Індуктивний датчик
Формула / Реферат
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали зв'язано з суматором, який відрізняється тим, що застосовано додатковий ідентичний плаский прохідний якір Т-подібної форми, розташований симетрично з протилежного боку магнітопроводів з котушками на одній осі з основним пласким прохідним якорем Т-подібної форми та скріплений з ним немагнітною перемичкою.
Текст
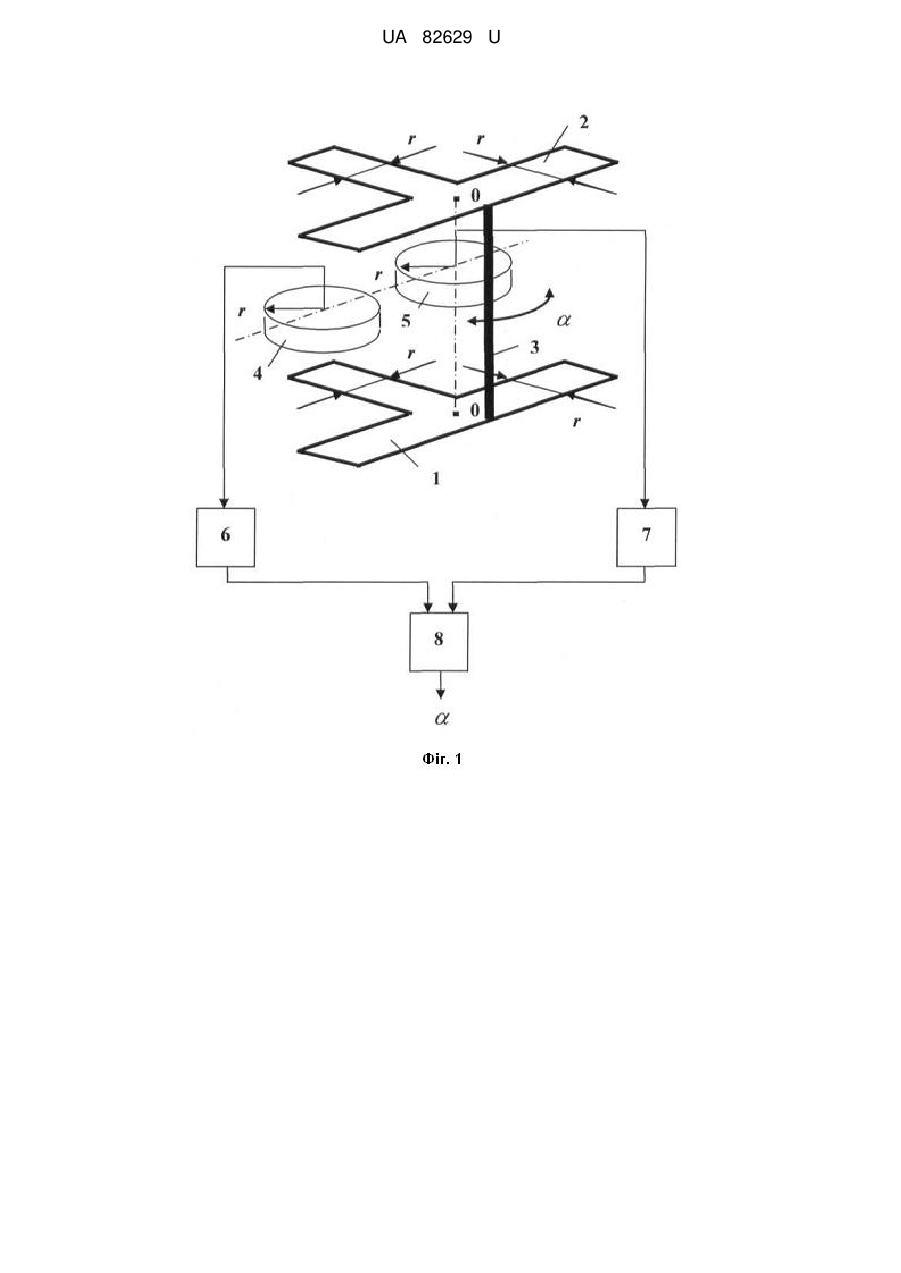
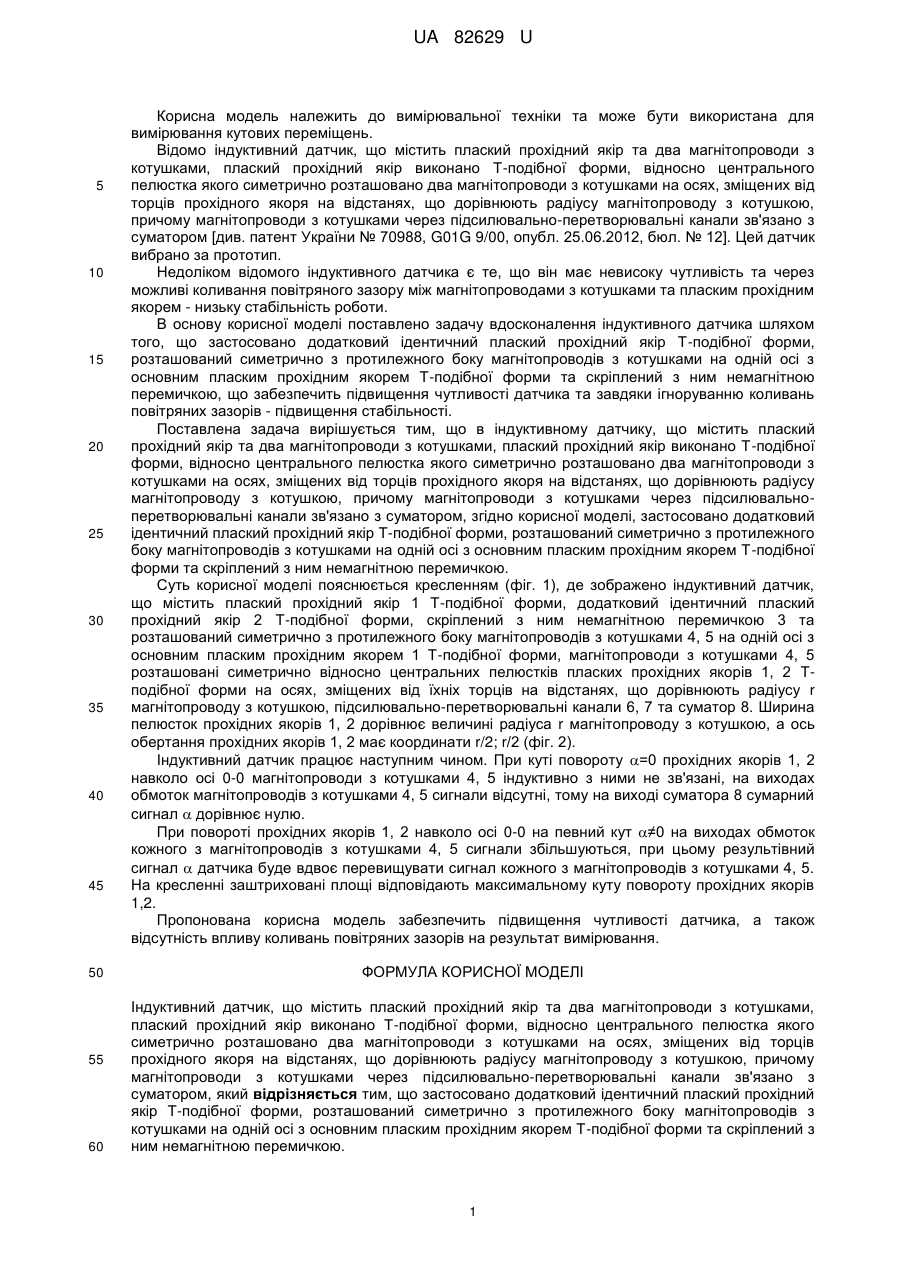
Реферат: UA 82629 U UA 82629 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання кутових переміщень. Відомо індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали зв'язано з суматором [див. патент України № 70988, G01G 9/00, опубл. 25.06.2012, бюл. № 12]. Цей датчик вибрано за прототип. Недоліком відомого індуктивного датчика є те, що він має невисоку чутливість та через можливі коливання повітряного зазору між магнітопроводами з котушками та пласким прохідним якорем - низьку стабільність роботи. В основу корисної моделі поставлено задачу вдосконалення індуктивного датчика шляхом того, що застосовано додатковий ідентичний плаский прохідний якір Т-подібної форми, розташований симетрично з протилежного боку магнітопроводів з котушками на одній осі з основним пласким прохідним якорем Т-подібної форми та скріплений з ним немагнітною перемичкою, що забезпечить підвищення чутливості датчика та завдяки ігноруванню коливань повітряних зазорів - підвищення стабільності. Поставлена задача вирішується тим, що в індуктивному датчику, що містить плаский прохідний якір та два магнітопроводи з котушками, плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювальноперетворювальні канали зв'язано з суматором, згідно корисної моделі, застосовано додатковий ідентичний плаский прохідний якір Т-подібної форми, розташований симетрично з протилежного боку магнітопроводів з котушками на одній осі з основним пласким прохідним якорем Т-подібної форми та скріплений з ним немагнітною перемичкою. