Пристрій для безперервного гравіметричного дозування
Формула / Реферат
1. Пристрій для безперервного гравіметричного дозування та визначення масової витрати потоку текучого матеріалу в дозувальному пристрої (4), з установленням миттєвого значення масової витрати перед точкою виходу за допомогою блока регулювання дозуванням (10), причому керування вивантаженням здійснюється шляхом зміни числа обертів приводу (6) дозувального пристрою (4) за допомогою блока керування двигуном (20), який відрізняється тим, що блок керування дозуванням (10) та блок керування двигуном (20), виконаний як перетворювач частоти або тиристорний блок керування,
об'єднані в єдиному вузлі (G), причому зазначений єдиний вузол (G) розташований у шафі керування або усередині дозувального пристрою (4).
2. Пристрій за п. 1, який відрізняється тим, що зазначений єдиний вузол (G) об'єднаний з приводом дозувального пристрою (4).
3. Пристрій за п. 1 або 2, який відрізняється тим, що привод (6) дозувального пристрою (4) містить лічильник обертів, зокрема тахогенератор (6а), для визначення фактичного числа обертів, причому лічильник обертів з'єднаний з блоком керування дозуванням (10), або дозувальний пристрій (4) містить окремий лічильник обертів, наприклад фрикційне колесо або датчик імпульсів.
4. Пристрій за пп. 1-3, який відрізняється тим, що блок керування дозуванням (10) містить принаймні одну інтегрувальну схему для визначення відхилення у точці виходу (8) матеріалу або одразу після неї та коригування заданого значення у блоці керування дозуванням (10).
5. Пристрій за п. 4, який відрізняється тим, що у блоці керування дозуванням (10) передбачений порівнювальний модуль для зміни повздовжнього розташування точки попереднього регулювання (Р) зусиллям подачі матеріалу.
6. Пристрій за пп. 1-5, який відрізняється тим, що привод (6) дозувального пристрою являє собою асинхронний, синхронний, векторний або реактивний синхронний двигун.
Текст
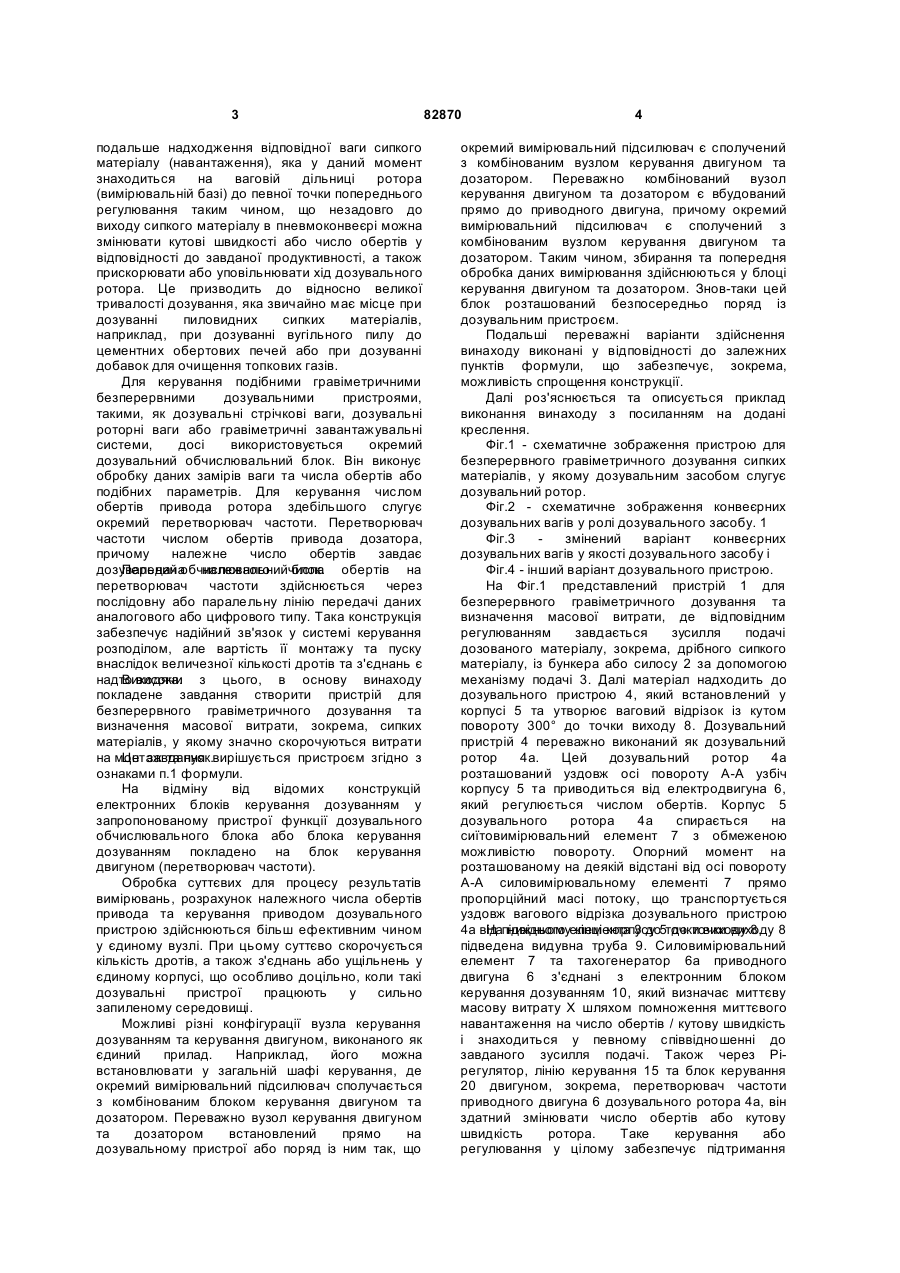
1. Пристрій для безперервного гравіметричного дозування та визначення масової витрати потоку текучого матеріалу в дозувальному пристрої (4), з установленням миттєвого значення масової витрати перед точкою виходу за допомогою блока регулювання дозуванням (10), причому керування вивантаженням здійснюється шляхом зміни числа обертів приводу (6) дозувального пристрою (4) за допомогою блока керування двигуном (20), який відрізняється тим, що блок керування дозуванням (10) та блок керування двигуном (20), виконаний як перетворювач частоти або тиристорний блок керування, C2 2 82870 1 3 подальше надходження відповідної ваги сипкого матеріалу (навантаження), яка у даний момент знаходиться на ваговій дільниці ротора (вимірювальній базі) до певної точки попереднього регулювання таким чином, що незадовго до виходу сипкого матеріалу в пневмоконвеєрі можна змінювати кутові швидкості або число обертів у відповідності до завданої продуктивності, а також прискорювати або уповільнювати хід дозувального ротора. Це призводить до відносно великої тривалості дозування, яка звичайно має місце при дозуванні пиловидних сипких матеріалів, наприклад, при дозуванні вугільного пилу до цементних обертових печей або при дозуванні добавок для очищення топкових газів. Для керування подібними гравіметричними безперервними дозувальними пристроями, такими, як дозувальні стрічкові ваги, дозувальні роторні ваги або гравіметричні