпилювачами матеріалів і електромеханічного приводу, з'єднаного з ним за допомогою ланцюгової передачі, та систему керування, яка...
Спосіб нанесення захисного оксидного покриття на алюміній та його сплави, розчин для термічної обробки та колоїдна суспензія для ущільнення покриття
Номер патенту: 79345
Опубліковано: 11.06.2007
Автори: Малишевська Ольга Степанівна, Роп'як Любомир Ярославович, Білінський Віталій Михайлович
МПК: C25D 11/18
Мітки: розчин, суспензія, оксидного, ущільнення, нанесення, термічної, покриття, спосіб, захисного, обробки, колоїдна, алюміній, сплави
Формула / Реферат:
1. Спосіб нанесення захисного оксидного покриття на алюміній та його сплави, який включає промивання та обробку поверхні металу, нанесення анодно-оксидного покриття і заключну обробку, який відрізняється тим, що нанесене анодно-оксидне покриття на алюміній та його сплави додатково піддають термічній обробці при температурі 80-95°С у водному розчині етилового спирту в присутності йоду протягом 15-25 хв., після чого здійснюють ущільнення у...
Пристрій для газотермічного нанесення захисного покриття

Номер патенту: 11950
Опубліковано: 16.01.2006
Автори: Аралкін Анатолій Сергійович, Давида Андрій Йосипович
МПК: C23C 4/12
Мітки: нанесення, газотермічного, захисного, покриття, пристрій
Формула / Реферат:
1. Пристрій для газотермічного нанесення захисного покриття, який містить плазмотрон, трубчастий кожух, ресивер зі штуцерами для підведення газу, що змонтований на зовнішній поверхні нижньої частини кожуха, ежектор у вигляді диска з маточиною, що закріплений у ресивері з зазором щодо трубчастого кожуха, який відрізняється тим, що диск ежектора виконаний з можливістю зворотно-поступального переміщення щодо трубчастого кожуха й оснащений...
Спосіб нанесення захисного покриття на графітований електрод

Номер патенту: 44162
Опубліковано: 16.08.2004
Автори: ГАЛЮК МИКОЛА ПИЛИПОВИЧ, КИСЄЛЬОВ СЕРГІЙ МИХАЙЛОВИЧ, РУСЄВ ГЕННАДІЙ МИХАЙЛОВИЧ, ОВСЯНІКОВ ВІКТОР ВАСИЛЬОВИЧ
МПК: C23C 4/06, C23C 4/12, C23C 4/18, B05B 7/16, H05H 1/26
Мітки: спосіб, електрод, покриття, нанесення, захисного, графітований
Формула / Реферат:
Спосіб нанесення захисного покриття на графітований електрод, який включає плазмове напилення матеріалу покриття на поверхню електрода, яку захищають, при обертанні електрода навколо подовжньої осі, який відрізняється тим, що одночасно з напилюванням матеріалу покриття здійснюють механічне ущільнення покриття при синхронному обертанні графітованого електрода та засобу, який здійснює механічне ущільнення, при цьому матеріал покриття, який...
Пристрій для нанесення захисного покриття
Номер патенту: 23181
Опубліковано: 10.05.2007
Автори: Жучинський Леонід Андрійович, Стоян Сергій Леонідович, Рашковський Олександр Саулович, Свистунов Микола Васильович
МПК: C23C 8/02, B05B 13/00
Мітки: нанесення, захисного, пристрій, покриття
Формула / Реферат:
1. Пристрій для нанесення захисного покриття, що містить каретку з приводом, на якому встановлений розпилювач, який відрізняється тим, що каретка містить високочастотний індуктор і бак-змішувач, з'єднаний із системою стиснутого повітря й інжектором, установленим перед розпилювачем.2. Пристрій за п. 1, який відрізняється тим, що перед розпилювачем на каретці встановлені шкребки і зачисні щітки.
Попередній патент: Пристрій для ізоляції ліквідованого вертикального глибокого стовбура шахти від земної поверхні та спосіб його спорудження
Наступний патент: Тканий рукав та блокувальна нитка, що входить у склад тканини рукава (варіанти)
Випадковий патент: Гичкозрізувальний пристрій