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено індуктивний датчик, що містить плаский прохідний якір 1 Т-подібної форми, додатковий ідентичний плаский прохідний якір 2 Т-подібної форми, скріплений з ним немагнітною перемичкою 3 та розташований симетрично з протилежного боку магнітопроводів з котушками 4, 5 на одній осі з основним пласким прохідним якорем 1 Т-подібної форми, магнітопроводи з котушками 4, 5 розташовані симетрично відносно центральних пелюстків пласких прохідних якорів 1, 2 Тподібної форми на осях, зміщених від їхніх торців на відстанях, що дорівнюють радіусу r магнітопроводу з котушкою, підсилювально-перетворювальні канали 6, 7 та суматор 8. Ширина пелюсток прохідних якорів 1, 2 дорівнює величині радіуса r магнітопроводу з котушкою, а ось обертання прохідних якорів 1, 2 має координати r/2; r/2 (фіг. 2). Індуктивний датчик працює наступним чином. При куті повороту =0 прохідних якорів 1, 2 навколо осі 0-0 магнітопроводи з котушками 4, 5 індуктивно з ними не зв'язані, на виходах обмоток магнітопроводів з котушками 4, 5 сигнали відсутні, тому на виході суматора 8 сумарний сигнал дорівнює нулю. При повороті прохідних якорів 1, 2 навколо осі 0-0 на певний кут ≠0 на виходах обмоток кожного з магнітопроводів з котушками 4, 5 сигнали збільшуються, при цьому результівний сигнал датчика буде вдвоє перевищувати сигнал кожного з магнітопроводів з котушками 4, 5. На кресленні заштриховані площі відповідають максимальному куту повороту прохідних якорів 1,2. Пропонована корисна модель забезпечить підвищення чутливості датчика, а також відсутність впливу коливань повітряних зазорів на результат вимірювання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали зв'язано з суматором, який відрізняється тим, що застосовано додатковий ідентичний плаский прохідний якір Т-подібної форми, розташований симетрично з протилежного боку магнітопроводів з котушками на одній осі з основним пласким прохідним якорем Т-подібної форми та скріплений з ним немагнітною перемичкою. 1 UA 82629 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюInductive sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюИндуктивный датчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, індуктивний
Код посилання
<a href="https://ua.patents.su/4-82629-induktivnijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Індуктивний датчик</a>
Індуктивний датчик

Номер патенту: 81795
Опубліковано: 10.07.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, датчик
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір Δ-подібної форми, відносно бокових торців якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстань, що дорівнює половині радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали зв'язано з диференціальним підсилювачем, який відрізняється тим, що застосовано додатковий...
Індуктивний датчик
Номер патенту: 77857
Опубліковано: 25.02.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, індуктивний
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано -подібної форми, відносно бокових торців якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстані, що дорівнюють радіусу магнітопроводу з котушкою, причому...
Індуктивний датчик
Номер патенту: 70988
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, датчик
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали...