завантажувальні системи, досі використовується окремий дозувальний обчислювальний блок. Він виконує обробку даних замірів ваги та числа обертів або подібних параметрів. Для керування числом обертів привода ротора здебільшого слугує окремий перетворювач частоти. Перетворювач частоти числом обертів привода дозатора, причому належне число обертів завдає дозувальний обчислювальнийчисла обертів на Передача належного блок. перетворювач частоти здійснюється через послідовну або паралельну лінію передачі даних аналогового або цифрового типу. Така конструкція забезпечує надійний зв'язок у системі керування розподілом, але вартість її монтажу та пуску внаслідок величезної кількості дротів та з'єднань є надто висока. з цього, в основу винаходу Виходячи покладене завдання створити пристрій для безперервного гравіметричного дозування та визначення масової витрати, зокрема, сипких матеріалів, у якому значно скорочуються витрати на монтаж та пуск.вирішується пристроєм згідно з Це завдання ознаками п.1 формули. На відміну від відомих конструкцій електронних блоків керування дозуванням у запропонованому пристрої функції дозувального обчислювального блока або блока керування дозуванням покладено на блок керування двигуном (перетворювач частоти). Обробка суттєвих для процесу результатів вимірювань, розрахунок належного числа обертів привода та керування приводом дозувального пристрою здійснюються більш ефективним чином у єдиному вузлі. При цьому суттєво скорочується кількість дротів, а також з'єднань або ущільнень у єдиному корпусі, що особливо доцільно, коли такі дозувальні пристрої працюють у сильно запиленому середовищі. Можливі різні конфігурації вузла керування дозуванням та керування двигуном, виконаного як єдиний прилад. Наприклад, його можна встановлювати у загальній шафі керування, де окремий вимірювальний підсилювач сполучається з комбінованим блоком керування двигуном та дозатором. Переважно вузол керування двигуном та дозатором встановлений прямо на дозувальному пристрої або поряд із ним так, що 82870 4 окремий вимірювальний підсилювач є сполучений з комбінованим вузлом керування двигуном та дозатором. Переважно комбінований вузол керування двигуном та дозатором є вбудований прямо до приводного двигуна, причому окремий вимірювальний підсилювач є сполучений з комбінованим вузлом керування двигуном та дозатором. Таким чином, збирання та попередня обробка даних вимірювання здійснюються у блоці керування двигуном та дозатором. Знов-таки цей блок розташований безпосередньо поряд із дозувальним пристроєм. Подальші переважні варіанти здійснення винаходу виконані у відповідності до залежних пунктів формули, що забезпечує, зокрема, можливість спрощення конструкції. Далі роз'яснюється та описується приклад виконання винаходу з посиланням на додані креслення. Фіг.1 - схематичне зображення пристрою для безперервного гравіметричного дозування сипких матеріалів, у якому дозувальним засобом слугує дозувальний ротор. Фіг.2 - схематичне зображення конвеєрних дозувальних вагів у ролі дозувального засобу. 1 Фіг.3 змінений варіант конвеєрних дозувальних вагів у якості дозувального засобу і Фіг.4 - інший варіант дозувального пристрою. На Фіг.1 представлений пристрій 1 для безперервного гравіметричного дозування та визначення масової витрати, де відповідним регулюванням завдається зусилля подачі дозованого матеріалу, зокрема, дрібного сипкого матеріалу, із бункера або силосу 2 за допомогою механізму подачі 3. Далі матеріал надходить до дозувального пристрою 4, який встановлений у корпусі 5 та утворює ваговий відрізок із кутом повороту 300° до точки виходу 8. Дозувальний пристрій 4 переважно виконаний як дозувальний ротор 4а. Цей дозувальний ротор 4а розташований уздовж осі повороту A-A узбіч корпусу 5 та приводиться від електродвигуна 6, який регулюється числом обертів. Корпус 5 дозувального ротора 4а спирається на сиїтовимірювальний елемент 7 з обмеженою можливістю повороту. Опорний момент на розташованому на деякій відстані від осі повороту A-A силовимірювальному елементі 7 прямо пропорційний масі потоку, що транспортується уздовж вагового відрізка дозувального пристрою 4а від підвідного елемента 3 до5точки виходу 8. 8 На нижньому кінці корпусу до точки виходу підведена видувна труба 9. Силовимірювальний елемент 7 та тахогенератор 6а приводного двигуна 6 з'єднані з електронним блоком керування дозуванням 10, який визначає миттєву масову витрату X шляхом помноження миттєвого навантаження на число обертів / кутову швидкість і знаходиться у певному співвідношенні до завданого зусилля подачі. Також через Piрегулятор, лінію керування 15 та блок керування 20 двигуном, зокрема, перетворювач частоти приводного двигуна 6 дозувального ротора 4а, він здатний змінювати число обертів або кутову швидкість ротора. Таке керування або регулювання у цілому забезпечує підтримання 5 постійного значення завданого зусилля подачі. Якщо на дозувальному пристрої 4 відбувається мінусове відхилення (наприклад, -0,2%), то заради підтримання постійного значення зусилля подачі X кутова швидкість дозувального ротора 4а збільшується на відповідну величину, у даному разі також +0,2%, за допомогою шляху регулювання, зображеного на Фіг.1, який сам по собі є відомий. Подібний блок керування дозуванням 10 передбачений також у наступних, нових варіантах виконання за Фіг.2-4, де, однак, цей блок дозуванням 10? який є новим, прямо з'єднаний з блоком 20 керування приводом у єдиному вузлі G. Тут особливо важливим є те, що завдяки з'єднанню або підключенню блока керування дозуванням 10 до блоку 20 керування приводом (здебільшого перетворювача частоти) кількість дротів та ущільнень зведена до мінімуму, а це суттєво знижує вартість дозувального пристрою 4, у тому числі й дозувальних вагів, схематично зображених н Фіг.2-4. До того ж прискорюється обмін даними на дозувальному пристрої 4, зокрема, потік сигналів із такими параметрами, як швидкість обертання, число обертів, вагові сигнали від силовимірювального елемента 7 тощо. Таким чином виникає можливість через конструктивне об'єднання блока керування дозуванням 10 та блока 20 керування приводом при практичній відсутності ланцюга сигналізації 15, зображеного на Фіг.1, регулювати число обертів майже без запізнювання. У нових варіантах виконання також можливо надалі мінімізувати відхилення від завданої величини, як і на Фіг.1, де зображені порівнювальні модулі або інтегрувальні схеми. Якщо, наприклад, введене до точки попереднього регулювання P (порівняй Фіг.1 та раніше опубліковану заявку [WO 99/13302 того ж заявника] завдане значення потрібного зусилля подачі не досягає приводного двигуна 6 внаслідок інерції, то можна шляхом попереднього зсуву точки попереднього регулювання P відносно точки виходу 8 встановити необхідний проміжок часу для прискорення або гальмування