Індуктивний датчик
Номер патенту: 75324
Опубліковано: 26.11.2012
Автор: Смірний Михайло Федорович
МПК: G01B 7/00
Мітки: індуктивний, датчик
Формула / Реферат:
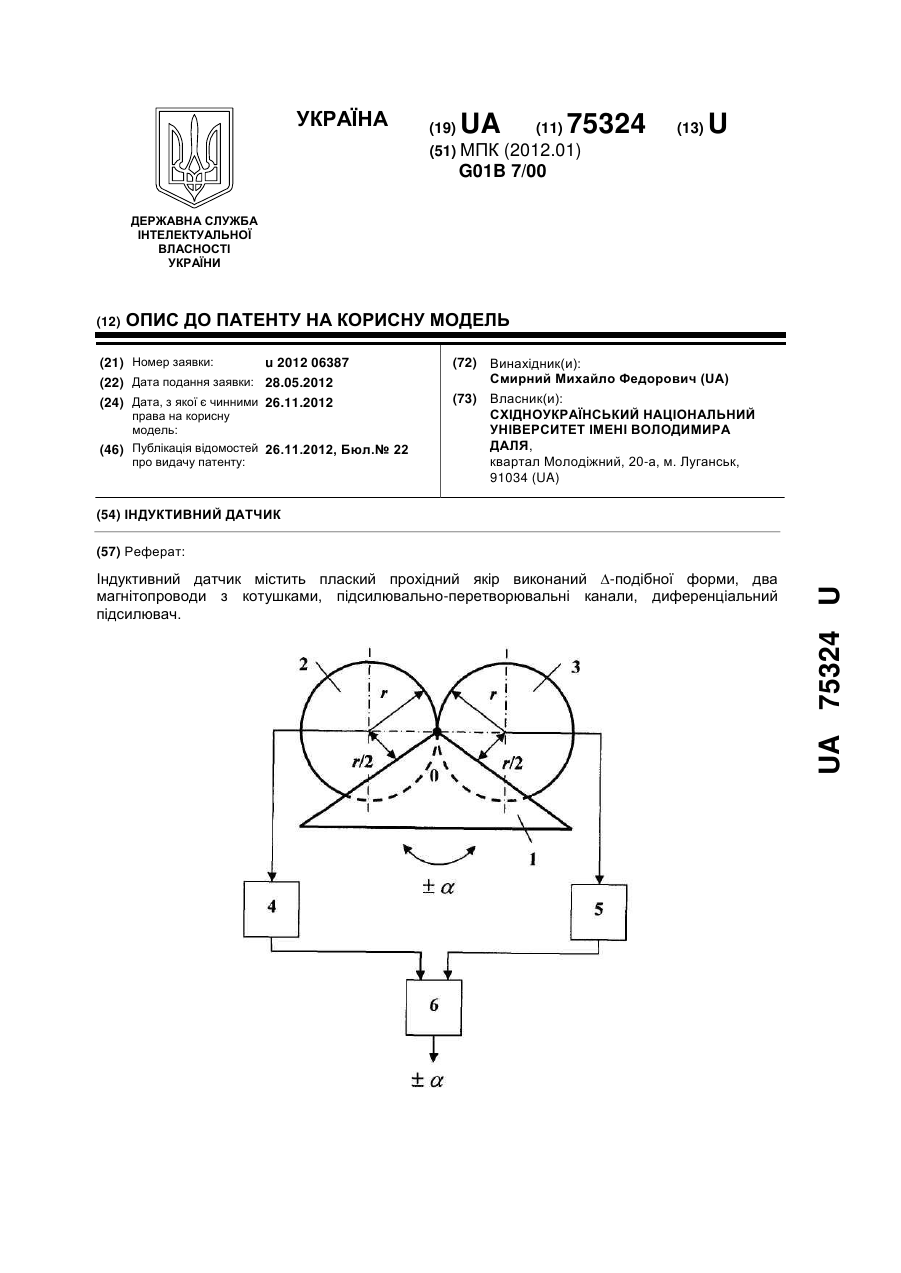
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано D-подібної форми, відносно бокових торців якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстань, що дорівнює половині радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через з підсилювально-перетворювальні канали...
Диференціальний індуктивний датчик
Номер патенту: 81794
Опубліковано: 10.07.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, диференціальний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик, що містить першу та другу пари магнітопроводів з котушками, розміщені у зонах протилежних торців прохідного якоря на осях, зміщених від торців прохідного якоря на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, при цьому магнітопроводи з котушками з'єднані з підсилювально-перетворювальними каналами, а магнітопроводи з котушками, які розташовані на одних осях, через...
Попередній патент: Датчик переміщень
Наступний патент: Індуктивний датчик
Випадковий патент: Інсектицидні сполуки