дозувального пристрою 4 так, щоб у точці виходу 8 була 82870 6 досягнута завдана швидкість, і таким чином керування зусиллям подачі матеріалу W за допомогою дозувального пристрою 4. При цьому точка попереднього регулювання P має встановлюватися як найближче до точки виходу 8, щоб перетворювач частоти - блок 20 регулювання приводу - міг досить швидко встановлювати зусилля розгону/гальмування приводного двигуна 6. На Фіг.3 зображено переважний варіант виконання пристрою для безперервного гравіметричного дозування та визначення масової витрати потоку, де вузол G являє собою комбінований пристрій керування дозуванням та керування приводом 10/20; в іншому ця конструкція не відрізняється від наведеної на Фіг.1 та 2. Вузол G прямо з'єднаний з приводним двигуном 6 дозувального пристрою 4. Миттєве навантаження на дозувальну стрічку можна також змінювати шляхом регулювання числа обертів приводного двигуна 6 з урахуванням поточного моменту інерції, щоб підтримувати завдане зусилля подачі W. конструкцією Визначені геометричні параметри, наприклад, власну масу та довжину дозувальної стрічки, можна зберігати у пам’яті блока керування дозуванням 10 так, щоб, одержавши виміряні тахогенератором 6а або датчиком імпульсів істинні значення кутової швидкості дозувального пристрою 4, вводити завдане силовимірювальним елементом 7 навантаження у точці виходу 8, що забезпечує наступне регулювання швидкості подачі шляхом прискорення/гальмування привода. Хоча як приклади дозувального пристрою 4 тут наведені дозувальний ротор та дозувальні ваги, описаний пристрій для керування та регулювання може бути застосований також до шнекового конвеєра або подібного дозувального пристрою для підвищення миттєвої точності дозування на позиції вивантаження або скидання матеріалу з належним урахуванням моменту інерції. З цією метою вузол G може також бути вбудований досередини дозувального пристрою 4, як зображено на Фіг.4 на прикладі додаткової проміжної камери дозування стрічкових вагів. Така конструкція виявляється особливо компактною. 7 Комп’ютерна верстка В. Клюкін 82870 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for continuous gravimetric dosing
Автори англійськоюVolfshaffner Hubert
Назва патенту російськоюУстройство для непрерывного гравиметрического дозирования
Автори російськоюВольфшаффнер Губерт
МПК / Мітки
МПК: G01G 11/00
Мітки: пристрій, дозування, безперервного, гравіметричного
Код посилання
<a href="https://ua.patents.su/4-82870-pristrijj-dlya-bezperervnogo-gravimetrichnogo-dozuvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для безперервного гравіметричного дозування</a>
Спосіб та пристрій для безперервного гравіметричного дозування сипких матеріалів до випалювальних пристроїв
Номер патенту: 82534
Опубліковано: 25.04.2008
Автор: Вольфшаффнер Губерт
МПК: G01G 11/00
Мітки: гравіметричного, сипких, пристрій, спосіб, дозування, матеріалів, пристроїв, випалювальних, безперервного
Формула / Реферат:
1. Спосіб безперервного гравіметричного дозування сипких матеріалів до випалювальних пристроїв, у якому встановлюють моментальне значення маси потоку та здійснюють дозування за допомогою дозувального пристрою, який відрізняється тим, що визначають вид кожного сипкого матеріалу, за відомою індивідуальною теплотворною здатністю визначеного сипкого матеріалу встановлюють моментальне значення теплотворної здатності маси потоку сипкого матеріалу...
Спосіб та пристрій для гравіметричного дозування сипкого матеріалу
Номер патенту: 77219
Опубліковано: 15.11.2006
Автор: Вольфшаффнер Губерт
МПК: G01G 13/00, B65G 65/30
Мітки: дозування, матеріалу, сипкого, пристрій, гравіметричного, спосіб
Формула / Реферат:
1. Спосіб гравіметричного дозування сипкого матеріалу, що подають з бункера до накопичувальної ємності, зважують в ній шляхом визначення вагового сигналу, який надсилають до електронної зважувальної системи, та вивантажують з ємності до гравіметричного дозатора, сипкий матеріал попередньо витримують у проміжній ємності (6) перед зважуванням у накопичувальній ємності (1) і вивантажують лише після досягнення вирівняної величини тиску, який...
Пристрій для безперервного гравіметричного вимірювання та пневматичного транспортування сипкого матеріалу
Номер патенту: 76306
Опубліковано: 17.07.2006
Автори: Вольфшаффнер Губерт, Хефнер Ганс Вільгельм
МПК: B65G 53/40, G01G 11/00, G01G 13/00
Мітки: вимірювання, транспортування, пневматичного, безперервного, сипкого, гравіметричного, матеріалу, пристрій
Формула / Реферат:
1. Пристрій для безперервного гравіметричного дозування та пневматичного транспортування сипких матеріалів, що містить на вимірювальній ділянці роторний дозатор (1), герметично встановлений у корпусі (2) та оснащений транспортними карманами (1a), причому корпус містить ділянку завантаження матеріалу та ділянку розвантаження, з'єднані з лініями живлення/розвантаження (4, 5) пневмоконвеєрної системи та зв’язані з пристроєм вимірювання сили,...
Пристрій безперервного дозування води
Номер патенту: 81512
Опубліковано: 10.01.2008
Автори: Заболотний Віталій Анисимович, Кошовий Микола Дмитрович, Заболотний Олександр Віталійович
МПК: G05D 22/00
Мітки: дозування, пристрій, безперервного, води
Формула / Реферат:
Пристрій безперервного дозування води, що складається з давача вологості, який через вологомір підключений до блока віднімання, до інших входів котрого також підключені вихід задавача вологості та вихід блока задавання точності, виходи блока віднімання з'єднані з відповідними входами схеми порівняння, що своїми виходами під'єднана до індикатора ступеня обводнення, блока реле, до входу якого приєднано індикатор правильності роботи, а виходи...
Пристрій для вагового дозування дрібносипучих матеріалів
Номер патенту: 71655
Опубліковано: 15.12.2004
Автори: Гончаренко Олег Григорович, Водоніс Володимир Олексійович, Пайвін Василь Володимирович, Биковець Володимир Володимирович
МПК: G01G 13/00
Мітки: матеріалів, дозування, дрібносипучих, вагового, пристрій
Формула / Реферат:
1. Пристрій для вагового дозування дрібносипучих матеріалів, що містить витратний бункер з послідовно розміщеними під ним живильником і ваговим бункером із затвором, пристрій керування дозуванням, задавач дози і силомірні датчики, виходи яких підключені до пристрою керування дозуванням, підключеному до керуючого входу живильника і виходу задавача дози, який відрізняється тим, що він містить генератор імпульсів, витратний бункер містить...
Попередній патент: Пристрій для вимірювання і реєстрації параметрів поступального та обертального руху об’єктів досліджень
Наступний патент: Фармацевтична композиція для місцевого застосування, яка містить кетопрофен
Випадковий патент: Система контролю витрати палива